
Forecasting of Typhoon-Induced Wind-Wave by Using Convolutional Deep Learning on Fused Data of Remote Sensing and Ground Measurements



Abstract
:1. Introduction
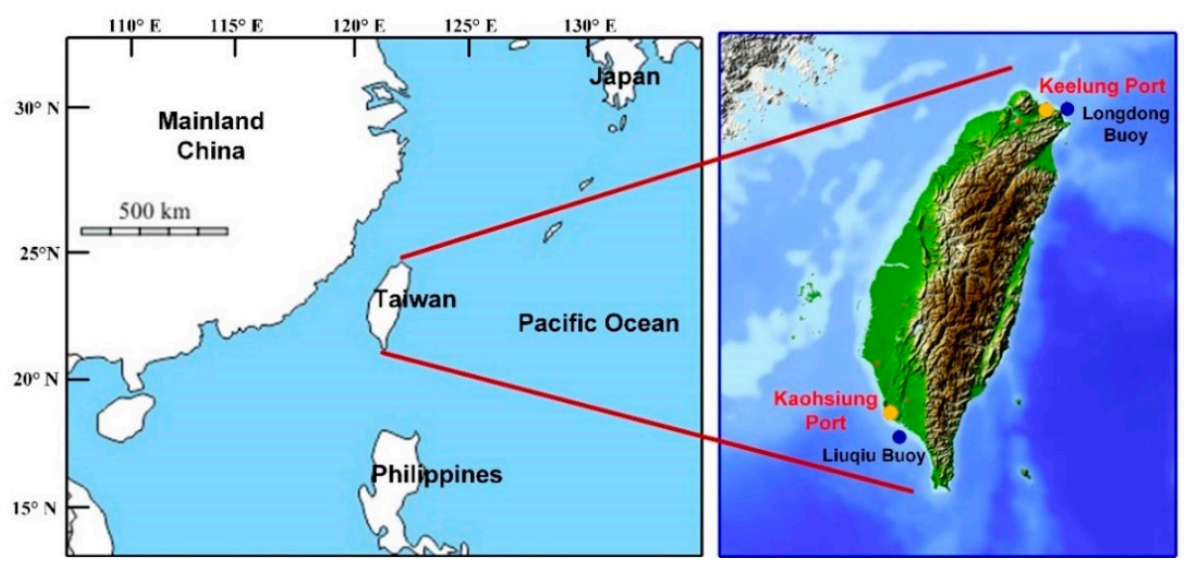
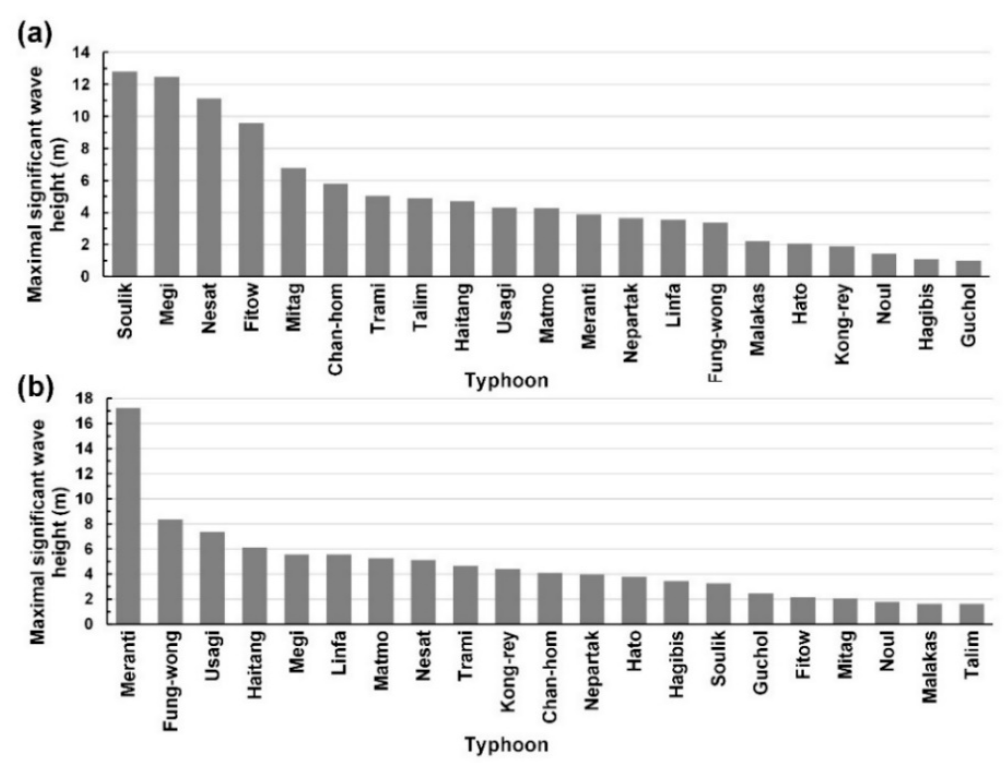
2. Data Sources
3. Model Development
3.1. Model Cases
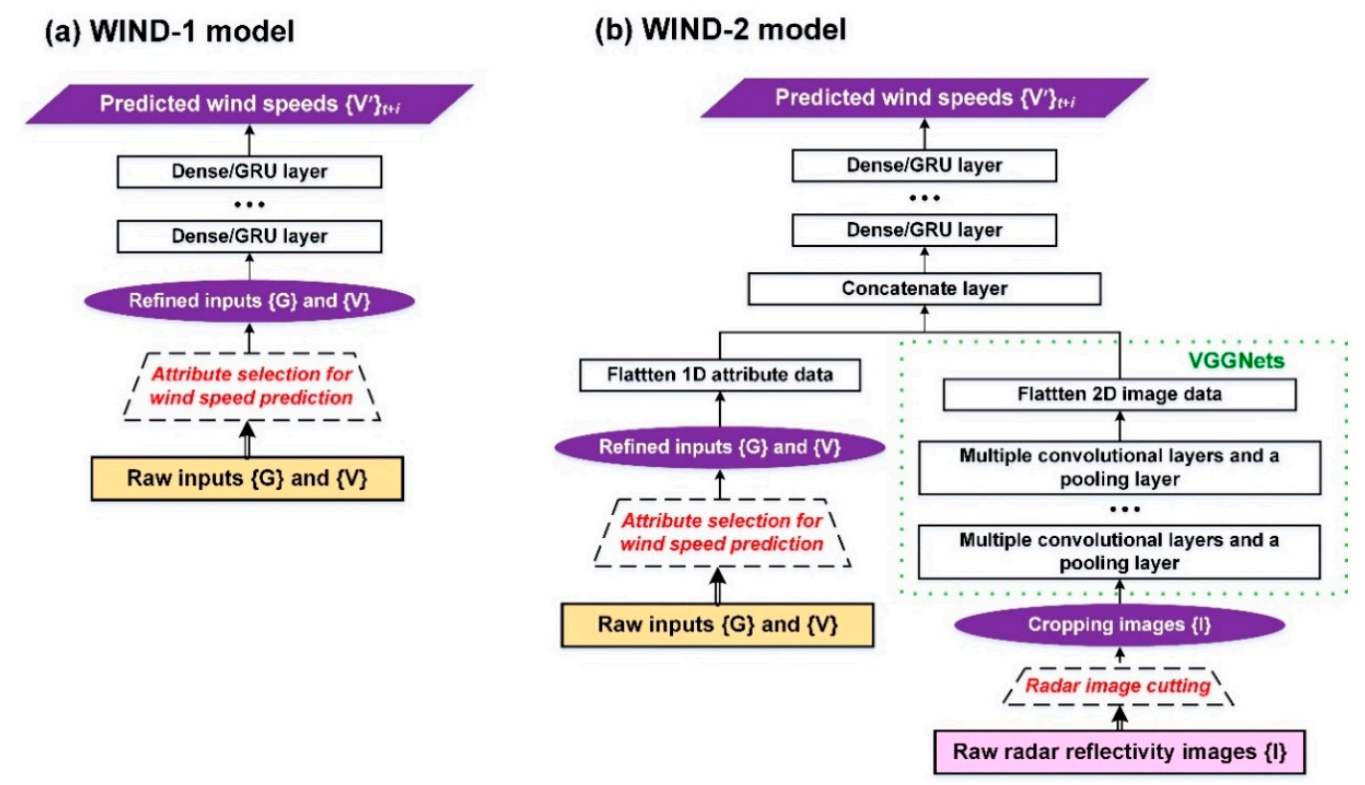
3.1.1. WIND-1 and WIND-2 Models
- WIND-1 model
- WIND-2 model
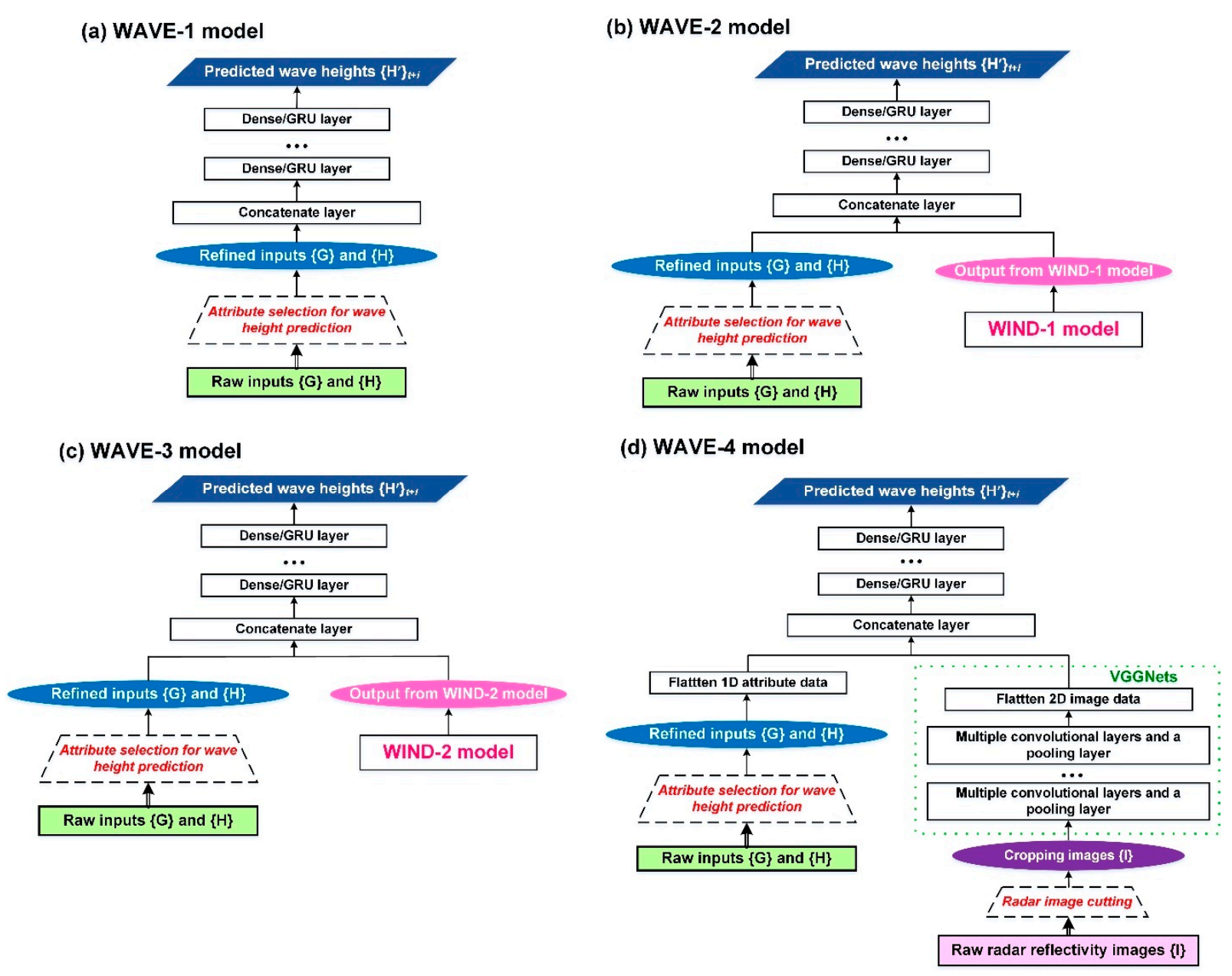
3.1.2. WAVE-1 to WAVE-4 Models
- WAVE-1 model
- WAVE-2 model using WIND-1 model outcomes
- WAVE-3 model using WIND-2 model outcomes
- WAVE-4 model
3.2. Typhoon Data Division
3.3. Modeling for Wind Predictions
3.3.1. Construction of WIND-1 Model
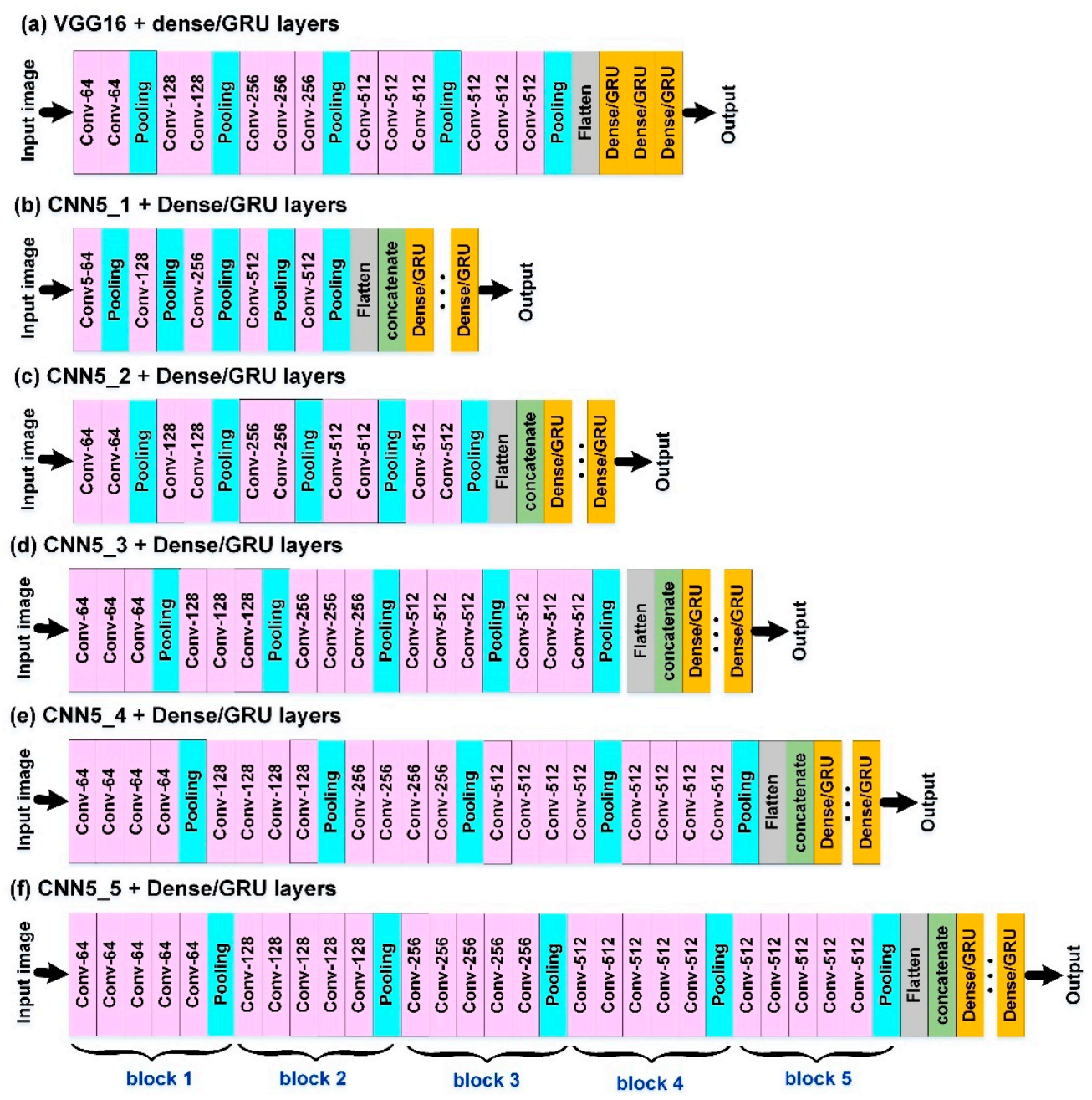
3.3.2. Construction of WIND-2 Model
3.4. Modeling for Wave Predictions
4. Simulations
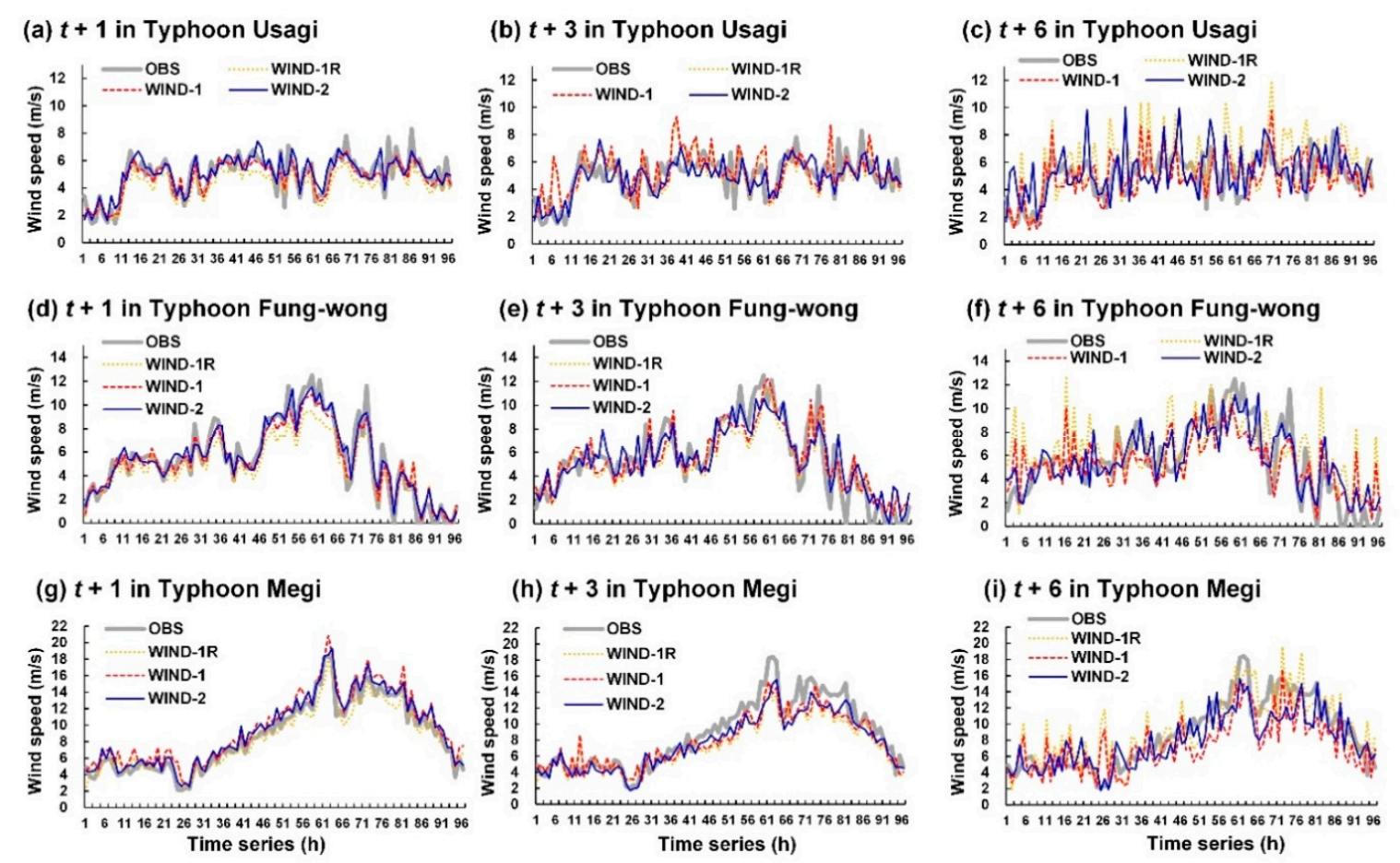
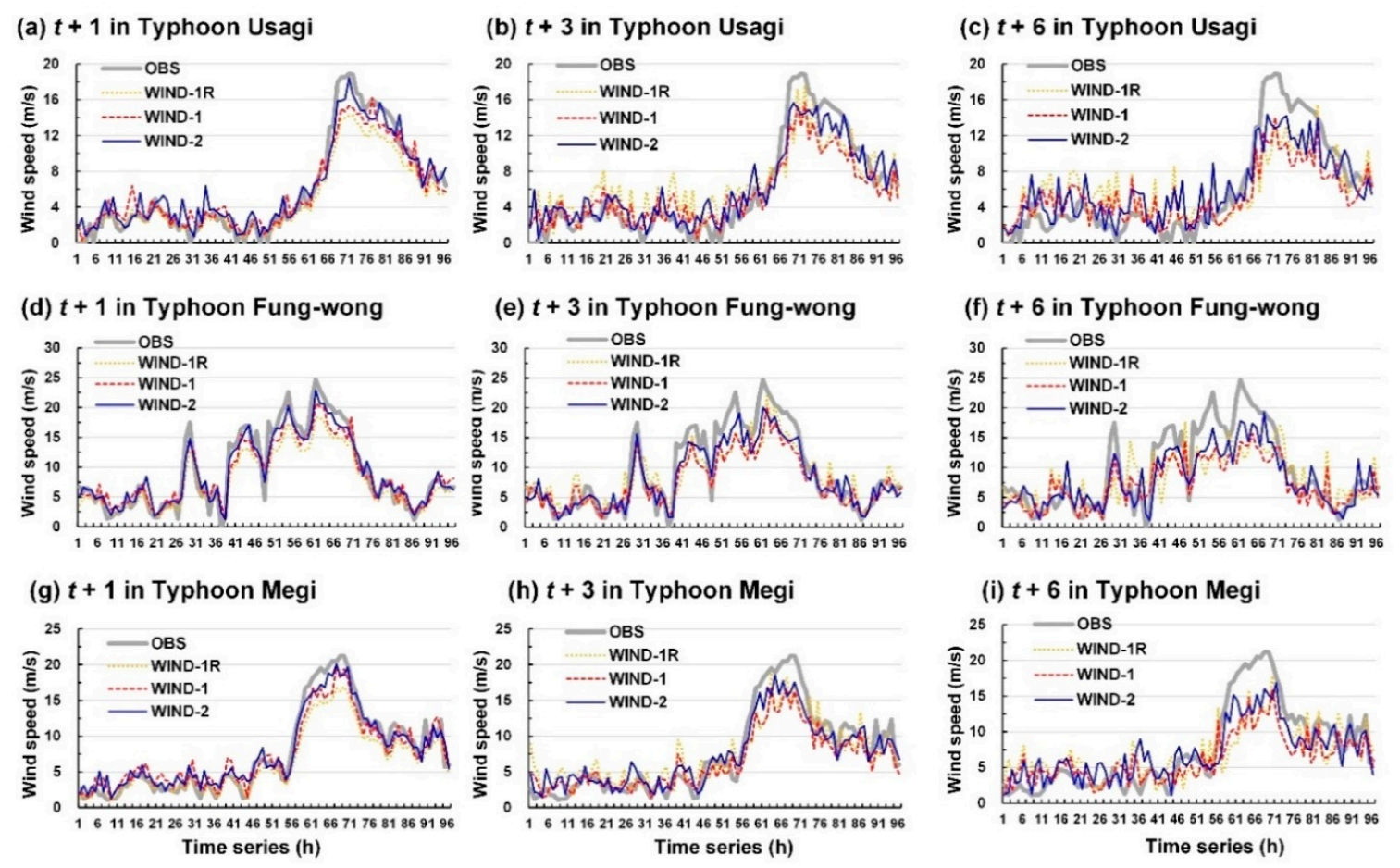
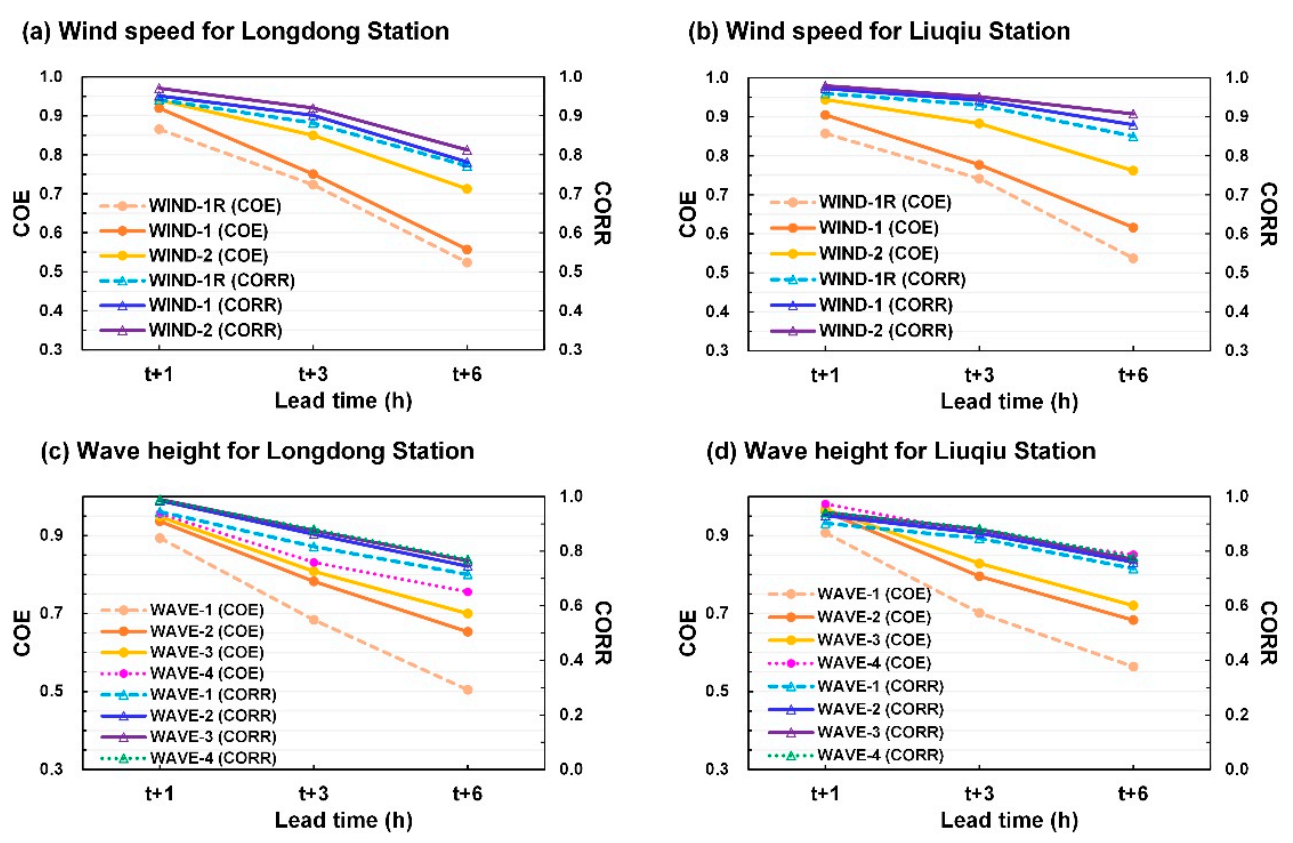
