
Portable Interactive Pulse Tactile Recorder and Player System


Abstract
:1. Introduction
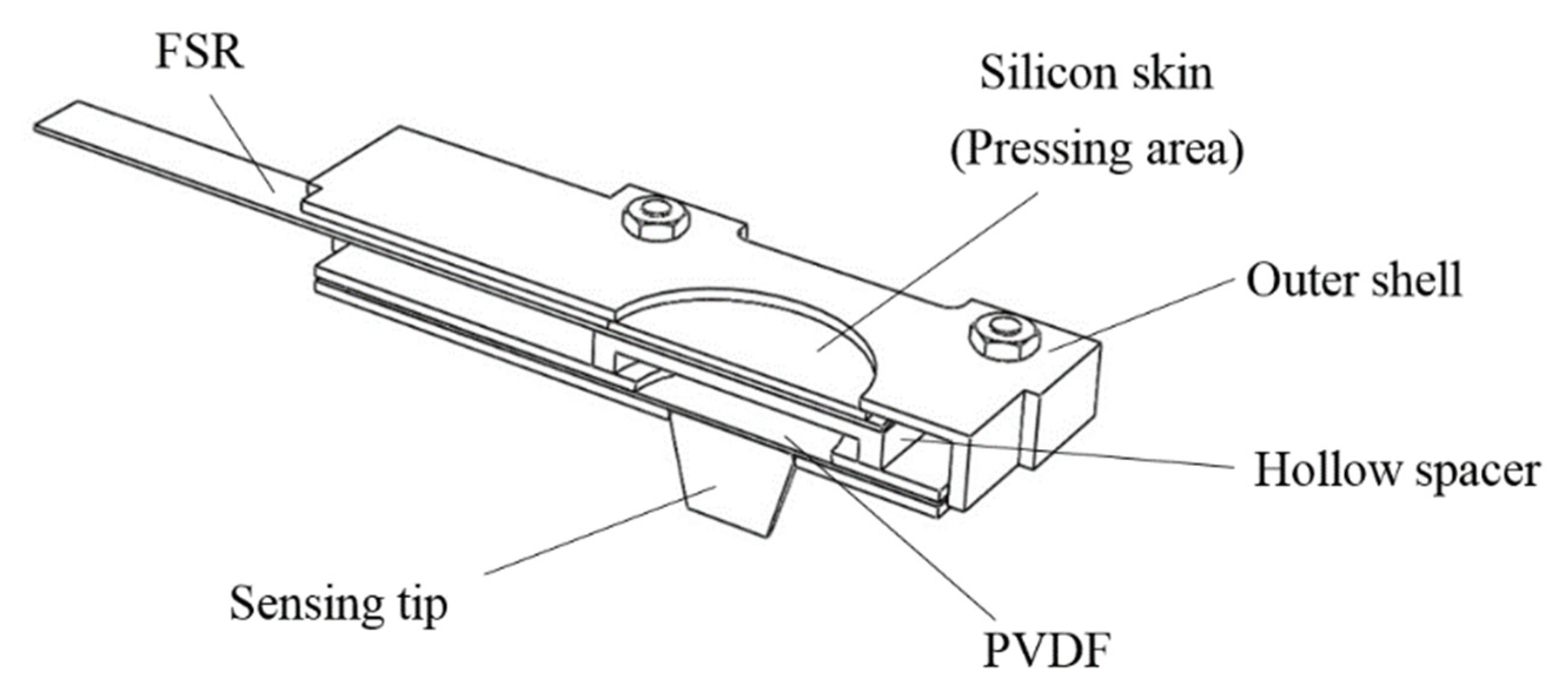
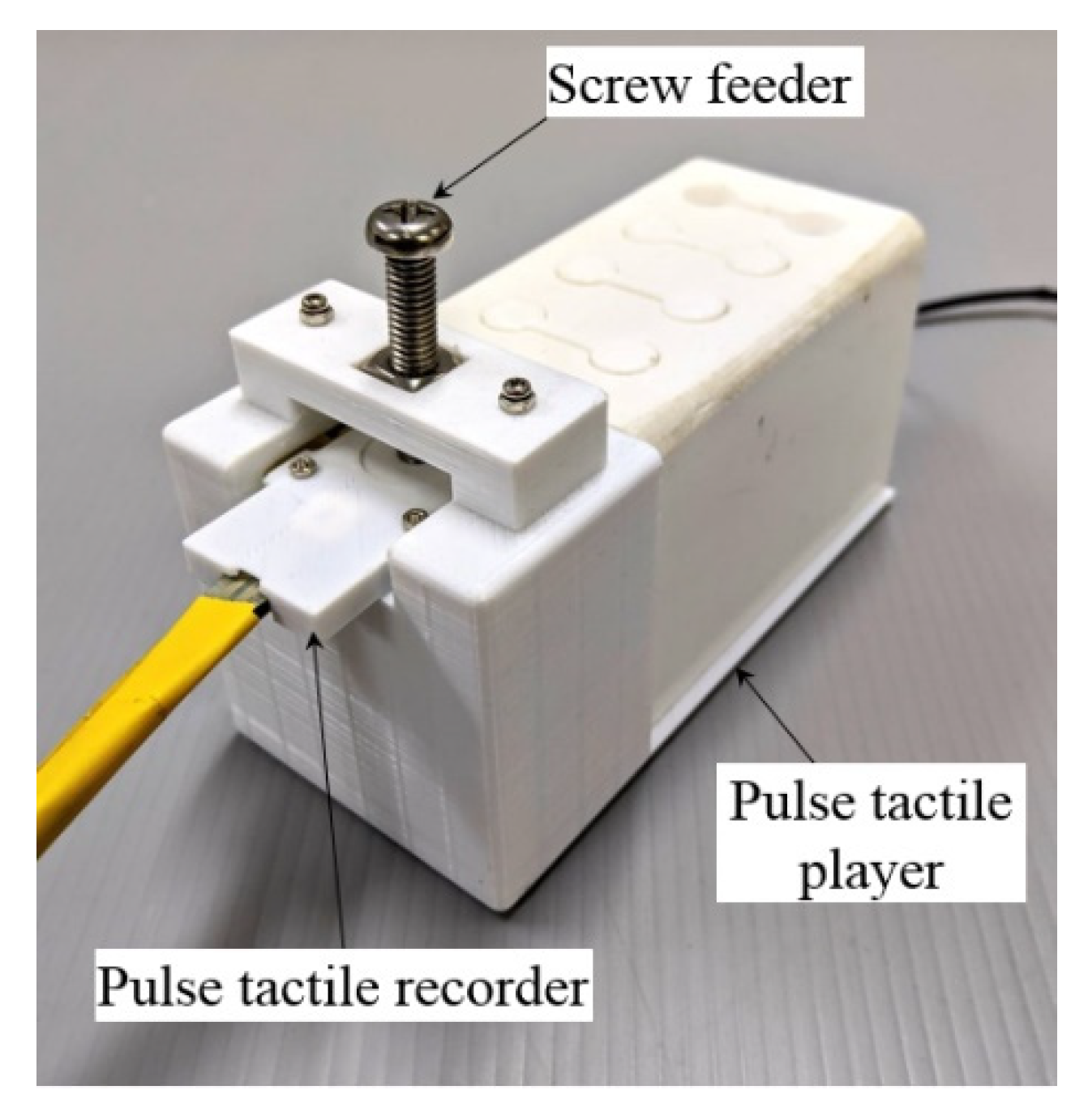
2. Pulse Tactile Recorder
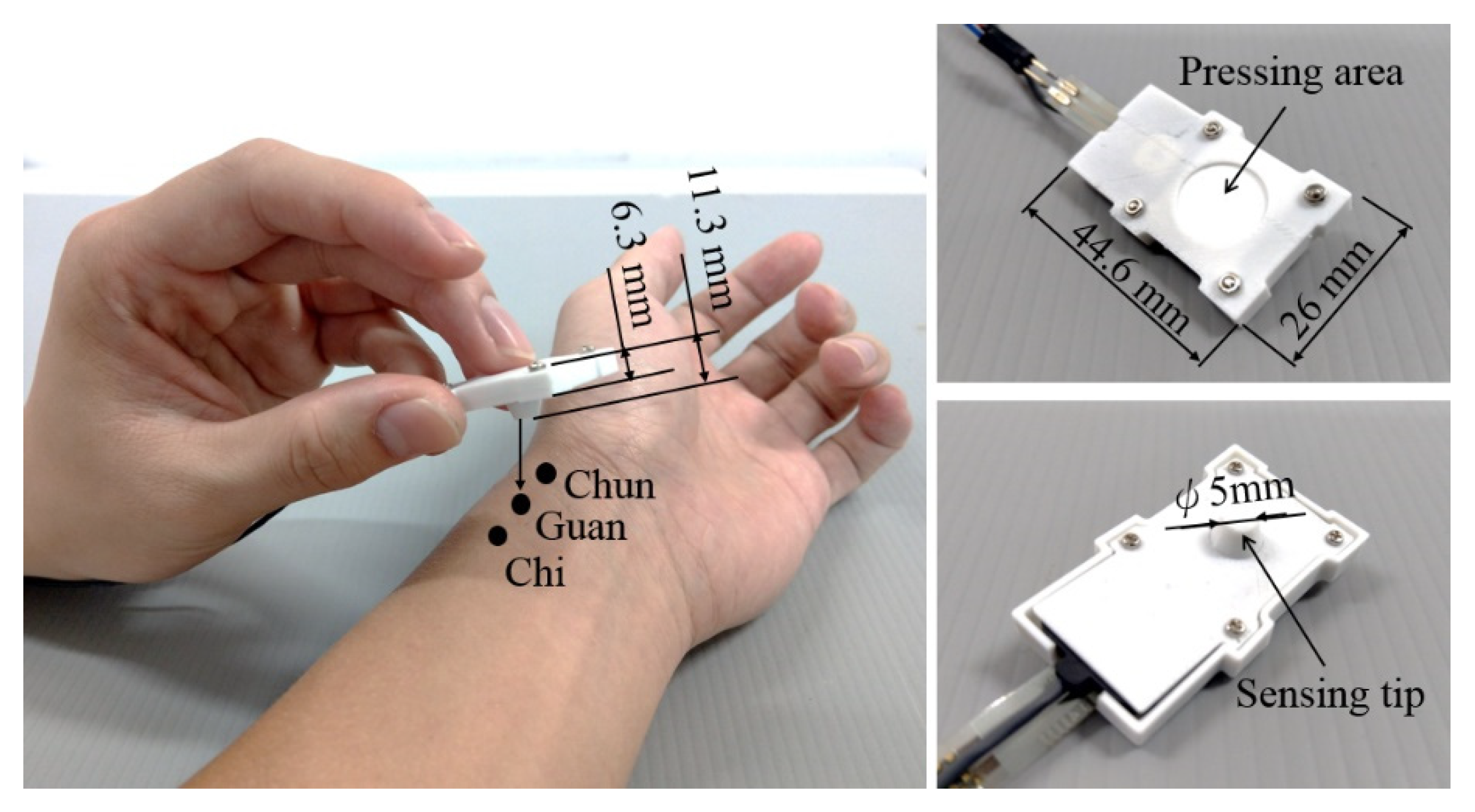
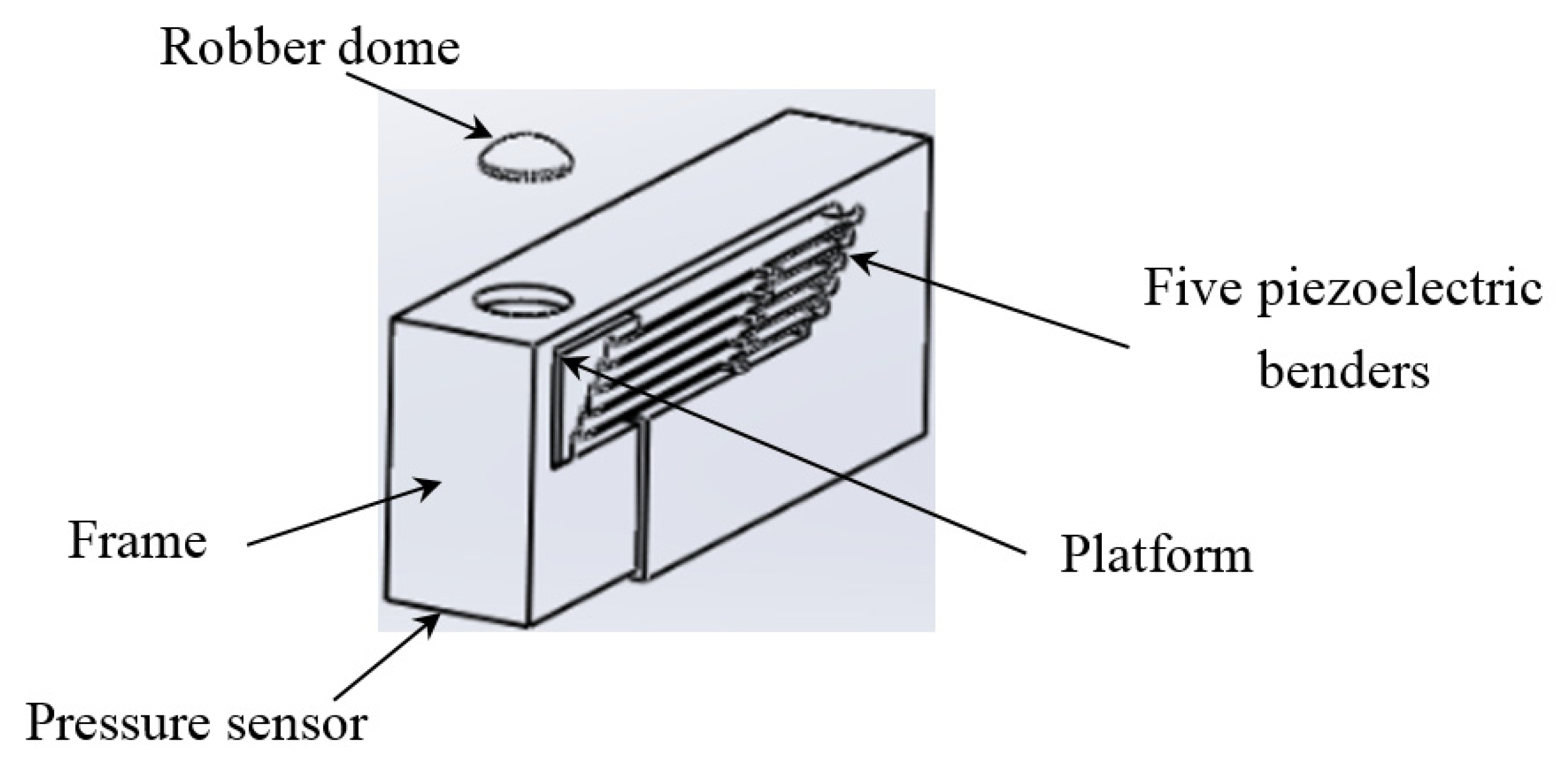
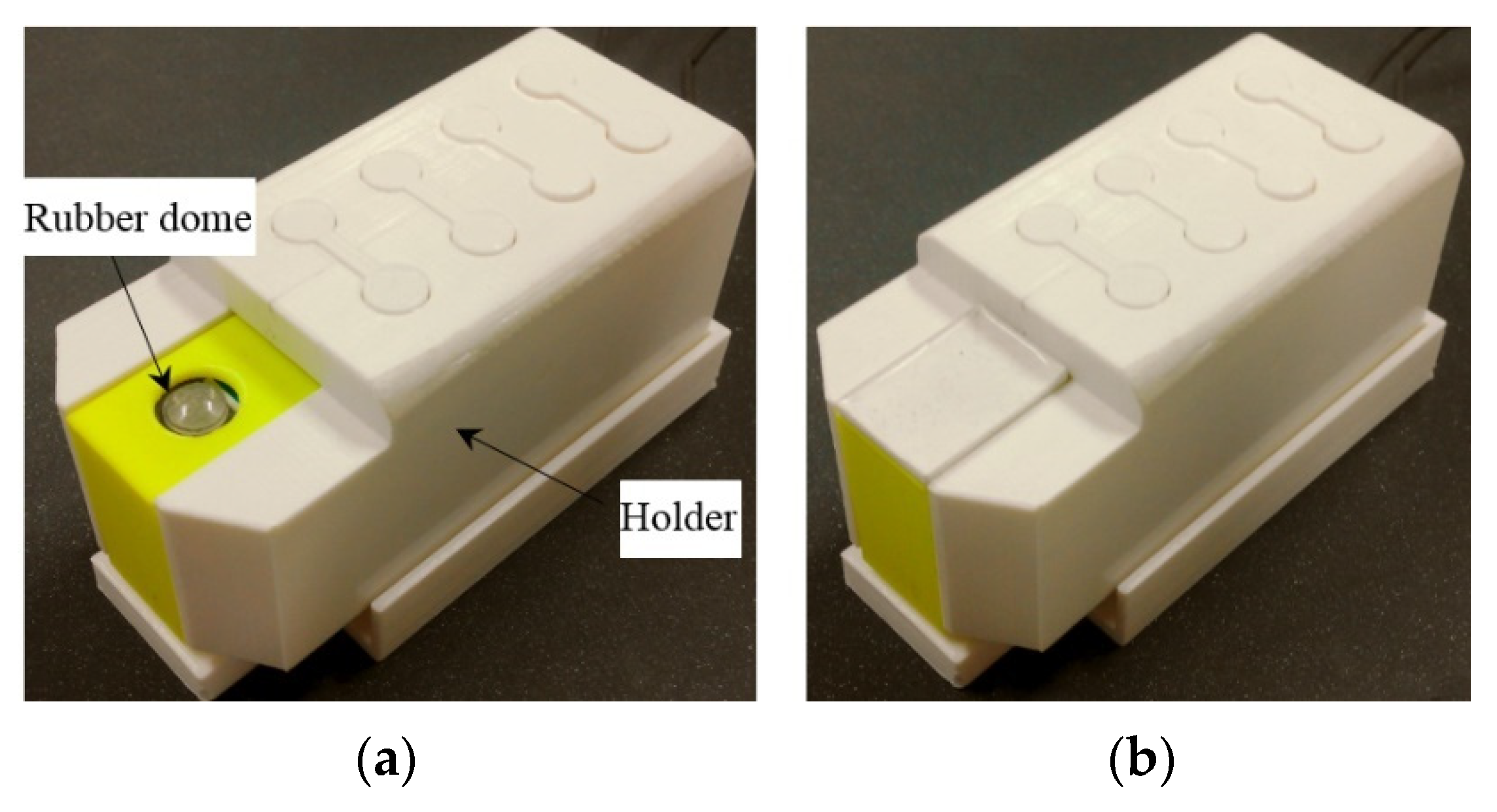
2.1. Hardware Design
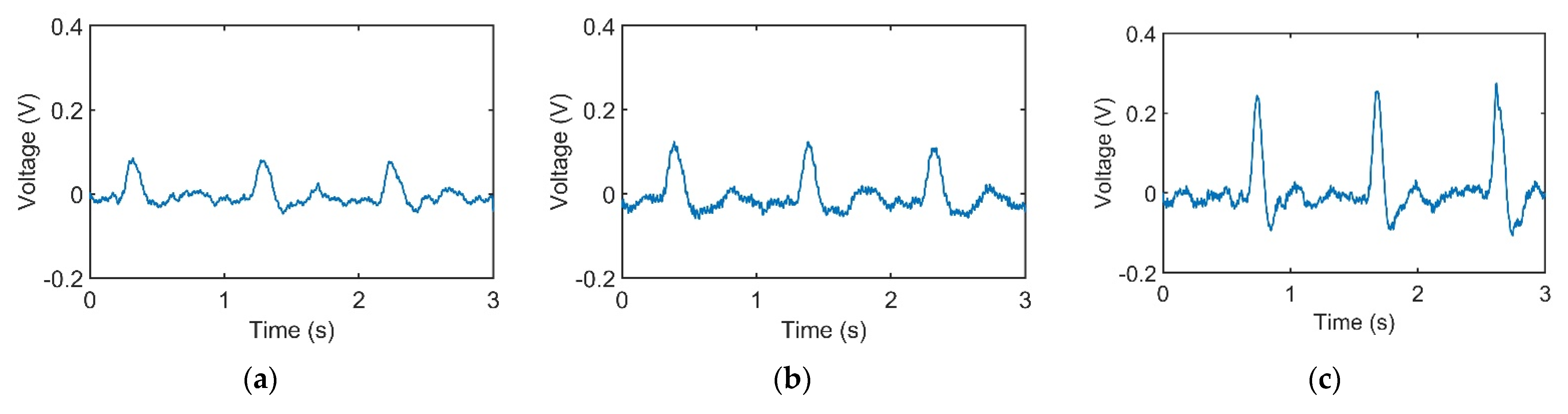
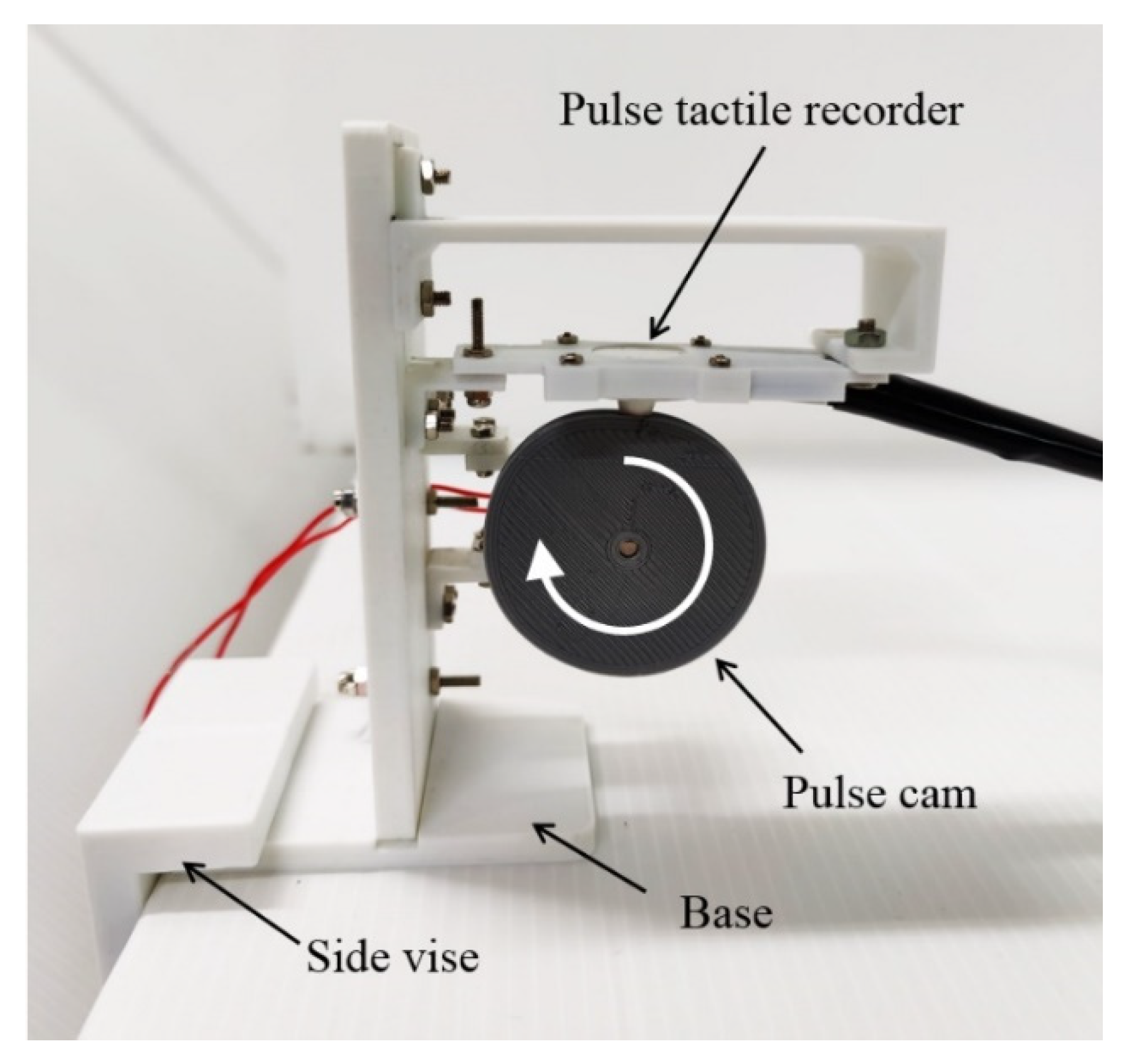
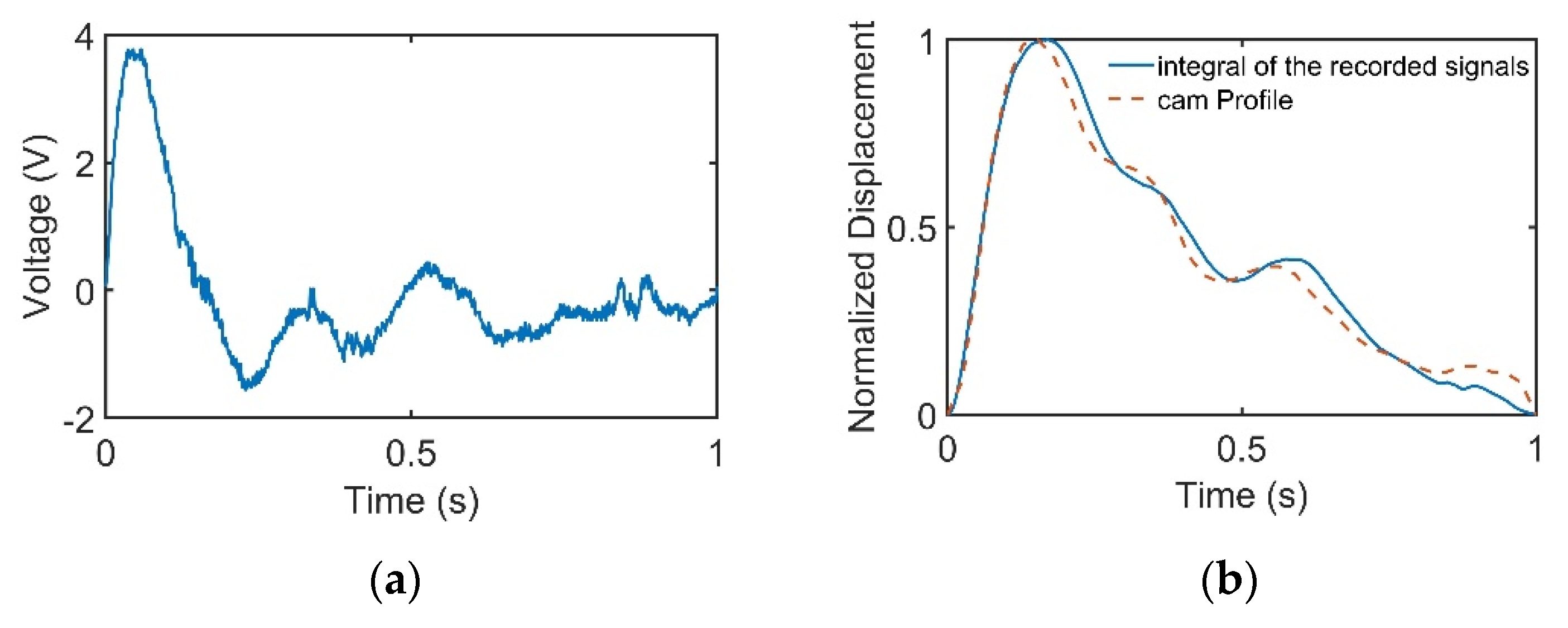
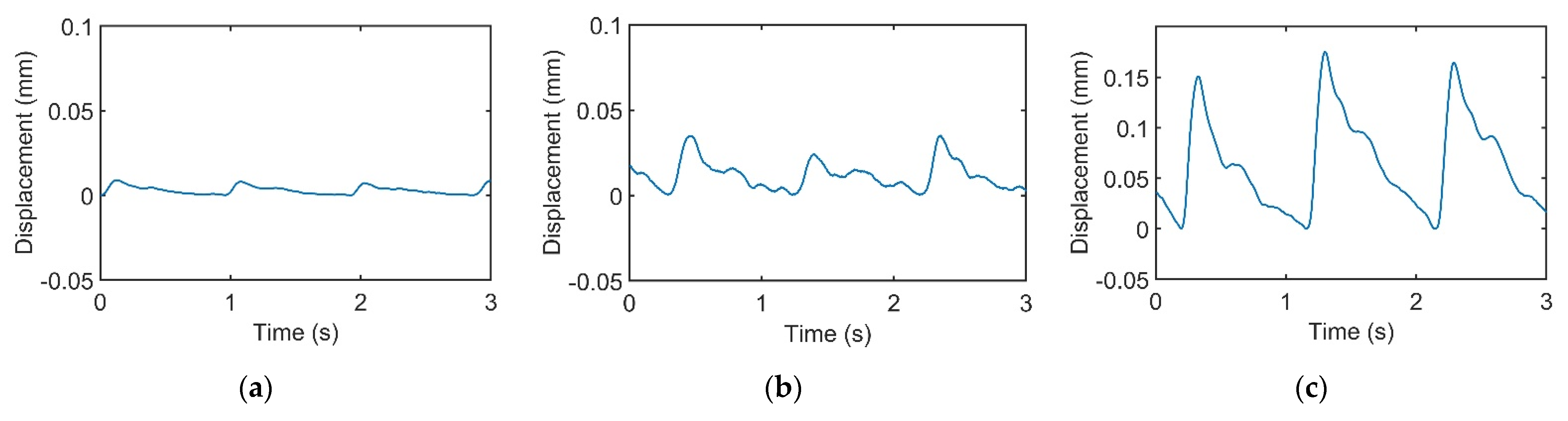
2.2. Pulse Signal Verification
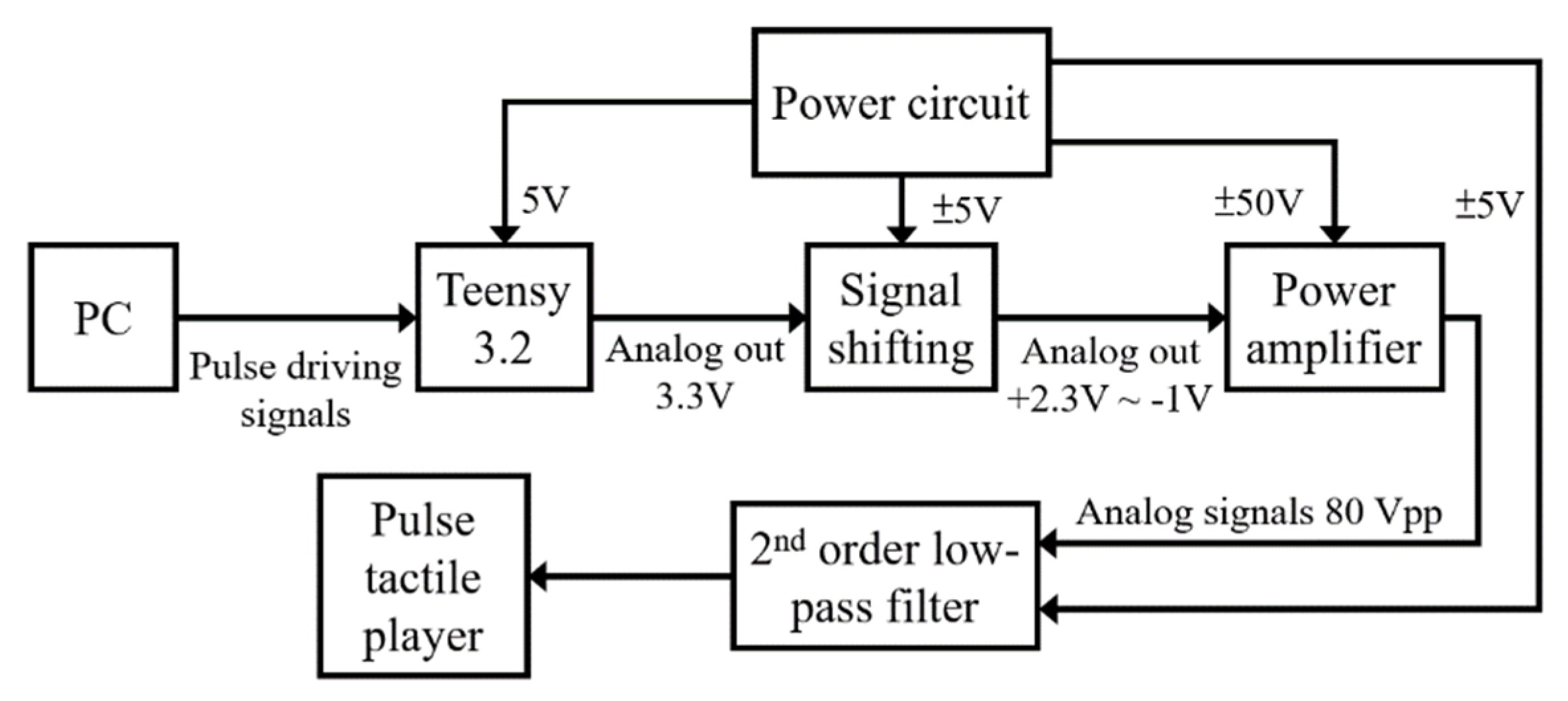
3. Pulse Tactile Player
4. Linear Model
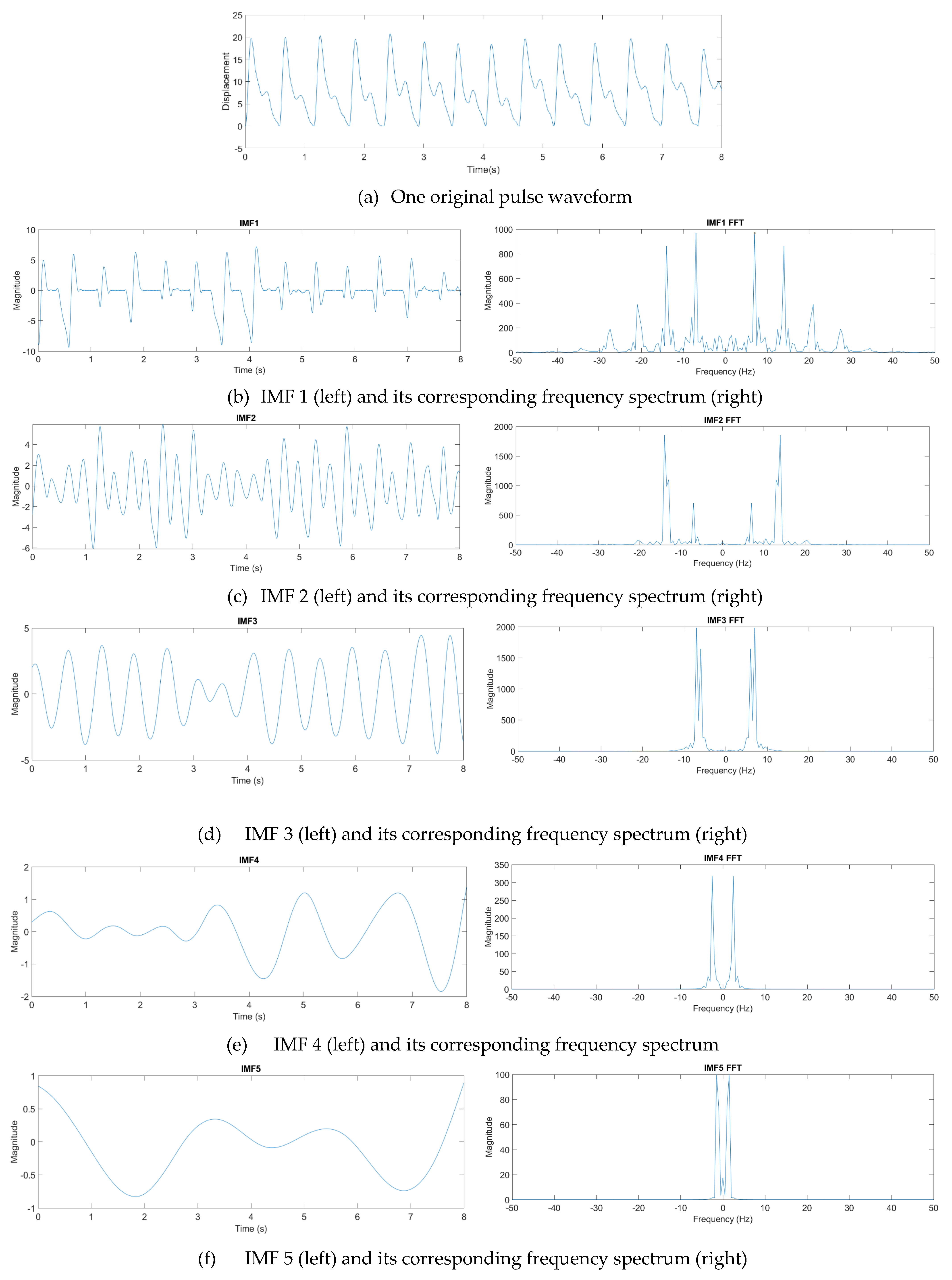
5. Nonlinear Model
5.1. Artificial Neural Network
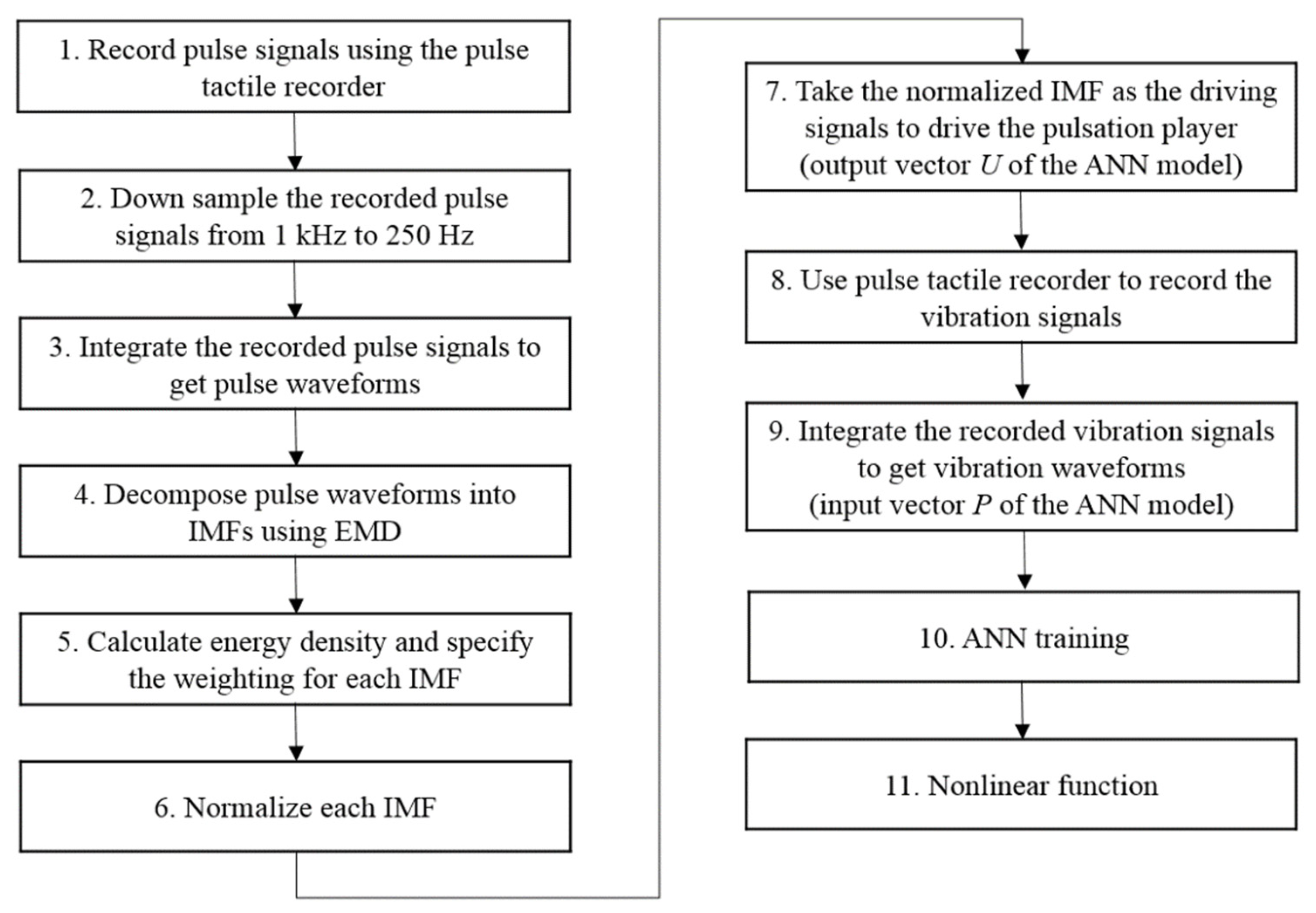
5.2. ANN Training Data Collection
5.3. ANN Training Model
5.4. Pulse Reproduction and Verification
5.4.1. Driving Signals
5.4.2. Verification Results
6. Discussion
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Lee, J.-Y.; Jang, M.; Shin, S.-H. Study on the depth, rate, shape, and strength of pulse with cardiovascular simulator. Evid. Based Complement. Altern. Med. 2017, 2017, 1–11. [Google Scholar] [CrossRef] [PubMed]
- Luo, C.-H.; Chung, C.-Y. Non-invasive holistic health measurements using pulse diagnosis: II. Exploring TCM clinical holistic diagnosis using an ingestion test. Eur. J. Integr. Med. 2016, 8, 926–931. [Google Scholar] [CrossRef]
- Tang, A.C.Y. Review of traditional Chinese medicine pulse diagnosis quantification. In Complementary Therapies for the Contemporary Healthcare; Saad, M., Medeiros, R.D., Eds.; IntechOpen: London, UK, 2012; pp. 61–80. [Google Scholar]
