
Wearable Feet Pressure Sensor for Human Gait and Falling Diagnosis

 ,
,  ,
,  ,
, 
Abstract
:1. Introduction
2. Formulation of the Research
3. Experiments
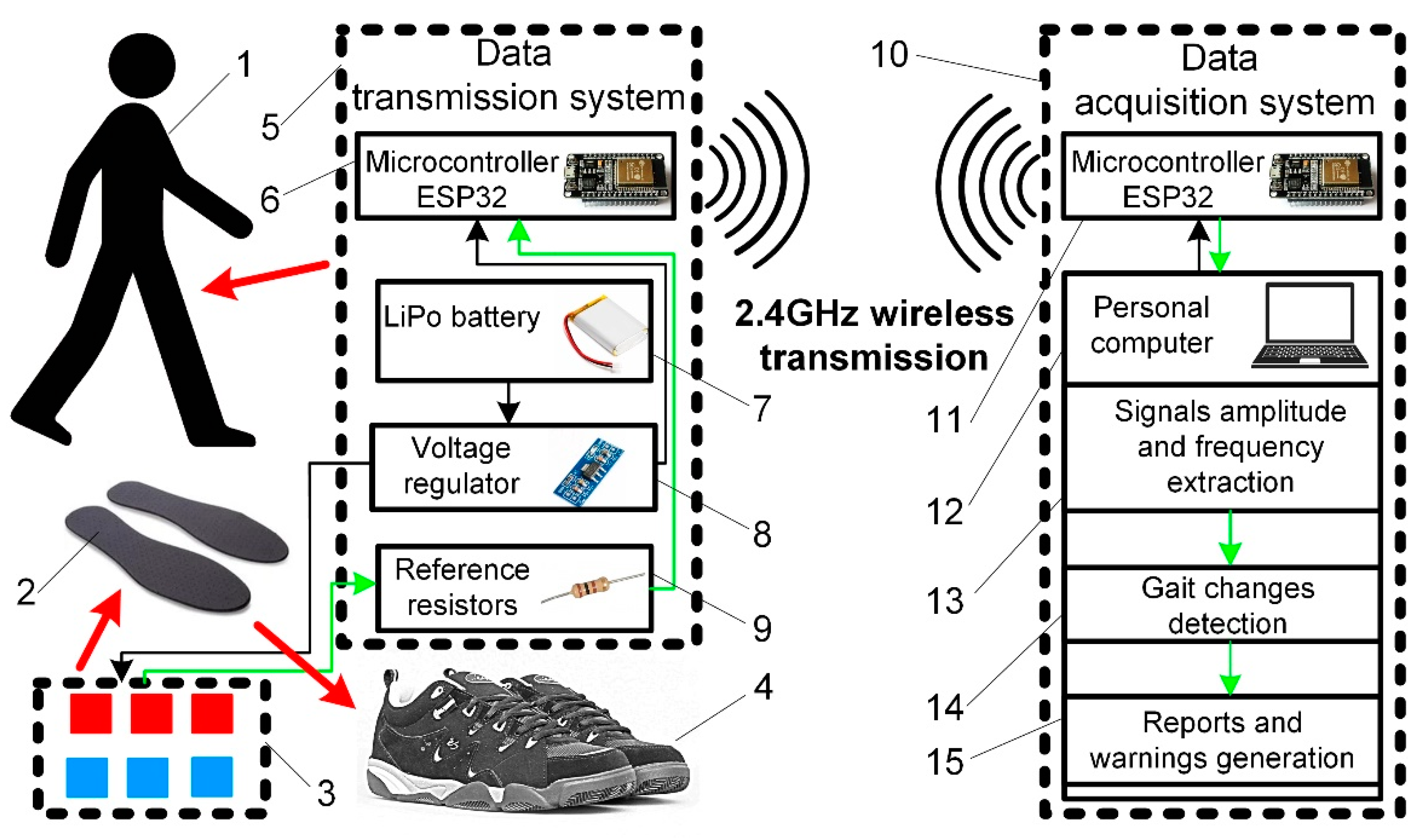
3.1. Experimental Setup
3.2. Methodology
3.3. Calculations
4. Results
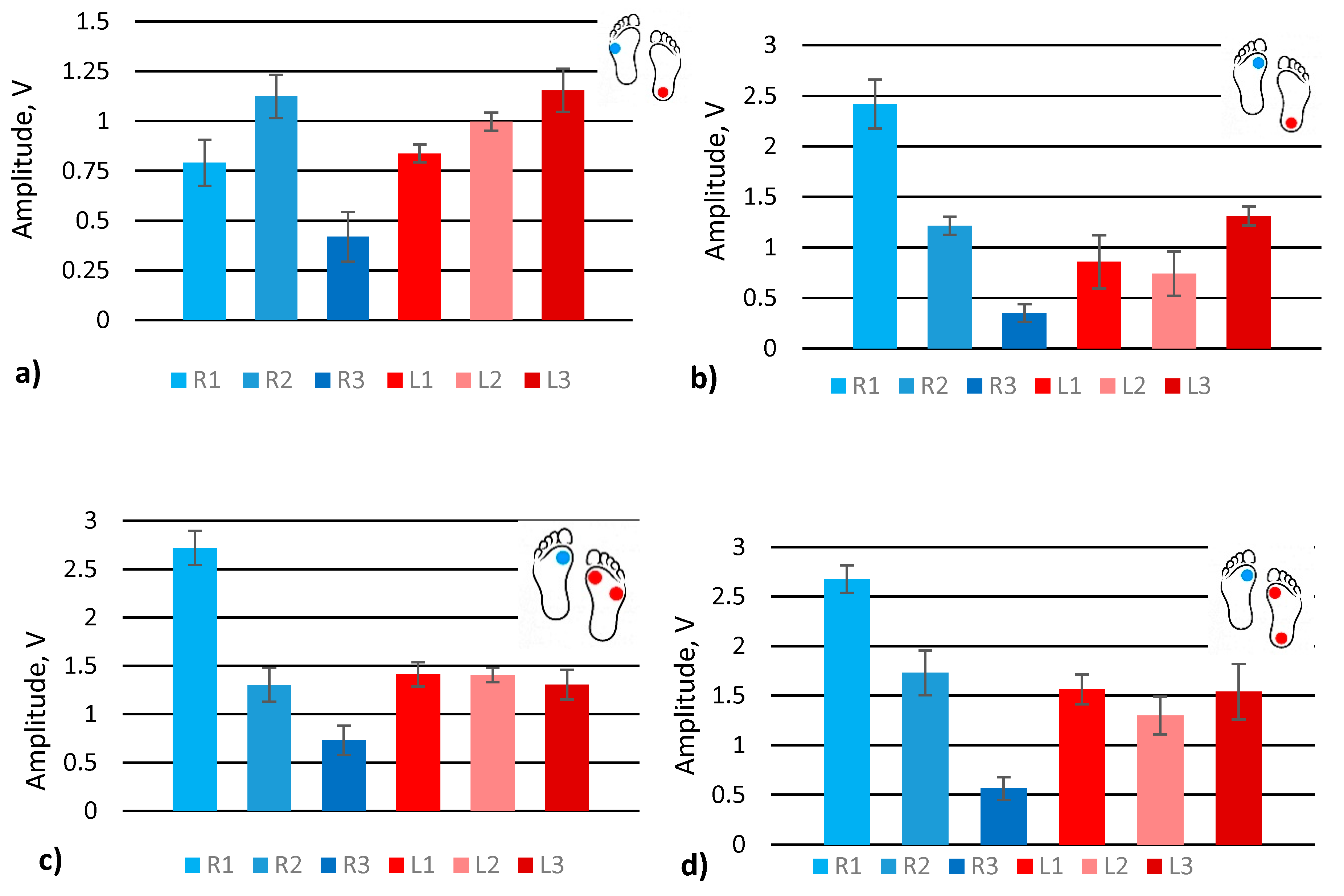
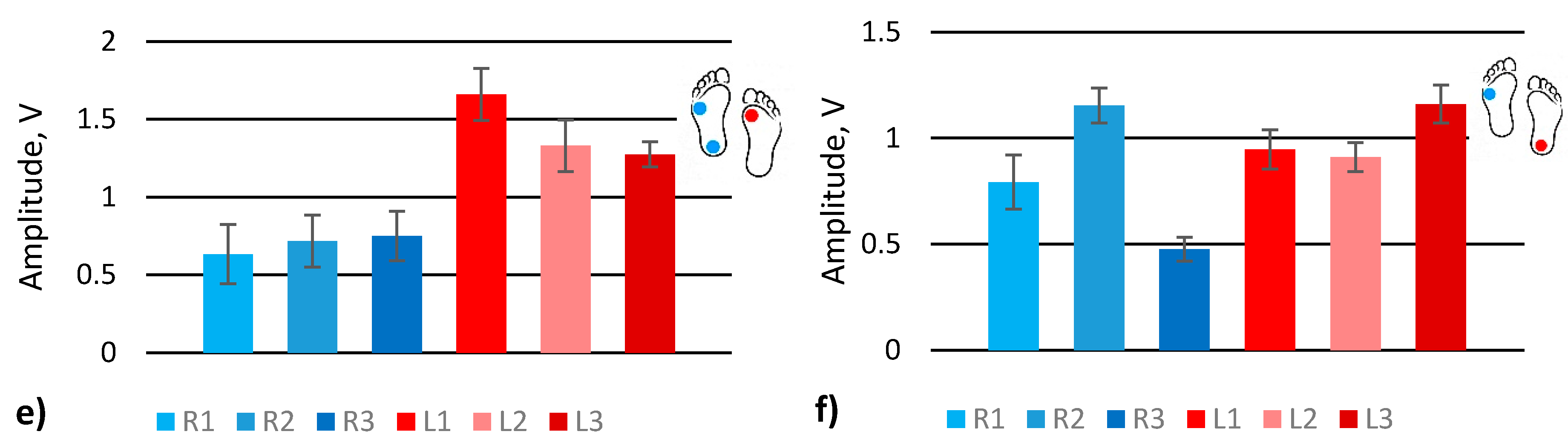
4.1. Analysis of Feet Load Distribution
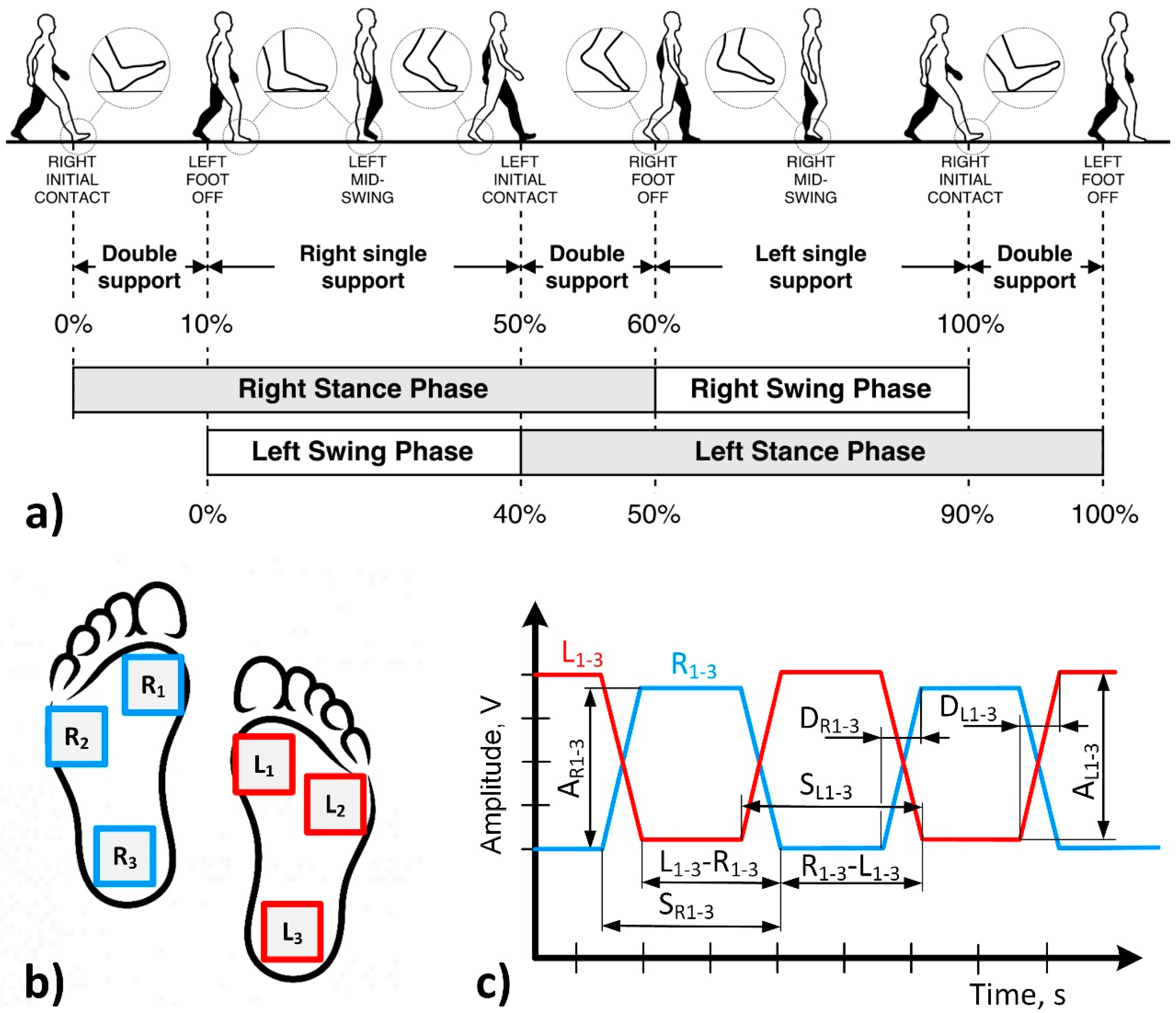
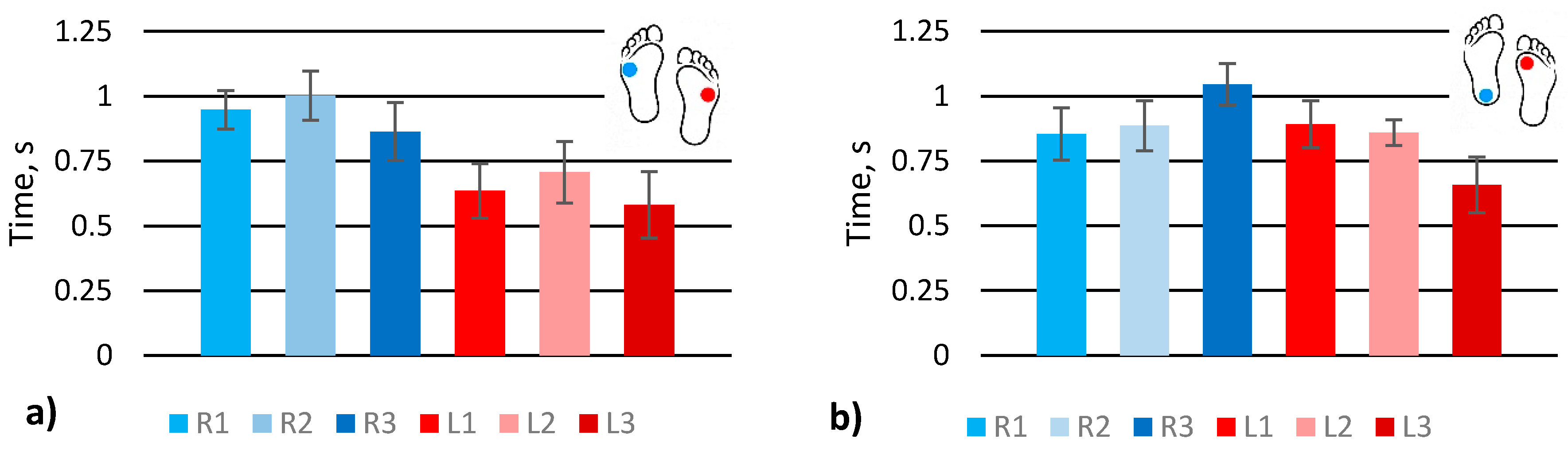
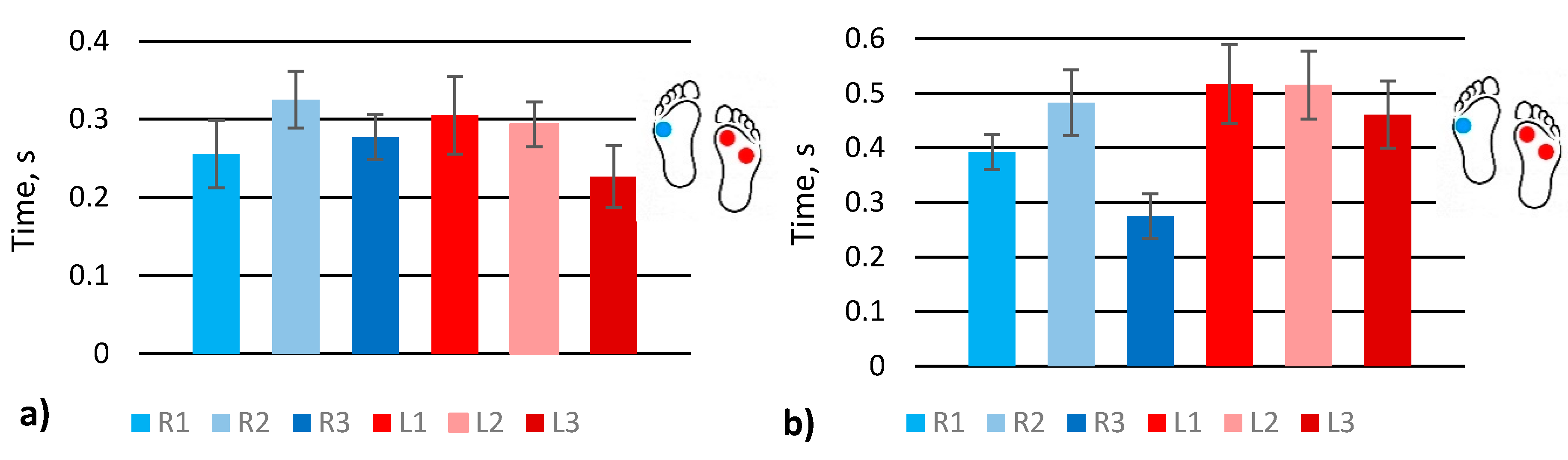
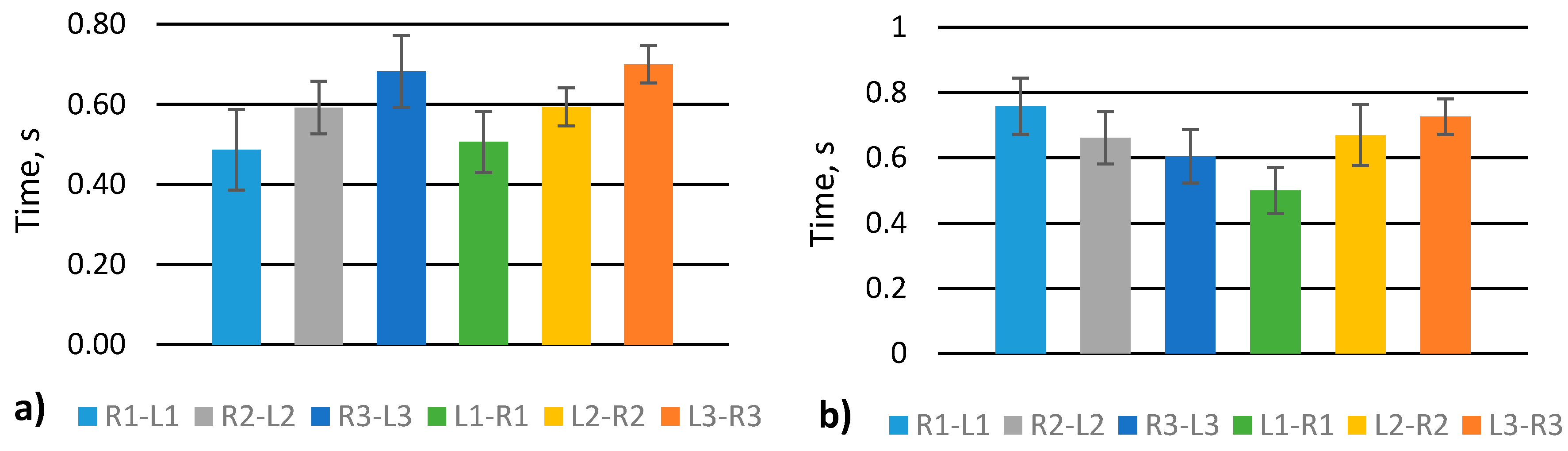
4.2. Analysis of Gait Phases Duration
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- World Health Organization. WHO Global Report on Falls Prevention in Older Age; World Health Organization: Geneva, Switzerland, 2007; Available online: https://extranet.who.int/agefriendlyworld/wp-content/uploads/2014/06/WHo-Global-report-on-falls-prevention-in-older-age.pdf (accessed on 2 August 2021).
- Mignardot, J.B.; Deschamps, T.; Barrey, E.; Auvinet, B.; Berrut, G.; Cornu, C.; Constans, T.; De Decker, L. Gait disturbances as specific predictive markers of the first fall onset in elderly people: A two-year prospective observational study. Front. Aging Neurosci. 2014, 6, 1–13. [Google Scholar] [CrossRef] [Green Version]
- Morfis, P.; Gkaraveli, M. Effects of aging on biomechanical gait parameters in the healthy elderly and the risk of falling. Anthropol. Sci. 2007, 115, 67–72. [Google Scholar] [CrossRef]
