
Histogram Adjustment of Images for Improving Photogrammetric Reconstruction


Abstract
:1. Introduction
2. Materials and Methods
2.1. Research Method
2.2. Photo Improvement Methods
2.2.1. Histogram Stretching (HS)
| Algorithm 1: Histogram modification in L*a*b* space |
| Input: —image in RGB space 1 convert into ; 2 divide into separate channels; 3 leave and channels without any changes; 4 transform channel to the [0 1] range; 5 perform certain histogram operation on channel; 6 transform back channel to the [0 100] range; 7 combine from separate channels; 8 convert into ; 9 return —modified image in RGB space; |
2.2.2. Histogram Equalizing (HE)
2.2.3. Adaptive Histogram Equalizing (AHE)
2.2.4. Exact Histogram Matching (EHM)
2.3. Photogrammetric Reconstruction
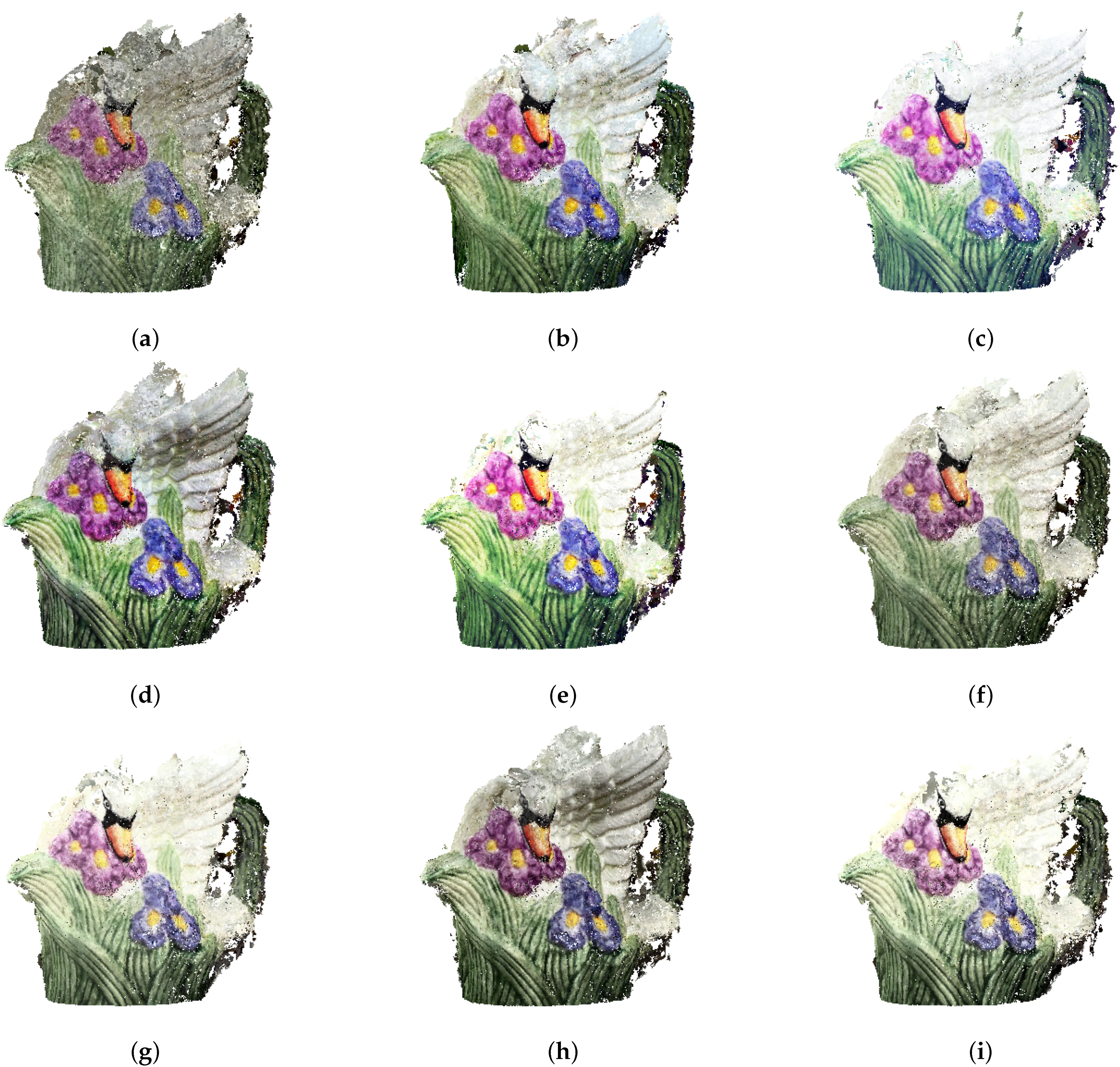
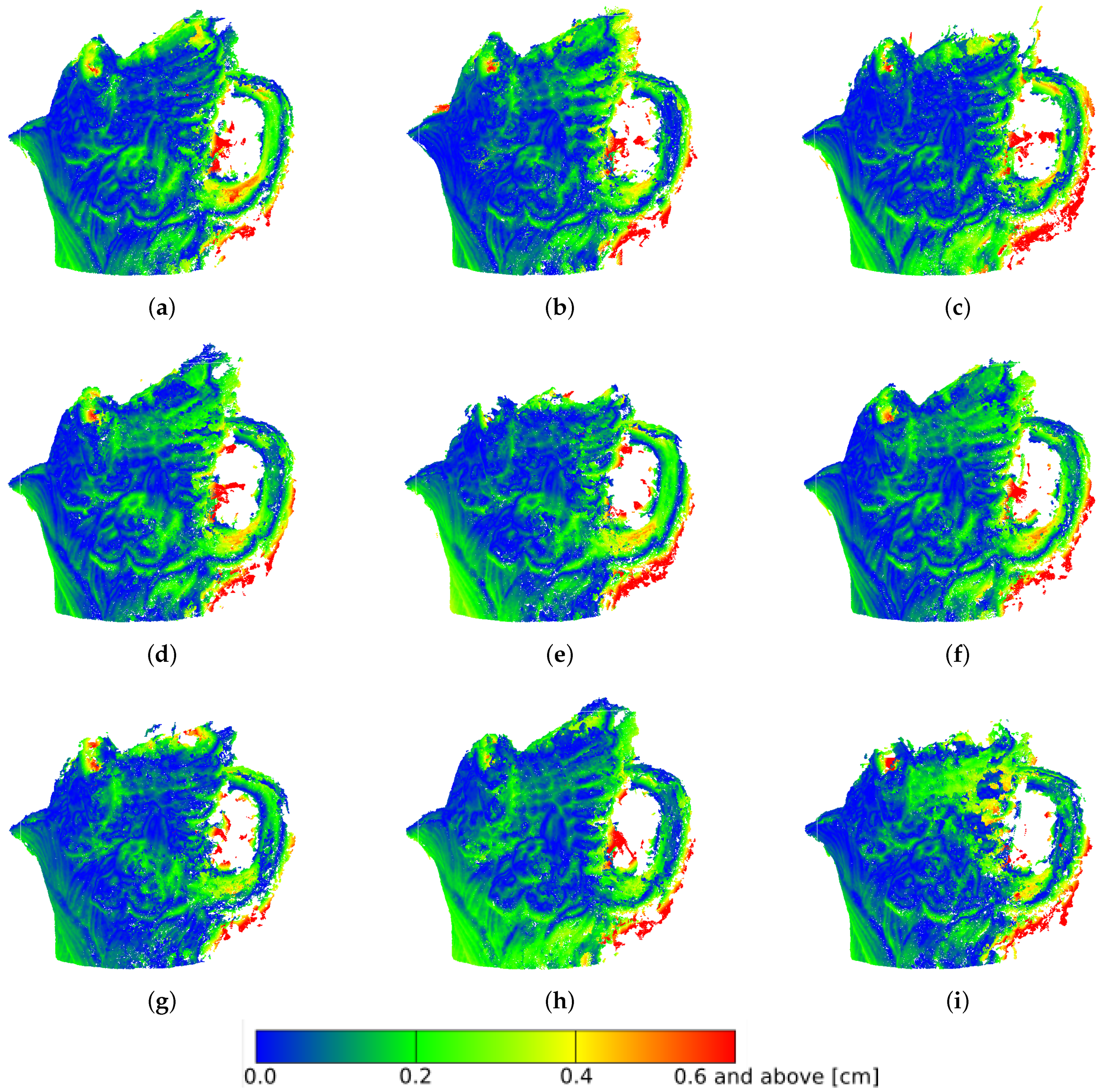
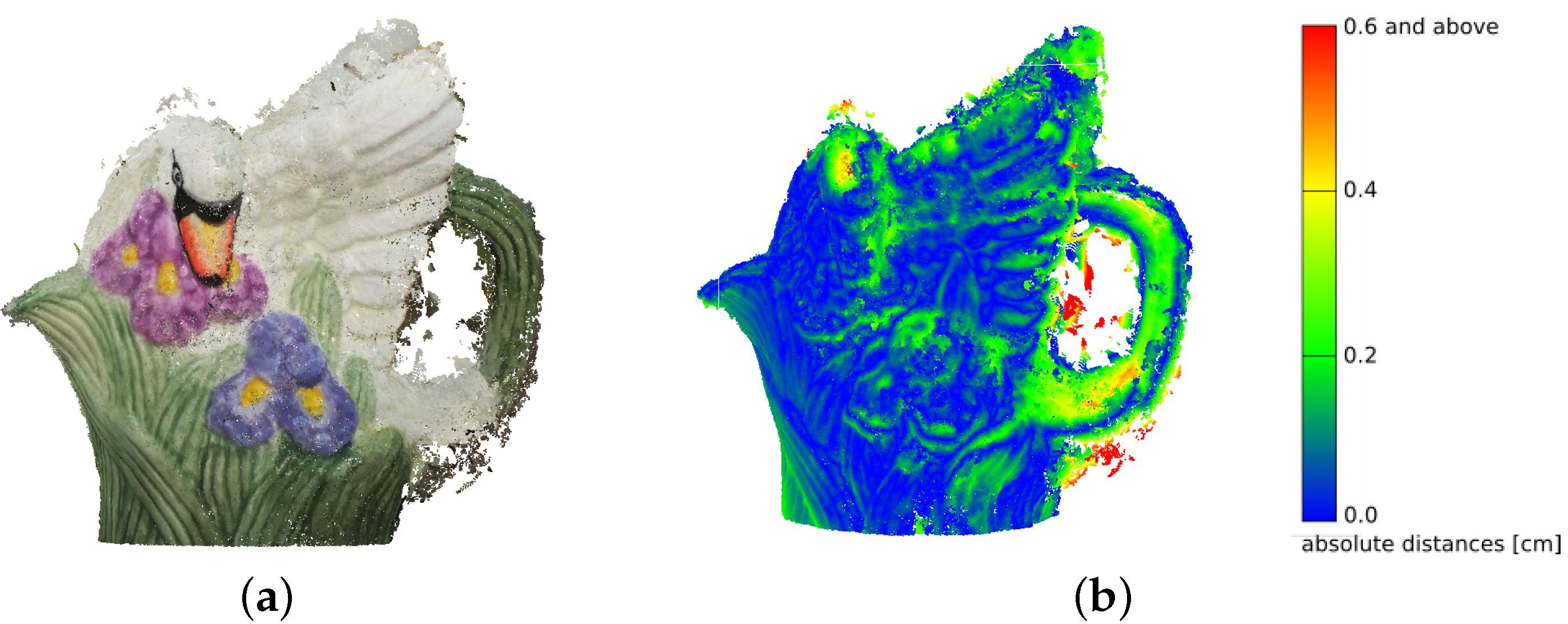