- Du, Y.-C.; Stephanus, A. Levenberg-marquardt neural network algorithm for degree of arteriovenous fistula stenosis classification using a dual optical photoplethysmography sensor. Sensors 2018, 18, 2322. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Guo, Q.-L.; Wang, K.-Q.; Zhang, D.-Y.; Li, N.-M. A wavelet packet based pulse waveform analysis for cholecystitis and nephrotic syndrome diagnosis. In Proceedings of the International Conference on Wavelet Analysis and Pattern Recognition, Hong Kong, China, 30–31 August 2008; pp. 513–517. [Google Scholar]
- Liu, L.; Li, N.; Zuo, W.; Zhang, D.; Zhang, H. Multiscale sample entropy analysis of wrist pulse blood flow signal for disease diagnosis. In Proceedings of the Intelligent Science and Intelligent Data Engineering, Berlin/Heidelberg, Germany, 31 July–2 August 2013; pp. 475–482. [Google Scholar]
- Zhang, Z.; Zhang, Y.; Yao, L.; Song, H.; Kos, A. A sensor-based wrist pulse signal processing and lung cancer recognition. J. Biomed. Inform. 2018, 79, 107–116. [Google Scholar] [CrossRef]
- Suguna, G.; Veerabhadrappa, S. A review of wrist pulse analysis. Biomed. Res. 2019, 30, 538–545. [Google Scholar]
- Wang, Y.J.; Chen, C.H.; Sue, C.Y.; Lu, W.H.; Chiou, Y.H. Estimation of blood pressure in the radial artery using strain-based pulse wave and photoplethysmography sensors. Micromachines 2018, 9, 556. [Google Scholar] [CrossRef] [Green Version]
- Castaneda, D.; Esparza, A.; Ghamari, M.; Soltanpur, C.; Nazeran, H. A review on wearable photoplethysmography sensors and their potential future applications in health care. Int. J. Biosens. Bioelectron. 2018, 4, 195–202. [Google Scholar]
- Chu, Y.-W.; Luo, C.-H.; Chung, Y.-F.; Hu, C.-S.; Yeh, C.-C. Using an array sensor to determine differences in pulse diagnosis—Three positions and nine indicators. Eur. J. Integr. Med. 2014, 6, 516–523. [Google Scholar] [CrossRef]
- Tyan, C.C.; Liu, S.H.; Chen, J.Y.; Chen, J.J.; Liang, W.M. A novel noninvasive measurement technique for analyzing the pressure pulse waveform of the radial artery. IEEE Trans. Biomed. Eng. 2008, 55, 288–297. [Google Scholar] [CrossRef] [PubMed]
