
An Interoperable Communication Framework for Grid Frequency Regulation Support from Microgrids



Abstract
:1. Introduction

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Ref | Study Area | Main Objective | Communication Structure | |||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Planning Optimization Algorithm | Design Communication Structure | MG Interaction with Main Grid | Communication Network | Interoperability | Implementation Platform | Time Constraint Investigation | Communication Security Investigation | |||
| IEC 61850 Information Model | IEC 61850 Message Format | |||||||||
| [31] 2016 | YES | YES | Multi-agent based MG control system | YES | LAN | Referred but not proposed | NO | Real LAN testbed | YES | NO |
| [25] 2017 | YES | YES | Real-time microgrid EMS | YES | LAN | NO | NO | Real LAN testbed | NO | NO |
| [27] 2018 | YES | YES | Voltage regulation in active distribution network | YES | LAN | NO | NO | Real LAN testbed | YES | NO |
| [26] 2019 | YES | YES | Multiagent market for multi-MG system | YES | LAN | NO | NO | Real LAN testbed | NO | NO |
| [28] 2019 | NO | YES | Communication structure for control voltage and frequency of MG | NO | LAN | NO | NO | Real LAN testbed | NO | NO |
| [29] 2019 | YES | YES | MG protection | NO | LAN | Referred but not proposed | IEC 61850-1 | Real LAN testbed | YES | NO |
| [12] 2020 | YES | NO | MG stability provision to act as ancillary service provider of main grid | YES | NO | NO | NO | NO | NO | NO |
| [13] 2020 | YES | NO | MG as active distribution network offering frequency regulation service provider of main grid | YES | NO | NO | NO | NO | NO | NO |
| [30] 2020 | NO | YES | MG protection | NO | LAN | Referred but not proposed | IEC 61850-1 | Real LAN testbed | YES | NO |
| [34] 2021 | YES | NO | MG as a participant of power grid protection schema | YES | NO | NO | NO | NO | NO | NO |
| [32] 2021 | NO | YES | communication structure for LFC in an islanded MG | NO | WAN (simulated environment) | YES | IEC 61850-1 (LAN) | Real LAN testbed and simulated WAN | YES | NO |
| [33] 2021 | YES | YES | communication structure for a fault detection and system restoration in the Multi-MG system | YES | LAN | YES | IEC 61850-1 | Ethernet based HIL | YES | NO |
| Present Work | YES | YES | Interoperable communication structure for MG as main grid ancillary service provider | YES | WAN (main grid) LAN (inside MG) | YES | IEC 61850-1 (LAN) IEC 61850-2 (WAN) | Real WAN/LAN testbed | YES | YES |
