
Automatic, Qualitative Scoring of the Clock Drawing Test (CDT) Based on U-Net, CNN and Mobile Sensor Data

Abstract
:1. Introduction
2. Materials and Methods
2.1. Subjects
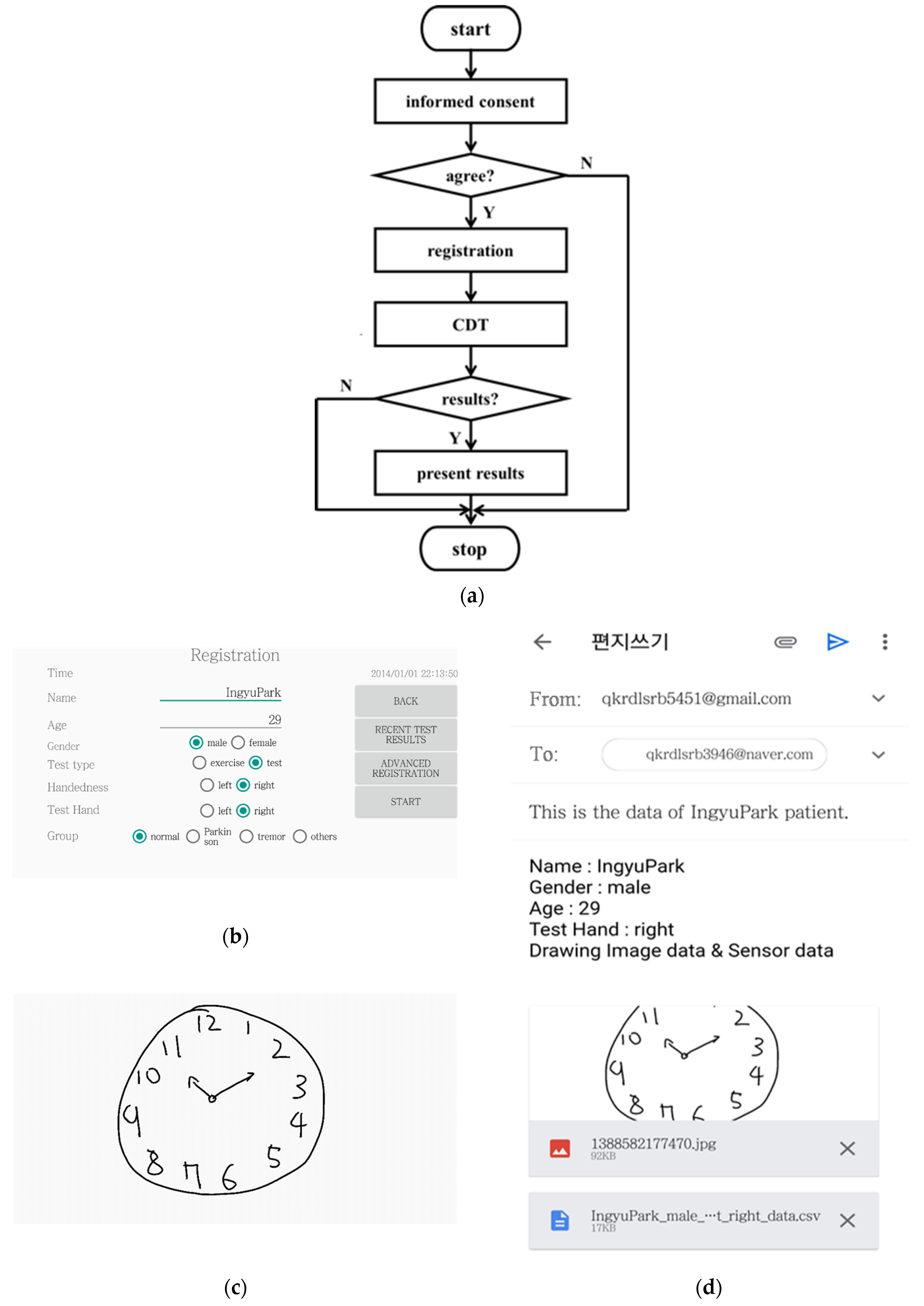
2.2. Implementation of the Deep Learning Based Mobile Clock Drawing Test, mCDT
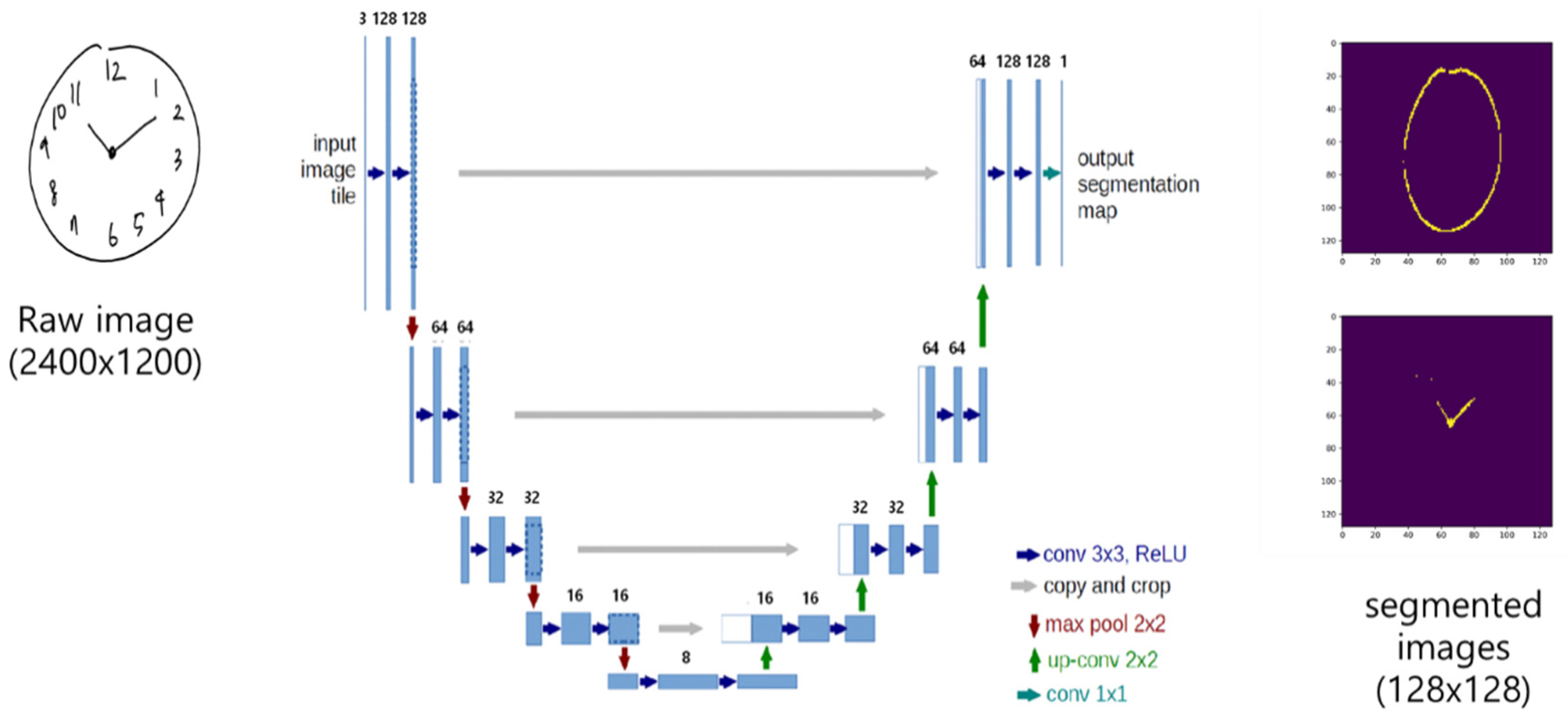
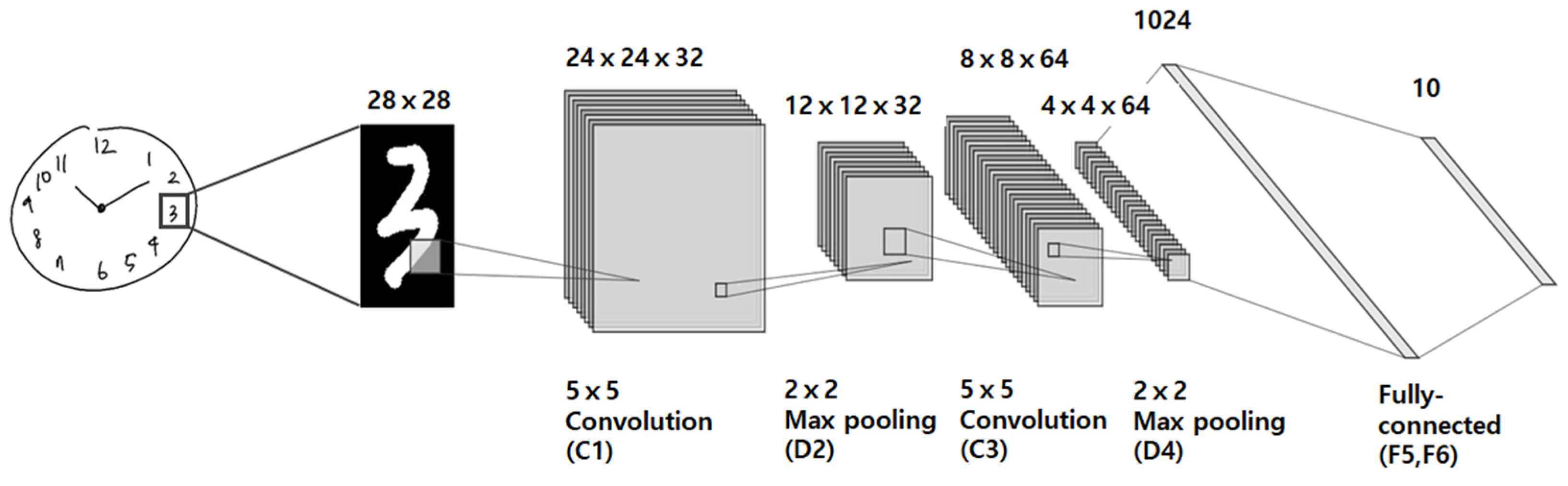
2.3. Pre-Trained Models, DeepC, DeepH and DeepN Based on the U-Net and the CNN
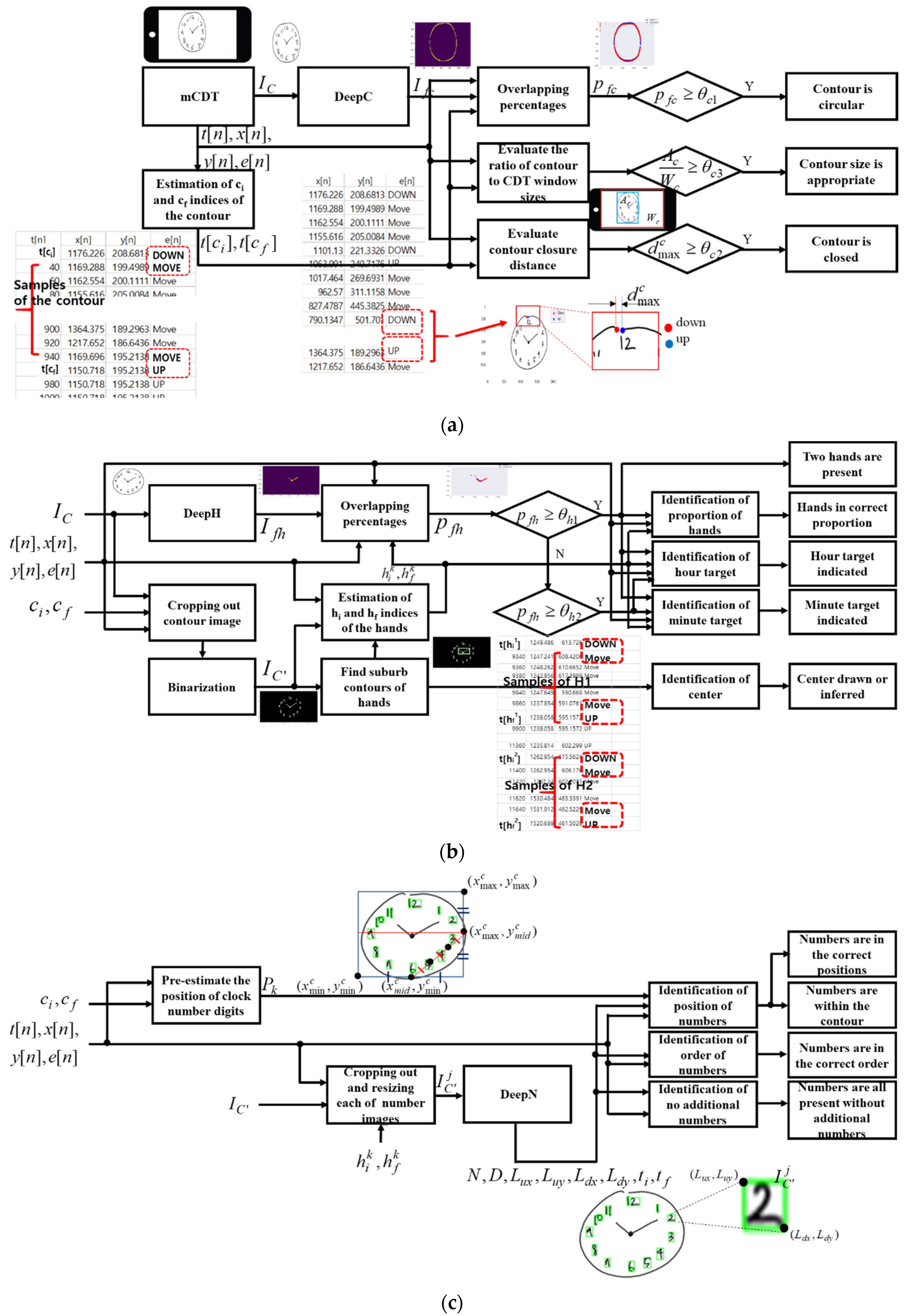
2.4. Scoring Method of mCDT
2.4.1. Scoring on Criteria of Contour Parameter
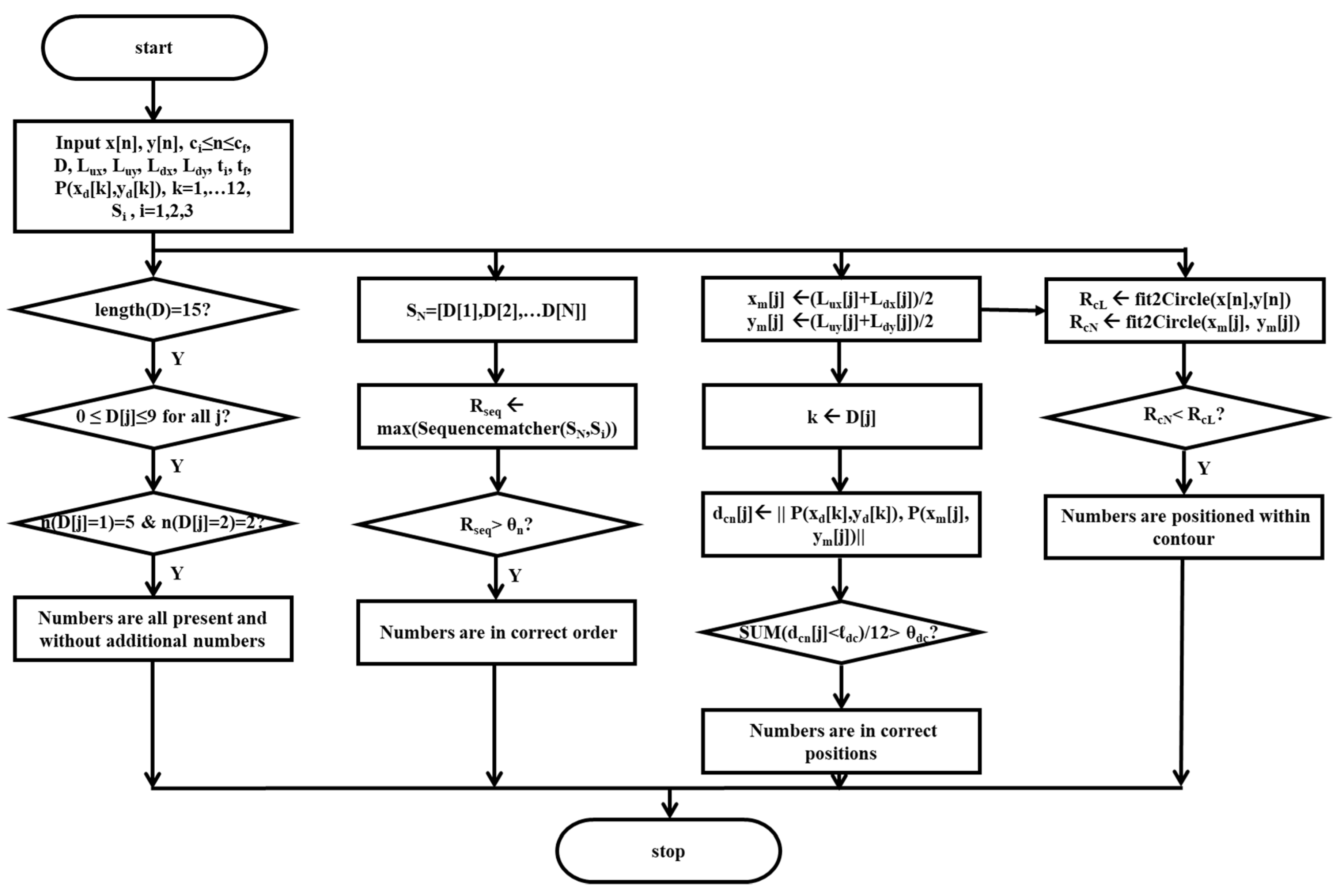
2.4.2. Scoring on Criteria of Numbers Parameter
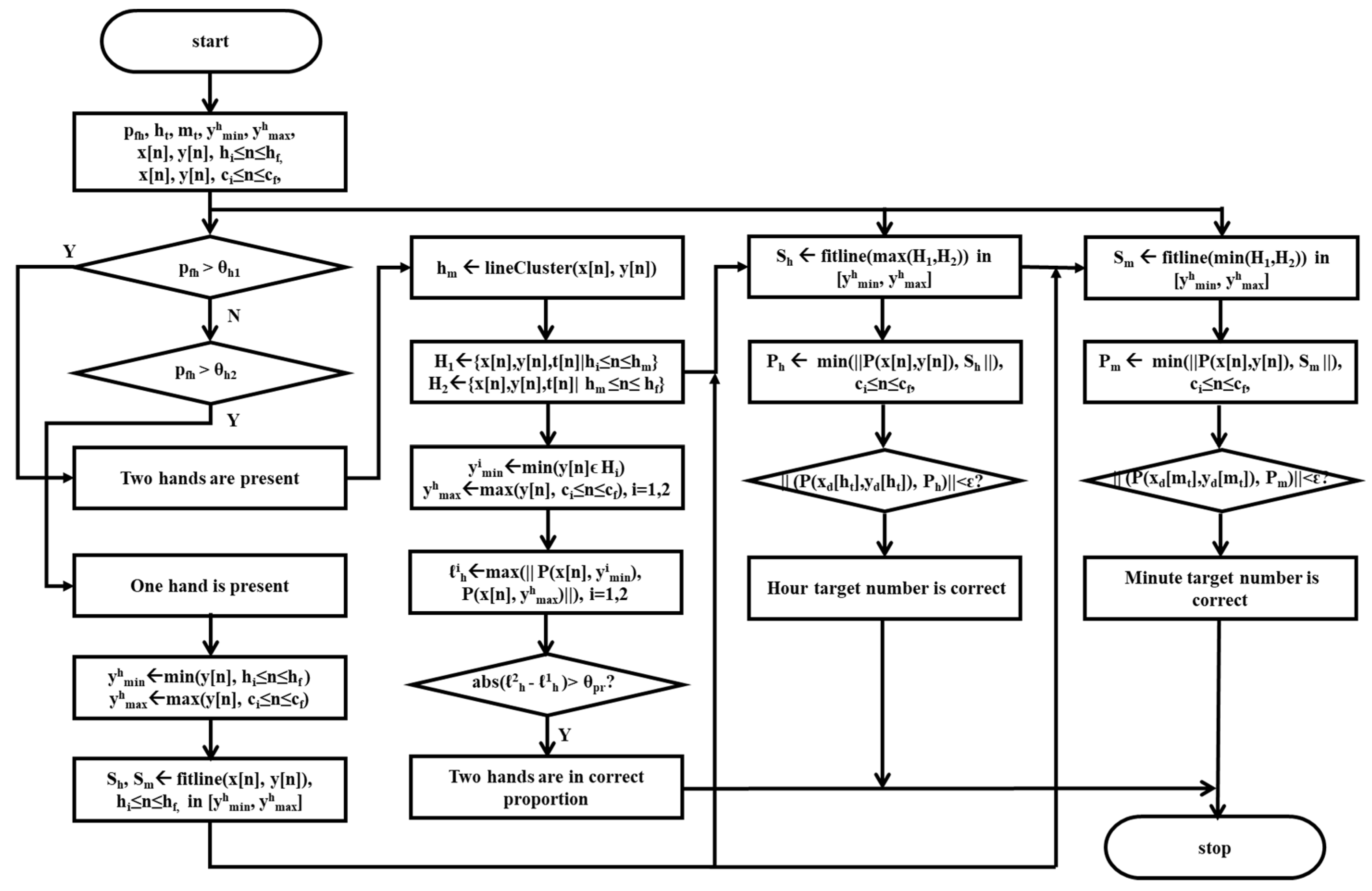
2.4.3. Scoring on Criteria of Hands Parameter
2.4.4. Scoring Criteria of Center Parameter
2.4.5. Assignment of Scores
3. Results
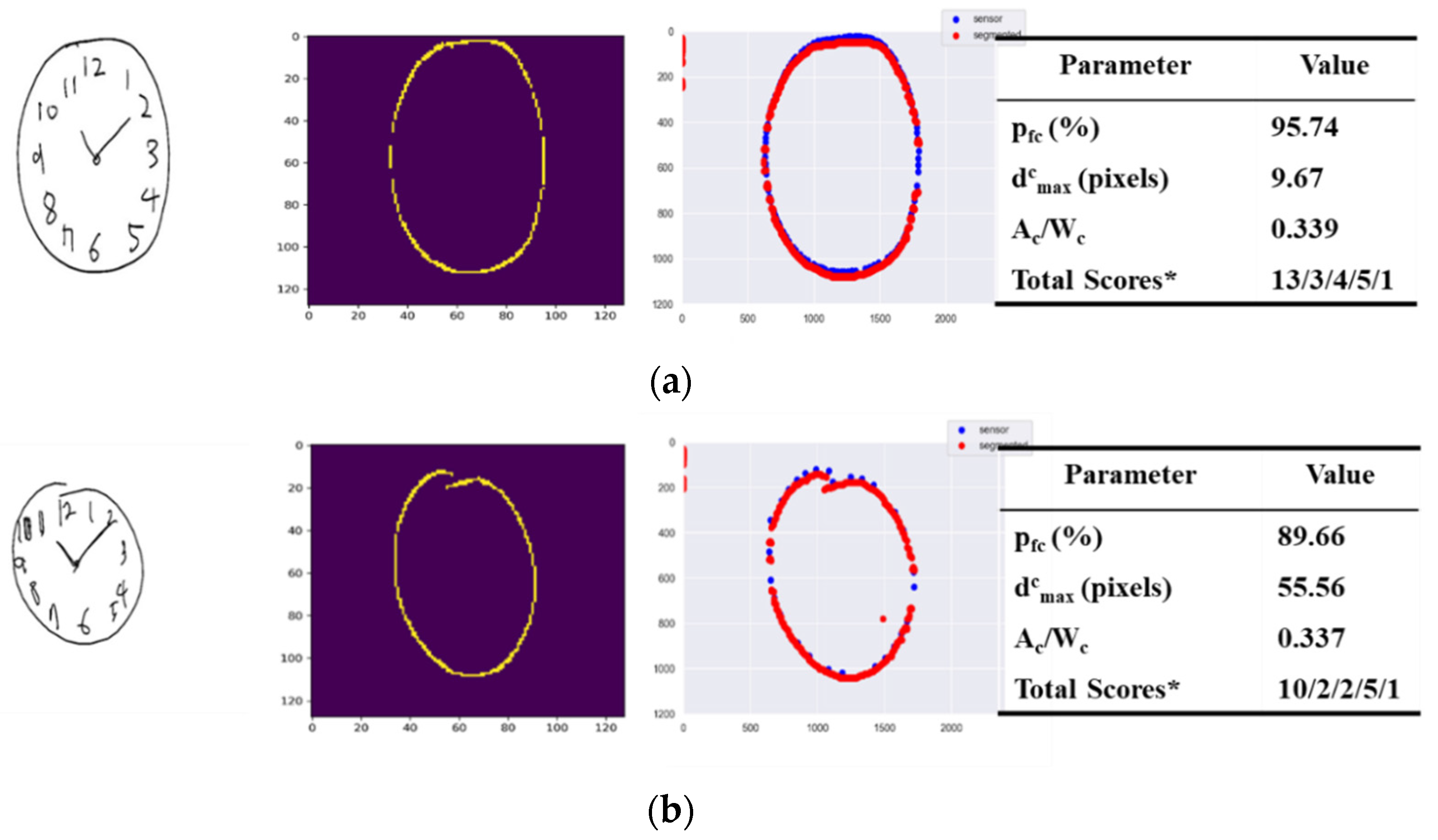
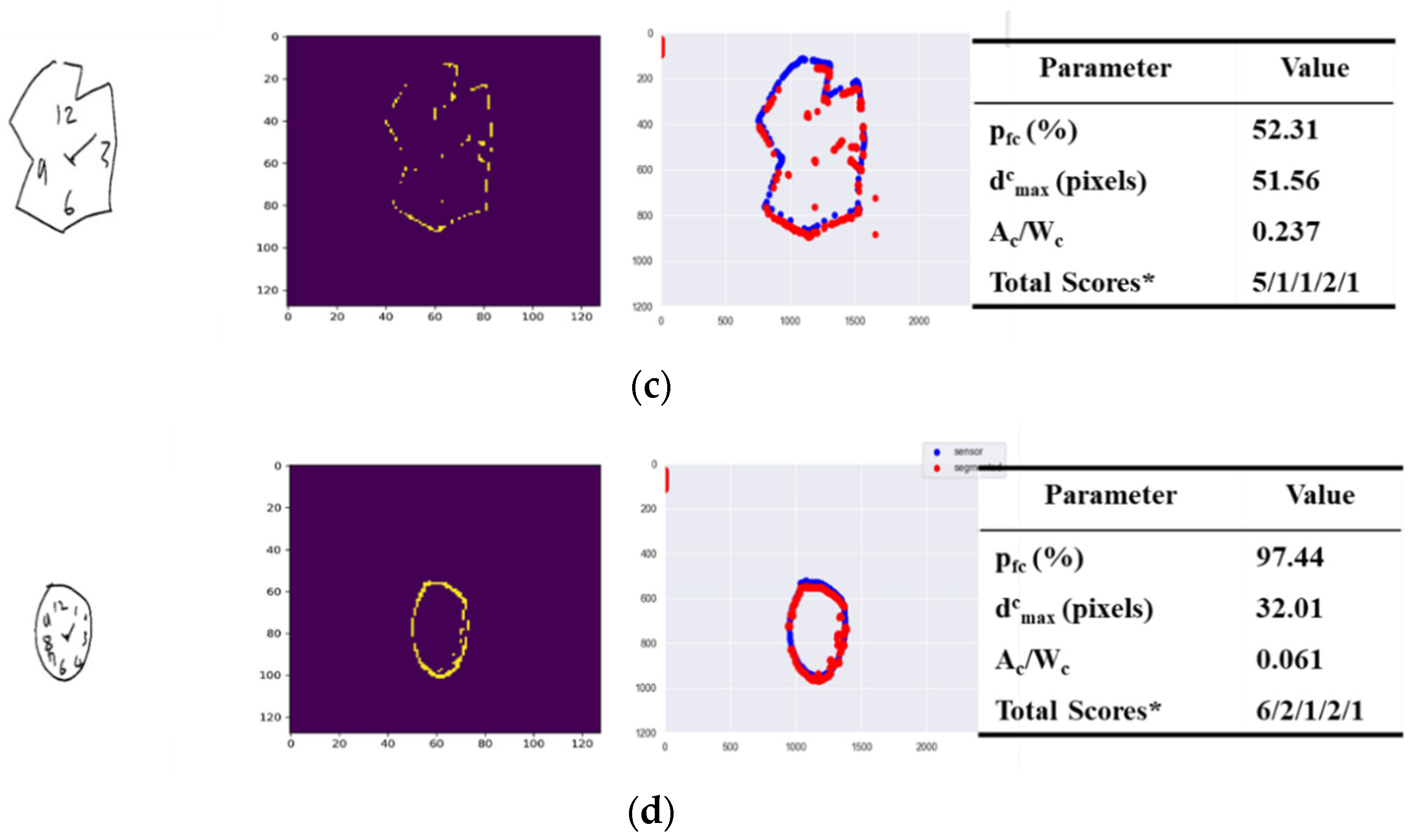
3.1. Scoring on Criteria of Contour Parameter
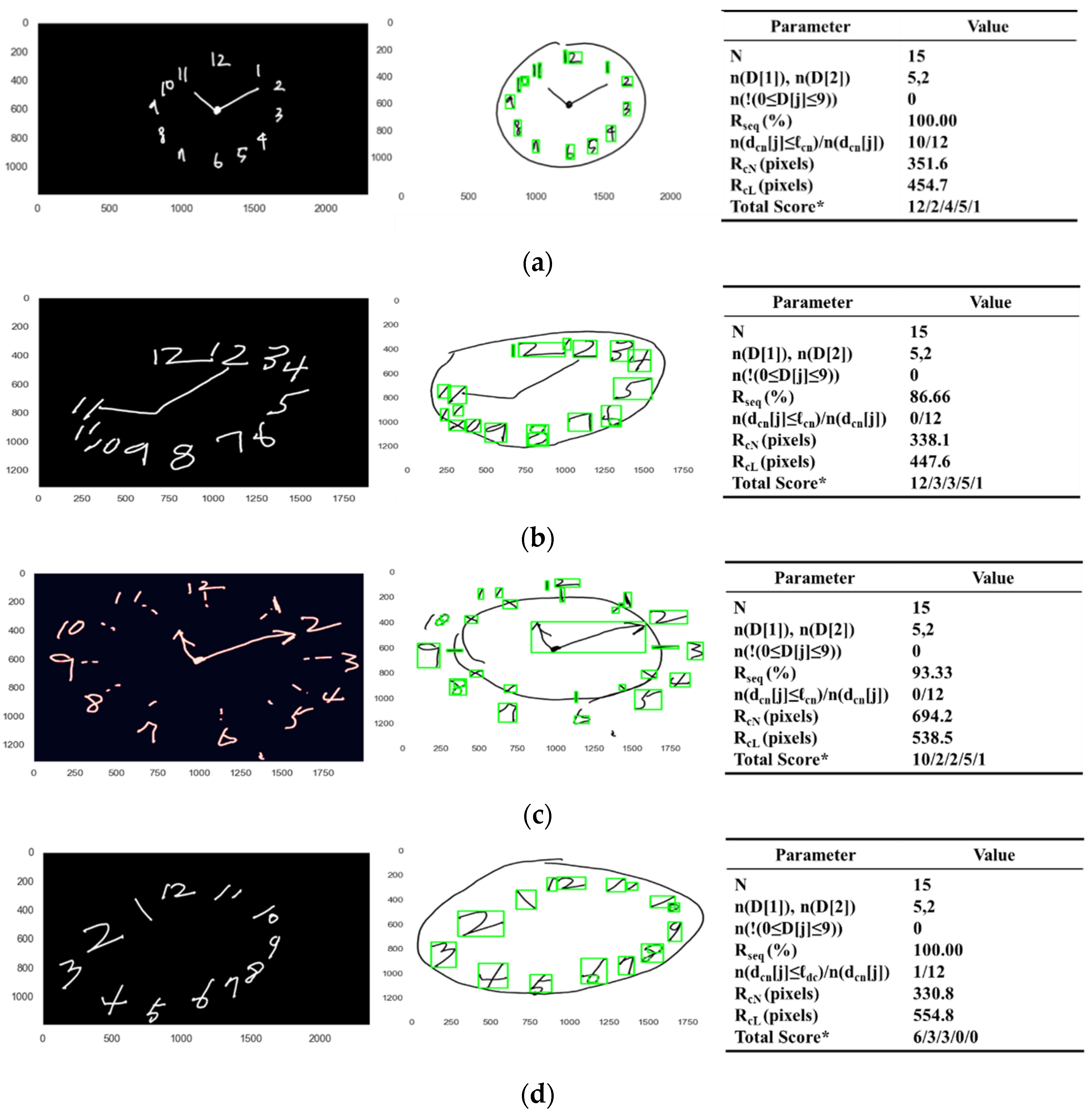
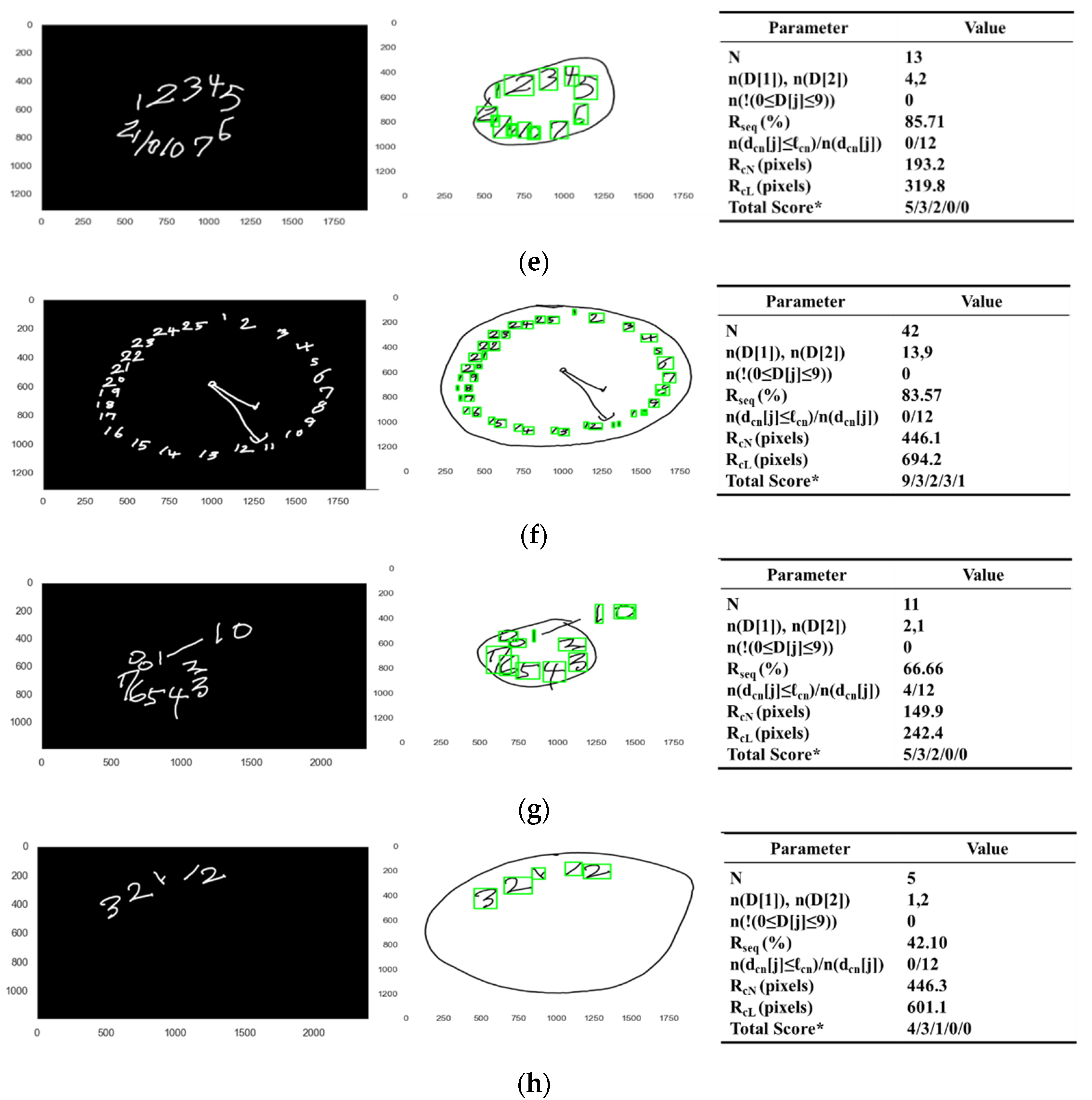
3.2. Scoring on Criteria of Number Parameter
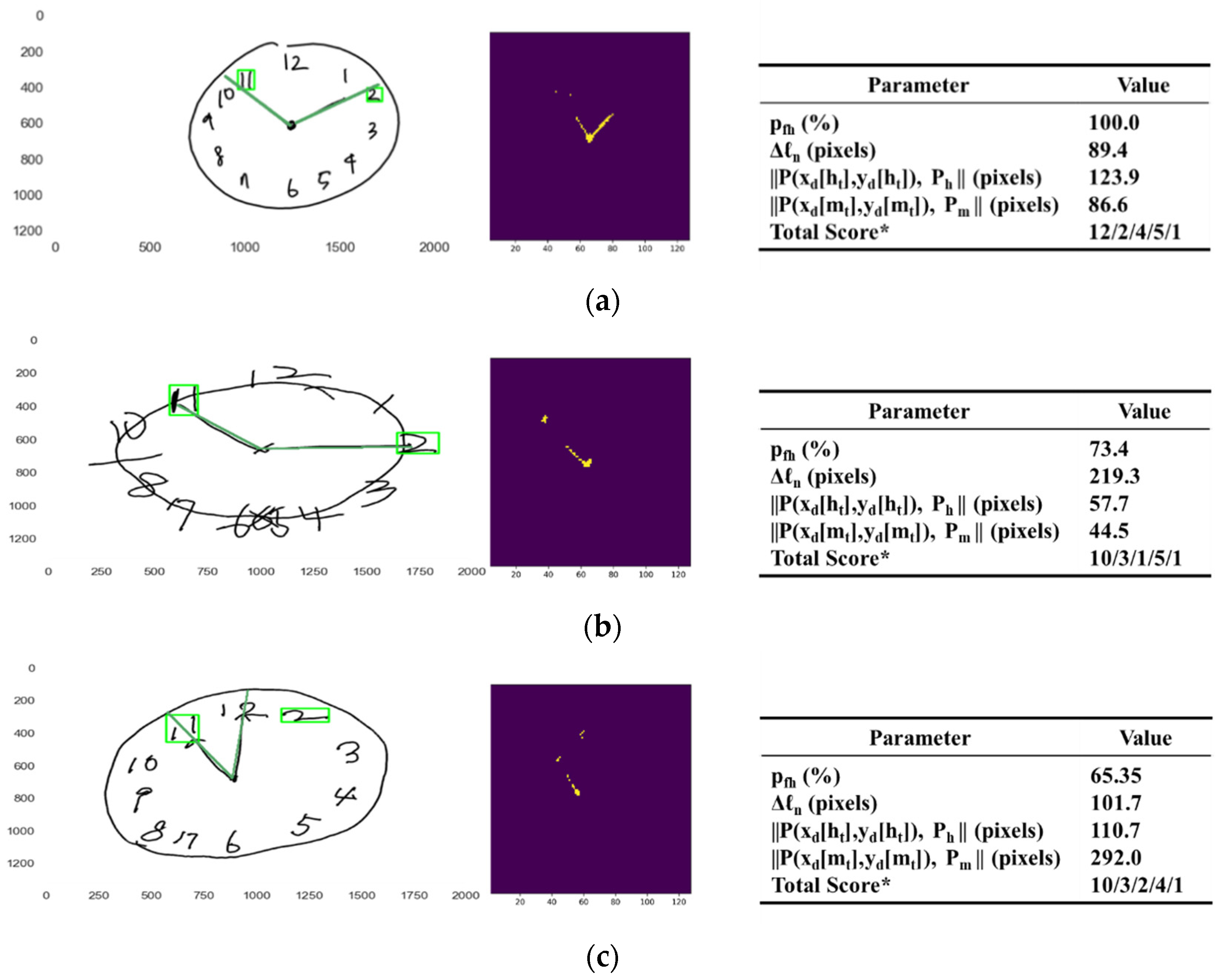
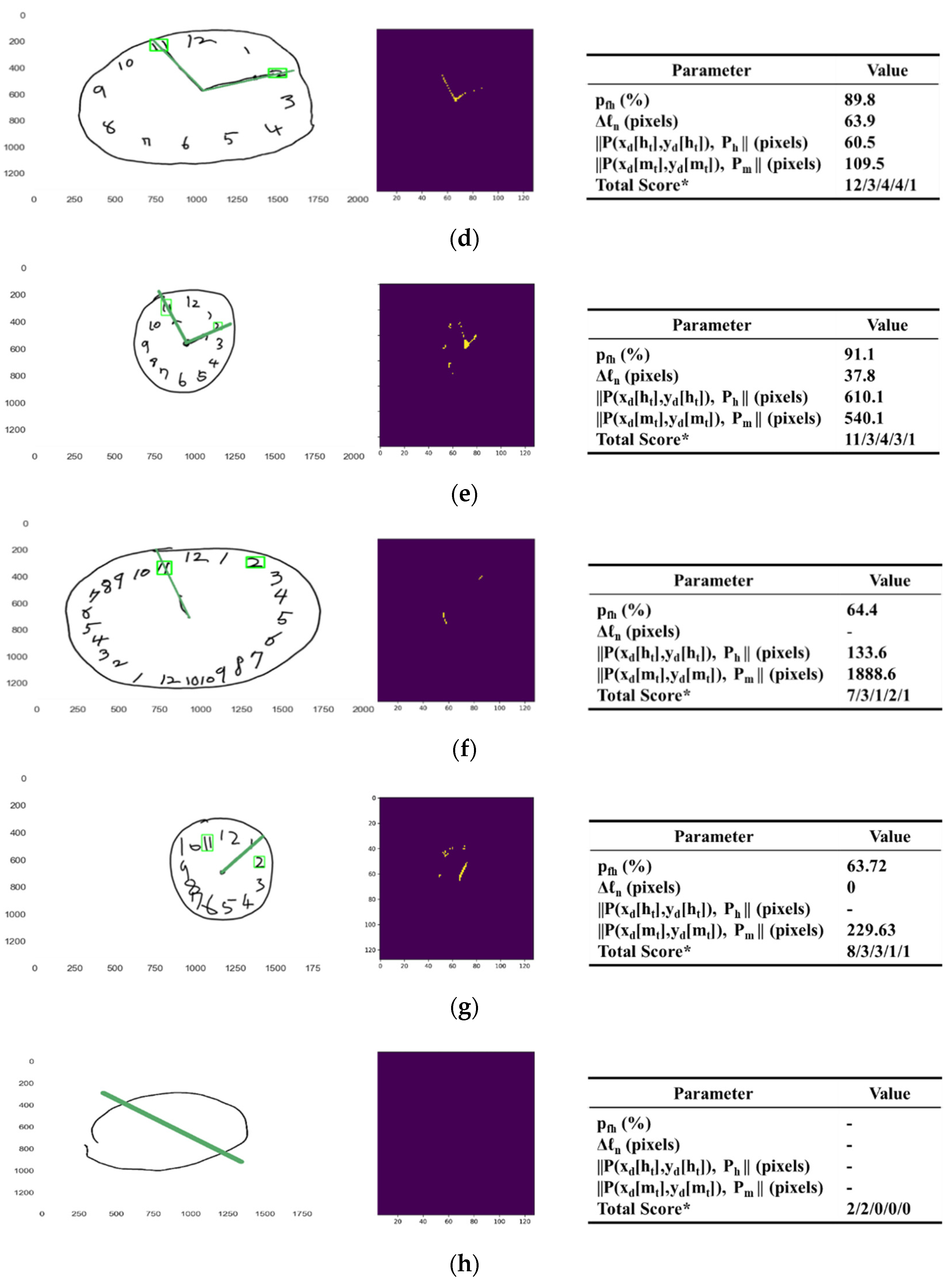
3.3. Scoring on Criteria of Hand Parameter
3.4. Scoring on Criteria of Center Parameter
3.5. Performance Test Result