2.3.1. Reference Model of the Porcelain Figurine
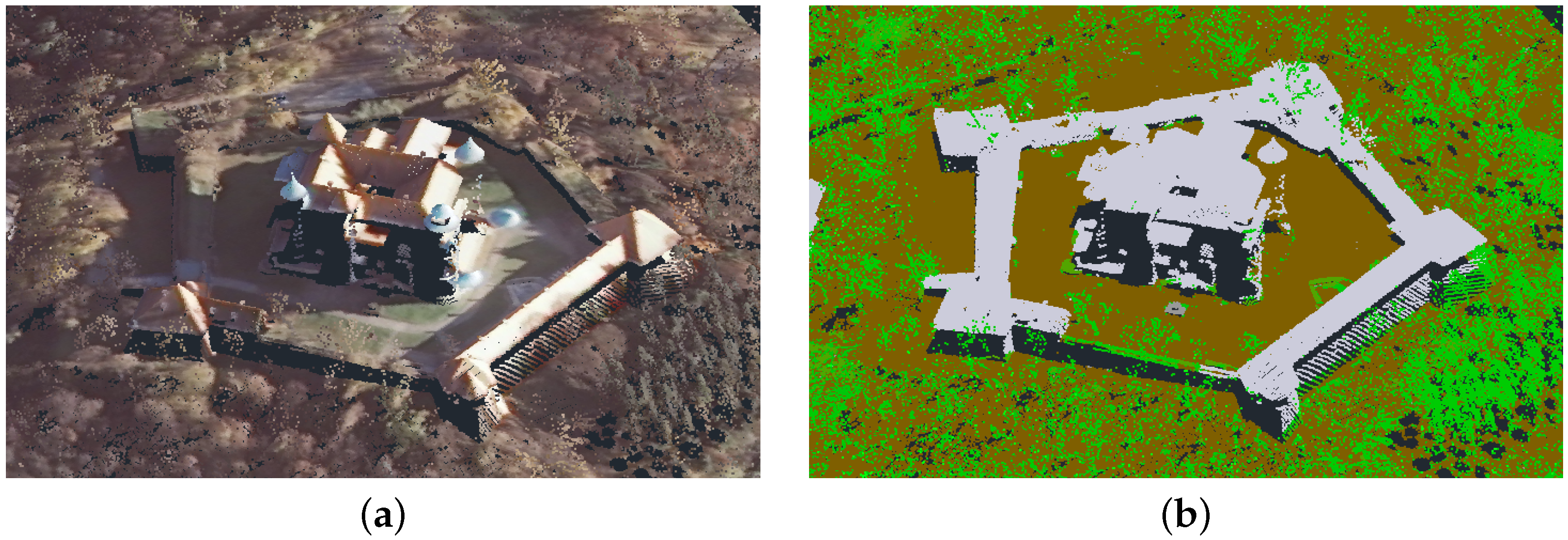
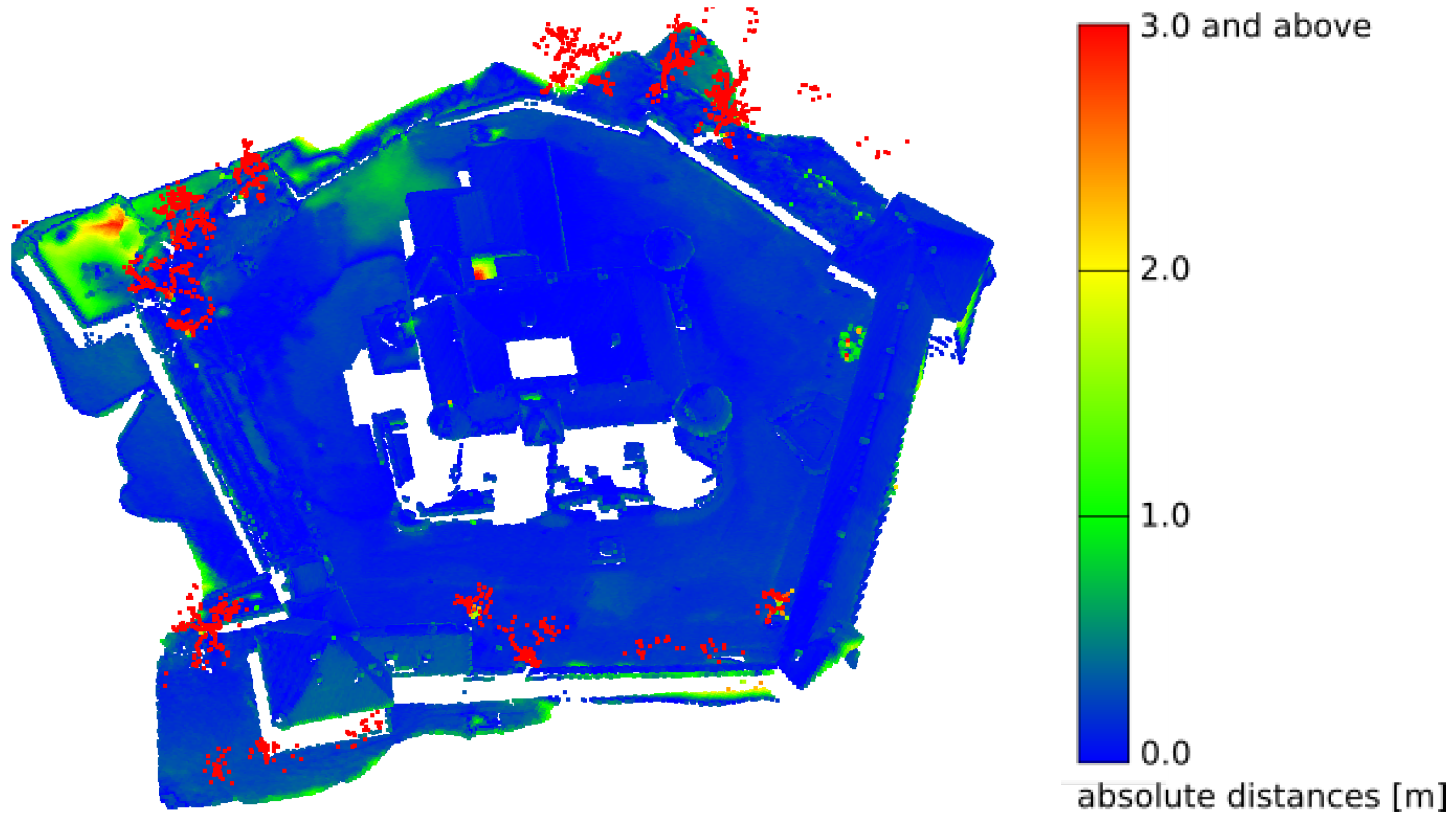
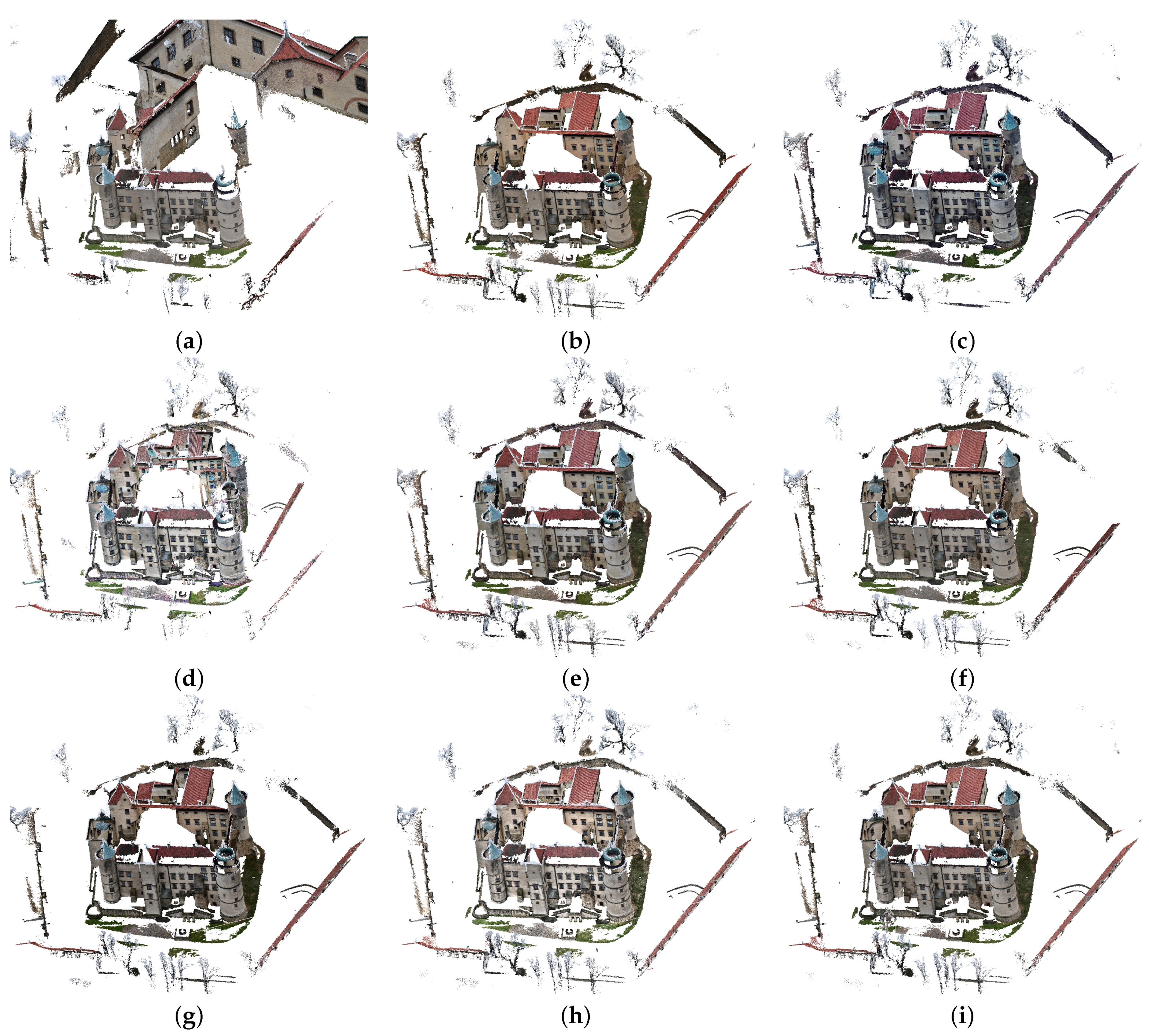
2.3.2. Reference Model of the Castle in Nowy Wiśnicz
3. Results
- Photo correction using one of the methods mentioned.