4.1. Wind Prediction Outcomes
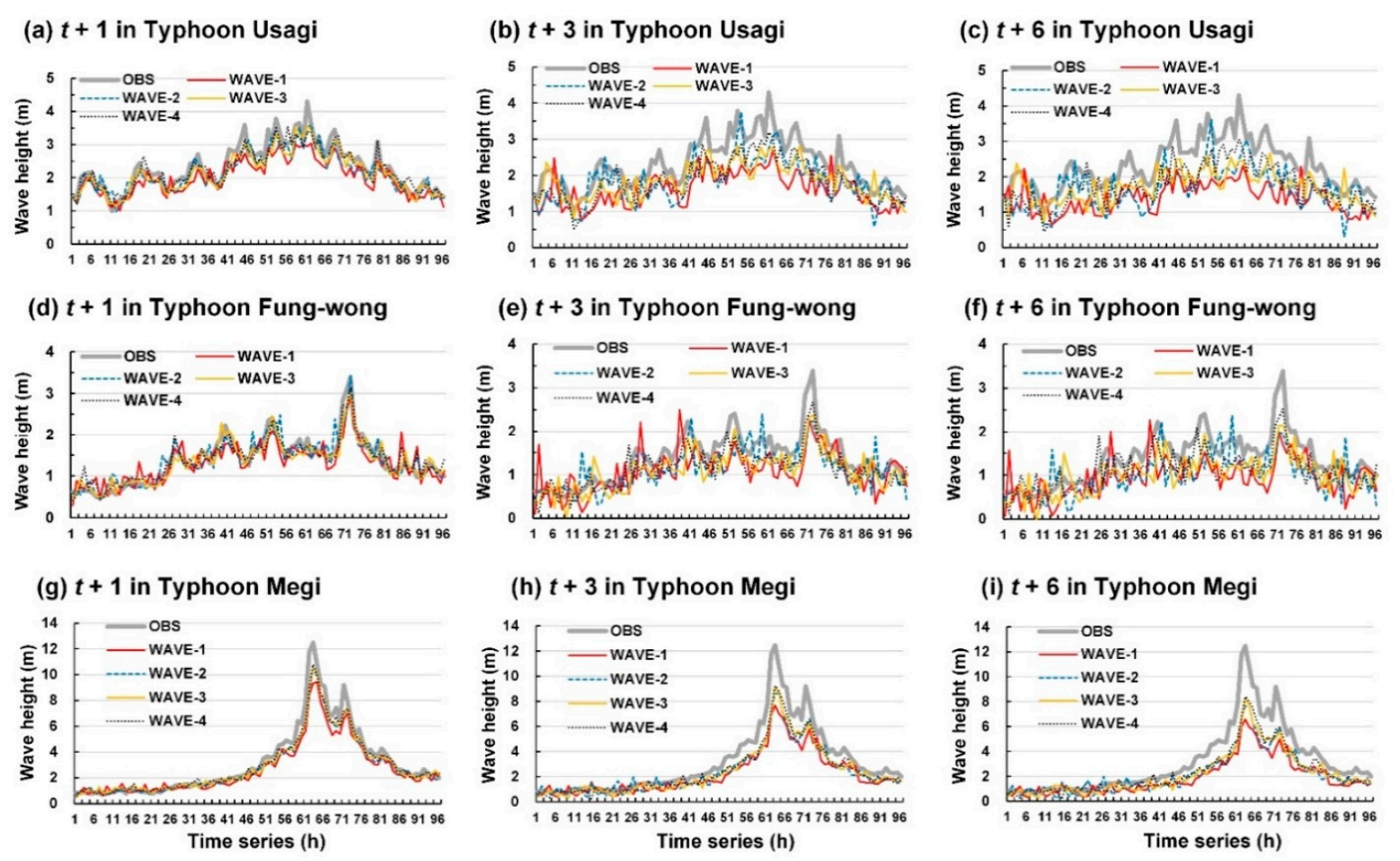
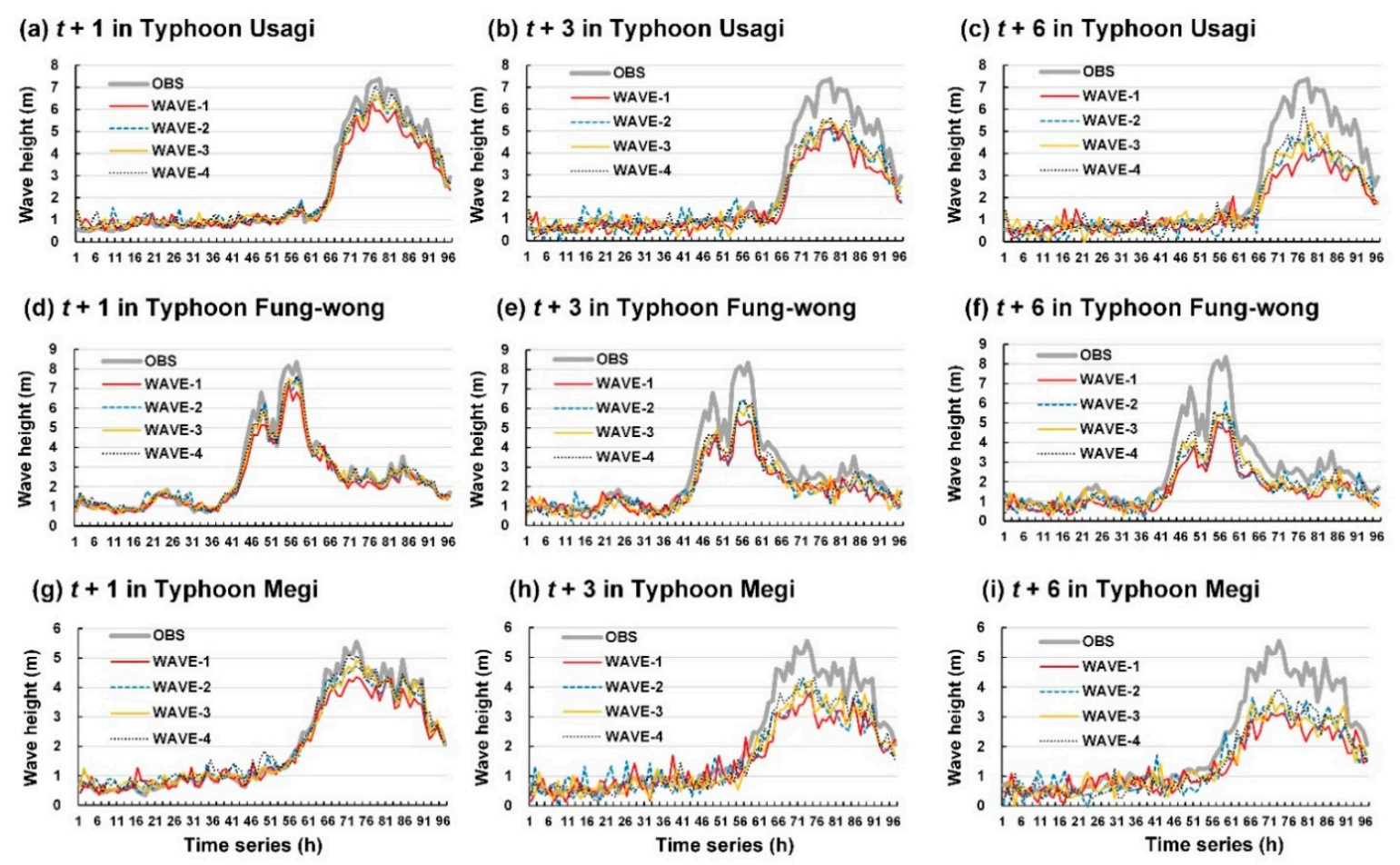
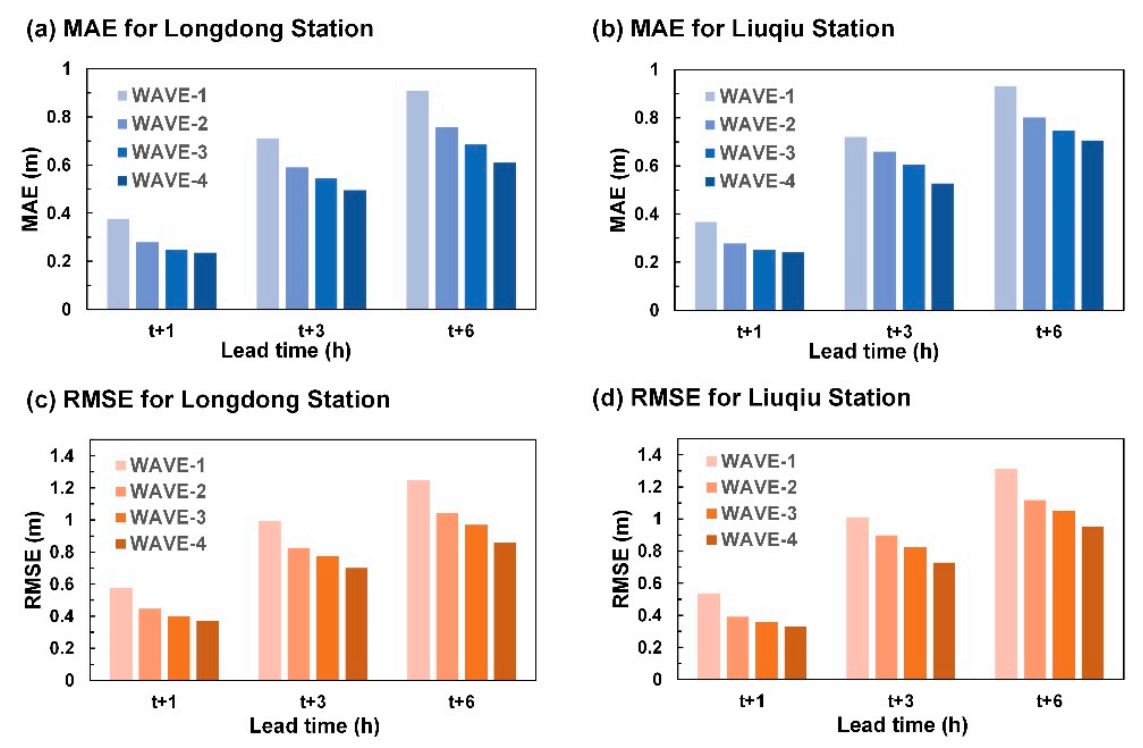
4.2. Wave Prediction Outcomes
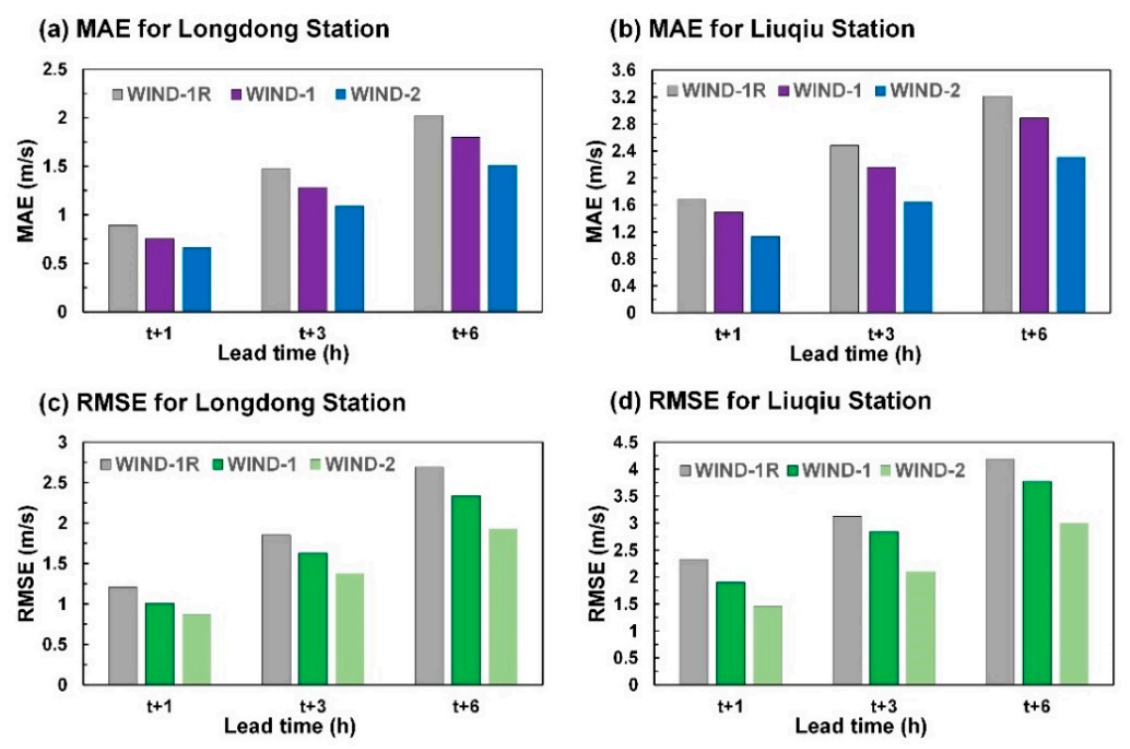
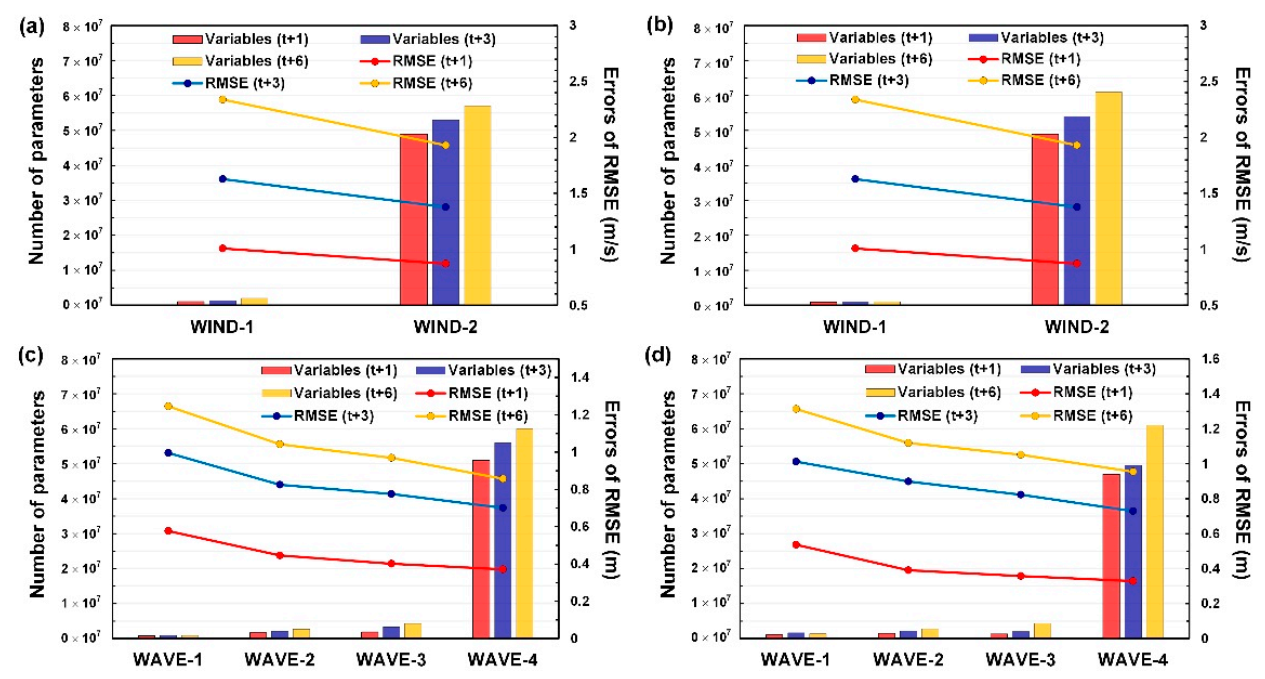
4.3. Overall Performance for Predicting the Wind Velocity and Wave Height
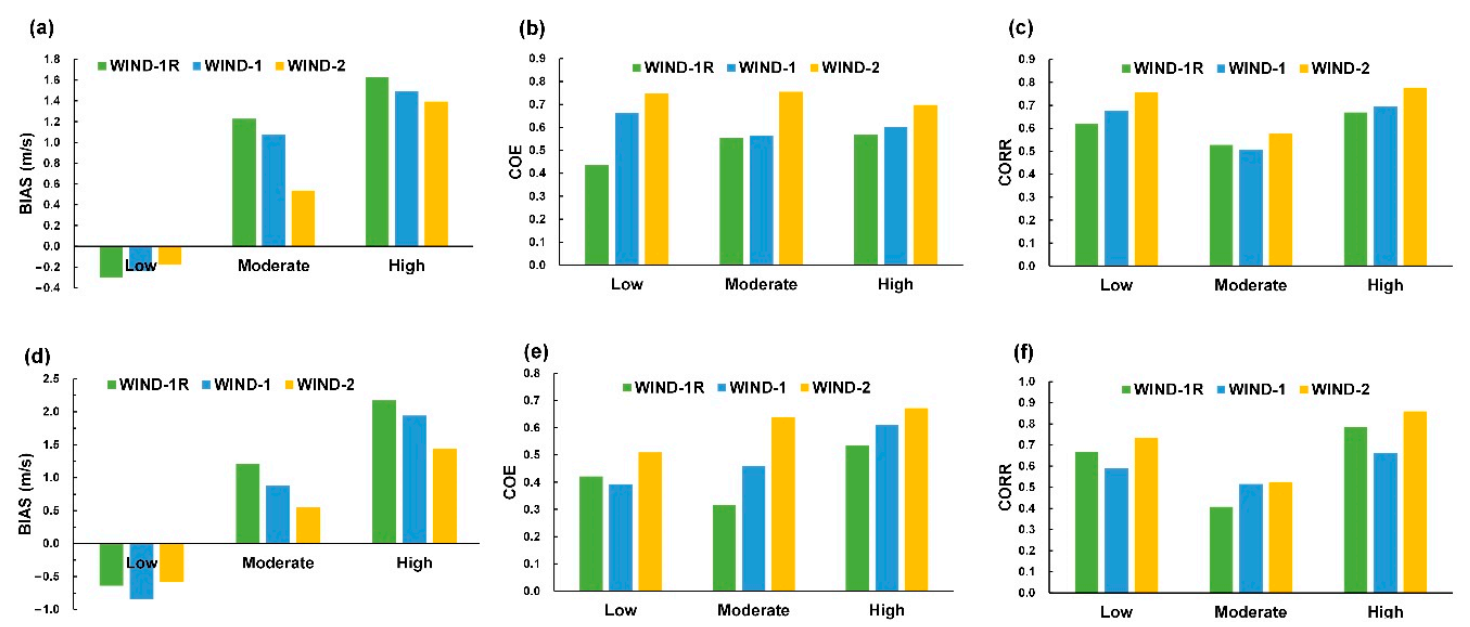
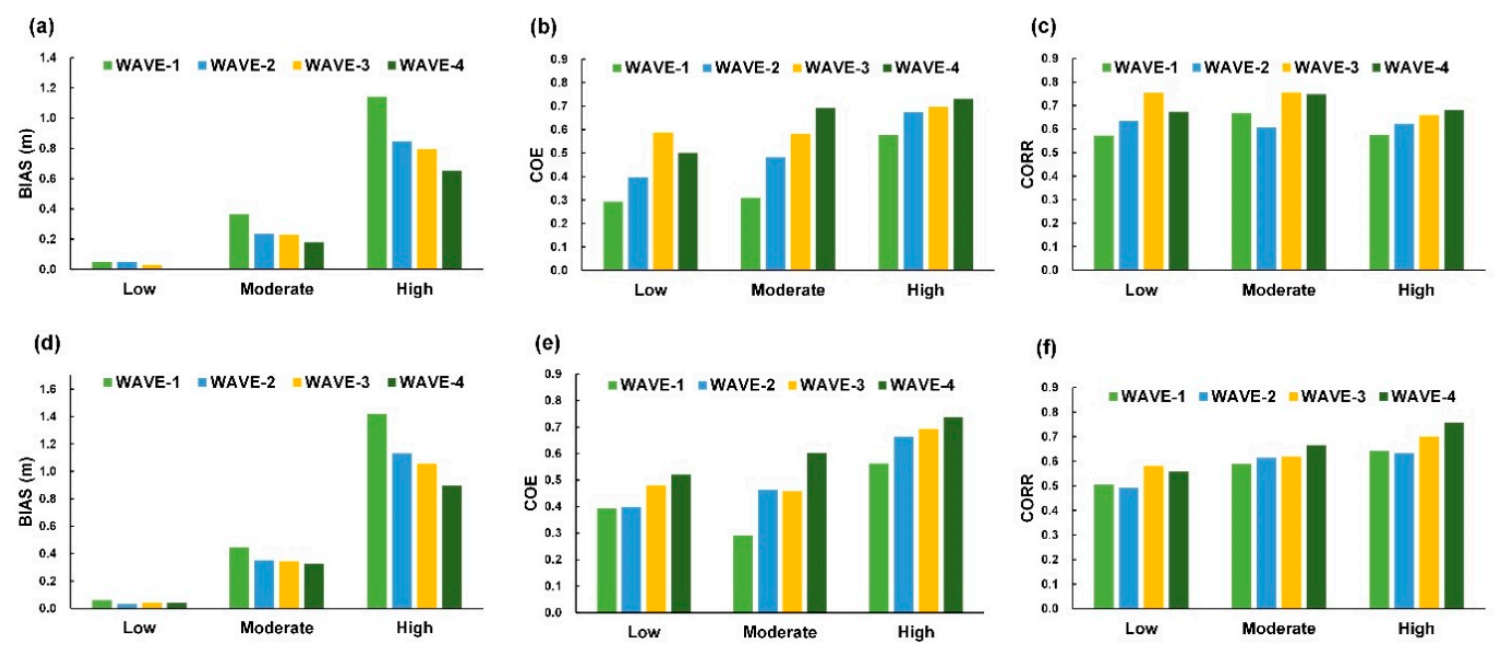
4.4. Evaluation of the Classification for Wind Velocity and Wave Height
4.5. Discussion
5. Conclusions and Suggestion
Author Contributions
Funding
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
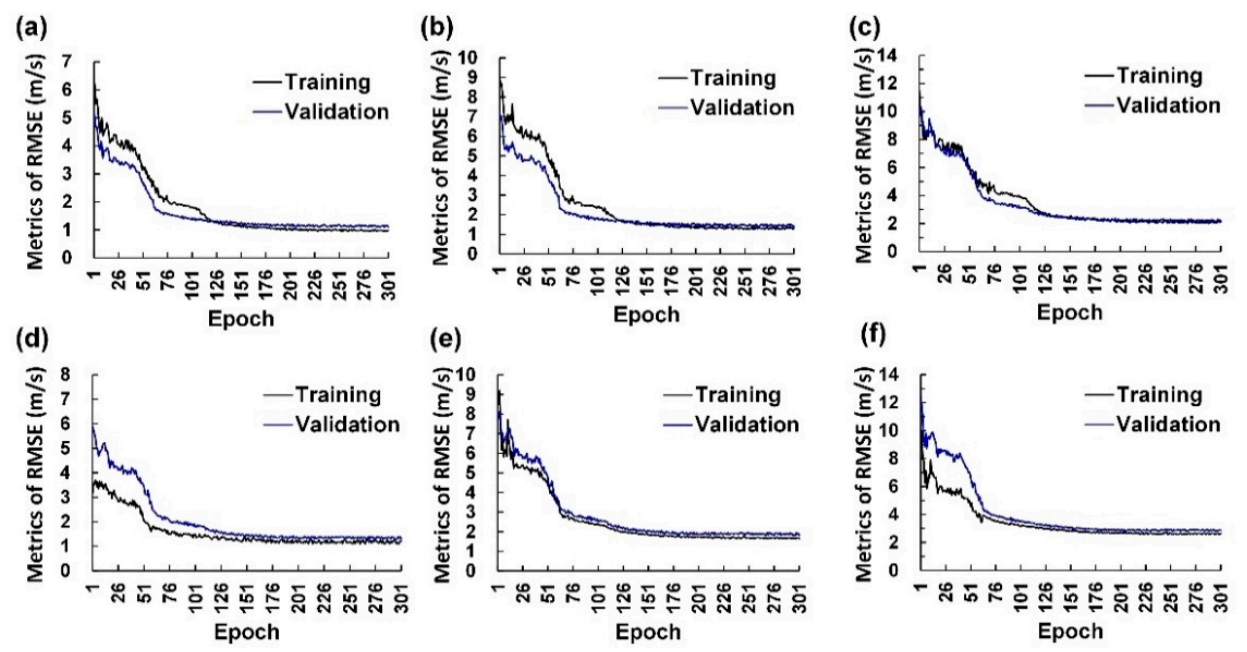
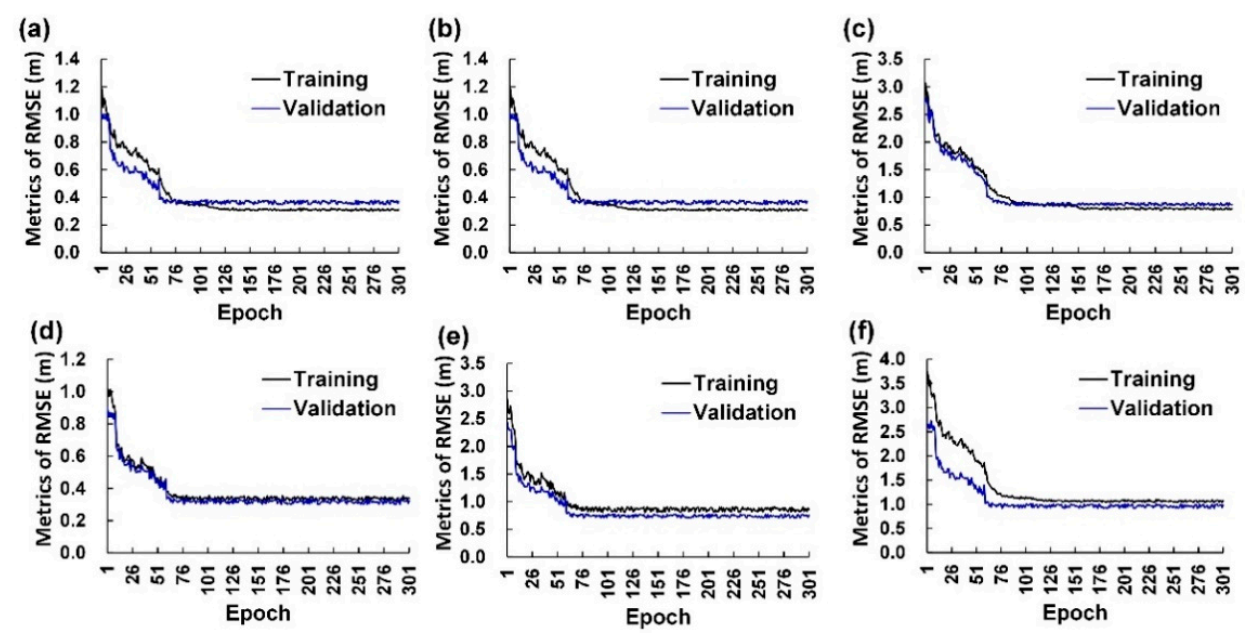
Appendix A. Learning Curves of Training Stage and Validation Stage in the Final Optimal Models


References
- TIPC (Taiwan International Ports Corporation, Ltd.). 2020. Available online: https://www.twport.com.tw/en/ (accessed on 1 October 2020).