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Biundo, R.; Weis, L.; Bostantjopoulou, S.; Stefanova, E.; Falup-Pecurariu, C.; Kramberger, M.G.; Geurtsen, G.J.; Antonini, A.; Weintraub, D.; Aarsland, D. MMSE and MoCA in Parkinson’s disease and dementia with Lewy bodies: A multicenter 1-year follow-up study. J. Neural. Transm. 2016, 123, 431–438. [Google Scholar] [CrossRef] [Green Version]
- Mittal, C.; Gorthi, S.P.; Rohatgi, S. Early Cognitive Impairment: Role of Clock Drawing Test. Med. J. Armd. Forces India 2010, 66, 25–28. [Google Scholar] [CrossRef] [Green Version]
- Aprahamian, I.; Martinelli, J.E.; Neri, A.L.; Yassuda, M.S. The Clock Drawing Test: A review of its accuracy in screening for dementia. Dement. Neuropsychol. 2009, 3, 74–81. [Google Scholar] [CrossRef]
- Youn, Y.C.; Pyun, J.-M.; Ryu, N.; Baek, M.J.; Jang, J.-W.; Park, Y.H.; Ahn, S.-W.; Shin, H.-W.; Park, K.-Y.; Kim, S.Y. Use of the Clock Drawing Test and the Rey–Osterrieth Complex Figure Test-copy with convolutional neural networks to predict cognitive impairment. Alzheimer’s Res. Ther. 2021, 13, 1–7. [Google Scholar] [CrossRef]
- Straus, S.H. Use of the automatic clock drawing test to rapidly screen for cognitive impairment in older adults, drivers, and the physically challenged. J. Am. Geriatr. Soc. 2007, 55, 310–311. [Google Scholar] [CrossRef] [PubMed]