- Jin, C.; Xia, C.; Zhang, S.; Wang, L.; Wang, Y.; Yan, H. A wearable combined wrist pulse measurement system using airbags for pressurization. Sensors 2019, 19, 386. [Google Scholar] [CrossRef] [Green Version]
- Kaisti, M.; Panula, T.; Leppanen, J.; Punkkinen, R.; Jafari Tadi, M.; Vasankari, T.; Jaakkola, S.; Kiviniemi, T.; Airaksinen, J.; Kostiainen, P.; et al. Clinical assessment of a non-invasive wearable MEMS pressure sensor array for monitoring of arterial pulse waveform, heart rate and detection of atrial fibrillation. NPJ Digit. Med. 2019, 2, 39. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- He, D.; Zheng, L.; Liu, J.; Geng, N.; Dejun, G.; Xu, L. Variation of radial pulse wave contour influenced by contact pressure. In Proceedings of the 36th Annual International Conference of the IEEE Engineering in Medicine and Biology Society, EMBC, Chicago, IL, USA, 26–30 August 2014; Volume 2014, pp. 5635–5638. [Google Scholar]
- Chen, C.; Li, Z.; Zhang, Y.; Zhang, S.; Hou, J.; Zhang, H. A 3D Wrist Pulse Signal Acquisition System for Width Information of Pulse Wave. Sensors 2019, 20, 11. [Google Scholar] [CrossRef] [Green Version]
- Nie, J.; Ji, M.; Chu, Y.; Meng, X.; Wang, Y.; Zhong, J.; Lin, L. Human pulses reveal health conditions by a piezoelectret sensor via the approximate entropy analysis. Nano Energy 2019, 58, 528–535. [Google Scholar] [CrossRef]
- Parikh, K.; Thakker, B. Wrist pulse classification system for healthy and unhealthy subjects. Int. J. Comput. Appl. 2015, 124, 1–5. [Google Scholar] [CrossRef]
- Sun, Y.; Dong, Y.; Gao, R.; Chu, Y.; Zhang, M.; Qian, X.; Wang, X. Wearable pulse wave monitoring system based on MEMS sensors. Micromachines 2018, 9, 90. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Li, J.Q.; Li, R.; Chen, Z.Z.; Deng, G.Q.; Wang, H.; Mavromoustakis, C.X.; Song, H.; Ming, Z. Design of a continuous blood pressure measurement system based on pulse wave and ECG signals. IEEE J. Transl. Eng. Health Med. 2018, 6, 1900114. [Google Scholar] [CrossRef] [PubMed]
