EUROPA: A Case Study for Teaching Sensors, Data Acquisition and Robotics via a ROS-Based Educational Robot



Abstract
:1. Introduction
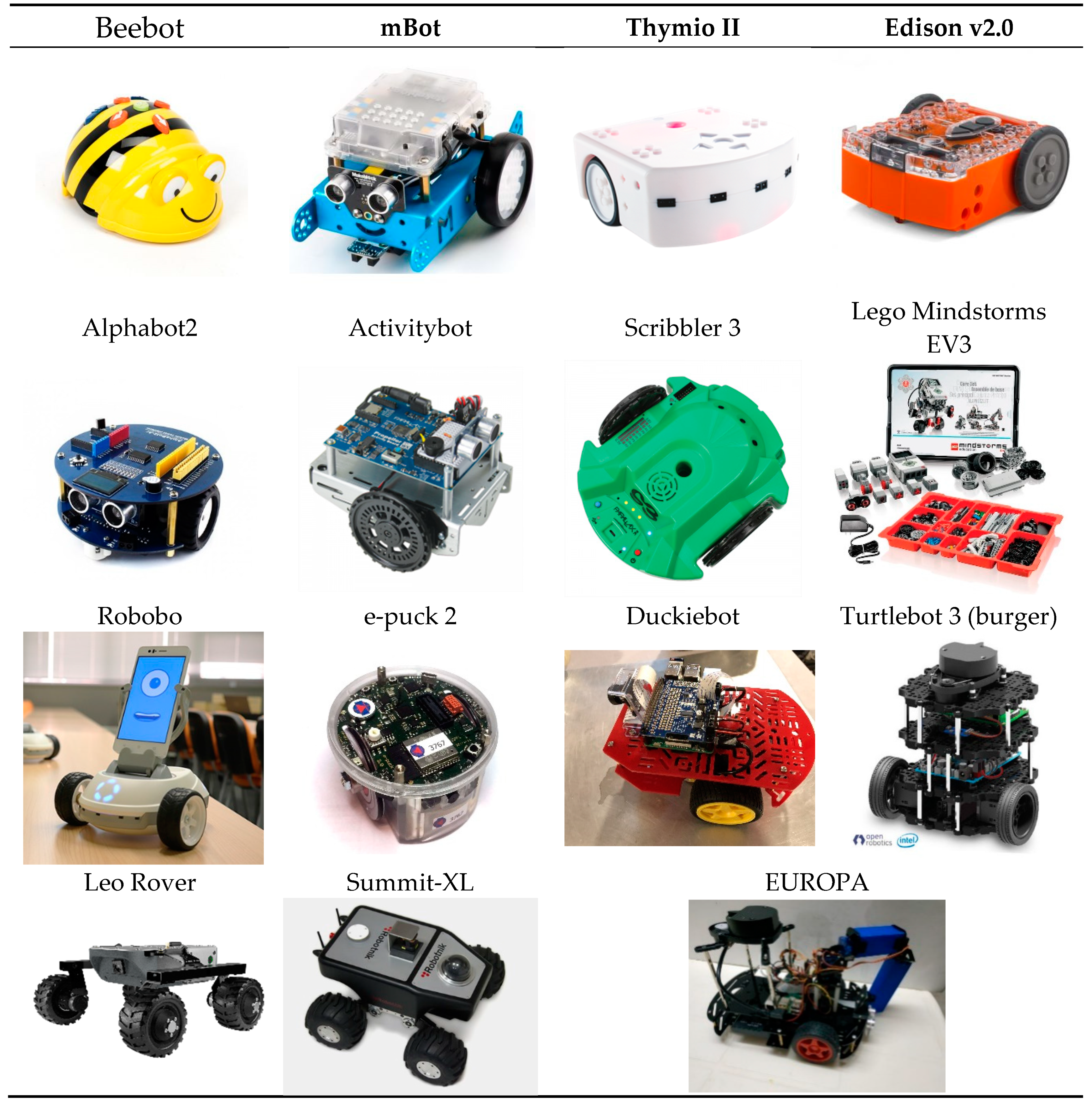
2. State-of-the-Art Educational Platforms
3. Materials and Methods: Presentation of the EUROPA Platform
3.1. Overview of EUROPA
3.2. EUROPA Hardware
3.3. EUROPA Software
3.3.1. Nodes that Run Exclusively on the Robot
- A custom Python node for DC motor control.