- Chen, S.; Stromer, D.; Alabdalrahim, H.A.; Schwab, S.; Weih, M.; Maier, A. Automatic dementia screening and scoring by applying deep learning on clock-drawing tests. Sci. Rep. 2020, 10, 1–11. [Google Scholar] [CrossRef]
- Park, I.; Kim, Y.J.; Kim, Y.J.; Lee, U. Automatic, Qualitative Scoring of the Interlocking Pentagon Drawing Test (PDT) Based on U-Net and Mobile Sensor Data. Sensors 2020, 20, 1283. [Google Scholar] [CrossRef] [Green Version]
- Mann, D.L. Heart Failure: A Companion to Braunwald’s Heart Disease; Elsevier: Amsterdam, The Netherlands, 2011. [Google Scholar] [CrossRef]
- Spenciere, B.; Alves, H.; Charchat-Fichman, H. Scoring systems for the Clock Drawing Test: A historical review. Dement. Neuropsychol. 2017, 11, 6–14. [Google Scholar] [CrossRef] [Green Version]
- Eknoyan, D.; Hurley, R.A.; Taber, K.H. The Clock Drawing Task: Common Errors and Functional Neuroanatomy. J. Neuropsychiatry Clin. Neurosci. 2012, 24, 260–265. [Google Scholar] [CrossRef]
- Talwar, N.A.; Churchill, N.W.; Hird, M.A.; Pshonyak, I.; Tam, F.; Fischer, C.E.; Graham, S.J.; Schweizer, T.A. The Neural Correlates of the Clock-Drawing Test in Healthy Aging. Front. Hum. Neurosci. 2019, 13, 25. [Google Scholar] [CrossRef]