- Creation of a sparse and then dense point cloud by photogrammetric reconstruction.
- Registration using the ICP method to match the received data sets [52].
- Comparison of individual reconstructions using the distance calculation: reconstructed model cloud to reference model cloud.
- Statistical and visual analysis of the obtained results.
3.1. Case Study 1—The Porcelain Figurine
3.2. Case Study 2—The Castle in Nowy Wiśnicz
4. Discussion and Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| HS | histogram stretching |
| HE | histogram equalizing |
| AHE | adaptive histogram equalizing |
| EHM | exact histogram matching |
| CLAHE | contrast-limited adaptive histogram equalization |
| UAV | Unmanned Aerial Vehicle |
| LiDAR | Light Detection and Ranging |
| ISOK | IT System of the Country Protection |
| RMS | Root Mean Square |
| ICP | Iterative Closest Point |
| IQR | interquartile range |
References
- Di Angelo, L.; Di Stefano, P.; Guardiani, E.; Morabito, A.E. A 3D Informational Database for Automatic Archiving of Archaeological Pottery Finds. Sensors 2021, 21, 978. [Google Scholar] [CrossRef]
- Apollonio, F.I.; Fantini, F.; Garagnani, S.; Gaiani, M. A Photogrammetry-Based Workflow for the Accurate 3D Construction and Visualization of Museums Assets. Remote Sens. 2021, 13, 486. [Google Scholar] [CrossRef]
- Nocerino, E.; Poiesi, F.; Locher, A.; Tefera, Y.T.; Remondino, F.; Chippendale, P.; Gool, L.V. 3D Reconstruction with a Collaborative Approach Based on Smartphones and a Cloud-Based Server. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2017, 42, 187–194. [Google Scholar] [CrossRef] [Green Version]
- Javadnejad, F.; Slocum, R.K.; Gillins, D.T.; Olsen, M.J.; Parrish, C.E. Dense Point Cloud Quality Factor as Proxy for Accuracy Assessment of Image-Based 3D Reconstruction. J. Surv. Eng. 2021, 147, 04020021. [Google Scholar] [CrossRef]
- Osello, A.; Lucibello, G.; Morgagni, F. HBIM and Virtual Tools: A New Chance to Preserve Architectural Heritage. Buildings 2018, 8, 12. [Google Scholar] [CrossRef] [Green Version]
- Carnevali, L.; Lanfranchi, F.; Russo, M. Built Information Modeling for the 3D Reconstruction of Modern Railway Stations. Heritage 2019, 2, 2298–2310. [Google Scholar] [CrossRef] [Green Version]
- Croce, V.; Caroti, G.; De Luca, L.; Jacquot, K.; Piemonte, A.; Véron, P. From the Semantic Point Cloud to Heritage-Building Information Modeling: A Semiautomatic Approach Exploiting Machine Learning. Remote Sens. 2021, 13, 461. [Google Scholar] [CrossRef]
- Chan, T.O.; Xia, L.; Chen, Y.; Lang, W.; Chen, T.; Sun, Y.; Wang, J.; Li, Q.; Du, R. Symmetry Analysis of Oriental Polygonal Pagodas Using 3D Point Clouds for Cultural Heritage. Sensors 2021, 21, 1228. [Google Scholar] [CrossRef]
- Moyano, J.; Nieto-Julián, J.E.; Bienvenido-Huertas, D.; Marín-García, D. Validation of Close-Range Photogrammetry for Architectural and Archaeological Heritage: Analysis of Point Density and 3D Mesh Geometry. Remote Sens. 2020, 12, 3571. [Google Scholar] [CrossRef]
- Surový, P.; Yoshimoto, A.; Panagiotidis, D. Accuracy of Reconstruction of the Tree Stem Surface Using Terrestrial Close-Range Photogrammetry. Remote Sens. 2016, 8, 123. [Google Scholar] [CrossRef] [Green Version]
- Klein, L.; Li, N.; Becerik-Gerber, B. Imaged-based verification of as-built documentation of operational buildings. Autom. Constr. 2012, 21, 161–171. [Google Scholar] [CrossRef]
- Li, Y.; Wu, B. Relation-Constrained 3D Reconstruction of Buildings in Metropolitan Areas from Photogrammetric Point Clouds. Remote Sens. 2021, 13, 129. [Google Scholar] [CrossRef]