- Wei, C.C.; Huang, T.H. Modular neural networks with fully convolutional networks for typhoon-induced short-term rainfall predictions. Sensors 2021, 21, 4200. [Google Scholar] [CrossRef]
- Probert-Jones, J.R. Meteorological use of pulsed Doppler radar. Nature 1960, 186, 271–273. [Google Scholar] [CrossRef]
- Lhermitte, R.H.; Atlas, D. Precipitation Motion by Pulse Doppler Radar. In Proceedings of the 9th Weather Radar Conference, Kansas City, MI, USA, 23–26 October 1961; pp. 218–223. [Google Scholar]
- Browning, K.A.; Wexler, R. The determination of kinematic properties of a wind field using Doppler radar. J. Appl. Meteorol. 1968, 7, 105–113. [Google Scholar] [CrossRef]
- Marks, F.D.; Houze, R.A. Airborne Doppler radar observations in hurricane Debby. Bull. Am. Meteorol. Soc. 1984, 65, 569–582. [Google Scholar] [CrossRef]
- Marks, F.D.; Houze, R.A. Inner core structure of hurricane Alicia from airborne Doppler radar observations. J. Atmos. Sci. 1987, 44, 1296–1317. [Google Scholar] [CrossRef] [Green Version]
- Lee, W.C.; Jou, B.J.D.; Chang, B.L. Nowcasting Typhoon Circulation using Doppler Radar: The Ground-based VTD (GBVTD) Technique. In Proceedings of the 26th International Conference on Radar Meteorology, Norman, OK, USA, 24–28 May 1993; pp. 83–87. [Google Scholar]
- Lee, W.C.; Jou, B.J.D.; Chang, P.L.; Deng, S.M. Tropical cyclone kinematic structure retrieved from single-Doppler radar observations. Part I: Interpretation of Doppler velocity patterns and the GBVTD technique. Mon. Weather Rev. 1999, 127, 2419–2439. [Google Scholar] [CrossRef]
- Gao, J.; Xue, M.; Shapiro, A.; Droegemeier, K.K. A variational method for the analysis of three-dimensional wind fields from two Doppler radars. Mon. Weather Rev. 1999, 127, 2128–2142. [Google Scholar] [CrossRef]