- Yuan, J.; Libon, D.J.; Karjadi, C.; Ang, A.F.; Devine, S.; Auerbach, S.H.; Au, R.; Lin, H. Association Between the Digital Clock Drawing Test and Neuropsychological Test Performance: Large Community-Based Prospective Cohort (Framingham Heart Study). J. Med. Internet Res. 2021, 23, e27407. [Google Scholar] [CrossRef] [PubMed]
- Shulman, K. Clock-drawing: Is it the ideal cognitive screening test? Int. J. Geriatr. Psychiatry 2000, 15, 548–561. [Google Scholar] [CrossRef]
- Sunderland, T.; Hill, J.L.; Mellow, A.M.; Lawlor, B.A.; Gundersheimer, J.; Newhouse, P.A.; Grafman, J.H. Clock drawing in Alzheimer’s disease. Nov. Meas. Dement. Sev. J. Am. Geriatr Soc. 1989, 37, 725–729. [Google Scholar] [CrossRef] [PubMed]
- Nasreddine, Z.S.; Phillips, N.A.; Bédirian, V.; Charbonneau, S.; Whitehead, V.; Collin, I. The Montreal Cognitive Assessment, MoCA: A brief screening tool for mild cognitive impairment. J. Am. Geriatr Soc 2005, 53, 695–699. [Google Scholar] [CrossRef]
- Souillard-Mandar, W.; Davis, R.; Rudin, C.; Au, R.; Libon, D.J.; Swenson, R.; Price, C.C.; Lamar, M.; Penney, D.L. Learning Classification Models of Cognitive Conditions from Subtle Behaviors in the Digital Clock Drawing Test. Mach. Learn. 2016, 102, 393–441. [Google Scholar] [CrossRef]
- Nirjon, S.; Emi, I.A.; Mondol, A.S.; Salekin, A.; Stankovic, J.A. MOBI-COG: A Mobile Application for Instant Screening of Dementia Using the Mini-Cog Test. In Proceedings of the Wireless Health 2014 on National Institutes of Health, Bethesda, MD, USA, 1–7 October 2014. [Google Scholar] [CrossRef]