- Define information model of MG elements and service requirements based on IEC 61850 standard in the utility grid FR-support scenario.
- Provide experimental setup of communication infrastructure based on the DDS protocol in the WAN environment.
- Investigate results according to the FR communication requirements fulfillment.
2. Scenario Arrangement for MG Participation in Power System FR
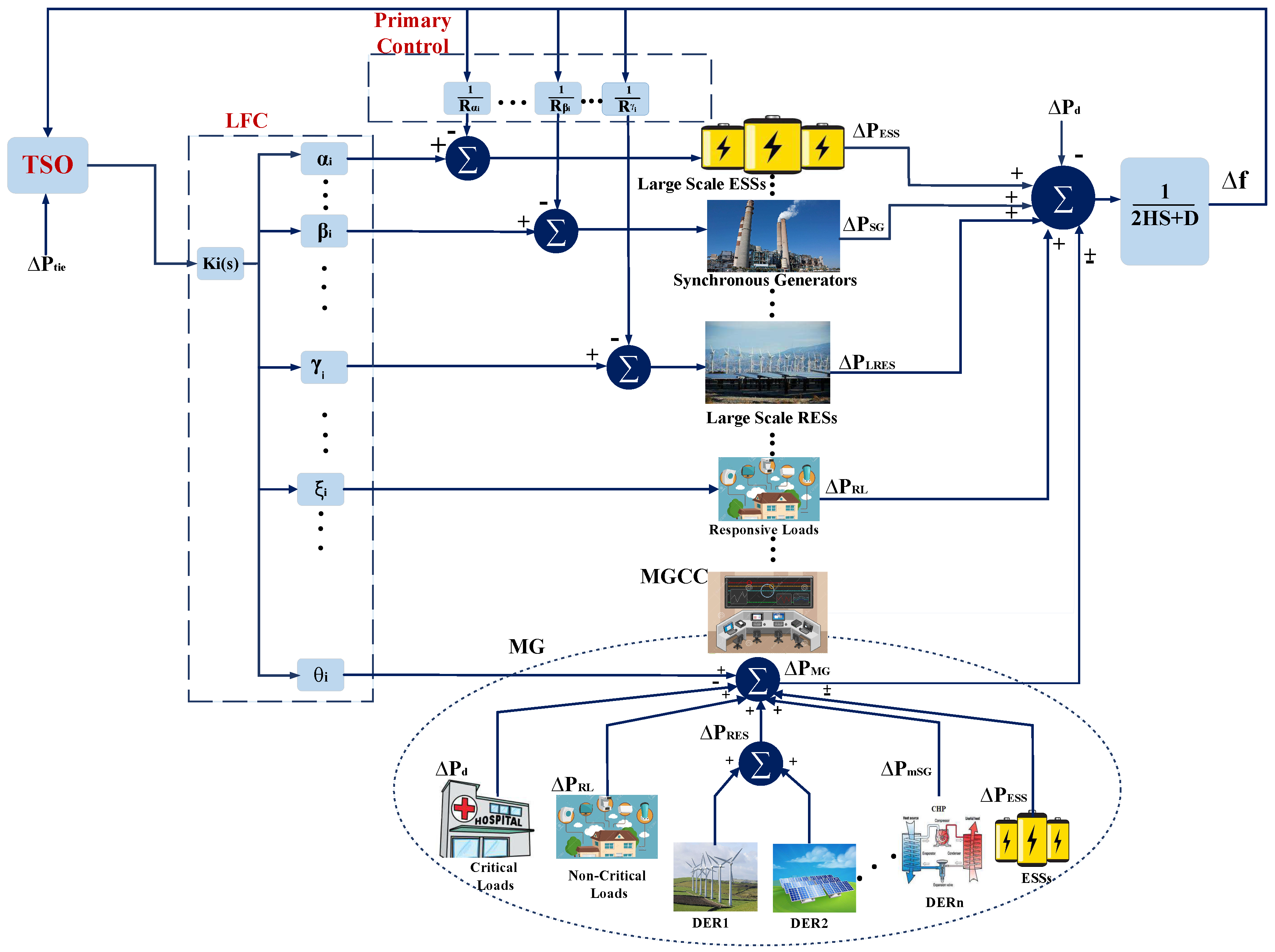
2.1. Power System FR with the MG Presence
- : deviation in power generated by SG;
- : deviation in power delivered or consumed by large scale ESS;
- : deviation in power generated by large sclae RES;
- : deviation in the power demanded by RL;
- : deviation in power delivered or consumed by MG;
- : disturbances in loads power demand;
- H: system inertia provided by synchronous generators;
- D: power system damping coefficient.
- : deviation in power generated by RES in MG domain;
- : deviation in power generated by microsynchronous generators in MG domain;
- : deviation in power delivered or consumed by ESS in MG domain;
- : deviation in the power demanded by RL in MG domain;
- : disturbances in loads power demand in MG domain.
- i: number of actors in the FR;
- : participation factor of ESS in FR;