- Aldeeb, N.H. Analyzing and Improving Image-Based 3D Surface Reconstruction Challenged by Weak Texture or Low Illumination. Ph.D. Thesis, Technical University of Berlin, Berlin, Germany, 2020. [Google Scholar]
- Yang, J.; Liu, L.; Xu, J.; Wang, Y.; Deng, F. Efficient global color correction for large-scale multiple-view images in three-dimensional reconstruction. ISPRS J. Photogramm. Remote Sens. 2021, 173, 209–220. [Google Scholar] [CrossRef]
- Xiao, Z.; Liang, J.; Yu, D.; Asundi, A. Large field-of-view deformation measurement for transmission tower based on close-range photogrammetry. Measurement 2011, 44, 1705–1712. [Google Scholar] [CrossRef]
- Remondino, F.; Spera, M.G.; Nocerino, E.; Menna, F.; Nex, F. State of the art in high density image matching. Photogramm. Rec. 2014, 29, 144–166. [Google Scholar] [CrossRef] [Green Version]
- Skabek, K.; Tomaka, A. Comparison of photogrammetric techniques for surface reconstruction from images to reconstruction from laser scanning. Theor. Appl. Inform. 2014, 26, 161–178. [Google Scholar]
- Dikovski, B.; Lameski, P.; Zdravevski, E.; Kulakov, A. Structure from motion obtained from low qualityimages in indoor environment, Conference Paper. In Proceedings of the 10th Conference for Informatics and Information Technology (CIIT 2013); Faculty of Computer Science and Engineering (FCSE): Mumbai, India, 2013. [Google Scholar]
- Alfio, V.S.; Costantino, D.; Pepe, M. Influence of Image TIFF Format and JPEG Compression Level in the Accuracy of the 3D Model and Quality of the Orthophoto in UAV Photogrammetry. J. Imaging 2020, 6, 30. [Google Scholar] [CrossRef]
- Pierrot-Deseilligny, M.; de Luca, L.; Remondino, F. Automated image-based procedures for accurate artifacts 3D modeling and orthoimage generation. Geoinform. FCE CTU J. 2011, 6, 291–299. [Google Scholar] [CrossRef]
- Remondino, F.; Del Pizzo, S.; Kersten, T.P.; Troisi, S. Low-cost and open-source solutions for automated image orientation—A critical overview. In Progress in Cultural Heritage Preservation. In Proceedings of the 4th International Conference, EuroMed 2012, Lemessos, Cyprus, 29 October–3 November 2012; pp. 40–54. [Google Scholar]
- Snavely, N.; Seitz, S.M.; Szeliski, R. Modeling the world from internet photo collections. Int. J. Comput. Vis. 2008, 80, 189–210. [Google Scholar] [CrossRef] [Green Version]
- Barazzetti, L.; Scaioni, M.; Remondino, F. Orientation and 3D modeling from markerless terrestrial images: Combining accuracy with automation. Photogramm. Rec. 2010, 25, 356–381. [Google Scholar] [CrossRef]
- Gonzalez, R.F.; Woods, R. Digital Image Preprocessing; Prentice Hall: Upper Saddle River, NJ, USA, 2007. [Google Scholar]
- Guidi, G.; Gonizzi, S.; Micoli, L.L. Image pre-processing for optimizing automated photogrammetry performances. ISPRS Int. Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2014, II-5, 145–152. [Google Scholar] [CrossRef] [Green Version]
- Maini, R.; Aggarwal, H. A comprehensive review of image enhancement techniques. J. Comput. 2010, 2, 8–13. [Google Scholar]
- Klein, G.; Murray, D. Improving the agility of keyframe-based SLAM. In Proceedings of the 10th ECCV Conference, Marseille, France, 12–18 October 2008; pp. 802–815. [Google Scholar]
- Lee, H.S.; Kwon, J.; Lee, K.M. Simultaneous localization, mapping and deblurring. In Proceedings of the IEEE ICCV Conference, Barcelona, Spain, 6–13 November 2011; pp. 1203–1210. [Google Scholar]
- Burdziakowski, P. A Novel Method for the Deblurring of Photogrammetric Images Using Conditional Generative Adversarial Networks. Remote Sens. 2020, 12, 2586. [Google Scholar] [CrossRef]
- Verhoeven, G.; Karel, W.; Štuhec, S.; Doneus, M.; Trinks, I.; Pfeifer, N. Mind your gray tones—Examining the influence of decolourization methods on interest point extraction and matching for architectural image-based modelling. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2015, XL-5/W4, 307–314. [Google Scholar] [CrossRef] [Green Version]
