
Piston Error Measurement for Segmented Telescopes with an Artificial Neural Network

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Theoretical Relation between the Piston Error and Amplitudes of MTF Sidelobes
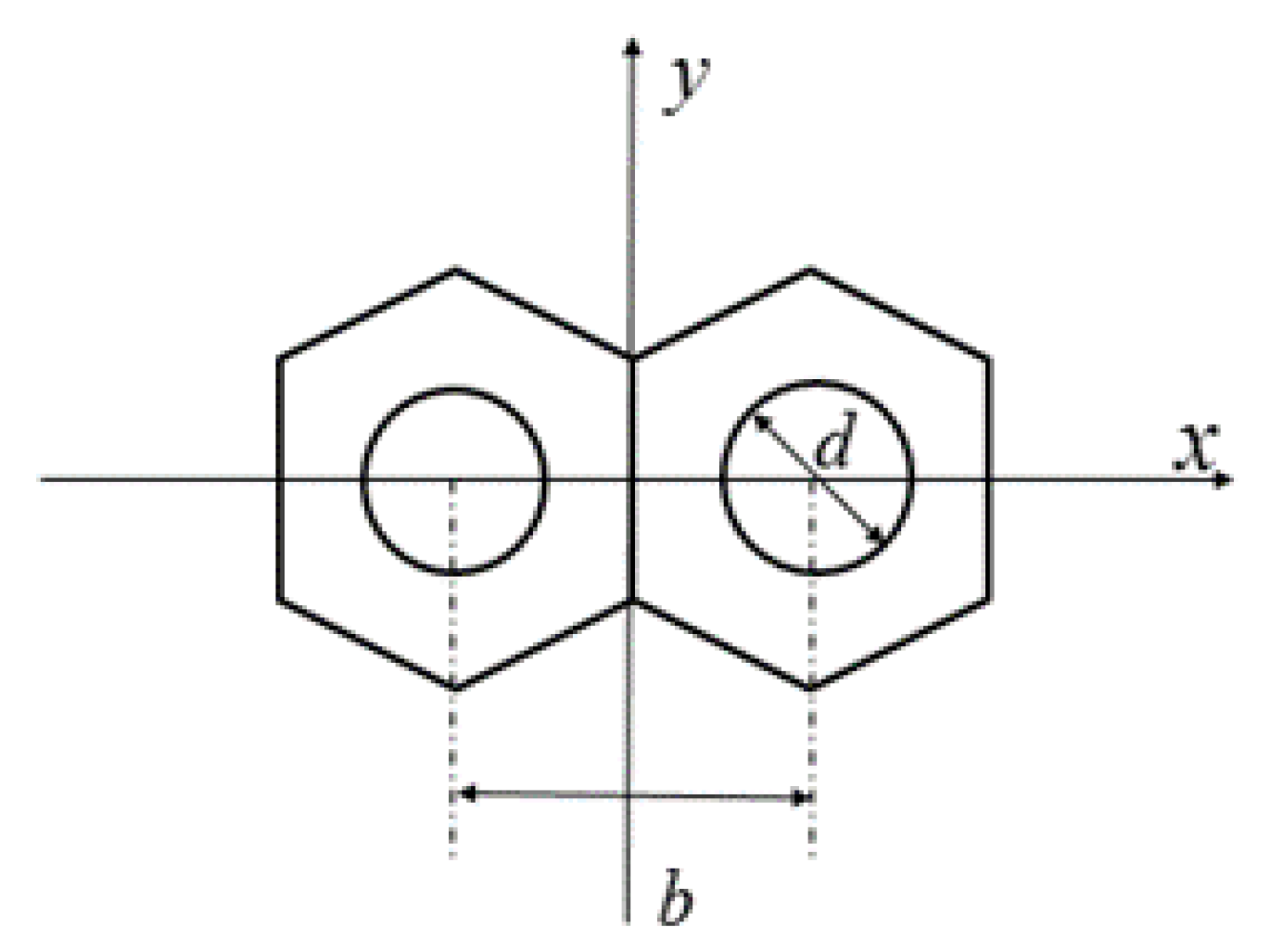
2.1. Establishing the Theoretical Relationship Based on Fourier Optics Principle
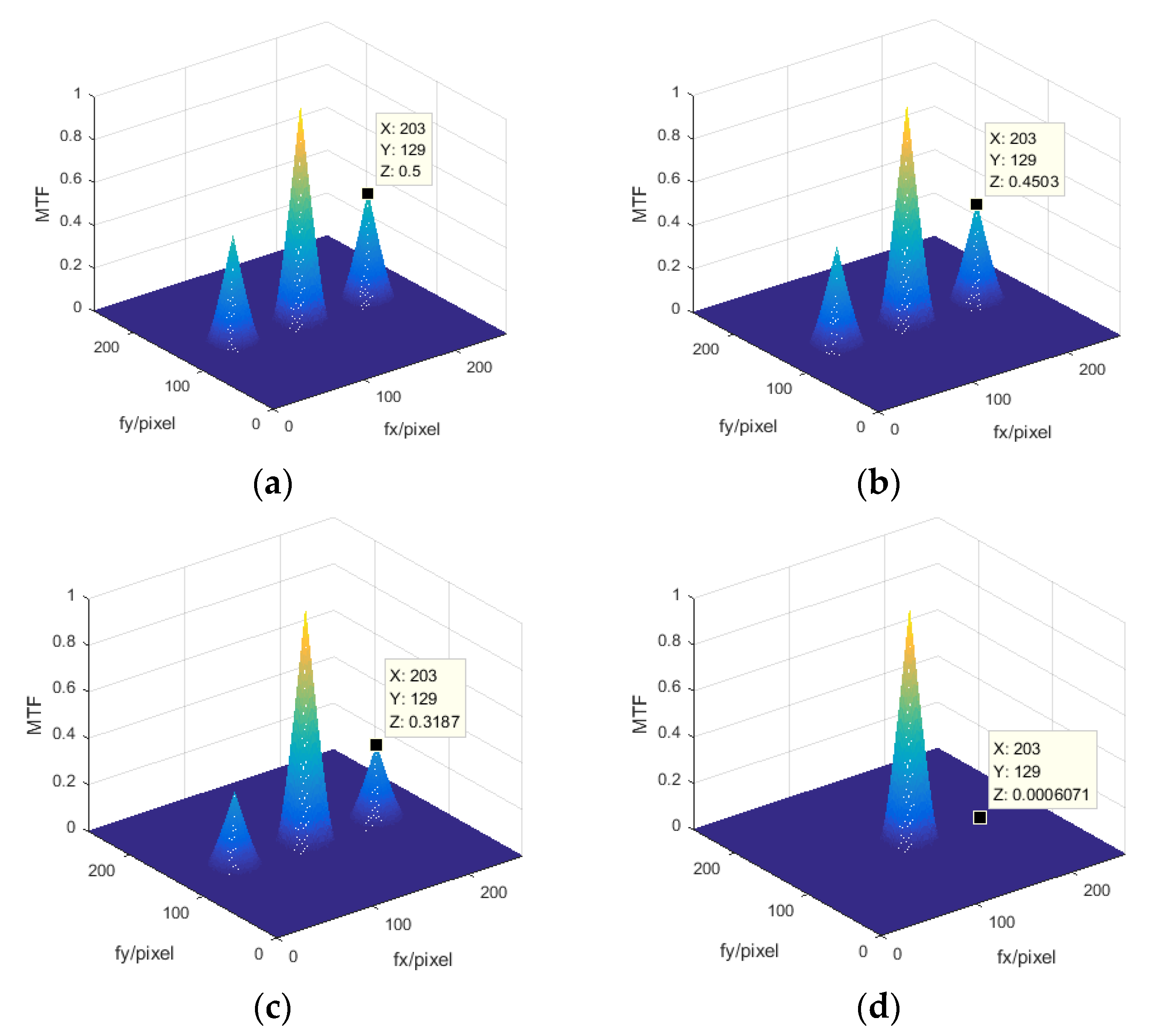
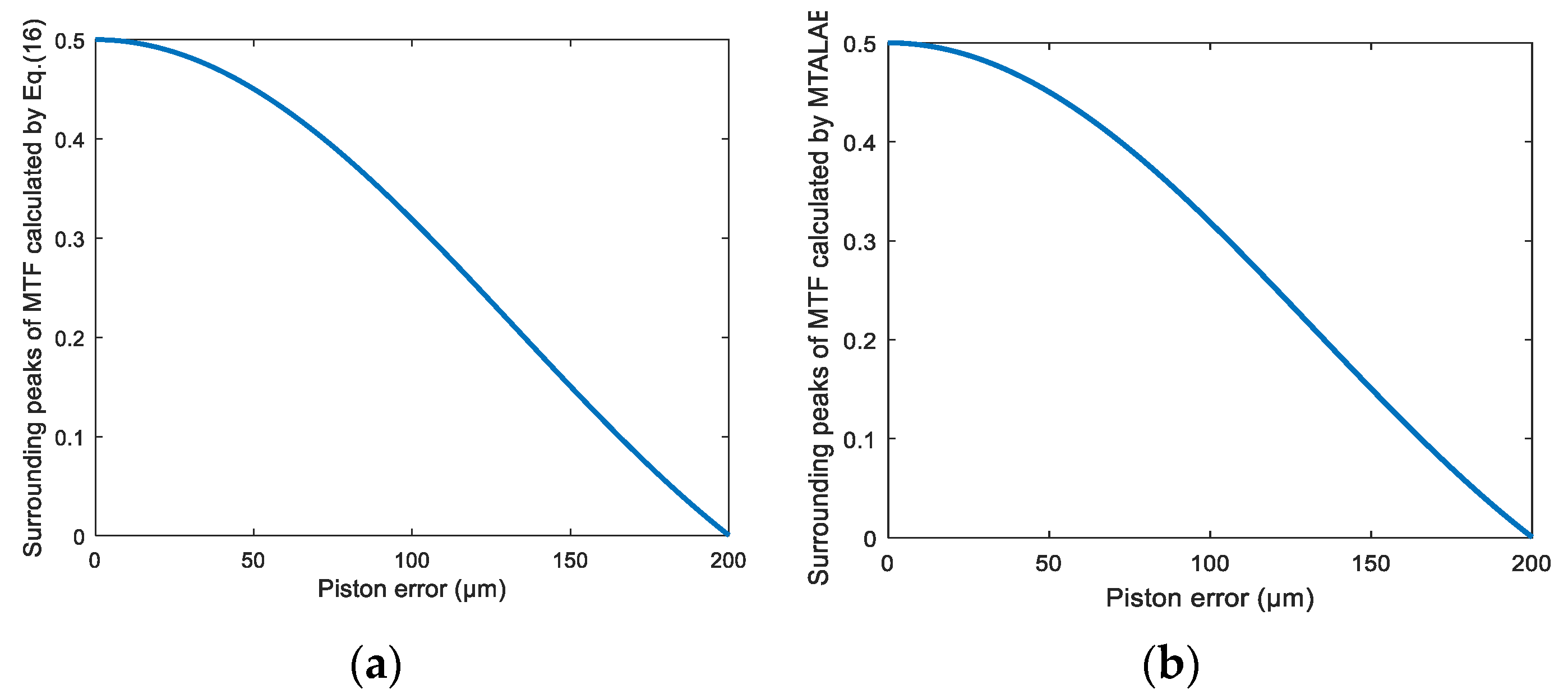
2.2. Verification of the Correctness of the Theoretical Relation by MATLAB Simulation
3. Piston Error Detection Method Using BP Artificial Neural Network