- A custom Python node for translating position information to appropriate command signals for the servo motors of the robotic arm.
- A node for streaming video from the camera.
- A node for the LIDAR operation which publishes data using ROS hls_lfcd_lds_driver
- driver [61].
- A custom Python node for publishing distance measurements collected from the distance sensor.
- A custom Python node for publishing odometry data from the wheel encoders.
3.3.2. Nodes that Run either on the Remote Computer or on the Robot itself (If It is Connected to a Screen and a Keyboard)
- A custom Python node for moving the robot using the keyboard.
- A custom Python node for the movement of the robotic arm.
- A custom node to watch the video captured by the robot camera
- A custom Python node to identify color lines and to send velocity messages that control the movement of the robot.
- A custom Python node for moving the robot to a specific position on the xy plane.
3.3.3. Nodes and Simulations that Run Exclusively on the Remote Computer
4. Results and Discussion: EUROPA in the Real World
4.1. Europa in Secondary Education
4.1.1. Robot Construction
4.1.2. Motors and Sensors
4.1.3. Robot Simulation
4.1.4. Writing Python Scripts for EUROPA (Part 1)
4.1.5. Writing Python Scripts for EUROPA (Part 2)
4.1.6. Data Acquisition from Wheel Encoders and Odometry Computation
4.1.7. Controlling the Robot Arm of EUROPA (Part 1)
4.1.8. Controlling the Robot Arm of EUROPA (Part 2)
4.2. Advanced Robotics Course with EUROPA
4.2.1. Tele-Operation of EUROPA Using the Camera
4.2.2. Line Following Using the Camera
4.2.3. Simultaneous Localization and Mapping
4.3. Performance Evaluation Experiments
4.3.1. Odometry Evaluation
4.3.2. Mapping
4.3.3. Line Following Performance
4.4. Assessment of EUROPA in the Classroom
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Papert, S. Mindstorms: Children, Computers, and Powerful Ideas; Basic Books: New York, NY, USA, 1980. [Google Scholar]
- Benitti, F.B.V. Exploring the educational potential of robotics in schools: A systematic review. Comput. Educ. 2012, 58, 978–988. [Google Scholar] [CrossRef]
- Benitti, F.B.V.; Spolaôr, N. How have robots supported STEM teaching? In Robotics in STEM Education; Khine, M.S., Ed.; Springer: Cham, Switzerland, 2017; pp. 103–129. [Google Scholar]
- Jeon, M.; Fakhrhosseini, M.; Barnes, J.; Duford, Z.; Zhang, R.; Ryan, J.; Vasey, E. Making live theatre with multiple robots as actors. In Proceedings of the 11th ACM/IEEE International Conference on Human-Robot Interaction (HRI 2016), Christchurch, New Zealand, 7–10 March 2016; pp. 445–446. [Google Scholar]
- Jeon, M.; Barnes, J.; Fakhrhosseini, M.; Vasey, E.; Duford, Z.; Zheng, Z.; Dare, E. Robot opera: A modularized afterschool program for STEAM education at local elementary school. In Proceedings of the 14th International Conference on Ubiquitous Robots and Ambient Intelligence (URAI 2017), Jehu, Korea, 28 June–1 July 2017; pp. 935–936. [Google Scholar]
- Zhang, Z.; Zhang, A.; Zhang, M.; Esche, S. Project-based Courses for B.Tech. Program of Robotics in Mechanical Engineering Technology. ASEE Comput. Educ. (CoED) J. 2020, 11, 1–10. [Google Scholar]