- Li, B.N.; Fu, B.B.; Dong, M.C. Development of a mobile pulse waveform analyzer for cardiovascular health monitoring. Comput. Biol. Med. 2008, 38, 438–445. [Google Scholar] [CrossRef] [PubMed]
- Koo, J.-H.; Tantiyartyanontha, T.; Kim, Y.-M.; Kang, H.; Yang, T.-H. Application of magneto-rheological fluids for generating a wide range of radial pulse waveforms. Smart Mater. Struct. 2018, 27, 125010. [Google Scholar] [CrossRef]
- Yang, T.H.; Kim, J.U.; Kim, Y.M.; Koo, J.H.; Woo, S.Y. A new blood pulsation simulator platform incorporating cardiovascular physiology for evaluating radial pulse waveform. J. Healthc. Eng. 2019, 2019, 4938063. [Google Scholar] [CrossRef] [Green Version]
- Santos-Carreras, L.; Leuenberger, K.; Rétornaz, P.; Gassert, R.; Bleuler, H. Design and psychophysical evaluation of a tactile pulse display for teleoperated artery palpation. In Proceedings of the 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems, Taipei, Taiwan, 18–22 October 2010; Volume 2010, pp. 5060–5066. [Google Scholar]
- Yang, T.H.; Jo, G.; Koo, J.H.; Woo, S.Y.; Kim, J.U.; Kim, Y.M. A compact pulsatile simulator based on cam-follower mechanism for generating radial pulse waveforms. Biomed. Eng. Online 2019, 18, 1. [Google Scholar] [CrossRef] [Green Version]
- Wang, Q.-M.; Du, X.-H.; Xu, B.; Cross, L.E. Electromechanical coupling and output efficiency of piezoelectric bending actuators. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 1999, 46, 638–646. [Google Scholar] [CrossRef]
- Zhou, H.; Henson, B.; Bell, A.; Blackwood, A.; Beck, A.; Burn, R. Linear piezo-actuator and its applications. In Proceedings of the 5th International Conference on Frontiers of Design and Manufacturing (ICFDM’2002), Dalian, China, 10–12 July 2002; pp. 16–20. [Google Scholar]
