Characteristics of Very Low Frequency Sound Propagation in Full Waveguides of Shallow Water

 , ,
, , {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Theoretical Model
2.1. Finite Element Form of Acoustic Field in Shallow Water
2.2. Acoustic Energy Flux in Full Waveguide of Shallow Water
3. Simulation and Discussion
3.1. Comparison of Simulation Results
3.2. The Effects of Sea Bottom Topography on the Characteristics of VLF Sound Propagation
3.2.1. VLF Sound Propagation in Shallow Water with Wedge-Shaped Uphill Sea Bottom
3.2.2. VLF Sound Propagation in Shallow Water with Wedge-shaped Downhill Sea Bottom
3.3. The Effects of Geoacoustic Parameters on the Characteristics of VLF Sound Propagation
3.3.1. Effect of the Density of the Sea Bottom on the Characteristics of VLF Sound Propagation
3.3.2. Effect of the P-Wave Speed in the Sea Bottom on the Characteristics of VLF Sound Propagation
3.3.3. Effect of S-Wave Speed in the Sea Bottom on the Characteristics of VLF Sound Propagation
4. Conclusions
- (1)
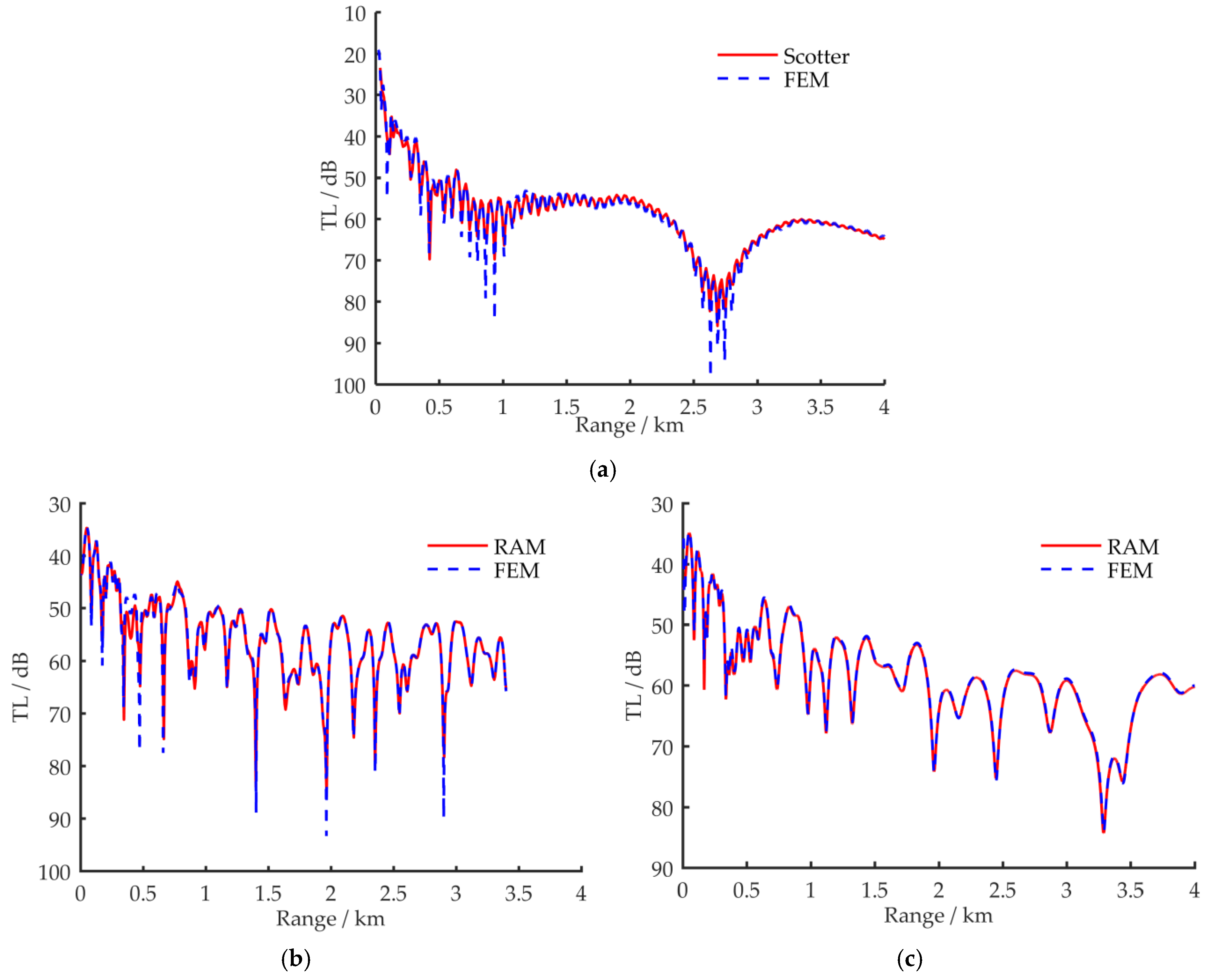
- According to the simulation results, FEM is highly applicable for the calculation of sound propagation in complex sea environments, especially for sound propagation in range-dependent full shallow water waveguides. Our results indicate that the underwater acoustic field prediction simulated by FEM is consistent with the predictions obtained by other shallow water simulation methods.