- Fabricio, A.T.; Aprahamian, I.; Yassuda, M.S. Qualitative analysis of the Clock Drawing Test by educational level and cognitive profile. Arq. Neuropsiquiatr. 2014, 72, 289–295. [Google Scholar] [CrossRef] [Green Version]
- Borson, S.; Scanlan, J.; Brush, M.; Vitaliano, P.; Dokmak, A. The mini-cog: A cognitive “vital signs” measure for dementia screening in multi-lingual elderly. Int. J. Geriatr. Psychiatry 2000, 15, 1021–1027. [Google Scholar] [CrossRef]
- Harbi, Z.; Hicks, Y.; Setchi, R. Clock Drawing Test Interpretation System. Procedia Comput. Sci. 2017, 112, 1641–1650. [Google Scholar] [CrossRef]
- Kim, H.; Cho, Y.S.; Do, E.I. Computational clock drawing analysis for cognitive impairment screening. In Proceedings of the Fifth International Conference on Tangible, Embedded, and Embodied Interaction; Gross, M.D., Ed.; ACM: New York, NY, USA, 2011; pp. 297–300. [Google Scholar]
- Caffarraa, P.; Gardinia, S.; Diecib, F.; Copellib, S.; Maseta, L.; Concaria, L.; Farinac, E.; Grossid, E. The qualitative scoring MMSE pentagon test (QSPT): A new method for differentiating dementia with Lewy Body from Alzheimer’s Disease. Behav. Neurol. 2013, 27, 213–220. [Google Scholar] [CrossRef]