- Pirker, W.; Katzenschlager, R. Gait disorders in adults and the elderly: A clinical guide. Wien. Klin. Wochenschr. 2017, 129, 81–95. [Google Scholar] [CrossRef] [Green Version]
- Osoba, M.Y.; Rao, A.K.; Agrawal, S.K.; Lalwani, A.K. Balance and gait in the elderly: A contemporary review. Laryngoscope Investig. Otolaryngol. 2019, 4, 143–153. [Google Scholar] [CrossRef] [Green Version]
- Kannus, P.; Parkkari, J.; Koskinen, S.; Niemi, S.; Palvanen, M.; Järvinen, M.; Vuori, I. Fall-induced injuries and deaths among older adults. J. Am. Med. Assoc. 1999, 281, 1895–1899. [Google Scholar] [CrossRef] [Green Version]
- Kannus, P.; Sievänen, H.; Palvanen, M.; Järvinen, T.; Parkkari, J. Prevention of falls and consequent injuries in elderly people. Lancet 2005, 366, 1885–1893. [Google Scholar] [CrossRef]
- Ko, S.U.; Hausdorff, J.M.; Ferrucci, L. Age-associated differences in the gait pattern changes of older adults during fast-speed and fatigue conditions: Results from the Baltimore longitudinal study of ageing. Age Ageing 2010, 39, 688–694. [Google Scholar] [CrossRef] [Green Version]
- Pfeufer, D.; Becker, C.A.; Faust, L.; Keppler, A.M.; Stagg, M.; Kammerlander, C.; Böcker, W.; Neuerburg, C. Load-Bearing Detection with Insole-Force Sensors Provides New Treatment Insights in Fragility Fractures of the Pelvis. J. Clin. Med. 2020, 9, 2551. [Google Scholar] [CrossRef]
