
A Method for Real-Time Fault Detection of Liquid Rocket Engine Based on Adaptive Genetic Algorithm Optimizing Back Propagation Neural Network


Abstract
:1. Introduction
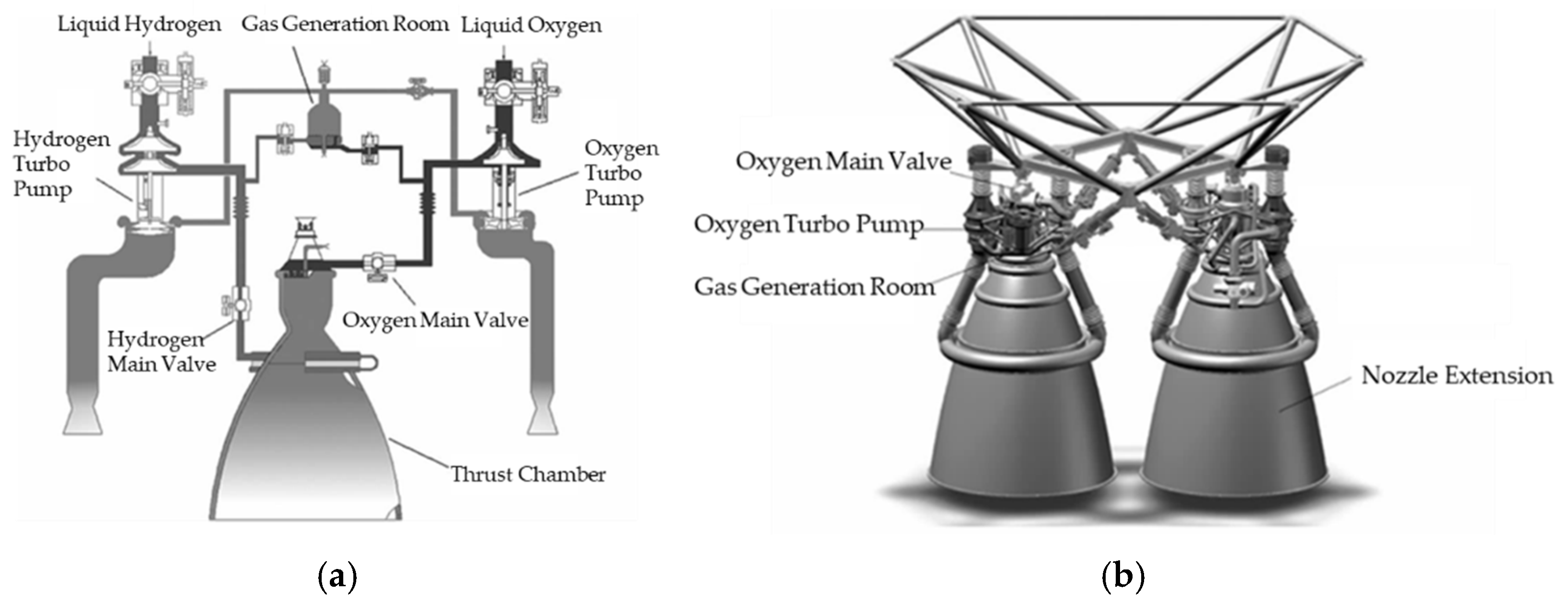