- Shahabi, P.; Ghafarirad, H.; Taghvaeipour, A. Nonlinear vibration analysis of piezoelectric bending actuators: Theoretical and experimental studies. Comptes Rendus Mécanique 2019, 347, 953–966. [Google Scholar] [CrossRef]
- Yocum, M.; Abramovich, H. Static behavior of piezoelectric actuated beams. Comput. Struct. 2002, 80, 1797–1808. [Google Scholar] [CrossRef]
- Huang, C.-H.; Wang, Y.-M.; Smith, S. Using high-dimensional features for high-accuracy pulse diagnosis. Math. Biosci. Eng. 2020, 17, 6775–6790. [Google Scholar] [CrossRef] [PubMed]
- Nyquist, H. Certain topics in telegraph transmission theory. Trans. Am. Inst. Electr. Eng. 1928, 47, 617–644. [Google Scholar] [CrossRef]
- Chang, H.; Chen, J.; Liu, Y. Micro-piezoelectric pulse diagnoser and frequency domain analysis of human pulse signals. J. Tradit. Chin. Med. Sci. 2018, 5, 35–42. [Google Scholar] [CrossRef]
- Çelik, E.; Uzun, Y.; Kurt, E.; Öztürk, N.; Topaloğlu, N. A neural network design for the estimation of nonlinear behavior of a magnetically-excited piezoelectric harvester. J. Electron. Mater. 2018, 47, 4412–4420. [Google Scholar] [CrossRef]
- Huang, N.; Shen, Z.; Long, S.R.; Wu, M.L.C.; Shih, H.H.; Zheng, Q.; Yen, N.C.; Tung, C.-C.; Liu, H.H. The empirical mode decomposition and the Hilbert spectrum for nonlinear and non-stationary time series analysis. Proc. R. Soc. Lond. Ser. A Math. Phys. Eng. Sci. 1998, 454, 903–995. [Google Scholar] [CrossRef]
- Huang, N.E.; Wu, Z. A review on Hilbert-Huang transform: Method and its applications to geophysical studies. Rev. Geophys. 2008, 46. [Google Scholar] [CrossRef] [Green Version]
- Motin, M.A.; Karmakar, C.K.; Palaniswami, M. Selection of empirical mode decomposition techniques for extracting breathing rate From PPG. IEEE Signal. Process. Lett. 2019, 26, 592–596. [Google Scholar] [CrossRef]