- Kubota, M.; Uchida, K.; Kokubo, Y.; Shimada, S.; Matsuo, H.; Yayama, T.; Miyazaki, T.; Takeura, N.; Yoshida, A.; Baba, H. Changes in gait pattern and hip muscle strength after open reduction and internal fixation of acetabular fracture. Arch. Phys. Med. Rehabil. 2012, 93, 2015–2021. [Google Scholar] [CrossRef] [PubMed]
- Kim, K.; Lee, K.R.; Kim, W.H.; Park, K.B.; Kim, T.H.; Kim, J.S.; Pak, J.J. Polymer-based flexible tactile sensor up to 32 × 32 arrays integrated with interconnection terminals. Sens. Actuators A Phys. 2009, 156, 284–291. [Google Scholar] [CrossRef]
- Hwang, E.-S.; Seo, J.-H.; Kim, Y.-J. A Polymer-Based Flexible Tactile Sensor for Normal and Shear Load Detection. In Proceedings of the 19th IEEE International Conference on Micro Electro Mechanical Systems, Istanbul, Turkey, 22–26 January 2006; pp. 714–717. [Google Scholar] [CrossRef]
- Ules, T.; Hausberger, A.; Grießer, M.; Schlögl, S.; Gruber, D.P. Introduction of a new in-situ measurement system for the study of touch-feel relevant surface properties. Polymers 2020, 12, 1380. [Google Scholar] [CrossRef] [PubMed]
- Zhang, Y.; Li, L. Modelling and design of MEMS piezoresistive out-of-plane shear and normal stress sensors. Sensors 2018, 18, 3737. [Google Scholar] [CrossRef] [Green Version]
- Palmer, M.C.; O’Rourke, T.D.; Olson, N.A.; Abdoun, T.; Ha, D.; O’Rourke, M.J. Tactile Pressure Sensors for Soil-Structure Interaction Assessment. J. Geotech. Geoenviron. Eng. 2009, 135, 1638–1645. [Google Scholar] [CrossRef] [Green Version]