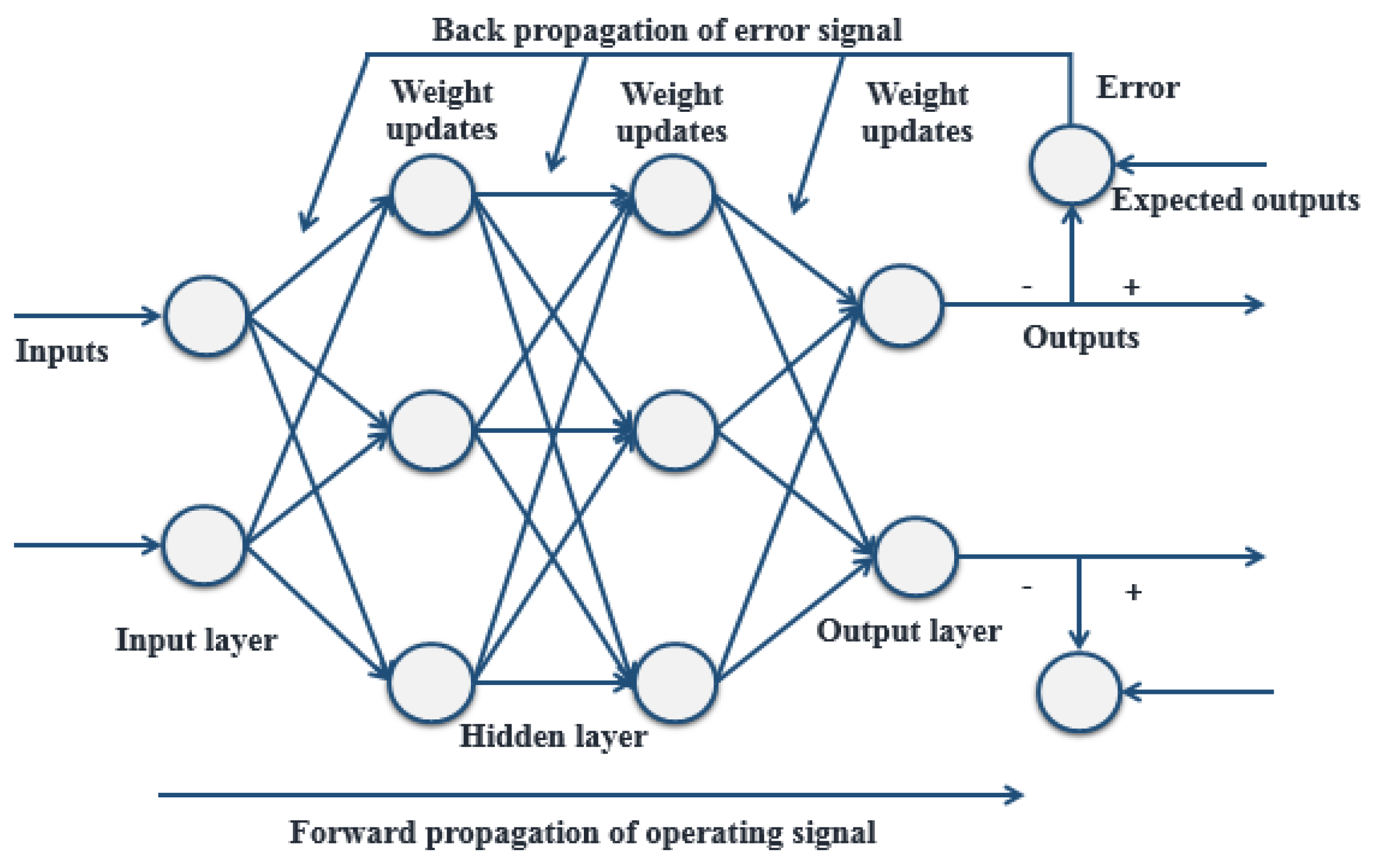
3.1. Brief Introduction of the BP Artificial Neural Network
3.2. Piston Error Detection Approach with BP Artificial Neural Network
- (1)
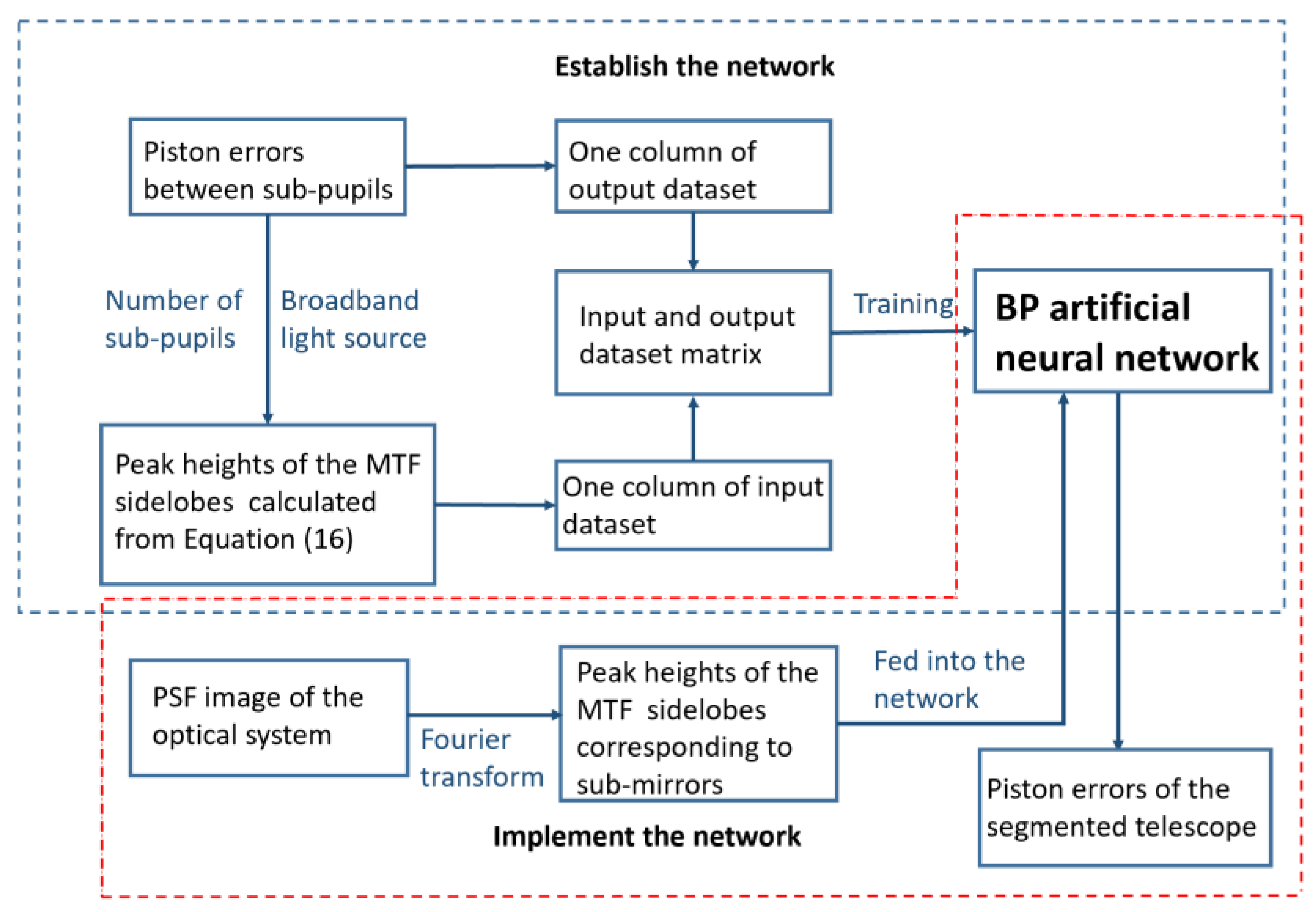
- Determine the system parameters and generate the datasets for training the neural network under the specified system parameters. From Equation (16), we can see that the peak heights of the MTF sidelobes are only related to the input broadband light, the number of sub-pupils and the piston errors between the multiple sub-mirrors. When the segmented telescope and its working wavelength are determined, within the half of the coherent length of input light, a set of piston errors between segments is randomly introduced, and by taking the corresponding piston errors into Equation (16), the peak heights of MTF sidelobes can be obtained. The peak heights of MTF sidelobes directly calculated from Equation (16) served as one column of input matrix and the corresponding piston errors served as one column of the output matrix. Thus the input dataset and output dataset of the network could be generated.