- Gao, J.; Xue, M.; Brewster, K.; Droegemeier, K.K. A three-dimensional variational data analysis method with recursive filter for Doppler radars. J. Atmos. Ocean. Technol. 2004, 21, 457–469. [Google Scholar] [CrossRef]
- Liou, Y.C.; Wang, T.C.C.; Lee, W.C.; Chang, Y.J. The retrieval of asymmetric tropical cyclone structures using Doppler radar simulations and observations with the extended GBVTD technique. Mon. Weather Rev. 2006, 134, 1140–1160. [Google Scholar] [CrossRef]
- Park, S.G.; Lee, D.K. Retrieval of high-resolution wind fields over the Southern Korean Peninsula using the Doppler weather radar network. Weather Forecast. 2009, 24, 87–103. [Google Scholar] [CrossRef]
- Grell, G.A.; Dudhia, J.; Stauffer, D.R. A Description of the Fifth-Generation Penn State/NCAR Mesoscale Model (MM5); NCAR Technical Note NCAR/TN-398+STR; University Corporation for Atmospheric Research: Boulder, CO, USA, 1994. [Google Scholar]
- Skamarock, W.C.; Klemp, J.B. A time-split nonhydrostatic atmospheric model for weather research and forecasting applications. J. Comput. Phys. 2008, 227, 3465–3485. [Google Scholar] [CrossRef]
- Carvalho, D.; Rocha, A.; Gómez-Gesteira, M.; Santos, C. A sensitivity study of the WRF model in wind simulation for an area of high wind energy. Environ. Model. Softw. 2012, 33, 23–34. [Google Scholar] [CrossRef] [Green Version]
- Skamarock, W.C.; Klemp, J.B.; Dudhia, J.; Gill, D.; Barker, D.; Duda, M.; Huang, X.Y.; Wang, W.; Powers, J.G. A Description of the Advanced Research WRF Version 3; NCAR Technical Note NCAR/TN-475+STR; University Corporation for Atmospheric Research: Boulder, CO, USA, 2008. [Google Scholar]
- Tolman, H.L. User Manual and System Documentation of WAVE-WATCH III, Version 1.18; NOAA/NWS/NCEP/OMB Technical Note 166; National Oceanic and Atmospheric Administration: Washington, DC, USA, 1999.