- Sullivan, A.; Bers, M.U. Robotics in the early childhood classroom: Learning outcomes from an 8-week robotics curriculum in pre-kindergarten through second grade. Int. J. Technol. Des. Educ. 2015, 26, 3–20. [Google Scholar] [CrossRef]
- Elkin, M.; Sullivan, A.; Bers, M.U. Programming with the KIBO robotics kit in preschool classrooms. Comput. Sch. 2016, 33, 169–186. [Google Scholar] [CrossRef]
- Huskens, B.; Palmen, A.; Van der Werff, M.; Lourens, T.; Barakova, E.I. Improving collaborative play between children with autism spectrum disorders and their siblings: The effectiveness of a robot-mediated intervention based on Lego® therapy. J. Autism Dev. Disord. 2015, 45, 3746–3755. [Google Scholar] [CrossRef] [PubMed]
- Lytridis, C.; Bazinas, C.; Papakostas, G.A.; Kaburlasos, V. On Measuring Engagement Level During Child-Robot Interaction in Education. In Advances in Intelligent Systems and Computing, Proceedings of the Robotics in Education (RiE 2019), Vienna, Austria, 10–12 April 2019; Springer: Cham, Switzerland, 2019; Volume 1023. [Google Scholar]
- Merdan, M.; Lepuschitz, W.; Koppensteiner, G.; Balogh, R.; Obdržálek, D. (Eds.) Advances in Intelligent Systems and Computing, Proceedings of Robotics in Education (RiE 2019), Vienna, Austria, 10–12 April 2019; Springer: Cham, Switzerland, 2020; Volume 1023. [Google Scholar]
- Alimisis, D.; Moro, M. (Eds.) Special Issue on Educational Robotics, Robotics and Autonomous Systems; Elsevier: New York, NY, USA, 2016; Volume 77, pp. 1–76. [Google Scholar]
- Paull, L.; Tani, J.; Ahn, H.; Alonso-Mora, J.; Carlone, L.; Cap, M.; Chen, Y.F.; Choi, C.; Dusek, J.; Fang, Y.; et al. Duckietown: An Open, Inexpensive and Flexible Platform for Autonomy Education and Research. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA 2017), Singapore, 29 May–3 June 2017; pp. 1497–1504. [Google Scholar]
- ROS Wiki, Turtlebot 3. Available online: https://wiki.ros.org/Robots/TurtleBot (accessed on 6 December 2019).
- Pedersen, B.K.M.K.; Larsen, J.C.; Nielsen, J. The Effect of Commercially Available Educational Robotics: A Systematic Review. In Advances in Intelligent Systems and Computing, Proceedings of Robotics in Education (RiE 2019), Vienna, Austria, 10–12 April 2019; Merdan, M., Lepuschitz, W., Koppensteiner, G., Balogh, R., Obdržálek, D., Eds.; Springer: Cham, Switzerland, 2020; Volume 1023, pp. 14–27. [Google Scholar]
- Piaget, J.; Inhelder, B. The Child’s Construction of Quantities; Routledge and Kegan Paul: London, UK, 1974. [Google Scholar]
- Papert, S. The Children’s Machine—Rethinking School in the Age of the Computer; Basic Books: New York, NY, USA, 1993; ISBN 13: 978-0465010639. [Google Scholar]
- Karim, M.E.; Lemaignan, S.; Mondada, F. A review: Can robots reshape K-12 STEM education? In Proceedings of the IEEE International Workshop on Advanced Robotics and its Social Impacts, Lyon, France, 1–3 July 2015; pp. 1–8. [Google Scholar]
- Kushner, D. The Making of Arduino. Available online: http://spectrum.ieee.org/geek-life/hands-on/the-making-of-arduino (accessed on 6 December 2019).