- Pittara, M.; Orphanidou, C. Robust estimation of pulse rate from a wrist-type PPG during intensive exercise. In Proceedings of the 2018 40th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Honolulu, HI, USA, 18–21 July 2018; Volume 2018, pp. 5515–5518. [Google Scholar]
- Liu, Y.; Sun, X.; Sun, Y.; Zhang, K.; Hong, Y.; Wei, B. A pulse wave based blood pressure monitoring and analysis algorithm. In Proceedings of the Artificial Intelligence, Singapore, 8–10 April 2018; pp. 211–221. [Google Scholar]
- Guo, Z.; Zhao, W.; Lu, H.; Wang, J. Multi-step forecasting for wind speed using a modified EMD-based artificial neural network model. Renew. Energy 2012, 37, 241–249. [Google Scholar] [CrossRef]
- Yu, L.; Wang, S.; Lai, K.K. Forecasting crude oil price with an EMD-based neural network ensemble learning paradigm. Energy Econ. 2008, 30, 2623–2635. [Google Scholar] [CrossRef]
- Gai, G. The processing of rotor startup signals based on empirical mode decomposition. Mech. Syst. Signal. Process. 2006, 20, 222–235. [Google Scholar] [CrossRef]
- Manjula, M.; Sarma, A.V.R.S. Comparison of empirical mode decomposition and wavelet based classification of power quality events. Energy Procedia 2012, 14, 1156–1162. [Google Scholar] [CrossRef] [Green Version]
- Wang, G.; Chen, X.; Qiao, F.-L.; Wu, Z.; Huang, N. On intrinsic mode function. Adv. Adapt. Data Anal. 2010, 2, 277–293. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Factor | Level | ||
|---|---|---|---|
| 1 | 2 | 3 | |
| Height of the sensing tip | 5 mm | 4 mm | 3 mm |
| Thickness of the hollow spacer between FSR and PVDF | 3 mm | 1 mm | 2 mm |
| Number of clamping sides | 2 | 4 | |
| Material of the sensing tip | PLA | Silicon |
| Experiment | Factor Level (ABCD) | R2 | Normalized Peak Voltage | Score |
|---|---|---|---|---|
| 1 | 1111 | 0.98 | 0.65 | 1.63 |
| 2 | 1222 | 0.97 | 0.43 | 1.4 |
| 3 | 1321 | 0.97 | 1 | 1.97 |