- Booij, N.; Ris, R.C.; Holthuijsen, L.H. A third generation wave model for coastal regions, Part I, model description and validation. J. Geophys. Res. 1999, 104, 7649–7666. [Google Scholar] [CrossRef] [Green Version]
- Tsai, C.C.; Wei, C.C.; Hou, T.H.; Hsu, T.W. Artificial neural network for forecasting wave heights along a ship’s route during hurricanes. J. Waterw. Port Coast. Ocean Eng. 2018, 144, 04017042. [Google Scholar] [CrossRef]
- Wei, C.C. Study on wind simulations using deep learning techniques during typhoons: A case study of Northern Taiwan. Atmosphere 2019, 10, 684. [Google Scholar] [CrossRef] [Green Version]
- Chang, H.K.; Liou, J.C.; Liu, S.J.; Liaw, S.R. Simulated wave-driven ANN model for typhoon waves. Adv. Eng. Softw. 2011, 42, 25–34. [Google Scholar] [CrossRef]
- Wei, C.C. Development of stacked long short-term memory neural networks with numerical solutions for wind velocity predictions. Adv. Meteorol. 2020, 2020, 5462040. [Google Scholar] [CrossRef]
- More, A.; Deo, M.C. Forecasting wind with neural networks. Mar. Struct. 2003, 16, 35–49. [Google Scholar] [CrossRef]
- Dongmei, H.; Shiqing, H.; Xuhui, H.; Xue, Z. Prediction of wind loads on high-rise building using a BP neural network combined with POD. J. Wind Eng. Ind. Aerodyn. 2017, 170, 1–17. [Google Scholar] [CrossRef]
- Huang, Y.; Liu, S.; Yang, L. Wind speed forecasting method using EEMD and the combination forecasting method based on GPR and LSTM. Sustainability 2018, 10, 3693. [Google Scholar] [CrossRef] [Green Version]
- Wei, C.C. Surface wind nowcasting in the Penghu islands based on classified typhoon tracks and the effects of the Central Mountain Range of Taiwan. Weather Forecast. 2014, 29, 1425–1450. [Google Scholar] [CrossRef]
- Wang, H.Z.; Wang, G.B.; Li, G.Q.; Peng, J.C.; Liu, Y.T. Deep belief network based deterministic and probabilistic wind speed forecasting approach. Appl. Energy 2016, 182, 80–93. [Google Scholar] [CrossRef]
- Wei, C.C.; Peng, P.C.; Tsai, C.H.; Huang, C.L. Regional forecasting of wind speeds during typhoon landfall in Taiwan: A case study of westward-moving typhoons. Atmosphere 2018, 9, 141. [Google Scholar] [CrossRef] [Green Version]
- Mandal, S.; Prabaharan, N. Ocean wave forecasting using recurrent neural networks. Ocean. Eng. 2006, 33, 1401–1410. [Google Scholar] [CrossRef]
- Zhang, X.; Dai, H. Significant wave height prediction with the CRBM-DBN model. J. Atmos. Ocean. Technol. 2019, 36, 333–351. [Google Scholar] [CrossRef]
- Wei, C.C.; Cheng, J.Y. Nearshore two-step typhoon wind-wave prediction using deep recurrent neural networks. J. Hydroinform. 2020, 22, 346–367. [Google Scholar] [CrossRef]
- LeCun, Y. Generalization and Network Design Strategies; Technical Report CRG-TR-89-4; Elsevier: Amsterdam, The Netherlands, 1989; Volume 19, pp. 143–155. [Google Scholar]
- LeCun, Y.; Bottou, L.E.; Bengio, Y.; Haffner, P. Gradient-based learning applied to document recognition. Proc. IEEE 1998, 86, 2278–2324. [Google Scholar] [CrossRef] [Green Version]
- Krizhevsky, A.; Sutskever, I.; Hinton, G.E. ImageNet classification with deep convolutional neural networks. Adv. Neural Inf. Process. Syst. 2012, 25, 1097–1105. [Google Scholar] [CrossRef]
- Simonyan, K.; Zisserman, A. Very deep convolutional networks for large-scale image recognition. arXiv 2014, arXiv:1409.1556. [Google Scholar]
- Szegedy, C.; Liu, W.; Jia, Y.; Sermanet, P.; Reed, S.; Anguelov, D.; Erhan, D.; Vanhoucke, V.; Rabinovich, A. Going Deeper with Convolutions. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Boston, MA, USA, 7–12 June 2015; pp. 1–9. [Google Scholar]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep Residual Learning for Image Recognition. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 26 June–1 July 2016; pp. 770–778. [Google Scholar]
- Ordóñez, F.J.; Roggen, D. Deep convolutional and LSTM recurrent neural networks for multimodal wearable activity recognition. Sensors 2016, 16, 115. [Google Scholar] [CrossRef] [Green Version]
- Hochreiter, S.; Schmidhuber, J. Long short-term memory. Neural Comput. 1997, 9, 1735–1780. [Google Scholar] [CrossRef]
- Graves, A. Long Short-term Memory. In Supervised Sequence Labelling with Recurrent Neural Networks; Springer: Berlin/Heidelberg, Germany, 2012; pp. 37–45. [Google Scholar]
- Chung, J.; Gulcehre, C.; Cho, K.; Bengio, Y. Empirical evaluation of gated recurrent neural networks on sequence modeling. arXiv 2014, arXiv:1412.3555. [Google Scholar]
- Cho, K.; van Merrienboer, B.; Gulcehre, C.; Bahdanau, D.; Bougares, F.; Schwenk, H.; Bengio, Y. Learning phrase representations using RNN encoder-decoder for statistical machine translation. arXiv 2014, arXiv:1406.1078. [Google Scholar]
- Wang, X.; Xu, J.; Shi, W.; Liu, J. OGRU: An optimized gated recurrent unit neural network. J. Phys. Conf. Ser. 2019, 1325, 012089. [Google Scholar] [CrossRef]
- Zhang, D.; Kabuka, M. Combining weather condition data to predict traffic flow: A GRU based deep learning approach. IET Intell. Transp. Syst. 2018, 12, 578–585. [Google Scholar] [CrossRef]
- Wu, W.; Liao, W.; Miao, J.; Du, G. Using gated recurrent unit network to forecast short-term load considering impact of electricity price. Energy Procedia 2019, 158, 3369–3374. [Google Scholar] [CrossRef]
- Gao, B.; Huang, X.; Shi, J.; Tai, Y.; Xiao, R. Predicting day-ahead solar irradiance through gated recurrent unit using weather forecasting data. J. Renew. Sustain. Energy 2019, 11, 043705. [Google Scholar] [CrossRef]
- Shi, X.; Chen, Z.; Wang, H.; Yeung, D.Y.; Wong, W.K.; Woo, W.C. Convolutional LSTM network: A machine learning approach for precipitation nowcasting. In Proceedings of the Advances in Neural Information Processing Systems 28 (NIPS 2015), Montreal, QC, Canada, 7–12 December 2015; pp. 802–810. [Google Scholar]
- Wang, Y.; Long, M.; Wang, J.; Gao, Z.; Yu, P.S. PredRNN: Recurrent Neural Networks for Predictive Learning using Spatiotemporal LSTMs. In Proceedings of the Neural Information Processing Systems 30 (NIPS 2017), Long Beach, CA, USA, 4–9 December 2017; pp. 879–888. [Google Scholar]
- Wang, Y.; Long, M.; Wang, J.; Gao, Z.; Yu, P.S. PredRNN++: Towards a resolution of the deep-in-time dilemma in spatiotemporal predictive learning. PLMR 2018, 80, 5123–5132. [Google Scholar]
- Lu, Y.; Li, H. Automatic lip-reading system based on deep convolutional neural network and attention-based long short-term memory. Appl. Sci. 2019, 9, 1599. [Google Scholar] [CrossRef] [Green Version]
- Zhu, Q.; Chen, J.; Zhu, L.; Duan, X.; Liu, Y. Wind speed prediction with spatio-temporal correlation: A deep learning approach. Energies 2018, 11, 705. [Google Scholar] [CrossRef] [Green Version]
- Shivam, K.; Tzou, J.C.; Wu, S.C. Multi-step short-term wind speed prediction using a residual dilated causal convolutional network with nonlinear attention. Energies 2020, 13, 1772. [Google Scholar] [CrossRef] [Green Version]
- Moishin, M.; Deo, R.C.; Prasad, R.; Raj, N.; Abdulla, S. Designing deep-based learning flood forecast model with ConvLSTM hybrid algorithm. IEEE Access 2021, 9, 50982–50993. [Google Scholar] [CrossRef]
- Central Weather Bureau (CWB). Typhoon Database. 2020. Available online: https://rdc28.cwb.gov.tw/ (accessed on 1 July 2020).
- Wei, C.C.; Hsieh, P.Y. Estimation of hourly rainfall during typhoons using radar mosaic-based convolutional neural networks. Remote Sens. 2020, 12, 896. [Google Scholar] [CrossRef] [Green Version]
- Jou, J.D.B. Application of Doppler Radar Data on Quantitative Precipitation Forecasting; Project Report to Central Weather Bureau: Taipei, Taiwan. (In Chinese)
- LeCun, Y.; Bengio, Y. Convolutional Networks for Images, Speech, and Time-series. In The Handbook of Brain Theory and Neural Networks; MIT Press: Cambridge, MA, USA, 1995. [Google Scholar]
- Chollet, F. Keras: Deep Learning Library for Theano and Tensorflow. 2015. Available online: https://keras.io/ (accessed on 6 February 2020).
- Kingma, D.P.; Ba, J. Adam: A Method for Stochastic Optimization. In Proceedings of the Third International Conference on Learning Representations, San Diego, CA, USA, 7–9 May 2015; p. 11. [Google Scholar]
- Kumar, A.; Islam, T.; Sekimoto, Y.; Mattmann, C.; Wilson, B. Convcast: An embedded convolutional LSTM based architecture for precipitation nowcasting using satellite data. PLoS ONE 2020, 15, e0230114. [Google Scholar] [CrossRef] [PubMed]
- Taiwan Typhoon Information Center. Typhoon Database. 2021. Available online: https://typhoon.ws/learn/reference/typhoon_scale (accessed on 18 July 2021).