- (2)
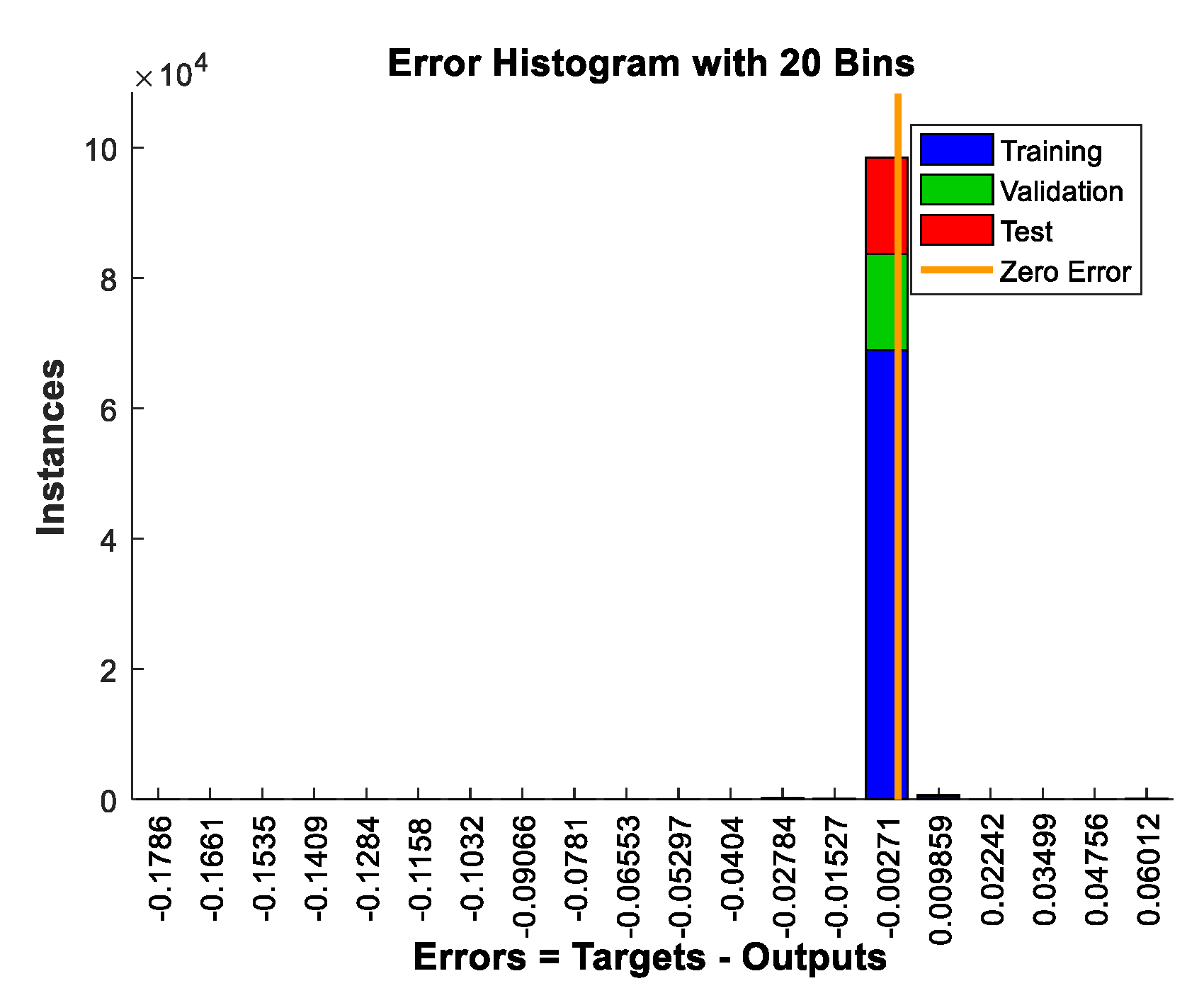
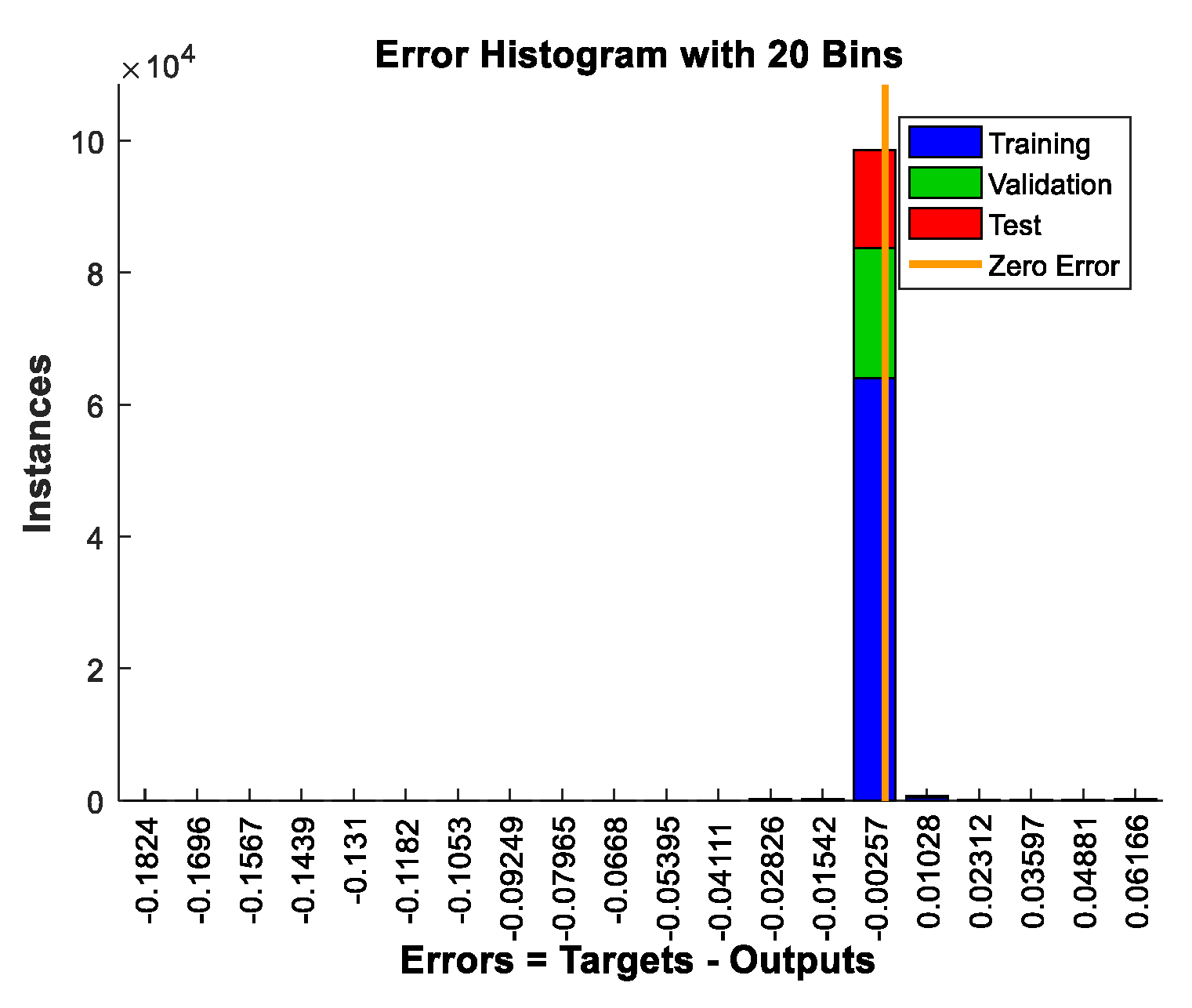
- Establish the neural network and train it with the input dataset and the corresponding output dataset. Here we utilized the neural network fitting tool in MATLAB, and by properly setting the number of neurons in each layer, the neural network was established. In the training process, the dataset is separated into three parts including training set, validation set and test set, then a specific training algorithm is set to train the network.
- (3)
- Once the network is well trained, we can apply the trained neural network to determine the piston errors with the PSF image collected from the optical system. Note that the image should be Fourier transformed first to get the peak heights of the MTF sidelobes before they can be handled with the neural network. By establishing the correspondence of the MTF sidelobes with their associated sub-pupils, multiple piston error measurements of the whole aperture can be implemented simultaneously by one detection of a CCD broadband image.
4. Simulation
4.1. Piston Error Detection for the Telescope Composed of Two Segments
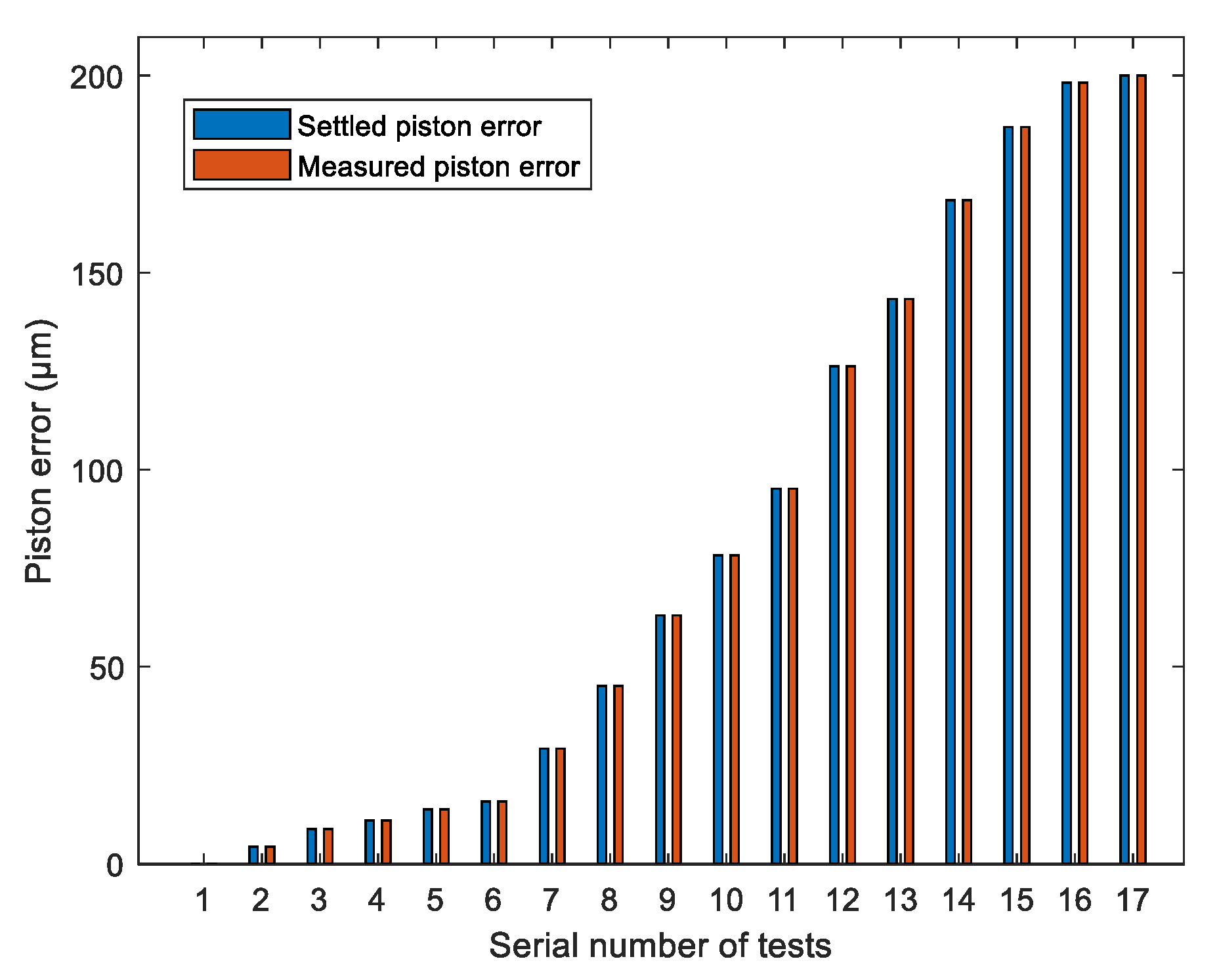
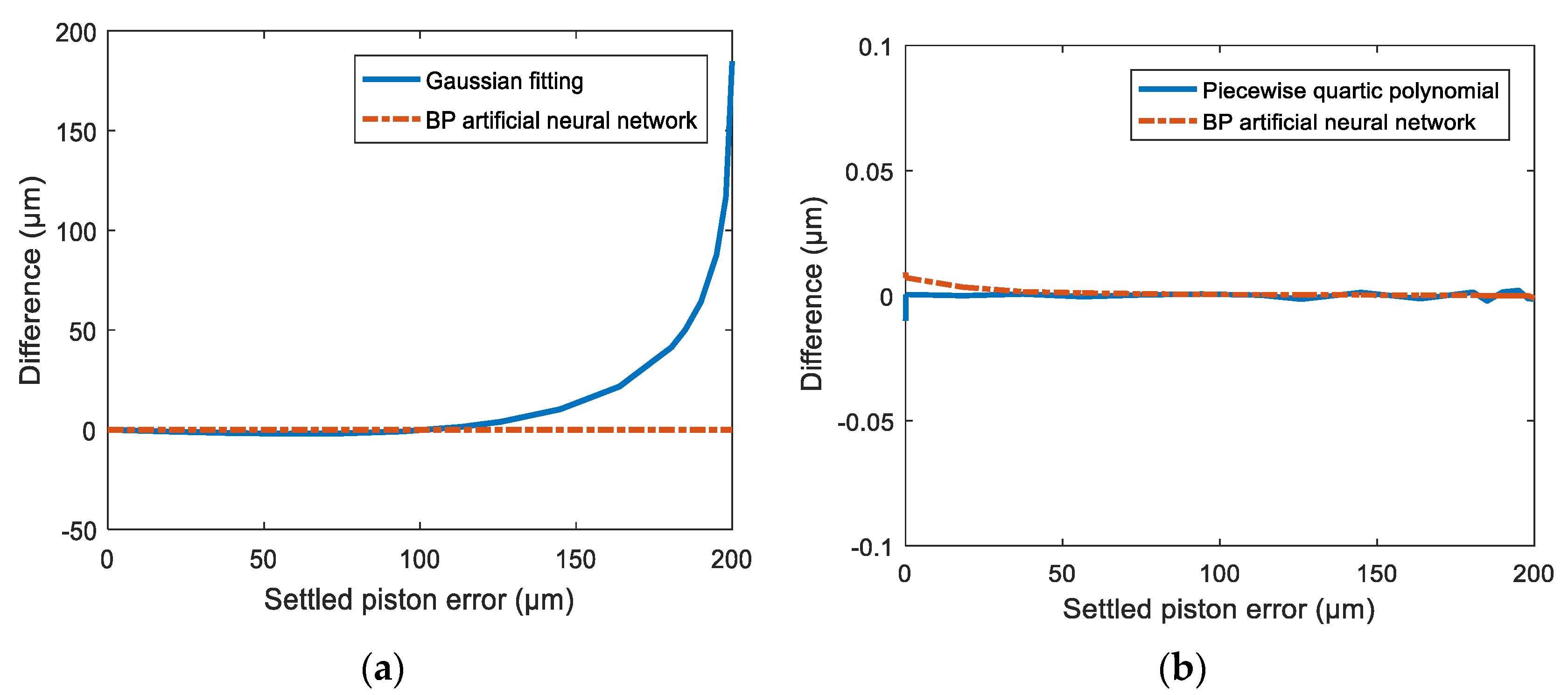
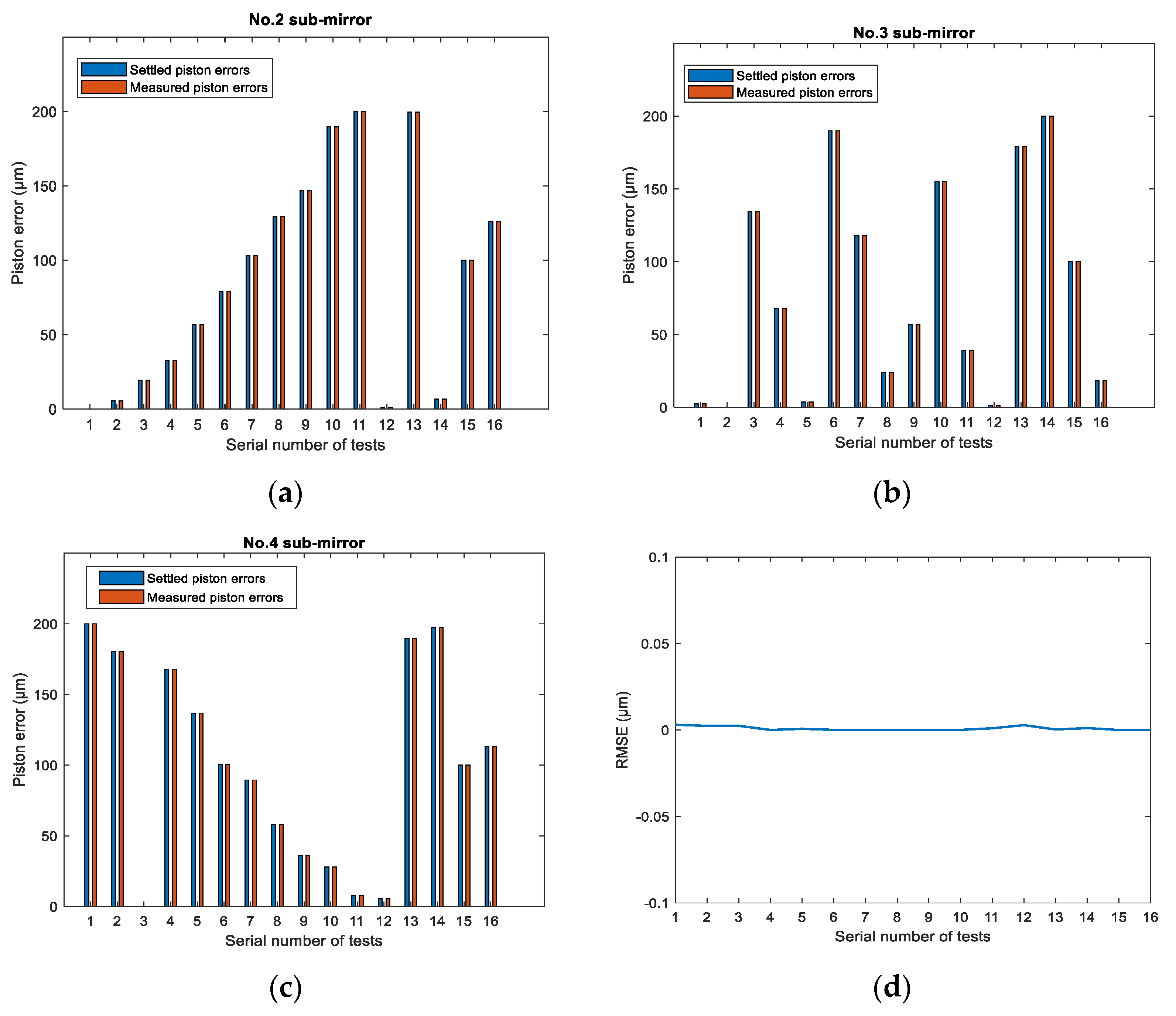
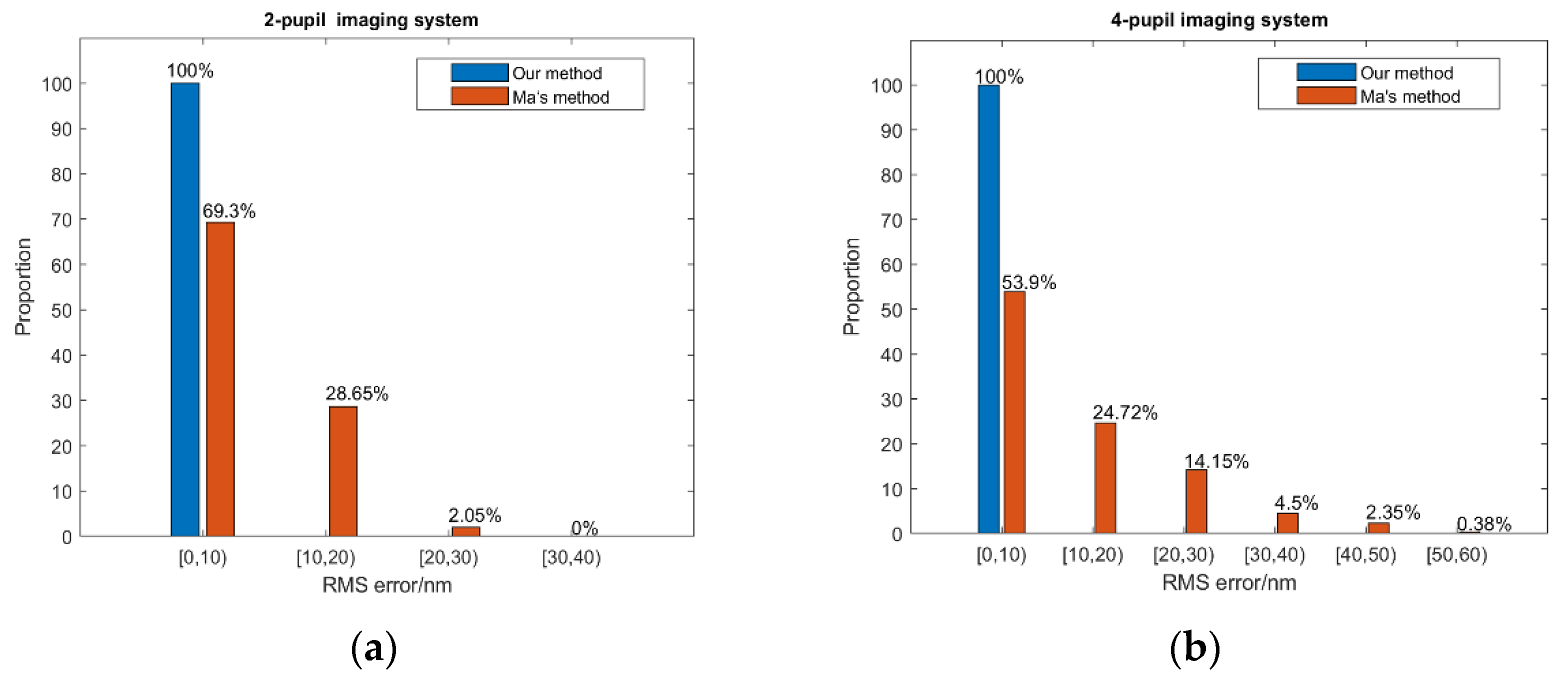
4.2. Simultaneous Multi-Piston Measurement
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Bely, P.Y. The Design and Construction of Large Optical Telescopes; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2003. [Google Scholar]