- Wakabayashi, S.; Arie, T.; Akita, S.; Takei, K. Very Thin, Macroscale, Flexible, Tactile Pressure Sensor Sheet. ACS Omega 2020, 5, 17721–17725. [Google Scholar] [CrossRef]
- Li, J.; Chen, S.; Peng, Z.; Deng, Z.; Xing, S.; Wu, Y.; Liu, S.; Liu, L. A multidimensional hierarchical structure designed for lateral strain-isolated ultrasensitive pressure sensing. J. Mater. Chem. C 2020, 8, 922–929. [Google Scholar] [CrossRef]
- Stassi, S.; Cauda, V.; Canavese, G.; Pirri, C.F. Flexible tactile sensing based on piezoresistive composites: A review. Sensors 2014, 14, 5296–5332. [Google Scholar] [CrossRef] [Green Version]
- Yousef, H.; Boukallel, M.; Althoefer, K. Tactile sensing for dexterous in-hand manipulation in robotics—A review. Sens. Actuators A Phys. 2011, 167, 171–187. [Google Scholar] [CrossRef]
- Zhang, Y.; Ye, J.; Lin, Z.; Huang, S.; Wang, H.; Wu, H. A Piezoresistive Tactile Sensor for a Large Area Employing Neural Network. Sensors 2018, 19, 27. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wen, F.; Sun, Z.; He, T.; Shi, Q.; Zhu, M.; Zhang, Z.; Li, L.; Zhang, T.; Lee, C. Machine Learning Glove Using Self-Powered Conductive Superhydrophobic Triboelectric Textile for Gesture Recognition in VR/AR Applications. Adv. Sci. 2020, 7, 2000261. [Google Scholar] [CrossRef]
- Hopkins, M.; Vaidyanathan, R.; McGregor, A.H. Examination of the Performance Characteristics of Velostat as an In-Socket Pressure Sensor. IEEE Sens. J. 2020, 20, 6992–7000. [Google Scholar] [CrossRef]