- (2)
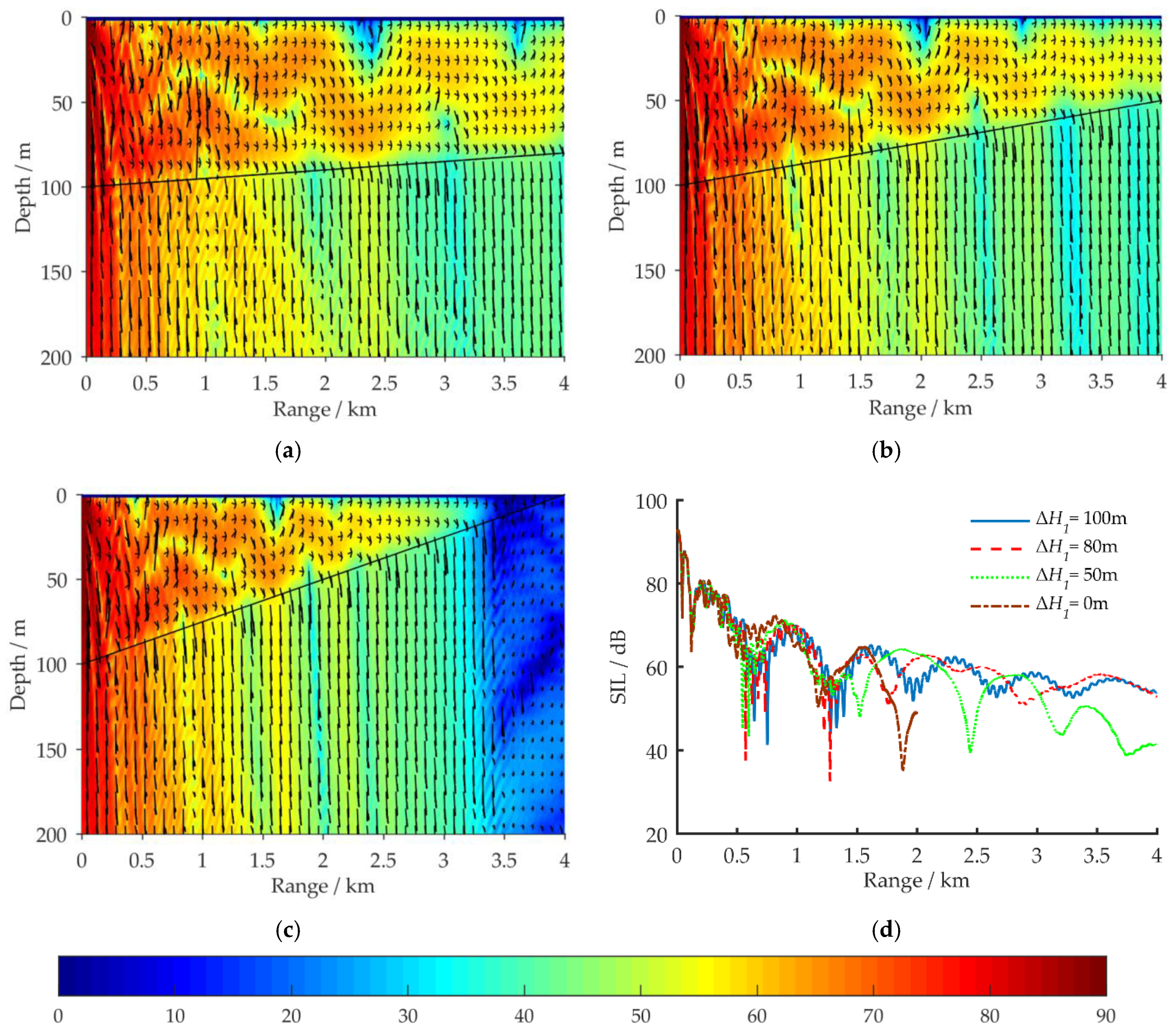
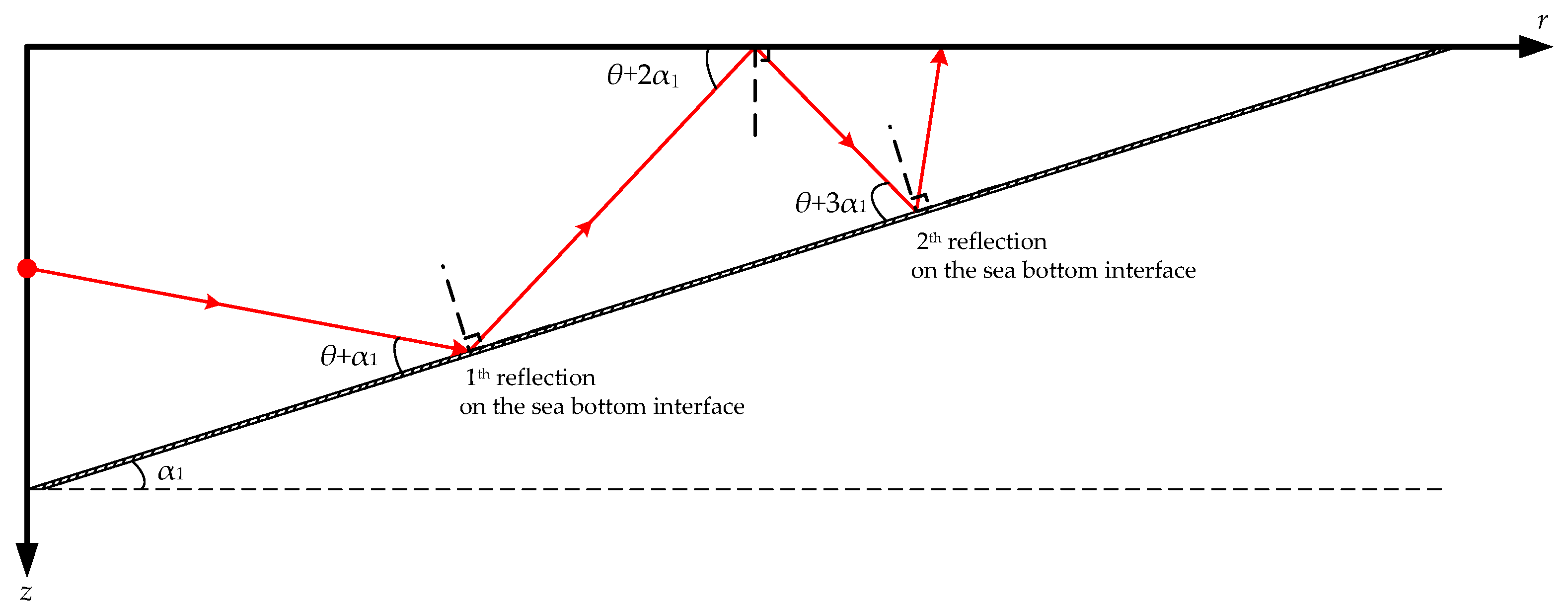
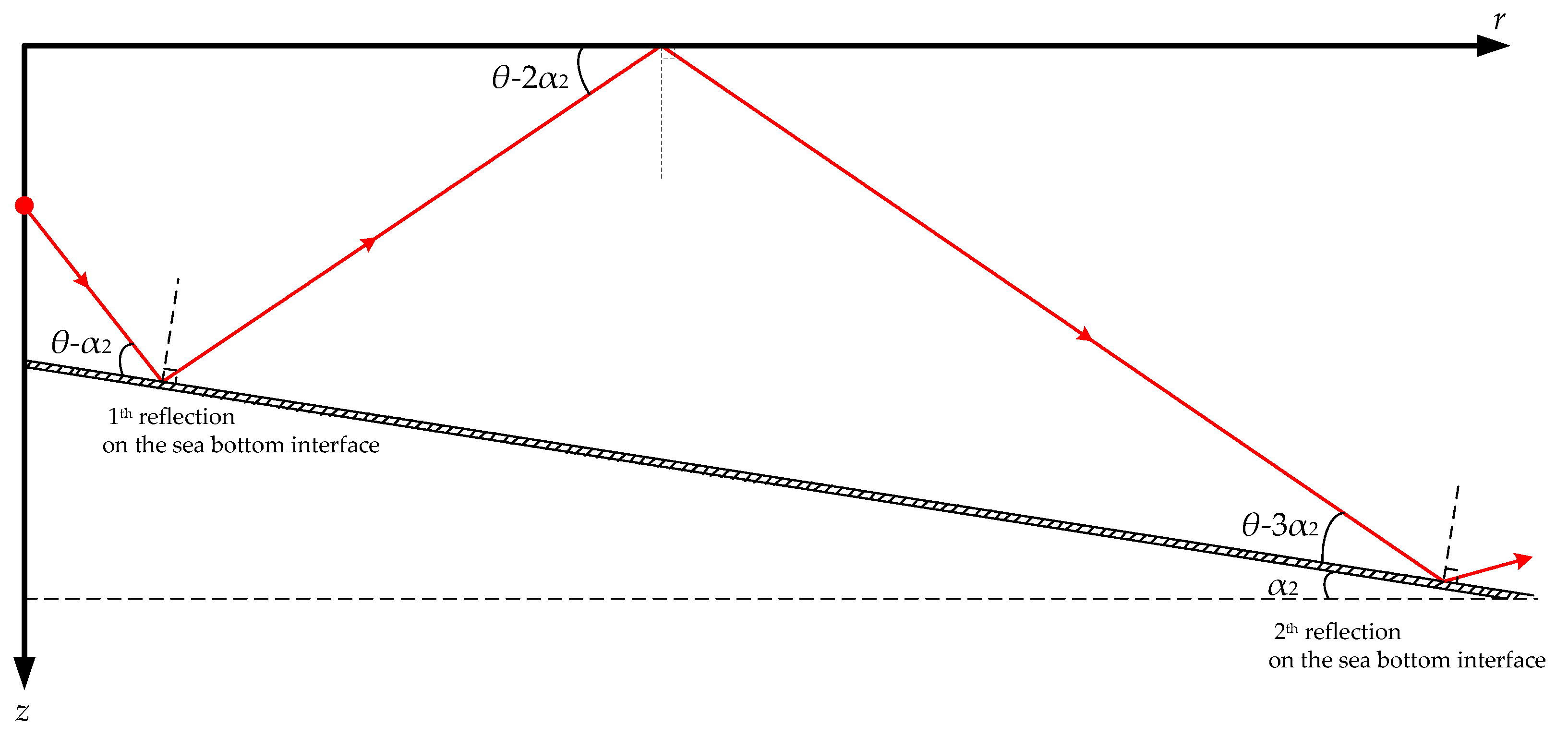
- Both wedge-shaped uphill and downhill sea bottoms can significantly influence VLF sound propagation in shallow water. Compared with a horizontal sea bottom, under the influence of the uphill slope angle α1, the low-order normal modes, which correspond to small grazing angles, are continuously coupled to the high-order normal modes, which correspond to large grazing angles, significantly strengthening the leakage effect of the acoustic energy to the sea bottom and relieving the fluctuation. The larger the slope angle α1 is, the more the low-order normal modes are coupled to the higher order ones, the more the acoustic energy leaks into the sea bottom, the faster the acoustic energy attenuates in the sea water, the fewer the normal mode orders, and the simpler the normal mode interference in far-field regions. The influence of a wedge-shaped downhill sea bottom is exactly the opposite. Under the influence of the downhill slope angleα2, the high-order normal modes are continuously coupled to the low-order normal modes, and the leakage effect of the acoustic energy to the sea bottom is significantly weakened.
