
Jitter Detection and Image Restoration Based on Generative Adversarial Networks in Satellite Images


Abstract
:1. Introduction
- Aiming at detection and compensation of satellite attitude jitter, in this paper, a generative adversarial network architecture is original introduced to automatically learn and correct the deformed scene features from a single remote sensing image suffer from geometric disturbance in the presence of attitude jitter.
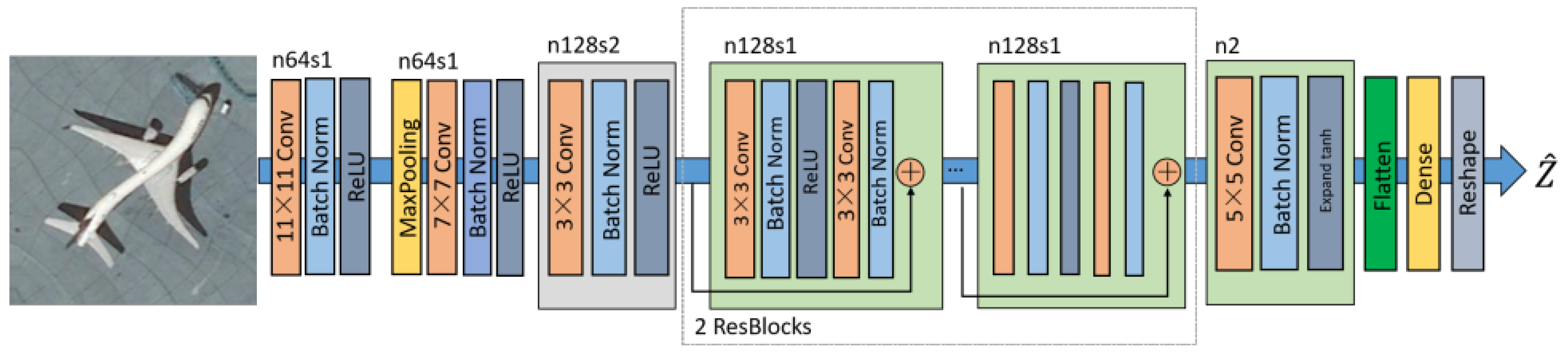
- We proposed a new GAN-based image jitter compensation network (RestoreGAN) for remote sensing images. Compared with the previous architecture, two convolution blocks with large kernels are first applied, which has been proven helpful to learn the HR features and improve network capability. Then, one stride convolution block and two residual blocks with batch ormalization are introduced. The discriminator network of the GAN can be regarded as a regularization method that can force the generator network to learn essential features and mitigate overfitting to a great extent.
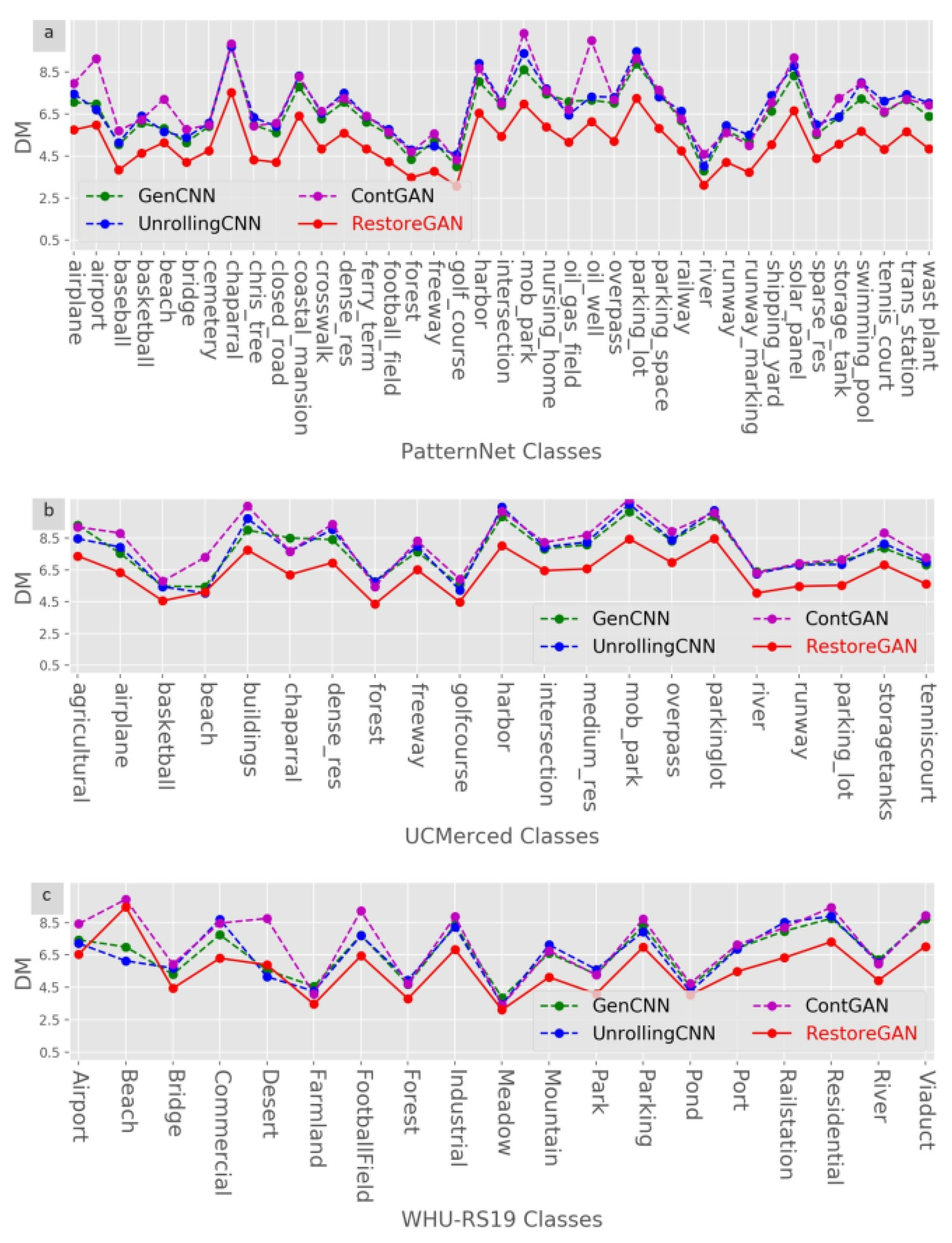
- We constructed a comprehensive and in-depth study on the analysis of attitude jitter from remote sensing images based on generative adversarial network. The experimental results on three public datasets indicate that the proposed framework achieves the highest DM and best performance on most of the restored images. The image retrieval results demonstrate the necessity and effectiveness of the proposed method in image retrieval tasks.