- Noethe, L. History of mirror casting, figuring, segmentation and active optics. Exp. Astron. 2009, 26, 1–18. [Google Scholar] [CrossRef]
- Nelson, J.E.; Gillingham, P.R. Overview of the performance of the W. M. Keck Observatory. Proc. SPIE 1994, 2199, 82–93. [Google Scholar]
- Chanan, G.A.; Mast, T.S.; Nelson, J.E. Keck telescope primary mirror segments: Initial alignment and active control. In Proceedings of European Southern Observatory Conference on Very Large Telescopes and their Instrumentation; Ulrich, M.-H., Ed.; ESO: Garching, Germany, 1988; pp. 421–428. [Google Scholar]
- Gilmozzi, R.; Spyromilio, J. The 42m European ELT: Status, SPIE Astronomical Telescopes Instrumentation. Int. Soc. Opt. Photonics 2008, 7012, 701219. [Google Scholar]
- Nelson, J.; Sanders, G.H. The status of the Thirty Meter Telescope project. Proc. SPIE 2008, 7012, 70121A. [Google Scholar]
- Clampin, M. Status of the James Webb Space Telescope observatory. Proc. SPIE 2012, 8442, 84422A. [Google Scholar]
- Oegerle, W.R.; Feinberg, L.D.; Purves, L.R.; Hyde, T.T.; Thronson, H.A.; Townsend, J.A.; Postman, M.; Bolcar, M.R.; Budinoff, J.G.; Dean, B.H.; et al. ATLAST-9.2m: A large-aperture deployable space telescope. Proc. SPIE 2010, 7731, 52–56. [Google Scholar]
- Acton, D.S.; Atcheson, P.; Cermak, M. James Webb Space Telescope Wavefront Sensing and Control Algorithms, SPIE Astronomical Telescopes Instrumentation. Int. Soc. Opt. Photonics 2004, 887–896. [Google Scholar] [CrossRef]
- Chanan, G.; Ohara, C.; Troy, M. Phasing the mirror segments of the Keck telescopes II: The narrow-band phasing algorithm. Appl. Opt. 2000, 39, 4706–4714. [Google Scholar] [CrossRef]