- : participation factor of SG in FR;
- : participation factor of LRES in FR;
- : participation factor of RL in FR.
- : participation factor of MG in FR.
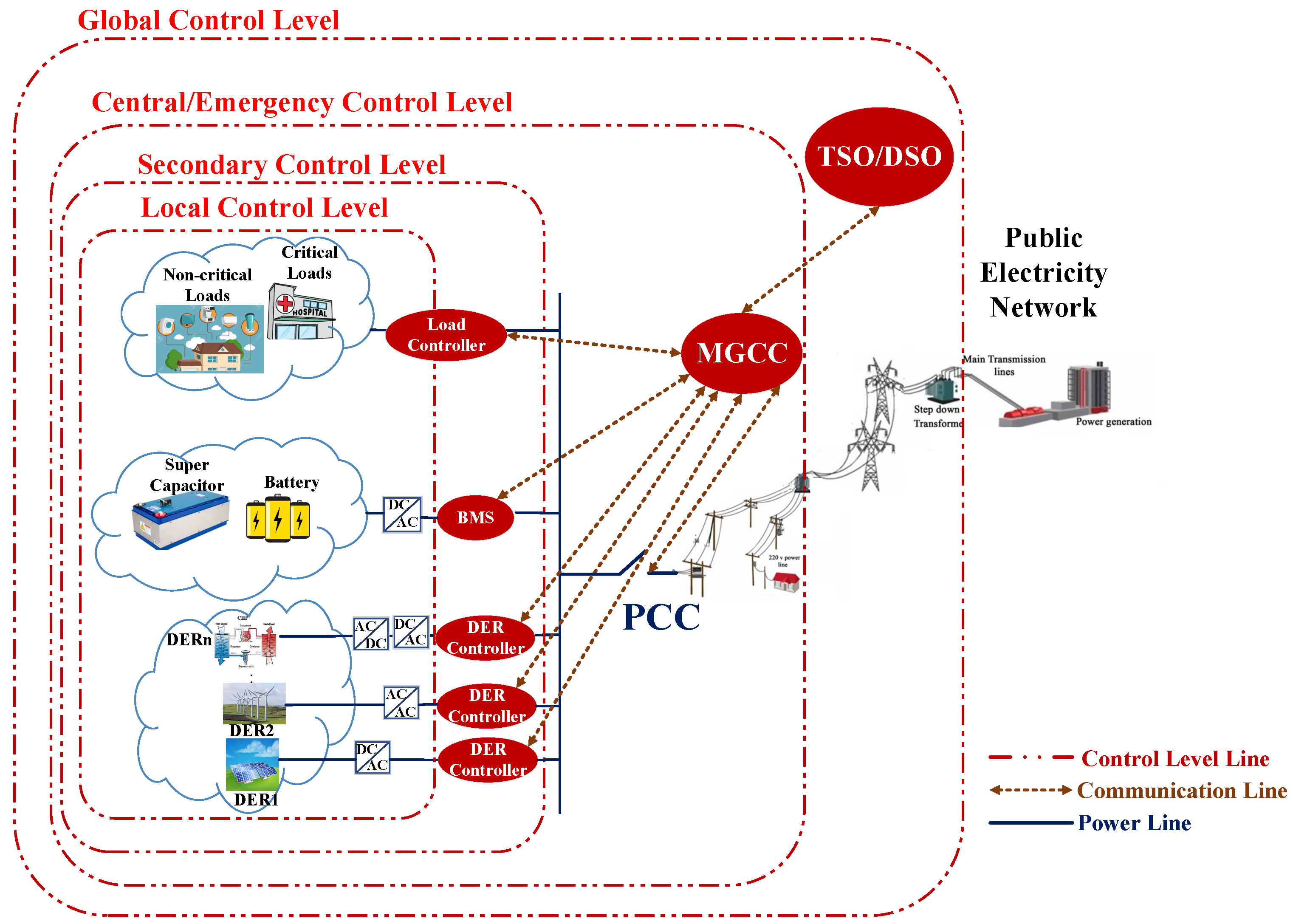
2.2. MG Structure and Control Methodologies
| Algorithm 1: Interoperable algorithm for contribution of the MG in the utility grid FR based on IEC 61850. |
 |
3. The Proposed Communication Framework
3.1. Information Model Based on IEC 61850
3.2. Service Mapping Requirements Based on DDS
4. Experimental Investigations
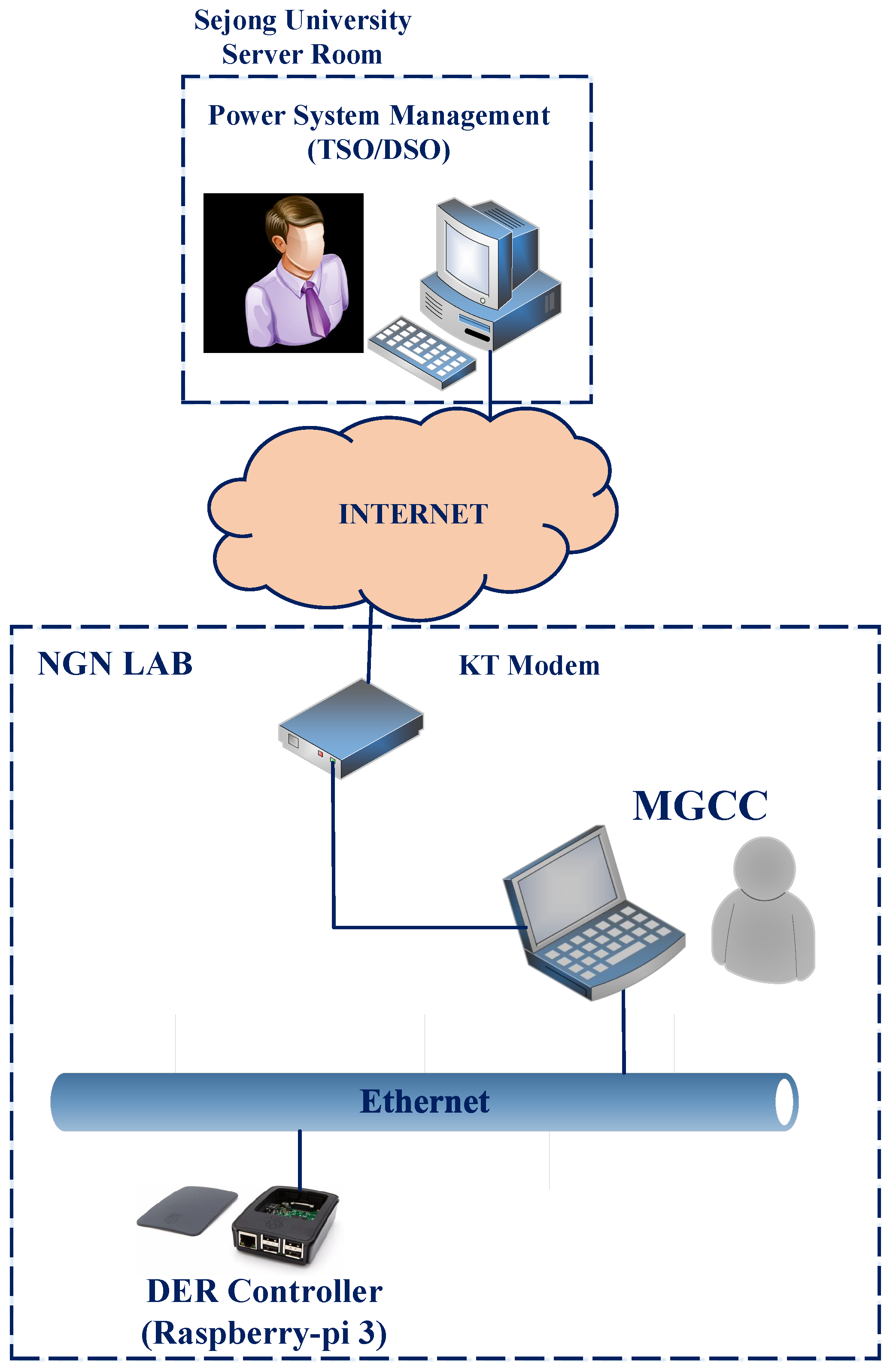
4.1. Experimental Setup
4.2. Experimental Results Investigation
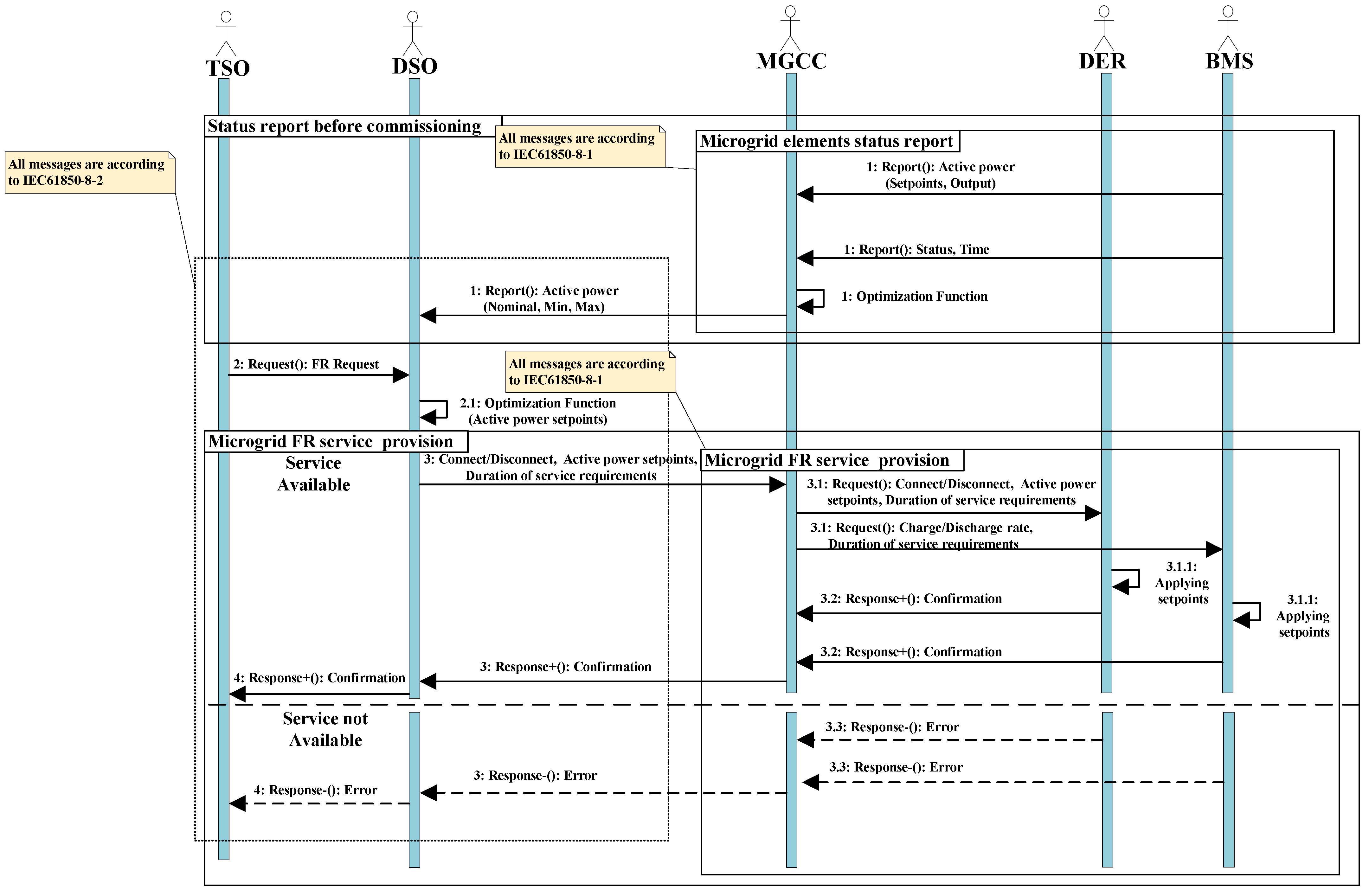
- T1: time when DSO receives FR request from TSO;
- T2: DSO optimization function time period;
- T3: time when MGCC receives output power set point from DSO;
- T4: time when DER receives output power set point from MGCC;
- T5: time when BMS receives output power set point from MGCC;
- T6: smart inverter ramp rate;
- T7: time when the BMS send confirmation message to the MGCC;
- T8: time when the DER send confirmation message to the MGCC;
- T9: time when the MGCC send confirmation message to the DSO;
- T10: time when the DSO send confirmation message to the TSO.