- Arduino Web Site. Available online: https://www.arduino.cc/ (accessed on 6 December 2019).
- Raspberry Foundation Web Page. Available online: https://www.raspberrypi.org/ (accessed on 6 December 2019).
- Quigley, M.; Conley, K.; Gerkey, B.; Faust, J.; Foote, T.B.; Leibs, J.; Wheeler, R.; Ng, A.Y. ROS: An open-source robot operating system. In ICRA Open-Source Software Workshop; ICRA: Kobe, Japan, 2009. [Google Scholar]
- Gazebo Simulator Web Page. Available online: http://gazebosim.org/ (accessed on 6 December 2019).
- Rqt rviz, Package Summary. Available online: http://wiki.ros.org/rqt_rviz (accessed on 6 December 2019).
- Rviz—3D Visualization Tool for ROS. Available online: http://wiki.ros.org/rviz (accessed on 6 December 2019).
- Roussou, E.; Rangoussi, M. On the Use of Robotics for the Development of Computational Thinking in Kindergarten: Educational Intervention and Evaluation. In Robotics in Education, RiE 2019. Advances in Intelligent Systems and Computing; Merdan, M., Lepuschitz, W., Koppensteiner, G., Balogh, R., Obdržálek, D., Eds.; Springer: Cham, Switzerland, 2020; Volume 1023, pp. 31–44. [Google Scholar]
- Highfield, K. Robotic toys as a catalyst for mathematical problem solving. Aust. Primary Math. Classroom 2010, 15, 22–27. [Google Scholar]
- Thymio II Web. Available online: https://www.thymio.org/home-en:home (accessed on 6 December 2019).
- Mondada, F.; Bonani, M.; Riedo, F.; Briod, M.; Pereyre, L.; Retornaz, P.; Magnenat, S. The Thymio open-source hardware robot. IEEE Robot. Autom. Mag. 2017, 1070, 77–85. [Google Scholar] [CrossRef] [Green Version]
- Parallax Web Page. Available online: https://www.parallax.com (accessed on 6 December 2019).
- Souza, I.; Andrade, W.; Sampaio, L.; Araújo, A.L.; Araujo, S. A Systematic Review on the use of LEGO® Robotics in Education. 2018. Available online: https://www.researchgate.net/publication/328410916 (accessed on 6 December 2019).
- Lego Web Page. Available online: https://www.lego.com (accessed on 6 December 2019).
- Casini, M.; Garulli, A.; Giannitrapani, A.; Vicino, A. A Remote Lab for Experiments with a Team of Mobile Robots. Sensors 2014, 14, 16486–16507. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Mondada, F.; Bonani, M.; Raemy, X.; Pugh, J.; Cianci, C.; Klaptocz, A.; Magnenat, S.; Zufferey, J.-C.; Floreano, D.; Martinoli, A. The e-puck, a Robot Designed for Education in Engineering. In Proceedings of the 9th Conference on Autonomous Robot Systems and Competitions, Castelo Branco, Portugal, 7 May 2009; Volume 1, pp. 59–65. [Google Scholar]
- Turtle-bot Web Page. Available online: http://www.robotis.us/turtlebot/ (accessed on 6 December 2019).
- Duckietown Web Page. Available online: https://www.duckietown.org/ (accessed on 6 December 2019).
- Navaro, P.J.; Fernandez, C.; Sanchez, P. Industrial-like Vehicle Platforms for Postgraduate Laboratory Courses on Robotics. IEEE Trans. Educ. 2013, 56, 34–41. [Google Scholar] [CrossRef] [Green Version]
- Leo Web Page. Available online: https://www.leorover.tech/ (accessed on 6 December 2019).
- Robotnik Web Page. Available online: https://www.robotnik.eu/mobile-robots/summit-xl-hl/ (accessed on 6 December 2019).
- Clearpath Web Page. Available online: https://clearpathrobotics.com/robots/ (accessed on 6 December 2019).