- Chanan, G.; Troy, M.; Dekens, F. Phasing the mirror segments of the Keck telescopes: The broadband phasing algorithm. Appl. Opt. 1998, 37, 140–155. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Esposito, S.; Puglisi, A.; Tozzi, A. Co-phasing of segmented mirror using pyramid sensor. SPIE 2003, 5169. [Google Scholar] [CrossRef]
- Esposito, S.; Puglisi, A.; Tozzi, A. Pyramid sensor for segmented mirror alignment. Opt. Lett. 2005, 30, 2572–2574. [Google Scholar] [CrossRef]
- Shi, F.; Redding, D.C.; Lowman, A.E.; Bowers, C.W.; Burns, L.A.; Petrone, P., III; Ohara, C.M.; Basinger, S.A. Segmented mirror coarse phasing with a dispersed fringe sensor: Experiment on NGST’s wavefront control testbed. Proc. SPIE 2003, 4850, 318–328. [Google Scholar]
- Van Dam, M.A.; Mcleod, B.A.; Bouchez, A.H. Dispersed fringe sensor for the Giant Magellan Telescope. Appl. Opt. 2016, 55, 539–547. [Google Scholar] [CrossRef]
- Yue, D.; Xu, S.Y.; Nie, H.T. Co-phasing of the segmented mirror and image retrieval based on phase diversity using a modified algorithm. Appl. Opt. 2015, 54, 7917–7924. [Google Scholar] [CrossRef]
- Zhang, N.; Zhang, X.; Xu, S.; Liu, N.; Zhao, L. Simplified Phase Diversity algorithm based on a first-order Taylor expansion. Appl. Opt. 2016, 55, 7872. [Google Scholar]
- Paxman, R.G.; Schulz, T.J.; Fienup, J.R. Joint estimation of object and aberrations by using phase diversity. J. Opt. Soc. Am. A 1992, 9, 1072–1085. [Google Scholar] [CrossRef] [Green Version]