- Barba, R.; De Madrid, Á.P.; Boticario, J.G. Development of an inexpensive sensor network for recognition of sitting posture. Int. Int. J. Distrib. Sens. Netw. 2015, 11, 969237. [Google Scholar] [CrossRef] [Green Version]
- Giovanelli, D.F.E.; Farella, E. Force Sensing Resistor and Evaluation of Technology for Wearable Body Pressure Sensing. J. Sens. 2016, 2016, 1–14. [Google Scholar] [CrossRef] [Green Version]
- Ramya, P.; Padmapriya, B.; Poornachandra, S. Foot pressure monitoring using single layer carbon loaded piezoresistive material. Microprocess. Microsyst. 2020, 79, 103263. [Google Scholar] [CrossRef]
- Ahmad, J.; Andersson, H.; Sidén, J. Screen-Printed Piezoresistive Sensors for Monitoring Pressure Distribution in Wheelchair. IEEE Sens. J. 2018, 19, 2055–2063. [Google Scholar] [CrossRef]
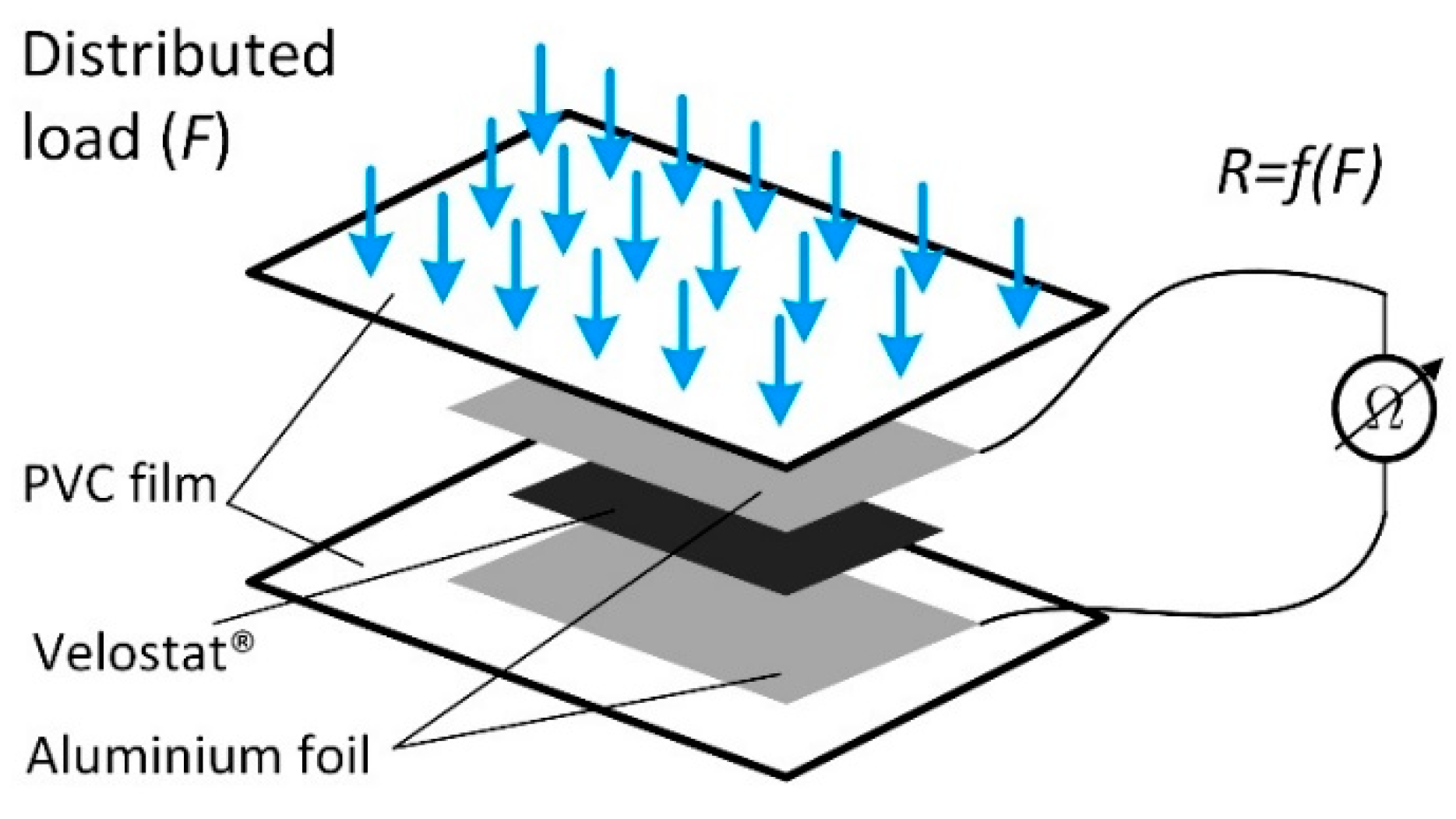
- Dzedzickis, A.; Sutinys, E.; Bucinskas, V.; Samukaite-Bubniene, U.; Jakstys, B.; Ramanavicius, A.; Morkvenaite-Vilkonciene, I. Polyethylene-carbon composite (Velostat®) based tactile sensor. Polym. 2020, 12, 2905. [Google Scholar] [CrossRef] [PubMed]
- Tunca, C.; Pehlivan, N.; Ak, N.; Arnrich, B.; Salur, G.; Ersoy, C. Inertial sensor-based robust gait analysis in non-hospital settings for neurological disorders. Sensors 2017, 17, 825. [Google Scholar] [CrossRef] [Green Version]
- Zhou, L.; Fischer, E.; Tunca, C.; Brahms, C.M.; Ersoy, C.; Granacher, U.; Arnrich, B. How we found our imu: Guidelines to IMU selection and a comparison of seven IMUs for pervasive healthcare applications. Sensors 2020, 20, 4090. [Google Scholar] [CrossRef]