- SoftBank Web Page. Available online: https://www.softbankrobotics.com/emea/index.php/en/nao (accessed on 6 December 2019).
- Humanizing Technologies Web Page. Available online: https://www.humanizing.com/our-robots/ (accessed on 6 December 2019).
- Robotis OP3 Web Page. Available online: http://www.robotis.us/robotis-OP2-OP3/ (accessed on 6 December 2019).
- Makeblock Mbot Web Page. Available online: https://www.makeblock.com/steam-kits/mbot (accessed on 6 December 2019).
- Magnenat, S.; Mondada, F. ASEBA Meets D-Bus: From the Depths of a Low-Level Event-Based Architecture into the Middleware Realm. In Proceedings of the IEEE TC-Soft Workshop on Event-based Systems in Robotics (EBS-RO), St. Louis, MO, USA, 15 October 2009. [Google Scholar]
- Edison Web. Available online: https://meetedison.com/ (accessed on 6 December 2019).
- Waveshare Web. Available online: https://www.waveshare.com/wiki/AlphaBot2 (accessed on 6 December 2019).
- Bellas, F.; Mallo, A.; Naya, M.; Souto, D.; Deibe, A.; Prieto, A.; Duro, R.J. STEAM Approach to Autonomous Robotics Curriculum for High School Using the Robobo Robot. In Robotics in Education, RiE 2019. Advances in Intelligent Systems and Computing; Merdan, M., Lepuschitz, W., Koppensteiner, G., et al., Eds.; Springer: Cham, Switzerland, 2020; Volume 1023, pp. 77–89. [Google Scholar]
- Naya, M.; Varela, G.; Llamas, L.; Bautista, M.; Becerra, J.C.; Bellas, F.; Prieto, A.; Deibe, A.; Duro, R. A Versatile Robotic Platform for Educational Interaction. In Proceedings of the 9th International Conference on Intelligent Data Acquisition and Advanced Computing Systems: Technology and Applications, Bucharest, Romania, 21–13 September 2017. [Google Scholar]
- Robobo Web Page. Available online: https://theroboboproject.com/en/ (accessed on 6 December 2019).
- Karalekas, G.; Vologiannidis, S.; Kalomiros, J. EUROPA—A ROS-based Open Platform for Educational Robotics. In Proceedings of the 10th IEEE International Conference on Intelligent Data Acquisition and Advanced Computing Systems: Technology and Applications, Metz, France, 18–21 September 2019. [Google Scholar]
- Amsters, R.; Slaets, P. Turtlebot 3 as a Robotics Education Platform. In Robotics in Education, RiE 2019. Advances in Intelligent Systems and Computing; Merdan, M., Lepuschitz, W., Koppensteiner, G., Balogh, R., Obdržálek, D., Eds.; Springer: Cham, Switzerland, 2020; Volume 1023, pp. 170–181. [Google Scholar]
- Vex Robotics Web Page. Available online: https://www.vexrobotics.com/ (accessed on 6 December 2019).
- Pitsco/Tetrix Robotics Web Page. Available online: https://www.pitsco.com/Shop/TETRIX-Robotics (accessed on 6 December 2019).
- Motor Driver Web Page and Datasheet. Available online: http://www.ti.com/lit/ds/symlink/drv8833.pdf (accessed on 6 December 2019).
- Raspberry Pi Camera User Manual. Available online: https://www.waveshare.com/w/upload/6/61/RPi-Camera-User-Manual.pdf (accessed on 6 December 2019).
- LDS-01 Web Page. Available online: http://www.robotis.us/360-laser-distance-sensor-lds-01-lidar/ (accessed on 6 December 2019).
- Photo-Interrupter Sensor Wiki. Available online: https://www.waveshare.com/wiki/Photo_Interrupter_Sensor (accessed on 6 December 2019).