| 4 | 2121 | 0.94 | 0.63 | 1.57 |
| 5 | 2211 | 0.91 | 0.57 | 1.48 |
| 6 | 2312 | 0.93 | 0.56 | 1.49 |
| 7 | 3122 | 0.92 | 0.49 | 1.41 |
| 8 | 3212 | 0.93 | 0.35 | 1.28 |
| 9 | 3321 | 0.95 | 0.83 | 1.78 |
| No. | NRMSE | R2 |
|---|---|---|
| 1 | 0.049 | 0.984 |
| 2 | 0.051 | 0.983 |
| 3 | 0.052 | 0.983 |
| 4 | 0.051 | 0.984 |
| 5 | 0.051 | 0.983 |
| 6 | 0.039 | 0.984 |
| 7 | 0.042 | 0.983 |
| 8 | 0.042 | 0.982 |
| 9 | 0.042 | 0.983 |
| 10 | 0.042 | 0.983 |
| Average | 0.046 | 0.983 |
| S.D. | 0.005 | 0.001 |
| Subject No. | Force | Average | ||
|---|---|---|---|---|
| Light | Moderate | Heavy | ||
| 1 | 0.785 | 0.669 | 0.140 | 0.531 |
| 2 | 0.787 | 0.630 | 0.141 | 0.519 |
| 3 | 1.066 | 0.723 | 0.106 | 0.632 |
| 4 | 1.152 | 0.642 | 0.107 | 0.634 |
| 5 | 1.257 | 0.667 | 0.108 | 0.677 |
| 6 | 0.771 | 0.667 | 0.103 | 0.514 |
| 7 | 0.797 | 0.652 | 0.125 | 0.525 |
| 8 | 0.827 | 0.697 | 0.119 | 0.548 |
| Average | 0.930 | 0.668 | 0.119 | 0.572 |
| S.D. | 0.196 | 0.030 | 0.015 | 0.065 |
| Subject No. | Force | Average | ||
|---|---|---|---|---|
| Light | Moderate | Heavy | ||
| 1 | 0.942 | 0.913 | 0.833 | 0.896 |
| 2 | 0.941 | 0.908 | 0.955 | 0.935 |
| 3 | 0.897 | 0.928 | 0.911 | 0.912 |
| 4 | 0.940 | 0.922 | 0.929 | 0.930 |
| 5 | 0.897 | 0.921 | 0.953 | 0.924 |
| 6 | 0.944 | 0.923 | 0.885 | 0.917 |
| 7 | 0.927 | 0.837 | 0.955 | 0.907 |
| 8 | 0.882 | 0.909 | 0.910 | 0.900 |
| Average | 0.921 | 0.908 | 0.917 | 0.915 |
| S.D. | 0.025 | 0.029 | 0.042 | 0.014 |
| IMF | NRMSE | ||
|---|---|---|---|
| Light | Moderate | Heavy | |
| 1 | 0.045 | 0.025 | 0.027 |
| 2 | 0.077 | 0.023 | 0.025 |
| 3 | 0.119 | 0.084 | 0.085 |
| 4 | 0.130 | 0.105 | 0.115 |
| 5 | 0.121 | 0.069 | 0.088 |
| 6 | 0.106 | 0.012 | 0.060 |
| 7 | 0.113 | 0.091 | 0.104 |
| Subject No. | Force | Average | ||
|---|---|---|---|---|
| Light | Moderate | Heavy | ||
| 1 | 0.100 | 0.085 | 0.067 | 0.084 |