- Davis, R.; Libon, D.; Au, R.; Pitman, D.; Penney, D. Think: Inferring cognitive status from subtle behaviors. IEEE Int. Conf. Robot. Autom. 2014, 2898–2905. Available online: https://www.ncbi.nlm.nih.gov/pmc/articles/PMC4825804/ (accessed on 2 August 2021). [CrossRef] [Green Version]
- Manos, P.J.; Wu, R. The Ten Point Clock Test: A Quick Screen and Grading Method for Cognitive Impairment in Medical and Surgical Patients. Int. J. Psychiatry Med. 1994, 24, 229–244. [Google Scholar] [CrossRef] [PubMed]
- Royall, D.R.; Cordes, J.A.; Polk, M. CLOX: An executive clock drawing task. J. Neurol. Neurosurg. Psychiatry 1998, 64, 588–594. [Google Scholar] [CrossRef] [PubMed]
- Rouleau, I.; Salmon, D.P.; Butters, N.; Kennedy, C.; McGuire, K. Quantitative and qualitative analyses of clock drawings in Alzheimer’s and Huntington’s disease. Brain Cogn. 1992, 18, 70–87. [Google Scholar] [CrossRef]
- Muayqil, T.A.; Tarakji, A.R.; Khattab, A.M.; Balbaid, N.T.; Al-Dawalibi, A.M.; AlQarni, S.A.; Hazazi, R.A.; Alanazy, M.H. Comparison of Performance on the Clock Drawing Test Using Three Different Scales in Dialysis Patients. Behav. Neurol. 2020, 2020, 1–7. [Google Scholar] [CrossRef] [PubMed]
- Shao, K.; Dong, F.; Guo, S.; Wang, W.; Zhao, Z.; Yang, Y.; Wang, P.; Wang, J. Clock-drawing test: Normative data of three quantitative scoring methods for Chinese-speaking adults in Shijiazhuang City and clinical utility in patients with acute ischemic stroke. Brain Behav. 2020, 10, e01806. [Google Scholar] [CrossRef]