- McKee, J.L.; Binns, A.D. A review of gauge–radar merging methods for quantitative precipitation estimation in hydrology. Can. Water Resour. J. 2016, 41, 186–203. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Typhoon | Periods | Intensity | Typhoon | Periods | Intensity |
|---|---|---|---|---|---|
| Soulik | 11–13 July 2013 | Severe | Nepartak | 6–9 July 2016 | Severe |
| Trami | 20–22 August 2013 | Mild | Meranti | 12–15 September 2016 | Severe |
| Kong-rey | 27–29 August 2013 | Mild | Malakas | 15–18 September 2016 | Moderate |
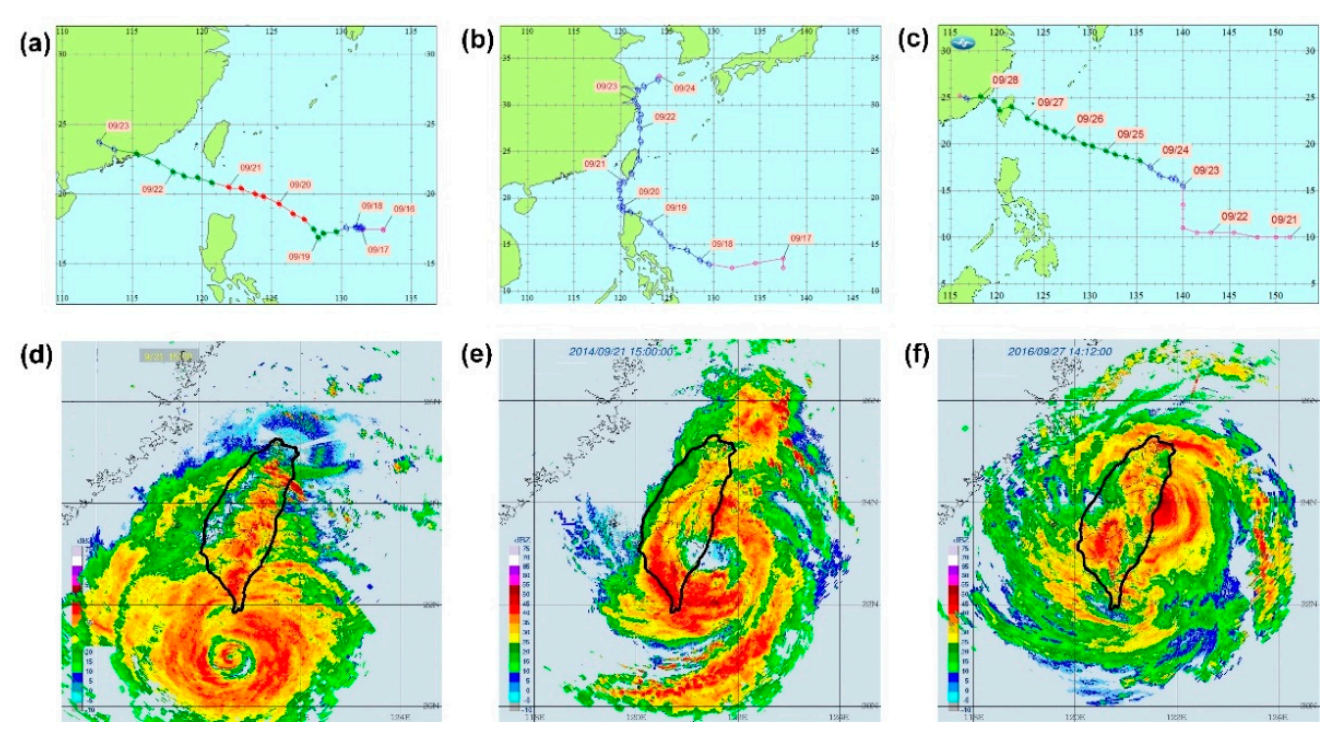
| Usagi | 19–22 September 2013 | Severe | Megi | 25–28 September 2016 | Moderate |
| Fitow | 4–7 October 2013 | Moderate | Nesat | 28–30 July 2017 | Moderate |
| Hagibis | 14–15 June 2014 | Mild | Haitang | 30–31 July 2017 | Mild |
| Matmo | 21–23 July 2014 | Moderate | Hato | 20–22 August 2017 | Moderate |
| Fung-wong | 19–22 September 2014 | Mild | Guchol | 6–7 September 2017 | Mild |
| Noul | 10–11 May 2015 | Severe | Talim | 12–14 September 2017 | Moderate |
| Chan-hom | 9–11 July 2015 | Moderate | Mitag | 29 September–1 October 2019 | Moderate |
| Linfa | 6–9 July 2015 | Mild |
| Model Case | Algorithm | Input Data | Referred Paper |
|---|---|---|---|
| WIND-1 | MLP/GRU | 1D in-situ {G,V} | [21,23,29] |
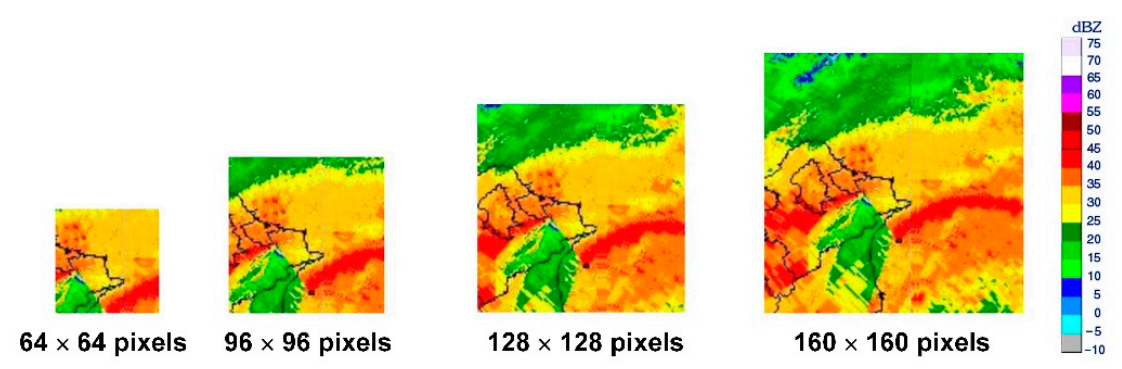
| WIND-2 | CNN + MLP/GRU | 1D in-situ {G,V} and 2D image {I} | Present |
| WAVE-1 | MLP/GRU | 1D in-situ {G,H} | [32] |
| WAVE-2 | MLP/GRU | 1D in-situ {G,H} and predicted {V’} from WIND-1 | [32] |
| WAVE-3 | MLP/GRU | 1D in-situ {G,H} and predicted {V’} from WIND-2 | Present |
| WAVE-4 | CNN + MLP/GRU | 1D in-situ {G,H} and 2D image {I} | Present |
| Model | Buoy | Lead Time (h) | |||||
|---|---|---|---|---|---|---|---|
| t + 1 | t + 3 | t + 6 | |||||
| Parameters with Metrics | Layers, Neurons | RMSE (m/s) | Layers, Neurons | RMSE (m/s) | Layers, Neurons | RMSE (m/s) | |
| WIND-1_dense | Longdong | 1, 100 | 1.417 | 2, 130 | 2.018 | 2, 140 | 2.812 |
| Liuqiu | 1, 70 | 1.763 | 2, 80 | 2.735 | 2, 100 | 3.884 | |
| WIND-1_GRU | Longdong | 1, 140 | 1.315 | 1, 150 | 1.803 | 2, 150 | 2.570 |
| Liuqiu | 1, 80 | 1.631 | 1, 90 | 2.576 | 1, 110 | 3.532 | |
| Model | Buoy | Lead Time (h) | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| t + 1 | t + 3 | t + 6 | ||||||||
| Parameters with Metrics | Structure, Size | Layers, Neurons | RMSE (m/s) | Structure, Size | Layers, Neurons | RMSE (m/s) | Structure, Size | Layers, Neurons | RMSE (m/s) | |
| WIND-2_dense | Longdong | VGG16, 96 | 3, 2300 | 1.312 | CNN5_3, 96 | 3, 2600 | 1.401 | CNN5_4, 128 | 4, 2500 | 2.473 |
| Liuqiu | VGG16, 128 | 3, 1800 | 1.327 | CNN5_3, 128 | 4, 2000 | 1.869 | CNN5_3, 128 | 4, 2400 | 3.013 | |
| WIND-2_GRU | Longdong | CNN5_3, 96 | 3, 2600 | 1.103 | CNN5_3, 96 | 3, 2700 | 1.384 | CNN5_4, 128 | 3, 3000 | 2.112 |
| Liuqiu | CNN5_3, 128 | 3, 2400 | 1.292 | CNN5_3, 128 | 3, 2500 | 1.801 | CNN5_4, 128 | 4, 2100 | 2.786 | |
| Model | Buoy | Lead Time (h) | |||||
|---|---|---|---|---|---|---|---|
| t + 1 | t + 3 | t + 6 | |||||
| Parameters with Metrics | Layers, Neurons | RMSE (m) | Layers, Neurons | RMSE (m) | Layers, Neurons | RMSE (m) | |
| WAVE-1_dense | Longdong | 2, 80 | 0.594 | 3, 100 | 0.961 | 3, 80 | 1.301 |
| Liuqiu | 1, 60 | 0.481 | 3, 110 | 0.868 | 3, 110 | 1.418 | |
| WAVE-1_GRU | Longdong | 1, 90 | 0.573 | 2, 130 | 0.903 | 2, 100 | 1.187 |
| Liuqiu | 1, 60 | 0.443 | 2, 90 | 0.842 | 2, 120 | 1.202 | |
| WAVE-2_dense | Longdong | 2, 100 | 0.456 | 2, 120 | 0.831 | 4, 100 | 0.991 |
| Liuqiu | 2, 60 | 0.368 | 3, 110 | 0.887 | 3, 120 | 1.238 | |
| WAVE-2_GRU | Longdong | 1, 110 | 0.447 | 2, 90 | 0.802 | 2, 100 | 0.902 |
| Liuqiu | 1, 70 | 0.350 | 2, 100 | 0.868 | 2, 110 | 1.021 | |
| WAVE-3_dense | Longdong | 2, 120 | 0.433 | 3, 90 | 0.782 | 4, 120 | 0.955 |
| Liuqiu | 2, 100 | 0.372 | 3, 100 | 0.822 | 4, 110 | 0.979 | |
| WAVE-3_GRU | Longdong | 2, 100 | 0.401 | 3, 100 | 0.748 | 3, 170 | 0.928 |
| Liuqiu | 1, 120 | 0.348 | 2, 110 | 0.786 | 3, 180 | 0.948 | |
| Model | Buoy | Lead Time (h) | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| t + 1 | t + 3 | t + 6 | ||||||||
| Parameters with Metrics | Structure, Size | Layers, Neurons | RMSE (m) | Structure, Size | Layers, Neurons | RMSE (m) | Structure, Size | Layers, Neurons | RMSE (m) | |
| WAVE-4_dense | Longdong | CNN5_3, 96 | 2, 2200 | 0.358 | CNN5_4, 96 | 4, 1500 | 0.746 | CNN5_4, 128 | 4, 1600 | 0.876 |
| Liuqiu | VGG16, 96 | 2, 1900 | 0.321 | CNN5_3, 128 | 3, 1900 | 0.723 | CNN5_4, 128 | 4, 1500 | 0.941 | |
| WAVE-4_GRU | Longdong | CNN5_4, 96 | 3, 2100 | 0.347 | CNN5_3, 128 | 4, 1400 | 0.728 | CNN5_4, 128 | 4, 1700 | 0.844 |
| Liuqiu | CNN5_4, 128 | 2, 2300 | 0.309 | CNN5_3, 128 | 3, 2100 | 0.705 | CNN5_4, 128 | 4, 1800 | 0.919 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wei, C.-C.; Chang, H.-C. Forecasting of Typhoon-Induced Wind-Wave by Using Convolutional Deep Learning on Fused Data of Remote Sensing and Ground Measurements. Sensors 2021, 21, 5234. https://doi.org/10.3390/s21155234
Wei C-C, Chang H-C. Forecasting of Typhoon-Induced Wind-Wave by Using Convolutional Deep Learning on Fused Data of Remote Sensing and Ground Measurements. Sensors. 2021; 21(15):5234. https://doi.org/10.3390/s21155234
Chicago/Turabian StyleWei, Chih-Chiang, and Hao-Chun Chang. 2021. "Forecasting of Typhoon-Induced Wind-Wave by Using Convolutional Deep Learning on Fused Data of Remote Sensing and Ground Measurements" Sensors 21, no. 15: 5234. https://doi.org/10.3390/s21155234
APA StyleWei, C. -C., & Chang, H. -C. (2021). Forecasting of Typhoon-Induced Wind-Wave by Using Convolutional Deep Learning on Fused Data of Remote Sensing and Ground Measurements. Sensors, 21(15), 5234. https://doi.org/10.3390/s21155234