| 2 | 0.047 | 0.064 | 0.063 | 0.058 |
| 3 | 0.054 | 0.082 | 0.058 | 0.064 |
| 4 | 0.067 | 0.055 | 0.070 | 0.064 |
| 5 | 0.048 | 0.065 | 0.052 | 0.055 |
| 6 | 0.069 | 0.054 | 0.060 | 0.061 |
| 7 | 0.057 | 0.066 | 0.066 | 0.063 |
| 8 | 0.059 | 0.087 | 0.077 | 0.074 |
| Average | 0.062 | 0.070 | 0.064 | 0.065 |
| S.D. | 0.017 | 0.013 | 0.008 | 0.009 |
| Subject No. | Force | Average | ||
|---|---|---|---|---|
| Light | Moderate | Heavy | ||
| 1 | 0.956 | 0.984 | 0.978 | 0.973 |
| 2 | 0.887 | 0.927 | 0.968 | 0.928 |
| 3 | 0.91 | 0.98 | 0.958 | 0.95 |
| 4 | 0.976 | 0.99 | 0.966 | 0.977 |
| 5 | 0.968 | 0.988 | 0.964 | 0.974 |
| 6 | 0.956 | 0.98 | 0.955 | 0.964 |
| 7 | 0.968 | 0.972 | 0.91 | 0.95 |
| 8 | 0.931 | 0.939 | 0.966 | 0.945 |
| Average | 0.944 | 0.97 | 0.958 | 0.958 |
| S.D. | 0.0317 | 0.0237 | 0.0206 | 0.0172 |
| Pressure | ||||
|---|---|---|---|---|
| Light | Moderate | Heavy | All | |
| NRMSE | 0.000 | 0.000 | 0.000 | 0.000 |
| R-SQUARED | 0.134 | 0.000 | 0.025 | 0.000 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hsieh, T.-C.; Wu, C.-M.; Tsai, C.-C.; Lo, W.-C.; Wang, Y.-M.; Smith, S. Portable Interactive Pulse Tactile Recorder and Player System. Sensors 2021, 21, 4339. https://doi.org/10.3390/s21134339
Hsieh T-C, Wu C-M, Tsai C-C, Lo W-C, Wang Y-M, Smith S. Portable Interactive Pulse Tactile Recorder and Player System. Sensors. 2021; 21(13):4339. https://doi.org/10.3390/s21134339
Chicago/Turabian StyleHsieh, Tzu-Chieh, Chien-Min Wu, Cheng-Chung Tsai, Wen-Chien Lo, Yu-Min Wang, and Shana Smith. 2021. "Portable Interactive Pulse Tactile Recorder and Player System" Sensors 21, no. 13: 4339. https://doi.org/10.3390/s21134339
APA StyleHsieh, T. -C., Wu, C. -M., Tsai, C. -C., Lo, W. -C., Wang, Y. -M., & Smith, S. (2021). Portable Interactive Pulse Tactile Recorder and Player System. Sensors, 21(13), 4339. https://doi.org/10.3390/s21134339