2. Materials and Methods
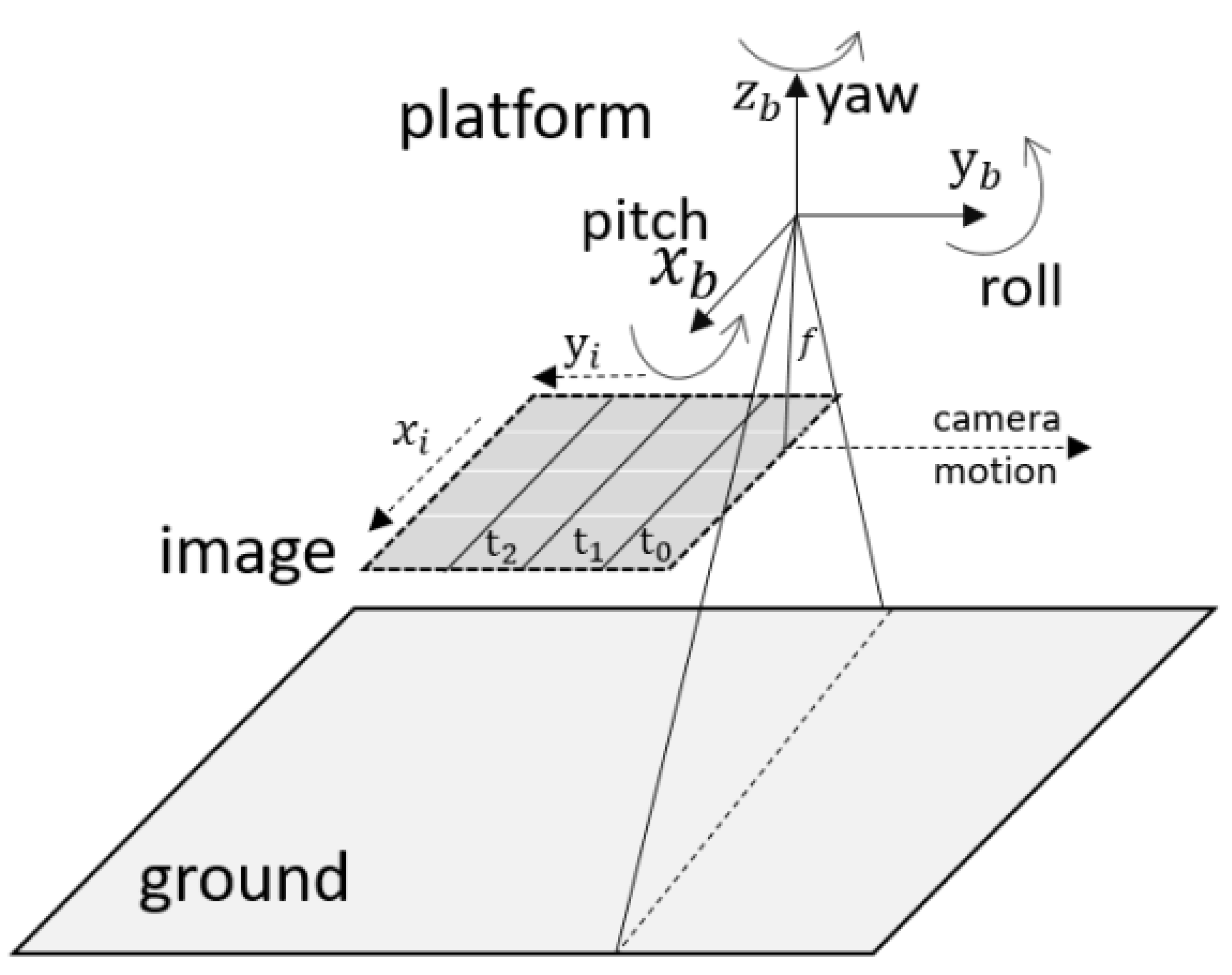
2.1. Jitter Displacement Estimation Modeling
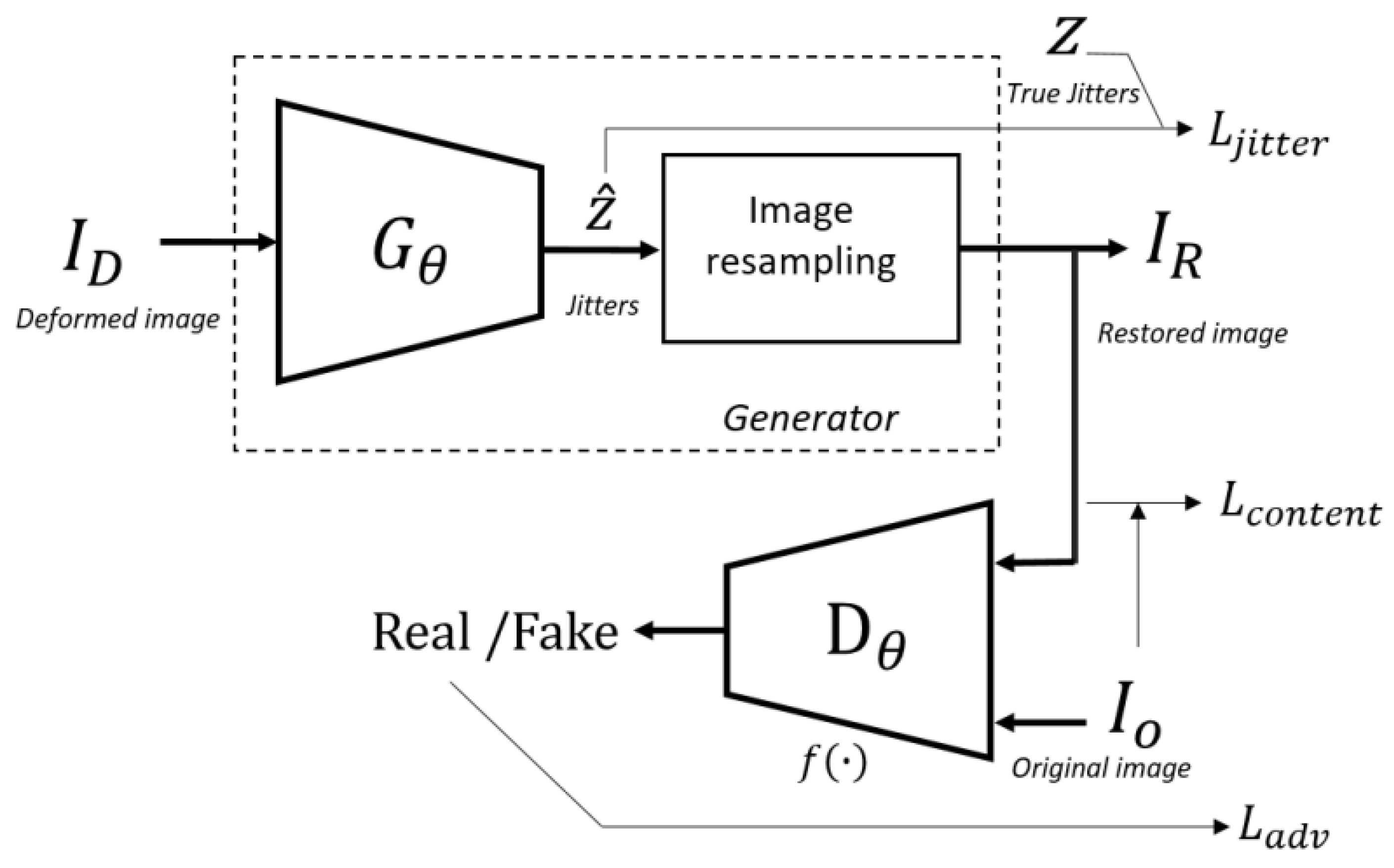
2.2. GAN-Based Jitter Estimation
2.2.1. Adversarial Loss
2.2.2. Content Loss
2.2.3. Jitter Loss
2.3. Image Area Selection
3. Experimental Results and Discussion
3.1. Data Preparation
3.2. Training Details
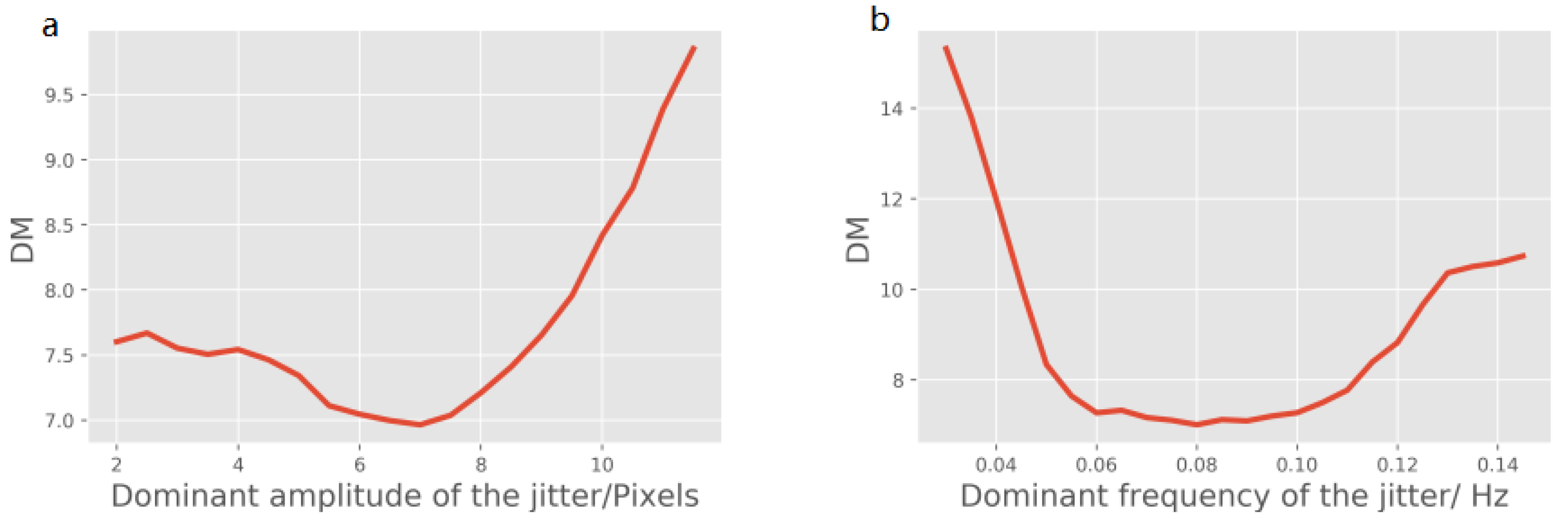
3.3. Results on Different Frequencies and Amplitudes
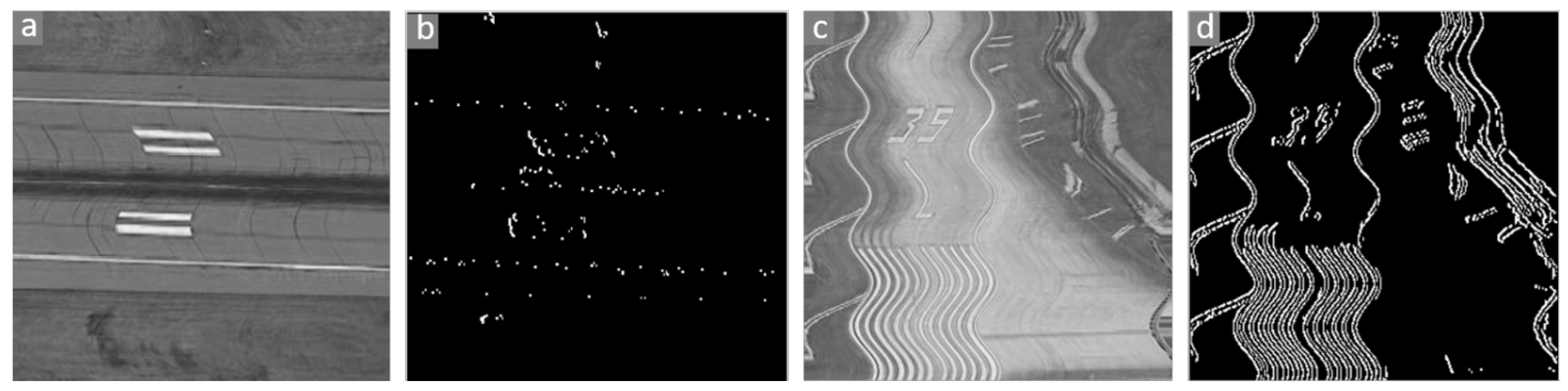
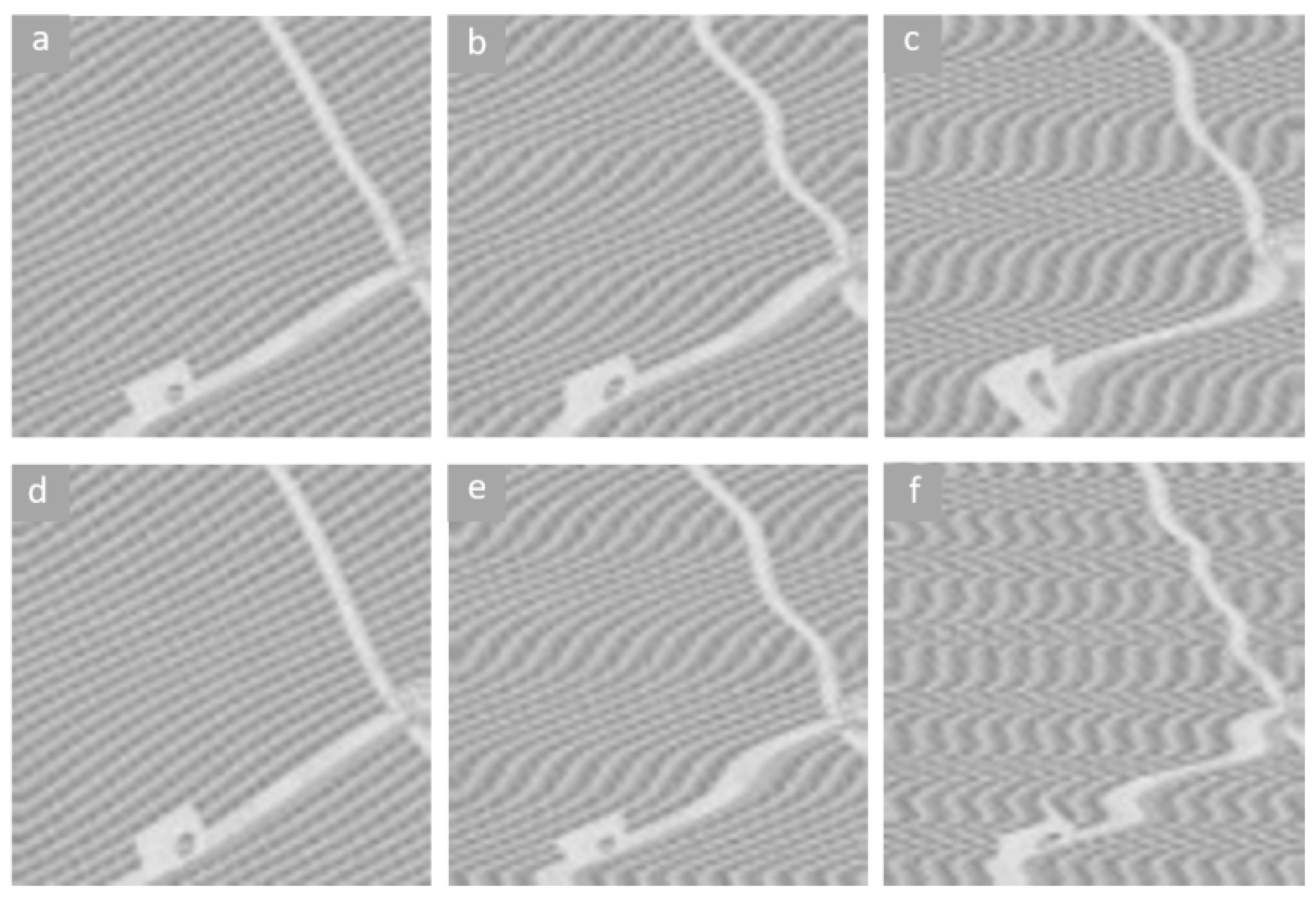
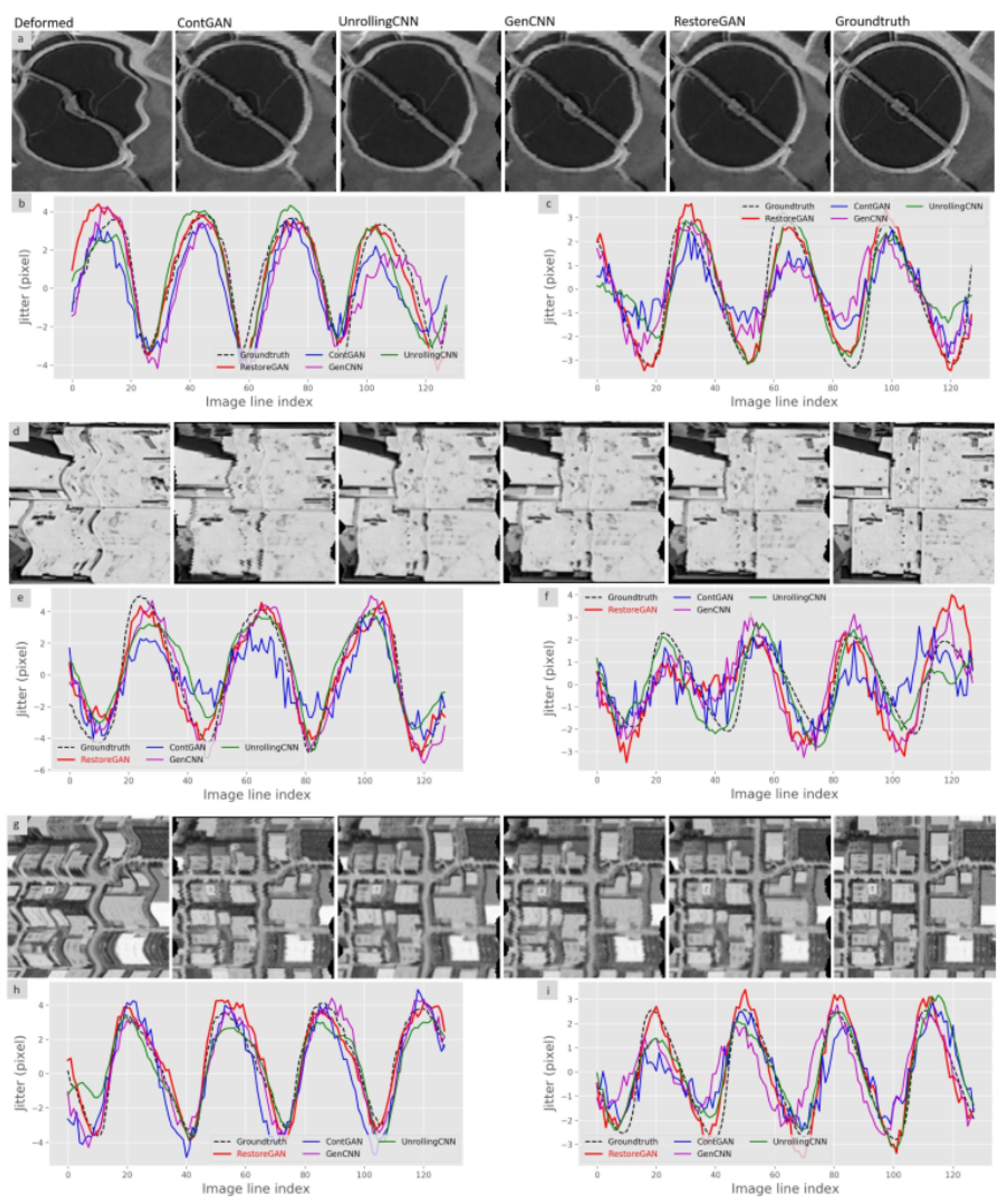
3.4. Image Restoration Experiments
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Liu, H.; Ma, H.; Jiang, Z.; Yan, D. Jitter detection based on parallax observations and attitude data for Chinese Heavenly Palace-1 satellite. Opt. Express 2019, 27, 1099–1123. [Google Scholar] [CrossRef]
- Liu, J.G.; Morgan, G.L.K. FFT selective and adaptive filtering for removal of systematic noise in ETM+ imageodesy images. IEEE Trans. Geosci. Remote Sens. 2006, 44, 3716–3724. [Google Scholar] [CrossRef]
- Teshima, Y.; Iwasaki, A. Correction of attitude fluctuation of Terra spacecraft using ASTER/SWIR imagery with parallax observation. IEEE Trans. Geosci. Remote Sens. 2007, 46, 222–227. [Google Scholar] [CrossRef]
- Iwasaki, A. Detection and estimation satellite attitude jitter using remote sensing imagery. Adv. Spacecr. Technol. 2011, 13, 257–272. [Google Scholar]