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
Nomenclatures
| Participation factor of ESS in FR | |
| Participation factor of SG in FR | |
| Participation factor of LRES in FR | |
| Participation factor of RL in FR | |
| Participation factor of MG in FR | |
| i | Number of actors in the FR |
| D | Power system damping coefficient |
| H | System inertia provided by synchronous generators |
| Load power demand | |
| Power delivered or consumed by ESS in the MG domain | |
| Power delivered or consumed by large scale ESS | |
| Power delivered by large scale RES | |
| Power delivered or consumed by the MG | |
| Power delivered by micro-SG in the MG domain | |
| Power delivered by RES in the MG domain | |
| Power demanded by RL in the MG domain | |
| Power generated by SG |
Abbreviations
| ACL | Agent Communication Language |
| ADN | Active Distribution Network |
| AGC | Automatic Generation Control |
| AS | Ancillary Service |
| BMS | Battery Management System |
| DDS | Data Distribution Services |
| DER | Distributed Energy Resources |
| DSO | Distribution System Operator |
| EMS | Energy Management System |
| ENTSO | European Network of Transmission System Operators |
| ESS | Energy Storage Systems |
| FR | Frequency Regulation |
| GOOSE | Generic Object Oriented Substation Event |
| IED | Intelligent Electronic Devices |
| KT | Korean Telecommunication |
| LAN | Local Area Network |
| LESS | Large Scale Energy Storage Systems |
| LFC | Load Frequency Control |
| LRES | Large Scale Renewable Energy Sources |
| MAS | Multi-Agent System |
| MG | Microgrid |
| MGCC | Microgrid central controller |
| micro-SG | micro-Synchronous Generators |
| NGN | Next-Generation Network |
| OMG | Object Management Group |
| QoS | Quality of Services |
| RES | Renewable Energy Sources |
| RL | Responsive Loads |
| SG | Synchronous Generators |
| SISCO | Systems Integration Specialists Company |
| SMV | Sampled Measured Values Messages |
| TSO | Transmission System Operator |
| WAN | Wide-Area Network |
| XML | eXtensible Markup Language |
References
- Lasseter, R.H.; Paigi, P. Microgrid: A conceptual solution. In Proceedings of the IEEE 35th Annual Power Electronics Specialists Conference, Aachen, Germany, 20–25 June 2004; Volume 6, pp. 4285–4290. [Google Scholar]
- IEEE Standard for the Specification of Micro Grid Controllers. IEEE 2018, 1–43. [CrossRef]
- Bizon, N.; Hoarcă, I.C. Hydrogen saving through optimized control of both fueling flows of the Fuel Cell Hybrid Power System under a variable load demand and an unknown renewable power profile. Energy Convers. Manag. 2019, 184, 1–14. [Google Scholar] [CrossRef]
- Hirsch, A.; Parag, Y.; Guerrero, J. Microgrids: A review of technologies, key drivers, and outstanding issues. Renew. Sustain. Energy Rev. 2018, 90, 402–411. [Google Scholar] [CrossRef]
- Chiou, F.; Gentle, J.P.; McJunkin, T.R. Dispatchable renewable energy model for microgrid power system. In Proceedings of the IEEE Conference on Technologies for Sustainability, Phoenix, AZ, USA, 9–11 October 2016; pp. 195–199. [Google Scholar]
- Xue, Y.; Guerrero, J.M. Smart inverters for utility and industry applications. In Proceedings of the International Exhibition and Conference for Power Electronics, Intelligent Motion, Renewable Energy and Energy Management, Nuremberg, Germany, 19–20 May 2015; pp. 1–8. [Google Scholar]