- De Pandis, M.F.; Galli, M.; Vimercati, S.; Cimolin, V.; De Angelis, M.V.; Albertini, G. A New Approach for the Quantitative Evaluation of the Clock Drawing Test: Preliminary Results on Subjects with Parkinson’s Disease. Neurol. Res. Int. 2010, 2010, 1–6. [Google Scholar] [CrossRef] [Green Version]
- Guha, A.; Kim, H.; Do, E.Y. Automated Clock Drawing Test through Machine Learning and Geometric Analysis. In Proceedings of the 16th International Conference on Distributed Multimedia Systems, DMS 2010, Hyatt Lodge at McDonald’s Campus, Oak Brook, IL, USA, 14–16 October 2010. [Google Scholar]
- William, S.; Randall, D.; Cynthia, R.; Rhoda, A.; Dana, L.P. Interpretable Machine Learning Models for the Digital Clock Drawing Test. In Proceedings of the 2016 ICML Workshop on Human Interpretability in Machine Learning (WHI 2016), New York, NY, USA, 23 June 2016. [Google Scholar]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep residual learning for image recognition. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 770–778. [Google Scholar]
- Huang, G.; Liu, Z.; Weinberger, K.Q. Densely Connected Convolutional Networks. 2016. Available online: http://arxiv.org/abs/1608.06993 (accessed on 2 August 2021).