- Wang, M.; Zhu, Y.; Jin, S.; Pan, J.; Zhu, Q. Correction of ZY-3 image distortion caused by satellite jitter via virtual steady reimaging using attitude data. ISPRS J. Photogramm. Remote Sens. 2016, 119, 108–123. [Google Scholar] [CrossRef]
- Tong, X.; Ye, Z.; Xu, Y.; Tang, X.; Liu, S.; Li, L.; Xie, H.; Wang, F.; Li, T.; Hong, Z. Framework of jitter detection and compensation for high resolution satellites. Remote Sens. 2014, 6, 3944–3964. [Google Scholar] [CrossRef] [Green Version]
- Wang, M.; Fan, C.; Pan, J.; Jin, S.; Chang, X. Image jitter detection and compensation using a high-frequency angular displacement method for Yaogan-26 remote sensing satellite. ISPRS J. Photogramm. Remote Sens. 2017, 130, 32–43. [Google Scholar] [CrossRef]
- Takaku, J.; Tadono, T. High resolution dsm generation from alos prism-processing status and influence of attitude fluctuation. In Proceedings of the 2010 IEEE International Geoscience and Remote Sensing Symposium, Honolulu, HI, USA, 25–30 July 2010; pp. 4228–4231. [Google Scholar]
- Shin, D.; Pollard, J.K.; Muller, J.P. Accurate geometric correction of ATSR images. IEEE Trans. Geosci. Remote Sens. 1997, 35, 997–1006. [Google Scholar] [CrossRef]
- Delvit, J.M.; Greslou, D.; Amberg, V.; Dechoz, C.; Delussy, F.; Lebegue, L.; Latry, C.; Artigues, S.; Bernard, L. Attitude assessment using Pleiades-HR capabilities. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2012, 39, 525–530. [Google Scholar] [CrossRef] [Green Version]