- Ballabeni, A.; Gaiani, M. Intensity histogram equalisation, a colour-to-grey conversion strategy improving photogrammetric reconstruction of urban architectural heritage. J. Int. Colour Assoc. 2016, 16, 2–23. [Google Scholar]
- Gaiani, M.; Remondino, F.; Apollonio, F.I.; Ballabeni, A. An Advanced Pre-Processing Pipeline to Improve Automated Photogrammetric Reconstructions of Architectural Scenes. Remote Sens. 2016, 8, 178. [Google Scholar] [CrossRef] [Green Version]
- Feng, C.; Yu, D.; Liang, Y.; Guo, D.; Wang, Q.; Cui, X. Assessment of Influence of Image Processing On Fully Automatic Uav Photogrammetry. ISPRS Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2019, XLII-2/W13, 269–275. [Google Scholar] [CrossRef] [Green Version]
- Pashaei, M.; Starek, M.J.; Kamangir, H.; Berryhill, J. Deep Learning-Based Single Image Super-Resolution: An Investigation for Dense Scene Reconstruction with UAS Photogrammetry. Remote Sens. 2020, 12, 1757. [Google Scholar] [CrossRef]
- Eastwood, J.; Zhang, H.; Isa, M.; Sims-Waterhouse, D.; Leach, R.K.; Piano, S. Smart photogrammetry for three-dimensional shape measurement. In Proceedings of the Optics and Photonics for Advanced Dimensional Metrology, Online Only. France, 6–10 April 2020; SPIE: Bellingham, WA, USA, 2020; Volume 11352, p. 113520A. [Google Scholar]
- Alidoost, F.; Arefi, H.; Tombari, F. 2D Image-To-3D Model: Knowledge-Based 3D Building Reconstruction (3DBR) Using Single Aerial Images and Convolutional Neural Networks (CNNs). Remote Sens. 2019, 11, 2219. [Google Scholar] [CrossRef] [Green Version]
- Skabek, K.; Łabędź, P.; Ozimek, P. Improvement and unification of input images for photogrammetric reconstruction. Comput. Assist. Methods Eng. Sci. 2019, 26, 153–162. [Google Scholar]
- Petrou, M.; Petrou, C. Image Processing; The Fundamentals: Wiley, UK, 2010. [Google Scholar]
- Pizer, S.M.; Amburn, E.P.; Austin, J.D.; Cromartie, R.; Geselowitz, A.; Greer, T.; Romeny, B.H.; Zimmerman, J.B.; Zuiderveld, K. Adaptive Histogram Equalization and Its Variations. Comput. Vis. Graph. Image Process. 1987, 39, 355–368. [Google Scholar] [CrossRef]
- Zuiderveld, K. Contrast limited adaptive histogram equalization. In Graphics Gems IV; Heckbert, P., Ed.; Academic Press: Cambridge, MA, USA, 1994; pp. 474–485. [Google Scholar]
- Coltuc, D.; Bolon, P.; Chassery, J.-M. Exact histogram specification. IEEE Trans. Image Process. 2006, 15, 1143–1152. [Google Scholar] [CrossRef] [PubMed]
- Semechko, A. Exact Histogram Equalization and Specification. Available online: https://www.github.com/AntonSemechko/exact_histogram (accessed on 7 July 2020).
- Agisoft LLC. Agisoft Metashape (Version 1.6.3); Agisoft LLC: Saint Petersburg, Russia, 2020. [Google Scholar]
- The Castle in Wisnicz. Available online: http://zamekwisnicz.pl/zamek-w-wisniczu-2/?lang=en (accessed on 4 March 2021).
- Prawo geodezyjne i kartograficzne z dnia 17 maja 1989 r., Dz. U. 1989 Nr 30 poz. 163, art. 40a ust. 2 pkt.1. Available online: https://isap.sejm.gov.pl/isap.nsf/DocDetails.xsp?id=WDU19890300163 (accessed on 25 March 2021).
- Geoportal Krajowy. Available online: https://mapy.geoportal.gov.pl/imap/Imgp_2.html (accessed on 25 March 2021).
- LAS Specification 1.4—R14. The American Society for Photogrammetry & Remote Sensing. Available online: http://www.asprs.org/wp-content/uploads/2019/03/LAS_1_4_r14.pdf (accessed on 26 March 2021).
- Informatyczny System Osłony Kraju. 2012. Available online: http://www.isok.gov.pl/en/about-the-project (accessed on 25 March 2021).