- (3)
- By considering the sea bottom as an elastic medium, the effects of geoacoustic parameters of the sea bottom, namely, the P-wave speed cp, S-wave speed cs, and density ρb, on VLF sound propagation in a full waveguide can be analyzed based on the reflection rules of the fluid/elastic interface. Under the condition cp > c1 > cs, as cp increases, the critical incidence angle on the fluid/sediment interface and the fluctuation cycle of the acoustic energy decrease, while the acoustic energy is more confined to propagating in the fluid layer. However, the effects of cs and ρb are the opposite: increasing cs or ρb causes more acoustic energy to be carried into the sea bottom, thereby increasing the attenuation rate of the acoustic energy in the fluid layer.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Seo, I.; Kim, S.; Ryu, Y.; Park, J.; Han, D.S. Underwater Moving Target Classification Using Multilayer Processing of Active Sonar System. Appl. Sci. 2019, 9, 4617. [Google Scholar] [CrossRef] [Green Version]
- Zhang, C.; Li, S.; Shang, D.-J.; Han, Y.; Shang, Y. Prediction of Sound Radiation from Submerged Cylindrical Shell Based on Dominant Modes. Appl. Sci. 2020, 10, 3073. [Google Scholar] [CrossRef]
- Zhang, C.; Liu, Y.; Shang, D.-J.; Khan, I.U. A Method for Predicting Radiated Acoustic Field in Shallow Sea Based on Wave Superposition and Ray. Appl. Sci. 2020, 10, 917. [Google Scholar] [CrossRef] [Green Version]
- Wang, X.; Khazaie, S.; Margheri, L.; Sagaut, P. Shallow water sound source localization using the iterative beamforming method in an image framework. J. Sound Vib. 2017, 395, 354–370. [Google Scholar] [CrossRef]
- Jixing, Q.; Wenyu, L.; Renhe, Z.; Chunmei, Y. Analysis and comparison between two coupled-mode methods for acoustic propagation in range-dependent waveguides. Chin. J. Acust. 2014, 1, 1–21. [Google Scholar] [CrossRef]
- Yu, S.; Liu, B.; Yang, Z.; Kan, G. A backscattering model for a stratified seafloor. Acta Oceanol. Sin. 2017, 36, 56–65. [Google Scholar] [CrossRef]
- Yu, S.; Liu, B.; Yu, K.; Yang, Z.; Kan, G.; Feng, Z.; Le, Z. Measurements of Midfrequency Acoustic Backscattering From a Sandy Bottom in the South Yellow Sea of China. IEEE J. Ocean. Eng. 2017, 43, 1179–1186. [Google Scholar] [CrossRef]
- Scholte, J.G. The Range of Existence of Rayleigh and Stoneley Waves. Geophys. J. Int. 1947, 5, 120–126. [Google Scholar] [CrossRef] [Green Version]
- Kugler, S.; Bohlen, T.; Forbriger, T.; Bussat, S.; Klein, G. Scholte-wave tomography for shallow-water marine sediments. Geophys. J. Int. 2007, 168, 551–570. [Google Scholar] [CrossRef] [Green Version]
- Hanhao, Z.; Hong, Z.; Jianmin, L.; Yunfeng, T.; Lingming, K. Influence of Ocean Environment Parameters on Scholte Wave. J. Shanghai Jiao Tong Univ. 2016, 50, 257–264. [Google Scholar] [CrossRef]
- Lu, Z.H.; Zhang, Z.H.; Gu, J.N. A detecting test of seismic waves caused by random ships in shallow water with sandy bottom. Acta Armam. 2016, 37, 482–488. [Google Scholar] [CrossRef]
- Li, C.L.; Dosso, S.E.; Dong, H.F. Interface-wave dispersion curves inversion based on nonlinear Bayesian theory. Acta Acust. 2012, 37, 225–231. [Google Scholar] [CrossRef]
- Cuilin, L.; Shuye, J.; Shiguo, W.; Jin, Q. The interface wave simulation and its application in the shallow seabed structures. Prog. Geo. 2013, 28, 3287–3292. [Google Scholar]
- Brekhovskikh, L.M.; Lysanov, Y.P. Fundamentals of Ocean Acoustics; Springer: New York, NY, USA, 2003; pp. 61–78. ISBN 978-0-387-95467-7. [Google Scholar]