- Jiang, Y.H.; Zhang, G.; Tang, X.; Li, D.; Huang, W.C. Detection and correction of relative attitude errors for ZY1-02C. IEEE Trans. Geosci. Remote Sens. 2014, 52, 7674–7683. [Google Scholar] [CrossRef]
- Tong, X.; Ye, Z.; Li, L.; Liu, S.; Jin, Y.; Chen, P.; Xie, H.; Zhang, S. Detection and estimation of along-track attitude jitter from Ziyuan-3 three-line-array images based on back-projection residuals. IEEE Trans. Geosci. Remote Sens. 2017, 55, 4272–4284. [Google Scholar] [CrossRef]
- Pan, J.; Che, C.; Zhu, Y.; Wang, M. Satellite jitter estimation and validation using parallax images. Sensors 2017, 17, 83. [Google Scholar] [CrossRef] [Green Version]
- Cao, J.; Fu, J.; Yuan, X.; Gong, J. Nonlinear bias compensation of ZiYuan-3 satellite imagery with cubic splines. ISPRS J. Photogramm. Remote Sens. 2017, 133, 174–185. [Google Scholar] [CrossRef]
- Chen, J.; Yang, J.G.; An, W.; Chen, Z.J. An Attitude Jitter Correction Method for Multispectral Parallax Imagery Based on Compressive Sensing. IEEE Geosci. Remote Sens. Lett. 2017, 14, 1903–1907. [Google Scholar] [CrossRef]
- Zhang, Z.X.; Xu, G.D.; Song, J.N. Observation satellite attitude estimation using sensor measurement and image registration fusion. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2018, 232, 1390–1402. [Google Scholar] [CrossRef]
- Sun, T.; Long, H.; Liu, B.C.; Li, Y. Application of side-oblique image-motion blur correction to Kuaizhou-1 agile optical images. Opt. Express 2016, 24, 6665–6679. [Google Scholar] [CrossRef] [PubMed]