- Cowan, G. Statistical Data Analysis; Oxford University Press: Oxford, UK, 1998. [Google Scholar]
- Qiu, S.; Liu, L.; Zhao, H.; Wang, Z.; Jiang, Y. MEMS inertial sensors based gait analysis for rehabilitation assessment via multi-sensor fusion. Micromachines 2018, 9, 442. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Choi, S.T.; Moon, J.; Park, H.C. User identification from gait analysis using multi-modal sensors in smart insole. Sensors 2019, 19, 3785. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Anwary, A.R.; Yu, H.; Vassallo, M. Optimal Foot Location for Placing Wearable IMU Sensors and Automatic Feature Extraction for Gait Analysis. IEEE Sens. J. 2018, 18, 2555–2567. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sensor Type and Placing | Method | Gait Parameters | Ref. |
|---|---|---|---|
| Accelerometers in belt on the waist. | Time measure, vectorial calculations, FFT, autocorrelation, wavelet analysis, and statistical regressions. | Global kinetic behaviour of the gait. | [2] |
| Reflective markers on the body and cameras. Two sequentially staggered AMTI force platforms. | The 3D kinematics calculated by the Euler angle theorem and inverse dynamics. Statistical analyses. | Gait speed, stride length and width, cadence, stance, hip extension, hip flexion, knee extension, knee flexion, ankle dorsiflexion, ankle plantarflexion. | [8] |