- Zhao, X.; Chang, L.; Shao, R.; Spence, K. Power system support functions provided by smart inverters—A review. CPSS Trans. Power Electron. Appl. 2018, 3, 25–35. [Google Scholar] [CrossRef]
- Arbab-Zavar, B.; Palacios-Garcia, E.J.; Vasquez, J.C.; Guerrero, J.M. Smart Inverters for Microgrid Applications: A Review. Energies 2019, 12, 840. [Google Scholar] [CrossRef] [Green Version]
- Liu, Q.; Caldognetto, T.; Buso, S. Review and Comparison of Grid-Tied Inverter Controllers in Microgrids. IEEE Trans. Power Electron. 2020, 35, 7624–7639. [Google Scholar] [CrossRef]
- Ruiz-Cortés, M.; González-Romera, E.; Amaral-Lopes, R.; Romero-Cadaval, E.; Martins, J.; Milanés-Montero, M.I.; Barrero-González, F. Optimal Charge/Discharge Scheduling of Batteries in Microgrids of Prosumers. IEEE Trans. Energy Convers. 2019, 34, 468–477. [Google Scholar] [CrossRef]
- Wang, J.; Zhong, H.; Tang, W.; Rajagopal, R.; Xia, Q.; Kang, C.; Wang, Y. Optimal bidding strategy for microgrids in joint energy and ancillary service markets considering flexible ramping products. Appl. Energy 2017, 205, 294–303. [Google Scholar] [CrossRef]
- Wu, Y.; Lim, G.J.; Shi, J. Stability-Constrained Microgrid Operation Scheduling Incorporating Frequency Control Reserve. IEEE Trans. Smart Grid 2020, 11, 1007–1017. [Google Scholar] [CrossRef]
- Du, Y.; Li, F. A Hierarchical Real-Time Balancing Market Considering Multi-Microgrids With Distributed Sustainable Resources. IEEE Trans. Sustain. Energy 2020, 11, 72–83. [Google Scholar] [CrossRef]
- Bevrani, H.; Watanabe, M.; Mitani, Y. Power System Monitoring and Control; John Wiley & Sons: Hoboken, NJ, USA, 2014. [Google Scholar]
- Martínez-Ramos, J.L.; Marano-Marcolini, A.; García-López, F.P.; Almagro-Yravedra, F.; Onen, A.; Yoldas, Y.; Khiat, M.; Ghomri, L.; Fragale, N. Provision of Ancillary Services by a Smart Microgrid: An OPF Approach. In Proceedings of the International Conference on Smart Energy Systems and Technologies (SEST), Sevilla, Spain, 10–12 September 2018; pp. 1–6. [Google Scholar]
- Oureilidis, K.; Malamaki, K.N.; Gallos, K.; Tsitsimelis, A.; Dikaiakos, C.; Gkavanoudis, S.; Cvetkovic, M.; Mauricio, J.M.; Maza Ortega, J.M.; Martinez Ramos, J.L.; et al. Ancillary Services Market Design in Distribution Networks: Review and Identification of Barriers. Energies 2020, 13, 917. [Google Scholar] [CrossRef] [Green Version]
- Tightiz, L.; Yang, H. A Comprehensive Review on IoT Protocols’ Features in Smart Grid Communication. Energies 2020, 13, 2762. [Google Scholar] [CrossRef]
- Object models for power converters in distributed energy resources (DER) systems. In IEC61850-90-7; 2013; Available online: https://webstore.iec.ch/preview/info_iec61850-90-7%7Bed1.0%7Den.pdf (accessed on 2 July 2021).
- Communication networks and systems for power utility automation—Part 7-420: Basic communication structure—Distributed energy resources logical nodes. In Document IEC 61850-7-420, 1st ed.; 2009; Available online: https://webstore.iec.ch/preview/info_iec61850-7-420%7Bed1.0%7Den.pdf (accessed on 2 July 2021).
- Specific Communication Service Mapping (SCSM)—Mapping to Extensible Messaging Presence Protocol (XMPP). In IEC61850-8-2; 2018; Available online: https://webstore.iec.ch/preview/info_iec61850-8-2%7Bed1.0%7Db.pdf (accessed on 2 July 2021).