- Fan, M.; Cao, B.; Sunny, A.I.; Li, W.; Tian, G.; Ye, B. Pulsed eddy current thickness measurement using phase features immune to liftoff effect. Ndt & E Int. 2017, 86, 123–131. [Google Scholar]
- Li, W.; Wu, G.; Zhang, F.; Du, Q. Hyperspectral image classification using deep pixel-pair features. IEEE Trans. Geosci. Remote Sens. 2016, 55, 844–853. [Google Scholar] [CrossRef]
- Zi, Y.; Xie, F.; Jiang, Z. A cloud detection method for Landsat 8 images based on PCANet. Remote Sens. 2018, 10, 877. [Google Scholar] [CrossRef] [Green Version]
- Zhou, W.; Newsam, S.; Li, C.; Shao, Z. PatternNet: A benchmark dataset for performance evaluation of remote sensing image retrieval. ISPRS J. Photogramm. Remote Sens. 2018, 145, 197–209. [Google Scholar] [CrossRef] [Green Version]
- Zhang, J.; Zhong, P.; Chen, Y.; Li, S. L_{1/2}-Regularized Deconvolution Network for the Representation and Restoration of Optical Remote Sensing Images. IEEE Trans. Geosci. Remote Sens. 2013, 52, 2617–2627. [Google Scholar] [CrossRef]
- Huang, W.; Xiao, L.; Wei, Z.; Liu, H.; Tang, S. A new pan-sharpening method with deep neural networks. IEEE Geosci. Remote Sens. Lett. 2015, 12, 1037–1041. [Google Scholar] [CrossRef]
- Han, J.; Zhang, D.; Cheng, G.; Guo, L.; Ren, J. Object detection in optical remote sensing images based on weakly supervised learning and high-level feature learning. IEEE Trans. Geosci. Remote Sens. 2014, 53, 3325–3337. [Google Scholar] [CrossRef] [Green Version]