| Reflective markers, cameras, and force plates placed in the middle of a walkway. Handheld dynamometer. | The 3D kinematics calculated by commercial software. Statistical analyses. | Spatiotemporal, kinematic, and kinetic variables of gait, strength of hip flexor, adductor, and abductor’s muscles. | [10] |
| IMUs placed on the upper surface of shoe or feet | The MLA and Kalman filtering. IC/FO detection algorithm. | A rich set of standard spatio-temporal gait metrics. | [28] |
| Seven different IMU sensors, OptoGait measurement system. | The MLA and Kalman filtering, double integration of acceleration measurements. | Stride length, stance and swing times, and walking speed. | [29] |
| Custom assembled IMUs on feet, shank, and thigh. | The MLA with data fusion. | Stride length, stride speed, stride frequency, walking cycle, stance time, swing time, clearance, and knee ROM. | [31] |
| IMU sensor on bare foot. | The MLA with sensor fusion and Kalman filter. Double integration of acceleration data. | Stride distance, speed, length, and period. The ratio and phases between stance and swing. | [33] |
| Insole equipped with pressure sensors and a triaxial accelerometer. | Gait data recorded as time series signals. | Heel strike, foot flat, mid-stance, heel off, toe-off, mid-swing, and late swing. | [32] |
| Insole-Force Sensors. | Shapiro–Wilk-Test, Mann–Whitney-U-Test, Statistical analyses. | Loading of the lower limbs. | [9] |