- Orlof, J.; Ozimek, P.; Łabędź, P.; Widłak, A.; Nytko, M. Determination of Radial Segmentation of Point Clouds Using K-D Trees with the Algorithm Rejecting Subtrees. Symmetry 2019, 39, 1451. [Google Scholar] [CrossRef] [Green Version]
- Chen, J.; Yi, J.S.K.; Kahoush, M.; Cho, E.S.; Cho, Y.K. Point Cloud Scene Completion of Obstructed Building Facades with Generative Adversarial Inpainting. Sensors 2020, 20, 5029. [Google Scholar] [CrossRef] [PubMed]
- Ozimek, A.; Ozimek, P.; Skabek, K.; Łabędź, P. Digital Modelling and Accuracy Verification of a ComplexArchitectural Object Based on Photogrammetric Reconstruction. Buildings 2021, 11, 206. [Google Scholar] [CrossRef]
- McKay, N.D.; Besl, J. A method for registration of 3-D shapes. IEEE Trans. Pattern Anal. Mach. Intell. 1992, 14, 239–256. [Google Scholar]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | Aligned Cams | Points | Q1 | Median | Q3 | IQR | |
|---|---|---|---|---|---|---|---|
| original | 24 | 350,232 | 0.05 | 0.11 | 0.19 | 0.23 | |
| L*a*b* | AHE | 23 | 365,903 | 0.05 | 0.12 | 0.20 | 0.23 |
| EHM | 23 | 300,097 | 0.05 | 0.10 | 0.19 | 0.19 | |
| HE | 24 | 313,622 | 0.05 | 0.10 | 0.17 | 0.20 | |
| HS | 27 | 338,858 | 0.05 | 0.11 | 0.19 | 0.21 | |
| RGB | AHE | 23 | 337,649 | 0.05 | 0.11 | 0.19 | 0.21 |
| EHM | 23 | 280,334 | 0.05 | 0.11 | 0.20 | 0.21 | |
| HE | 23 | 316,222 | 0.05 | 0.11 | 0.20 | 0.20 | |
| HS | 27 | 373,312 | 0.05 | 0.12 | 0.22 | 0.23 | |
| avg: | 0.20 |
| Method | [%] | [%] | [%] | ||||
|---|---|---|---|---|---|---|---|
| original | 81,949 | 23.40 | 16,829 | 4.81 | 4232 | 1.21 | |
| L*a*b* | AHE | 92,521 | 25.29 | 12,898 | 3.52 | 4756 | 1.30 |
| EHM | 69,061 | 23.01 | 14,381 | 4.79 | 3695 | 1.23 | |
| HE | 55,938 | 17.84 | 11,367 | 3.62 | 3165 | 1.01 | |
| HS | 76,199 | 22.49 | 13,910 | 4.10 | 3846 | 1.13 | |
| RGB | AHE | 78,988 | 23.39 | 15,156 | 4.49 | 4268 | 1.26 |
| EHM | 69,099 | 24.65 | 13,064 | 4.66 | 4015 | 1.43 | |
| HE | 79,759 | 25.22 | 18,559 | 5.87 | 6565 | 2.08 | |
| HS | 106,967 | 28.65 | 26,207 | 7.02 | 4564 | 1.22 |
| Method | Aligned Cams | Points | Q1 | Median | Q3 | IQR | |
|---|---|---|---|---|---|---|---|
| original | 338 | 41,833,893 | 11.78 | 47.73 | 87.30 | 75.90 | |
| L*a*b* | AHE | 338 | 30,328,057 | 0.05 | 0.10 | 0.17 | 0.19 |
| EHM | 338 | 31,144,627 | 0.04 | 0.10 | 0.19 | 0.20 | |
| HE | 338 | 28,241,790 | 0.05 | 0.10 | 0.17 | 0.19 | |
| HS | 338 | 29,980,758 | 0.04 | 0.10 | 0.16 | 0.18 | |
| RGB | AHE | 338 | 30,774,070 | 0.06 | 0.16 | 0.46 | 0.31 |
| EHM | 338 | 30,223,244 | 0.05 | 0.10 | 0.17 | 0.19 | |
| HE | 338 | 30,163,377 | 0.05 | 0.11 | 0.17 | 0.19 | |
| HS | 338 | 31,055,419 | 0.05 | 0.11 | 0.19 | 0.20 | |
| avg: | 0.21 |
| Method | [%] | [%] | [%] | ||||
|---|---|---|---|---|---|---|---|
| original | 37,325,857 | 89.22 | 36,496,517 | 87.24 | 36,157,816 | 86.43 | |
| L*a*b* | AHE | 4,706,784 | 15.52 | 759,082 | 2.50 | 254,641 | 0.84 |
| EHM | 6,477,239 | 20.80 | 1,889,706 | 6.07 | 736,932 | 2.37 | |
| HE | 4,225,890 | 14.96 | 661,988 | 2.34 | 159,952 | 0.57 | |
| HS | 4,372,294 | 14.58 | 764,709 | 2.55 | 258,619 | 0.86 | |
| RGB | AHE | 12,145,976 | 39.47 | 8,087,475 | 26,28 | 7,209,241 | 23.43 |
| EHM | 4,945,613 | 16.36 | 975,302 | 3.23 | 323,573 | 1.07 | |
| HE | 4,659,034 | 15.45 | 799,797 | 2.65 | 261,054 | 0.87 | |
| HS | 6,829,555 | 21.99 | 2,295,160 | 7.39 | 987,314 | 3.18 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Łabędź, P.; Skabek, K.; Ozimek, P.; Nytko, M. Histogram Adjustment of Images for Improving Photogrammetric Reconstruction. Sensors 2021, 21, 4654. https://doi.org/10.3390/s21144654
Łabędź P, Skabek K, Ozimek P, Nytko M. Histogram Adjustment of Images for Improving Photogrammetric Reconstruction. Sensors. 2021; 21(14):4654. https://doi.org/10.3390/s21144654
Chicago/Turabian StyleŁabędź, Piotr, Krzysztof Skabek, Paweł Ozimek, and Mateusz Nytko. 2021. "Histogram Adjustment of Images for Improving Photogrammetric Reconstruction" Sensors 21, no. 14: 4654. https://doi.org/10.3390/s21144654
APA StyleŁabędź, P., Skabek, K., Ozimek, P., & Nytko, M. (2021). Histogram Adjustment of Images for Improving Photogrammetric Reconstruction. Sensors, 21(14), 4654. https://doi.org/10.3390/s21144654