- Zhu, L.; Chen, Y.; Ghamisi, P.; Benediktsson, J.A. Generative adversarial networks for hyperspectral image classification. IEEE Trans. Geosci. Remote Sens. 2018, 56, 5046–5063. [Google Scholar] [CrossRef]
- Liu, Q.; Zhou, H.; Xu, Q.; Liu, X.; Wang, Y. Psgan: A generative adversarial network for remote sensing image pan-sharpening. IEEE Trans. Geosci. Remote Sens. 2020. [Google Scholar] [CrossRef]
- Ao, D.; Dumitru, C.O.; Schwarz, G.; Datcu, M. Dialectical GAN for SAR image translation: From Sentinel-1 to TerraSAR-X. Remote Sens. 2018, 10, 1597. [Google Scholar] [CrossRef] [Green Version]
- Hadar, O.; Fisher, M.; Kopeika, N.S. Image resolution limits resulting from mechanical vibrations. Part III: Numerical calculation of modulation transfer function. Opt. Eng. 1992, 31, 581–589. [Google Scholar] [CrossRef]
- Schwind, P.; Müller, R.; Palubinskas, G.; Storch, T. An in-depth simulation of EnMAP acquisition geometry. ISPRS J. Photogramm. Remote Sens. 2012, 70, 99–106. [Google Scholar] [CrossRef]
- Zhang, Q.J.; Wang, G.Y.; Zheng, G.T. Micro-vibration attenuation methods and key techniques for optical remote sensing satellite. J. Astronaut. 2015, 36, 125–132. [Google Scholar]
- Goodfellow, I.J.; Pouget-Abadie, J.; Mirza, M.; Xu, B.; Warde-Farley, D.; Ozair, S.; Courville, A.; Bengio, Y. Generative adversarial networks. arXiv 2014, arXiv:1406.2661. [Google Scholar] [CrossRef]
- Salimans, T.; Goodfellow, I.; Zaremba, W.; Cheung, V.; Radford, A.; Chen, X. Improved techniques for training gans. arXiv 2016, arXiv:1606.03498. [Google Scholar]