| Six original flexible piezoresistive pressure sensors attached to the lower surface of the universal shoe lining. | Signal analysis in the time domain. Statistical analysis. | Feet load distribution, stance phase duration, stepping abruptness, and stepping unevenness. | This article |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bucinskas, V.; Dzedzickis, A.; Rozene, J.; Subaciute-Zemaitiene, J.; Satkauskas, I.; Uvarovas, V.; Bobina, R.; Morkvenaite-Vilkonciene, I. Wearable Feet Pressure Sensor for Human Gait and Falling Diagnosis. Sensors 2021, 21, 5240. https://doi.org/10.3390/s21155240
Bucinskas V, Dzedzickis A, Rozene J, Subaciute-Zemaitiene J, Satkauskas I, Uvarovas V, Bobina R, Morkvenaite-Vilkonciene I. Wearable Feet Pressure Sensor for Human Gait and Falling Diagnosis. Sensors. 2021; 21(15):5240. https://doi.org/10.3390/s21155240
Chicago/Turabian StyleBucinskas, Vytautas, Andrius Dzedzickis, Juste Rozene, Jurga Subaciute-Zemaitiene, Igoris Satkauskas, Valentinas Uvarovas, Rokas Bobina, and Inga Morkvenaite-Vilkonciene. 2021. "Wearable Feet Pressure Sensor for Human Gait and Falling Diagnosis" Sensors 21, no. 15: 5240. https://doi.org/10.3390/s21155240
APA StyleBucinskas, V., Dzedzickis, A., Rozene, J., Subaciute-Zemaitiene, J., Satkauskas, I., Uvarovas, V., Bobina, R., & Morkvenaite-Vilkonciene, I. (2021). Wearable Feet Pressure Sensor for Human Gait and Falling Diagnosis. Sensors, 21(15), 5240. https://doi.org/10.3390/s21155240