- Li, F.; Guo, X.; Zhang, Y.; Hu, T. Development and applications of underwater acoustic propagation. Physics 2014, 43, 658–666. [Google Scholar] [CrossRef]
- Zampolli, M.; Tesei, A.; Jensen, F.B.; Malm, N.; Blottman, J.B. A computationally efficient finite element model with perfectly matched layers applied to scattering from axially symmetric objects. J. Acoust. Soc. Am. 2007, 122, 1472–1485. [Google Scholar] [CrossRef] [PubMed]
- Jensen, F.B.; Kuperman, W.A.; Porter, M.B.; Schmidt, H. Computational Ocean Acoustics, 2nd ed.; Springer Science & Business Media: New York, NY, USA, 2011; pp. 531–610. ISBN 978-1-4419-8677-1. [Google Scholar]
- Shang, D.J.; Qian, Z.-W.; He, Y.-A.; Xiao, Y. Sound radiation of cylinder in shallow water investigated by combined wave superposition method. Acta Phys. Sin. 2018, 67, 084301. [Google Scholar] [CrossRef]
- Mann, J.A.; Tichý, J. Acoustic intensity analysis: Distinguishing energy propagation and wave-front propagation. J. Acoust. Soc. Am. 1991, 90, 20. [Google Scholar] [CrossRef]
- Hanhao, Z.; Guangxue, Z.; Haigang, Z.; Hong, Z.; Jianmin, L.; Yunfeng, T. Study on propagation characteristics of low frequency acoustic signal in shallow water environment. J. Shanghai Jiao Tong Univ. 2017, 51, 1464–1472. [Google Scholar] [CrossRef]
- He, Z.Y.; Zhao, Y.F. Acoustic Theory Basis; National Defense Industry Press: Beijing, China, 1981; pp. 49–59. [Google Scholar]
- Mo, Y.X.; Piao, S.C.; Zhang, H.G.; Li, L. An energy-conserving two-way coupled mode model for underwater acoustics propagation. Acta Acust. 2016, 41, 154–162. [Google Scholar] [CrossRef]
- Goh, J.T.; Schmidt, H.; Gerstoft, P.; Seone, W. Benchmarks for validating range-dependent seismo-acoustic propagation codes. IEEE J. Ocean. Eng. 1997, 22, 226–236. [Google Scholar] [CrossRef]
- Murphy, J.E.; Chinbing, S.A. A finite-element model for ocean acoustic propagation and scattering. J. Acoust. Soc. Am. 1989, 86, 1478–1483. [Google Scholar] [CrossRef]
- Zheng, G.; Zhu, H.; Wang, X.; Khan, S.; Li, N.; Xue, Y. Bayesian Inversion for Geoacoustic Parameters in Shallow Sea. Sensors 2020, 20, 2150. [Google Scholar] [CrossRef] [PubMed]
- Porter, M.B. Acoustic Toolbox. 2005. Available online: http://www.hlsresearch.com/oalib/Modes/AcousticsToolbox/ (accessed on 4 September 2020).
- Tang, J.; Petrov, P.S.; Piao, S.; Kozitskiy, S.B. On the Method of Source Images for the Wedge Problem Solution in Ocean Acoustics: Some Corrections and Appendices. Acoust. Phys. 2018, 64, 225–236. [Google Scholar] [CrossRef]
- Stoll, R.D.; Kan, T.-K. Reflection of acoustic waves at a water–sediment interface. J. Acoust. Soc. Am. 1981, 70, 149–156. [Google Scholar] [CrossRef]














Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, N.; Zhu, H.; Wang, X.; Xiao, R.; Xue, Y.; Zheng, G. Characteristics of Very Low Frequency Sound Propagation in Full Waveguides of Shallow Water. Sensors 2021, 21, 192. https://doi.org/10.3390/s21010192
Li N, Zhu H, Wang X, Xiao R, Xue Y, Zheng G. Characteristics of Very Low Frequency Sound Propagation in Full Waveguides of Shallow Water. Sensors. 2021; 21(1):192. https://doi.org/10.3390/s21010192
Chicago/Turabian StyleLi, Nansong, Hanhao Zhu, Xiaohan Wang, Rui Xiao, Yangyang Xue, and Guangxue Zheng. 2021. "Characteristics of Very Low Frequency Sound Propagation in Full Waveguides of Shallow Water" Sensors 21, no. 1: 192. https://doi.org/10.3390/s21010192
APA StyleLi, N., Zhu, H., Wang, X., Xiao, R., Xue, Y., & Zheng, G. (2021). Characteristics of Very Low Frequency Sound Propagation in Full Waveguides of Shallow Water. Sensors, 21(1), 192. https://doi.org/10.3390/s21010192