- Mohagheghi, S.; Yang, F. Applications of microgrids in distribution system service restoration. In Proceedings of the ISGT 2011, Anaheim, CA, USA, 17–19 January 2011; pp. 1–7. [Google Scholar]
- Madureira, A.; Lopes, J.P. Ancillary services market framework for voltage control in distribution networks with microgrids. Electr. Power Syst. Res. 2012, 86, 1–7. [Google Scholar] [CrossRef] [Green Version]
- Majzoobi, A.; Khodaei, A. Application of microgrids in providing ancillary services to the utility grid. Energy 2017, 123, 555–563. [Google Scholar] [CrossRef]
- Shi, K.; Bi, Y.; Jiang, L. Middleware-based implementation of smart micro-grid monitoring using data distribution service over IP networks. In Proceedings of the 2014 49th International Universities Power Engineering Conference (UPEC), Cluj-Napoca, Romania, 2–5 September 2014; pp. 1–5. [Google Scholar]
- Youssef, T.A.; El Hariri, M.; Elsayed, A.T.; Mohammed, O.A. A DDS-based energy management framework for small microgrid operation and control. IEEE Trans. Ind. Inform. 2017, 14, 958–968. [Google Scholar] [CrossRef]
- Esfahani, M.M.; Hariri, A.; Mohammed, O.A. A Multiagent-Based Game-Theoretic and Optimization Approach for Market Operation of Multimicrogrid Systems. IEEE Trans. Ind. Inform. 2019, 15, 280–292. [Google Scholar] [CrossRef]
- Saxena, S.; El-Taweel, N.A.; Farag, H.E.; Hilaire, L.S. Design and Field Implementation of a Multi-Agent System for Voltage Regulation Using Smart Inverters and Data Distribution Service (DDS). In Proceedings of the 2018 IEEE Electrical Power and Energy Conference (EPEC), Toronto, ON, Canada, 10–11 October 2018; pp. 1–6. [Google Scholar]
- Starke, M.; Herron, A.; King, D.; Xue, Y. Implementation of a Publish-Subscribe Protocol in Microgrid Islanding and Resynchronization With Self-Discovery. IEEE Trans. Smart Grid 2019, 10, 361–370. [Google Scholar] [CrossRef]
- Habib, H.F.; Esfahani, M.M.; Mohammed, O.A. Investigation of Protection Strategy for Microgrid System Using Lithium-Ion Battery During Islanding. IEEE Trans. Ind. Appl. 2019, 55, 3411–3420. [Google Scholar] [CrossRef]
- Habib, H.F.; Fawzy, N.; Esfahani, M.M.; Mohammed, O.A.; Brahma, S. An Enhancement of Protection Strategy for Distribution Network Using the Communication Protocols. IEEE Trans. Ind. Appl. 2020, 56, 1240–1249. [Google Scholar] [CrossRef]
- Cintuglu, M.H.; Youssef, T.; Mohammed, O.A. Development and application of a real-time testbed for multiagent system interoperability: A case study on hierarchical microgrid control. IEEE Trans. Smart Grid 2016, 9, 1759–1768. [Google Scholar] [CrossRef]
- Aftab, M.A.; Hussain, S.S.; Latif, A.; Das, D.C.; Ustun, T.S. IEC 61850 communication based dual stage load frequency controller for isolated hybrid microgrid. Int. J. Electr. Power Energy Syst. 2021, 130, 106909. [Google Scholar] [CrossRef]
- Hong, J.; Ishchenko, D.; Kondabathini, A. Implementation of Resilient Self-Healing Microgrids with IEC 61850-Based Communications. Energies 2021, 14, 547. [Google Scholar] [CrossRef]
- Tightiz, L.; Yang, H. Resilience Microgrid as Power System Integrity Protection Scheme Element With Reinforcement Learning Based Management. IEEE Access 2021, 9, 83963–83975. [Google Scholar] [CrossRef]
- Bevrani, H.; Ghosh, A.; Ledwich, G. Renewable energy sources and frequency regulation: Survey and new perspectives. IET Renew. Power Gener. 2010, 4, 438–457. [Google Scholar] [CrossRef] [Green Version]
- Bevrani, H. Robust Power System Frequency Control, 2nd ed.; Springer: New York, NY, USA, 2014. [Google Scholar]
- Kolenc, M.; Ihle, N.; Gutschi, C.; Nemček, P.; Breitkreuz, T.; Goedderz, K.; Suljanović, N.; Zajc, M. Virtual power plant architecture using OpenADR 2.0 b for dynamic charging of automated guided vehicles. Int. J. Electr. Power Energy Syst. 2019, 104, 370–382. [Google Scholar] [CrossRef]
- IEEE Standard for Interconnecting Distributed Resources with Electric Power Systems. IEEE 2003, 1–28. [CrossRef]
- IEEE Standard for Interconnection and Interoperability of Distributed Energy Resources with Associated Electric Power Systems Interfaces. IEEE 2018, 1–138. [CrossRef]
- Tightiz, L.; Yang, H.; Piran, M.J. A Survey on Enhanced Smart Micro-Grid Management System with Modern Wireless Technology Contribution. Energies 2020, 13, 2258. [Google Scholar] [CrossRef]
- Bevrani, H.; Franï, B.; Ise, T. Microgrid Dynamics and Control; John Wiley & Sons: Hoboken, NJ, USA, 2017. [Google Scholar]
- Communication networks and systems for power utility automation—Part 1: Introduction and overview. In Document IEC 61850-1, 2nd ed.; 2013; Available online: https://webstore.iec.ch/preview/info_iec61850-1%7Bed2.0%7Db.pdf (accessed on 2 July 2021).
- OpenDDS Developer’s Guide, OpenDDS Version 3.13; Supported by Object Computing, Inc. (OCI): St. Louis, MO, USA, 2018.
- DDSSecurity Version 1.1; Object Management Group (O M G): Needham, MA, USA, 2018.