- Arjovsky, M.; Chintala, S.; Bottou, L. Wasserstein generative adversarial networks. In Proceedings of the International Conference on Machine Learning (PMLR 2017), Sydney, Australia, 6–11 August 2017; pp. 214–223. [Google Scholar]
- Isola, P.; Zhu, J.Y.; Zhou, T.; Efros, A.A. Image-to-image translation with conditional adversarial networks. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 1125–1134. [Google Scholar]
- Radford, A.; Metz, L.; Chintala, S. Unsupervised representation learning with deep convolutional generative adversarial networks. arXiv 2015, arXiv:1511.06434. [Google Scholar]
- Wang, M.; Zhu, Y.; Pan, J.; Yang, B.; Zhu, Q. Satellite jitter detection and compensation using multispectral imagery. Remote Sens. Lett. 2016, 7, 513–522. [Google Scholar] [CrossRef]
- Rengarajan, V.; Balaji, Y.; Rajagopalan, A. Unrolling the shutter: Cnn to correct motion distortions. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 2291–2299. [Google Scholar]
- Yang, Y.; Newsam, S. Bag-of-visual-words and spatial extensions for land-use classification. In Proceedings of the 18th SIGSPATIAL International Conference on Advances in Geographic Information Systems, San Jose, CA, USA, 2–5 November 2010; pp. 270–279. [Google Scholar]
- Dai, D.; Yang, W. Satellite image classification via two-layer sparse coding with biased image representation. IEEE Geosci. Remote Sens. Lett. 2010, 8, 173–176. [Google Scholar] [CrossRef] [Green Version]