- Baron, F.; Mocoeur, I.; Cassaing, F.; Mugnier, L.M. Unambiguous phase retrieval as a co-phasing sensor for phased array telescopes. J. Opt. Soc. Am. A 2008, 25, 1000–1015. [Google Scholar] [CrossRef] [Green Version]
- Ju, G.; Yan, C.; Dan, Y.; Gu, Z. Field diversity phase retrieval method for wavefront sensing in monolithic mirror space telescopes. Appl. Opt. 2017, 56, 4224. [Google Scholar] [CrossRef]
- Simar, J.F.; Stockman, Y.; Surdej, J. Single-wavelength coarse phasing in segmented telescopes. Appl. Opt. 2015, 54, 1118–1123. [Google Scholar] [CrossRef] [Green Version]
- Jiang, J.; Zhao, W. Phasing piston error in segmented telescopes. Opt. Express 2016, 24, 19123–19137. [Google Scholar] [CrossRef]
- Lauterborn, W.; Kurz, R.; Wiesenfeldt, D. Fourier Optics; Springer Science & Business Media: Berlin/Heidelberg, Germany, 1995. [Google Scholar]
- Li, Z.; Zhao, X. BP artificial neural network-based wave front correction for sensor-less free space optics communication. Opt. Commun. 2017, 385, 219–228. [Google Scholar] [CrossRef]
- Guo, H.; Xin, Q.; Ma, H.; Yan, C. Feature-based phase retrieval wavefront sensing approach using machine learning. Opt. Express 2018, 26, 31767–31783. [Google Scholar]
- Paykin, I.; Yacobi, L.; Adler, J.; Ribak, E.N. Phasing a segmented telescope. Phys. Rev. E Stat. Nonlinear Soft Matter Phys. 2015, 91, 023302. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Hagan, M.T.; Beale, M. Neural Network Design; China Machine Press: Bejing, China, 2002. [Google Scholar]