| Control Level | ||
|---|---|---|
| Primary Control | 1–2 s | 15–30 s |
| Secondary Control | 1–5 s | 5–15 min |
| Tertiary Control | 1 min | 15 min |
| Step | Interaction | IEC 61850–90–7 Function | Parameters | LN | Service | |||||
|---|---|---|---|---|---|---|---|---|---|---|
| Sender | Receiver | Name | D.O. | CDC | FC | D.A. | ||||
| 1 | DER Controller | MGCC | DS93 | Active Power Set point | DRCT | MaxWLim | ASG | SP | setMag | Report |
| Active Power Output | MMXU | TotW | MV | MX | mag | |||||
| Status | ZINV(PV) | GridModSt | ENS | ST | stVal,q,t | |||||
| ZINV(ESS) | GridModSt | ENS | ST | stVal,q,t | ||||||
| DRCS | CHaSt | ENS | ST | stVal,q,t | ||||||
| VAPct | MV | MX | mag | |||||||
| VAChaPct | q t | |||||||||
| Time | DPST | OpTms | INS | ST | stVal,q,t | |||||
| MGCC | DSO | DS93 | Nominal, Min and Max of Active Power | DOPR | ECPNomWRtg | ASG | SP | setMag | ||
| CF | minVal | |||||||||
| maxVal | ||||||||||
| Status | DPST | ECPConn | SPS | ST | stVal,q,t | |||||
| CSWI | POS | DPC | ST | stVal,q,t | ||||||
| MMXU | TotW | MV | MX | mag,q,t | ||||||
| 3 | DSO | MGCC | INV1 | Connect/Disconnect | CSWI | POS | DPC | ST | ctlVal | Operate |
| stVal,q,t | Report | |||||||||
| Duration of Service Requirements | DOPM | RvrTms | ING | SP | setVal | SetDataValue-Request&Response | ||||
| WinTms | ||||||||||
| RmpTms | ||||||||||
| INV2 | Active Power Set point | DRCT | WMaxLimPct | ASG | SP | setMag | ||||
| Duration of Service Requirements | DOPM | RvrTms | ING | SP | setVal | |||||
| WinTms | ||||||||||
| RmpTms | ||||||||||
| 3.1, 3.2, 3.3 | MGCC | DER Controller | INV1 | Connect/Disconnect | CSWI | POS | DPC | ST | ctlVal | Operate |
| stVal,q,t | Report | |||||||||
| Duration of Service Requirements | DOPM | RvrTms | ING | SP | setVal | SetDataValue-Request&Response | ||||
| WinTms | ||||||||||
| RmpTms | ||||||||||
| INV2 | Active Power Setpoint | DRCT | WMaxLimPct | ASG | SP | setMag | ||||
| Duration of Service Requirements | DOPM | RvrTms | ING | SP | setVal | |||||
| WinTms | ||||||||||
| RmpTms | ||||||||||
| INV4 | Duration of Service Requirements | DOPM | RvrTms | ING | SP | setVal | ||||
| WinTms | ||||||||||
| RmpTms | ||||||||||
| Set Charge/Discharge Rate | DRCT | OutWRte | ASG | SP | setMag | |||||
| DOPM | OpModExlm | SPC | ST | ctlVal | Select | |||||
| stVal,q,t | Report | |||||||||
| Role in FR Scenario | Host Equipment | Hardware Specification | Software Specification | |||
|---|---|---|---|---|---|---|
| RAM | SSD | Processor | OS | Gateway Protocol | ||
| DSO | PC | 32 GB | 256 GB | Intel(R) Xeon(R) CPU @ 2.60 GHz | Ubuntu 16.04.6 LTS | DDS Client: 1OpenDDS-3.13 |
| MGCC | Laptop | 7.8 GB | 256 GB | Intel (R) Core (TM) i7 CPU @ 2.50 GHz | Ubuntu 16.04.6 LTS | DDS Server:OpenDDS-3.13 IEC 61850 Client:mmslite V6.3 |
| DER Controller | Raspberry-pi3 | 1 GB | microSDXC 64 GB | Broadcom BCM2837B0, Cortex-A53 64-bit SoC @ 1.4 GHz | Raspbian GNU/ Linux10 | IEC 61850 Server:mmslite V6.3 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tightiz, L.; Yang, H.; Bevrani, H. An Interoperable Communication Framework for Grid Frequency Regulation Support from Microgrids. Sensors 2021, 21, 4555. https://doi.org/10.3390/s21134555
Tightiz L, Yang H, Bevrani H. An Interoperable Communication Framework for Grid Frequency Regulation Support from Microgrids. Sensors. 2021; 21(13):4555. https://doi.org/10.3390/s21134555
Chicago/Turabian StyleTightiz, Lilia, Hyosik Yang, and Hassan Bevrani. 2021. "An Interoperable Communication Framework for Grid Frequency Regulation Support from Microgrids" Sensors 21, no. 13: 4555. https://doi.org/10.3390/s21134555
APA StyleTightiz, L., Yang, H., & Bevrani, H. (2021). An Interoperable Communication Framework for Grid Frequency Regulation Support from Microgrids. Sensors, 21(13), 4555. https://doi.org/10.3390/s21134555