- Ultrasonic Ranging Module HC-SR04. Available online: https://cdn.sparkfun.com/datasheets/Sensors/Proximity/HCSR04.pdf (accessed on 6 December 2019).
- ROS Node for Camera Module of Raspberry Pi. Available online: https://github.com/UbiquityRobotics/raspicam_node (accessed on 6 December 2019).
- ROS Wiki Web Page, LDS Driver. Available online: http://wiki.ros.org/hls_lfcd_lds_driver (accessed on 6 December 2019).
- ROS Wiki Web Page, Keyboard Teleoperation Package Summary. Available online: http://wiki.ros.org/teleop_twist_keyboard (accessed on 6 December 2019).
- Fernandez-Madrigal, J.-A.; Claraco, J.L. Simultaneous Localization and Mapping for Mobile Robots: Introduction and Methods; IGI Global: Hershey, PA, USA, 2013; ISBN 13: 978-1466621046. [Google Scholar]
- Sucan, I.A.; Chitta, S.M. Available online: http://moveit.ros.org (accessed on 6 December 2019).
- ROS Wiki, Hector Slam Documentation. Available online: http://wiki.ros.org/hector_slam (accessed on 6 December 2019).
- Kohlbrecher, S.; Meyer, J.; von Stryk, O.; Klingauf, U. A Flexible and Scalable SLAM System with Full 3D Motion Estimation. In Proceedings of the IEEE International Symposium on Safety, Security and Rescue Robotics (SSRR), Kyoto, Japan, 1–5 November 2011. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Bot Name | Level of Education | Appro-ximate Cost (€) | Open Source HW/SW | Sensors | Actuators/ Kinematic Model | ROS | Controller/CPU | Programming Tools | Data Communication | Ref |
|---|---|---|---|---|---|---|---|---|---|---|
| Bee-bot /Colby | Kindergarten/Elementary | 65 | NO/NO | Bs | ?/DD | NO | ? | Buttons | NO | [26,27] |
| mBot | Elementary/ secondary | 120 | NO/YES | B, UDS, LF, LS, IR | DC gear motor plastic, RGB LEDs, buzzer/DD | NO | ATmega328/ motor driver | Block-based/ Arduino IDE | BT | [44] |
| Thymio II | Elementary/ secondary | 170 | YES/YES | Bs, IR, LF, Th, Acc, Mic | DC gear motor plastic, LEDs, Loud speaker/ DD | NO | PIC24FJ128GB/ motor driver | Block/Visual /text based (Aseba) | 2.4 GHz, protocol 802.15.4 | [28,29] |
| Edison | Elementary/ secondary | 60 | NO/NO | Bs, IR, LS, LF, Mic, OE | DC gear motor, LEDs, buzzer/DD | NO | Freescale 8-bit MC9S08PA16 | Block-based/ Scratch/EdPy | IR | [46] |
| Scribbler 3 | Elementary/ secondary | 200 | NO/NO | LS, LF, IR, OE | DC gear motor, LEDs/DD | NO | Propeller P8X32A | Block-based programming | USB | [30] |
| LEGO EV3 | secondary | 500 | NO/NO | TS, CS, GS, UDS | Compact Gear motors/DD | NO | ARM9 | EV3 icon-based software | BT, Wi-Fi | [32] |
| AlphaBot2 | secondary | 90–125 | YES/YES | UDS, IR, LF, Camera* | N20 micro gear motor, RGB LEDs/DD | NO | Arduino or Raspberry Pi zero or BBC micro:bit | Arduino IDE or Python | BT, IR | [47] |
| ActivityBot | secondary | 200 | NO/NO | UDS, LS, TS, IR, OE | High speed 360o servos/DD | NO | Propeller P8X32A | Block-based graphical/C | USB | [30] |