- Guo, H.; Xu, Y.; Li, Q.; Du, S.; He, D.; Wang, Q.; Huang, Y. Improved Machine Learning Approach for Wavefront Sensing. Sensors 2019, 19, 3533. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Hu, S.; Hu, L.; Zhang, B.; Gong, W.; Si, K. Simplifying the detection of optical distortions by machine learning. J. Innov. Opt. Health Sci. 2019, 13. [Google Scholar] [CrossRef] [Green Version]
- Tian, Q.; Lu, C.; Liu, B.; Zhu, L.; Pan, X.; Zhang, Q.; Yang, L.; Tian, F.; Xin, X. DNN-based aberration correction in a wavefront sensorless adaptive optics system. Opt. Express 2019, 27, 10765–10776. [Google Scholar] [CrossRef] [PubMed]
- Zhao, W.; Zeng, Q. Simultaneous multi-piston measurement method in segmented telescopes. Opt. Express 2017, 25, 24540–24552. [Google Scholar] [CrossRef]
- Ma, X.; Xie, Z.; Ma, H.; Xu, Y.; Ren, G.; Liu, Y. Piston sensing of sparse aperture systems with a single broadband image via deep learning. Opt. Express 2019, 27, 16058. [Google Scholar] [CrossRef]














Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yue, D.; He, Y.; Li, Y. Piston Error Measurement for Segmented Telescopes with an Artificial Neural Network. Sensors 2021, 21, 3364. https://doi.org/10.3390/s21103364
Yue D, He Y, Li Y. Piston Error Measurement for Segmented Telescopes with an Artificial Neural Network. Sensors. 2021; 21(10):3364. https://doi.org/10.3390/s21103364
Chicago/Turabian StyleYue, Dan, Yihao He, and Yushuang Li. 2021. "Piston Error Measurement for Segmented Telescopes with an Artificial Neural Network" Sensors 21, no. 10: 3364. https://doi.org/10.3390/s21103364
APA StyleYue, D., He, Y., & Li, Y. (2021). Piston Error Measurement for Segmented Telescopes with an Artificial Neural Network. Sensors, 21(10), 3364. https://doi.org/10.3390/s21103364