- Tong, X.; Li, L.; Liu, S.; Xu, Y.; Ye, Z.; Jin, Y.; Wang, F.; Xie, H. Detection and estimation of ZY-3 three-line array image distortions caused by attitude oscillation. ISPRS J. Photogramm. Remote Sens. 2015, 101, 291–309. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Image Type | P @ 5 | P @ 10 | P @ 50 | P @ 100 | mAP |
|---|---|---|---|---|---|
| Deformed | 0.4263 | 0.41736 | 0.3947 | 0.381 | 0.2495 |
| UnrollingCNN | 0.6231 | 0.6089 | 0.5925 | 0.5726 | 0.3901 |
| GenCNN | 0.6157 | 0.6042 | 0.5691 | 0.5438 | 0.3622 |
| ContGAN | 0.6105 | 0.6079 | 0.5685 | 0.5448 | 0.3580 |
| RestoreGAN | 0.6979 | 0.6926 | 0.6575 | 0.6359 | 0.4180 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Z.; Zhang, Z.; Dong, L.; Xu, G. Jitter Detection and Image Restoration Based on Generative Adversarial Networks in Satellite Images. Sensors 2021, 21, 4693. https://doi.org/10.3390/s21144693
Wang Z, Zhang Z, Dong L, Xu G. Jitter Detection and Image Restoration Based on Generative Adversarial Networks in Satellite Images. Sensors. 2021; 21(14):4693. https://doi.org/10.3390/s21144693
Chicago/Turabian StyleWang, Zilin, Zhaoxiang Zhang, Limin Dong, and Guodong Xu. 2021. "Jitter Detection and Image Restoration Based on Generative Adversarial Networks in Satellite Images" Sensors 21, no. 14: 4693. https://doi.org/10.3390/s21144693
APA StyleWang, Z., Zhang, Z., Dong, L., & Xu, G. (2021). Jitter Detection and Image Restoration Based on Generative Adversarial Networks in Satellite Images. Sensors, 21(14), 4693. https://doi.org/10.3390/s21144693