| Epuck 2 | Secondary/ higher | 1200 | YES/YES | IR, acc, gyro, mic, camera, ToF | Stepper motors, LEDs, Loud-seaker/DD | YES | STM32F4 ARM Cortex M4 | Free C compiler | BT | [33,34] |
| Robobo | Secondary/ higher | 450 | NO/YES | Camera, acc, gyro, GPS, magn, IR, LS | DC gear motor, LEDs/DD | YES | Smartphone + PIC32 (low-level control) | Scratch/ Python/ ROS | Wi-Fi | [48,49,50] |
| EUROPA II | Secondary/ higher | 120 or 300** | YES/YES | UDS, IR, OE, Camera, LIDAR** | DC gear motor, robotic arm, LEDs/DD | YES | Raspberry Pi | Python/ROS/ OpenCV | Wi-Fi | [51] |
| Turtlebot 3 (burger) | higher | 800 | YES/YES | Camera, LIDAR, acc, gyro, magn | DYNAMIXEL AX gear motor + driver/DD | YES | Raspberry Pi + OpenCR | Block-based/ ROS/Python | Wi-Fi | [35,52] |
| Duckiebot | higher | 150 | YES/YES | Fish-eye camera for Raspberry Pi | DC gear motor/DD | YES | Raspberry Pi 2 | ROS programming in C/Python | Wi-Fi | [13,36] |
| Leo Rover | Research/ industry | 2500 | YES/YES | Fish-eye camera, wheel encoders | 4x DC gear motor | YES | Raspberry Pi + Core2 ROS (low level) | ROS Programming | Wi-Fi | [38] |
| Summit-XL | Industry | 15000 | YES/YES | 3D camera, Laser scanner + optional sensors | 4x DC gear motor/skid steering | YES | Intel processor/PC | ROS Programming | Wi-Fi | [39] |
| Part | Number | Cost in Euros |
|---|---|---|
| Raspberry 3 B+ board | 1 | 41.90 |
| Motor controller shield DRV8833 | 1 | 5.20 |
| Raspberry Pi camera | 1 | 21.20 |
| Servo motors Feetech FS90 | 3 | 3 × 2.5 = 7.50 |
| Led photodiode encoders | 2 | 2 × 3.90 = 7.80 |
| Ultrasonic sensor | 1 | 2.50 |
| DC motors with encoder disks | 2 | 2 × 1.8 = 3.60 |
| Plexiglas double base | 1 | 1.80 |
| Caster ball | 1 | 1.60 |
| Rechargeable battery | 1 | 9.90 |
| Wheels | 2 | 2 × 1.5 = 3.00 |
| Cables | 4.00 | |
| Lidar | 1 | 180.9 |
| mini pan tilt kits | 2 | 2 × 2.9 |
| robotic arm axles (3d printed) | 2 | 0.5 |
| Spacers, bolts, nuts | 2.0 | |
| Total Cost | 299.2 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Karalekas, G.; Vologiannidis, S.; Kalomiros, J. EUROPA: A Case Study for Teaching Sensors, Data Acquisition and Robotics via a ROS-Based Educational Robot. Sensors 2020, 20, 2469. https://doi.org/10.3390/s20092469
Karalekas G, Vologiannidis S, Kalomiros J. EUROPA: A Case Study for Teaching Sensors, Data Acquisition and Robotics via a ROS-Based Educational Robot. Sensors. 2020; 20(9):2469. https://doi.org/10.3390/s20092469
Chicago/Turabian StyleKaralekas, Georgios, Stavros Vologiannidis, and John Kalomiros. 2020. "EUROPA: A Case Study for Teaching Sensors, Data Acquisition and Robotics via a ROS-Based Educational Robot" Sensors 20, no. 9: 2469. https://doi.org/10.3390/s20092469
APA StyleKaralekas, G., Vologiannidis, S., & Kalomiros, J. (2020). EUROPA: A Case Study for Teaching Sensors, Data Acquisition and Robotics via a ROS-Based Educational Robot. Sensors, 20(9), 2469. https://doi.org/10.3390/s20092469