- Folstein, M.F.; Folstein, S.E.; McHugh, P.R. mini-mental state: A practical method for grading the cognitive state of patients for the clinician. J. Psychiatr. Res. 1975, 12, 189–198. [Google Scholar] [CrossRef]
- Available online: https://docs.opencv.org/3.4/df/d0d/tutorial_find_contours.html (accessed on 2 August 2021).
- Available online: https://www.kite.com/python/docs/difflib.SequenceMatcher (accessed on 2 August 2021).
- Available online: https://numpy.org/doc/stable/reference/generated/numpy.polyfit.html (accessed on 2 August 2021).
- Available online: https://pythonprogramming.net/how-to-program-best-fit-line-machine-learning-tutorial/ (accessed on 2 August 2021).
- Freedman, M.; Leach, L.; Kaplan, E.; Winocur, G.; Shulman, K.I.; Delis, D. Clock Drawing: A Neuropsychological Analysis; Oxford University Press, Inc.: Oxford, UK, 1994. [Google Scholar]
- Mendes-Santos, L.C.; Mograbi, D.; Spenciere, B.; Charchat-Fichman, H. Specific algorithm method of scoring the Clock Drawing Test applied in cognitively normal elderly. Dement. Neuropsychol. 2015, 9, 128–135. [Google Scholar] [CrossRef] [Green Version]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Training Set | Test Set | ||
|---|---|---|---|
| Volunteers (n = 159) | Volunteers (n = 79) | PD Patients (n = 140) | |
| Age | 24.78 ± 1.63 | 22.81 ± 0.79 | 75.09 ± 8.57 |
| Male (female) | 112 (45) | 35 (44) | 76 (64) |
| Binary CDT score Pass (Non-pass) | 159 (0) | 75 (4) | 73 (67) |
| Parameters | Scoring Criteria |
|---|---|
| Contour | Contour is circular |
| Contour is closed | |
| Contour size is appropriate | |
| Numbers | Numbers are all present without additional numbers |
| Numbers are in the corrected order | |
| Numbers are in the correct positions | |
| Numbers are within the contour | |
| Hands | Two hands are present |
| One hand is present | |
| Hour target number is indicated | |
| Minute target number is indicated | |
| Hands are in correct proportion | |
| Center | A center is drawn or inferred |
| Total | 0–13 scores |
| Number Digit k | Formula | |
|---|---|---|
| 1 | ||
| 2 | ||
| 3 | ||
| 4 | ||
| 5 | ||
| 6 | ||
| 7 | ||
| 8 | ||
| 9 | ||
| 10 | ||
| 11 | ||
| 12 | ||
| Parameters | Criteria | Conditions (Scoring Method) * |
| Contour | circular contour | 1 |
| closed contour | 2 | |
| appropriately sized contour | 3 | |
| Numbers | all and no additional numbers | & for all j & n(D[j] = 1) = 5 & n(D[j] = 2) = 2 |
| correct order of numbers | 4 | |
| correct position of numbers | ||
| positioning of numbers within contour | , | |
| Hands | two hands | 7 |
| one hand | 8 | |
| correct proportion of hands | & 9 | |
| correct hour target number | 10 | |
| correct minute target number | ||
| Center | existence or inference of a center | or 11 |
| Total sum | 13 |
| Parameter | Criteria | Frequency Count (%) | Errors in Estimation Count (%) |
|---|---|---|---|
| Contour | Contour is circular | 217(99.08) | 6(2.76) |
| Contour is closed | 178(81.27) | 13(7.30) | |
| Contour size is appropriate | 215(98.17) | 1(0.46) | |
| Numbers | Numbers are all present without additional numbers | 153(69.86) | 11(7.18) |
| Numbers are in corrected order | 181(82.64) | 5(2.76) | |
| Numbers are in the correct positions | 88(40.18) | 2(2.27) | |
| Numbers are within the contour | 202(92.23) | 2(0.99) | |
| Hands | Two hands are present | 171(78.08) | 13(7.60) |
| One hand is present | 181(82.64) | 6(3.31) | |
| Hands are in correct proportion | 170(77.62) | 13(7.64) | |
| Hour target number is indicated | 153(69.86) | 1(0.65) | |
| Minute target number is indicated | 149(68.03) | 6(4.02) | |
| Center | A center is drawn or inferred | 190(86.75) | 3(1.57) |
| Scores | Contour | Numbers | Hands | Center |
|---|---|---|---|---|
| 5 | - | - | 144 (70/74) | - |
| 4 | - | 81 (53/28) | 11 (3/8) | - |
| 3 | 175 (74/101) | 71 (23/48) | 15 (6/9) | - |
| 2 | 42 (5/37) | 30 (3/27) | 4 (0/4) | - |
| 1 | 1 (0/1) | 27 (0/27) | 7 (0/7) | 190 (79/111) |
| 0 | 1 (0/1) | 10 (0/10) | 38 (0/38) | 29 (0/29) |
| Total | 219 (79/140) | 219 (79/140) | 219 (79/140) | 219 (79/140) |
| Contour | Numbers | Hands | Center | |
|---|---|---|---|---|
| TP | 159 (70/89) | 77 (50/27) | 130 (66/64) | 187 (79/108) |
| FP | 3 (2/1) | 5 (4/1) | 3 (3/0) | 4 (0/4) |
| FN | 19 (4/15) | 19 (5/14) | 25 (4/21) | 3 (0/3) |
| TN | 38 (3/35) | 118 (20/98) | 61 (6/55) | 25 (0/25) |
| Sensitivity | 89.33 (94.60/85.58) | 80.21 (90.91/65.85) | 83.87 (94.29/75.29) | 98.42 (100.00/97.30) |
| Specificity | 92.68 (60.00/97.22) | 95.93 (83.33/98.99) | 95.31 (66.67/100.00) | 86.21 (-/86.21) |
| Accuracy | 89.95 (92.41/88.57) | 89.04 (88.61/89.29) | 87.21 (91.14/85.00) | 96.80 (100.00/95.00) |
| Precision | 98.15 (97.22/98.89) | 93.90 (92.59/96.43) | 97.74 (95.65/100.00) | 97.91 (100.00/96.43) |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Park, I.; Lee, U. Automatic, Qualitative Scoring of the Clock Drawing Test (CDT) Based on U-Net, CNN and Mobile Sensor Data. Sensors 2021, 21, 5239. https://doi.org/10.3390/s21155239
Park I, Lee U. Automatic, Qualitative Scoring of the Clock Drawing Test (CDT) Based on U-Net, CNN and Mobile Sensor Data. Sensors. 2021; 21(15):5239. https://doi.org/10.3390/s21155239
Chicago/Turabian StylePark, Ingyu, and Unjoo Lee. 2021. "Automatic, Qualitative Scoring of the Clock Drawing Test (CDT) Based on U-Net, CNN and Mobile Sensor Data" Sensors 21, no. 15: 5239. https://doi.org/10.3390/s21155239
APA StylePark, I., & Lee, U. (2021). Automatic, Qualitative Scoring of the Clock Drawing Test (CDT) Based on U-Net, CNN and Mobile Sensor Data. Sensors, 21(15), 5239. https://doi.org/10.3390/s21155239