2. Liquid Hydrogen and Liquid Oxygen Rocket Engine
3. Model Building
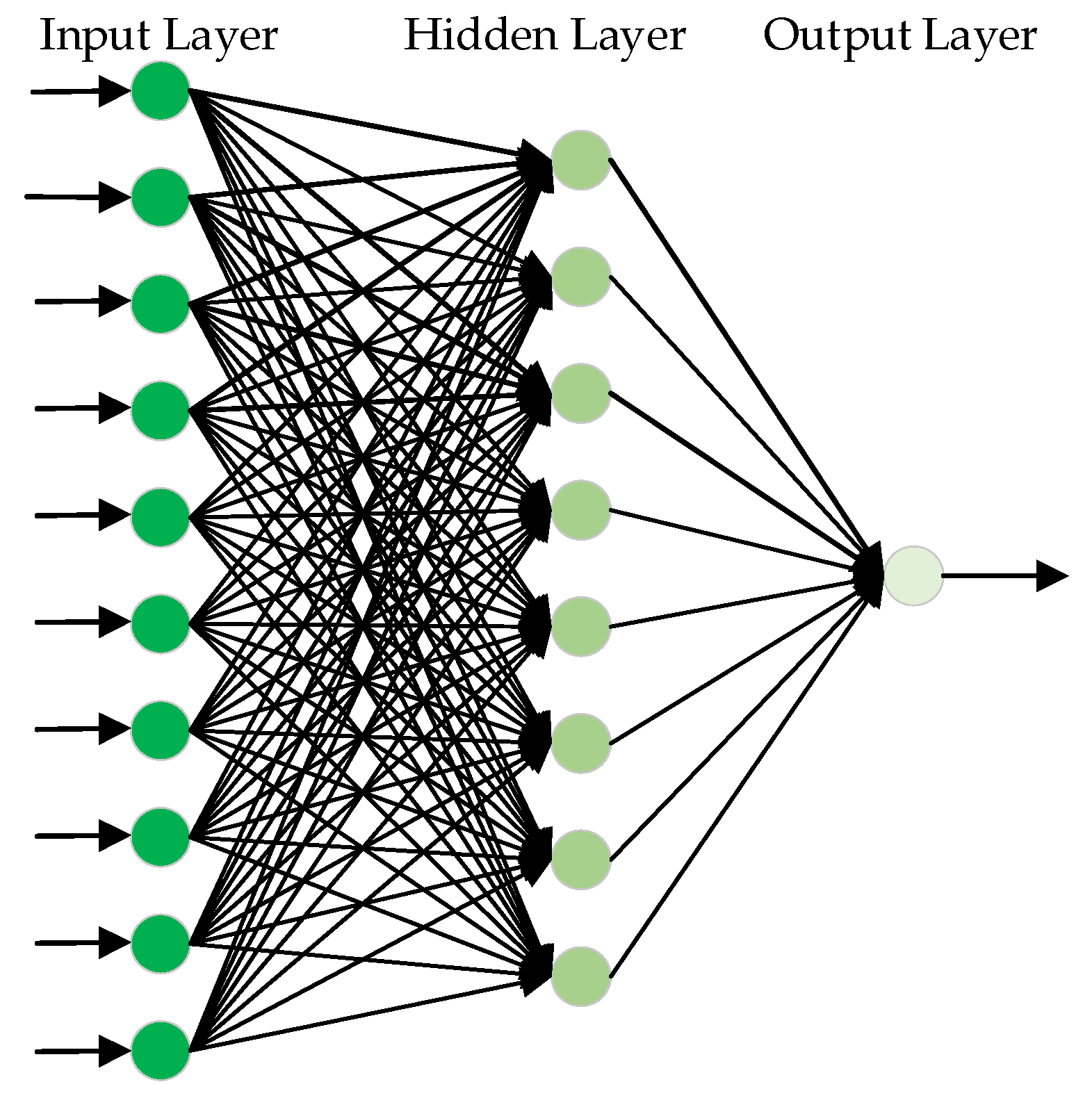
3.1. BP Neural Network
3.2. Adaptive Genetic Algorithm
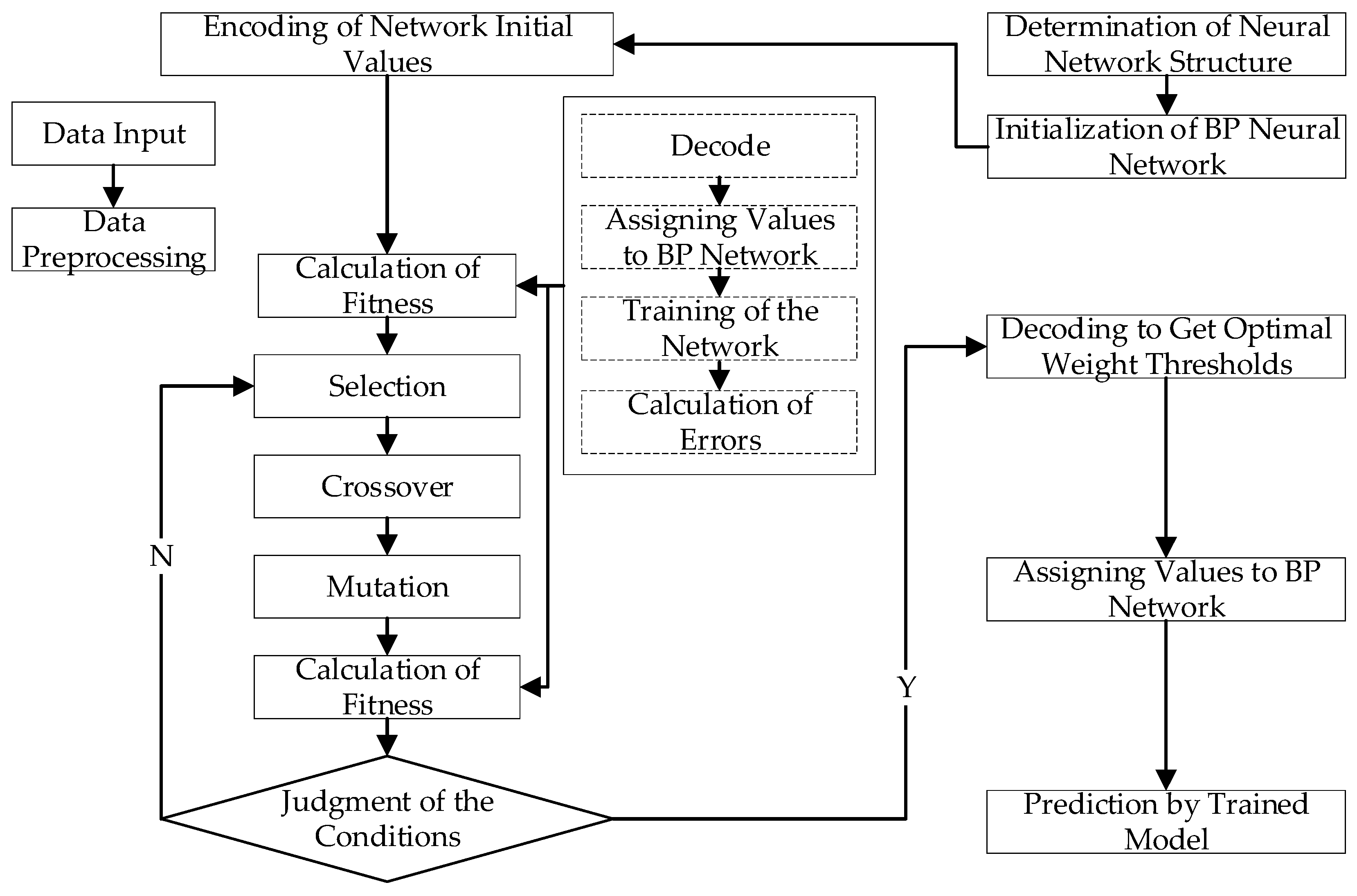
3.3. Using AGA to Optimize BP Neural Network
3.3.1. Determining the Structure of the BP Neural Network
3.3.2. Optimizing the BP Neural Network Using AGA
3.3.3. Using the Optimized BP Neural Network to Forecast
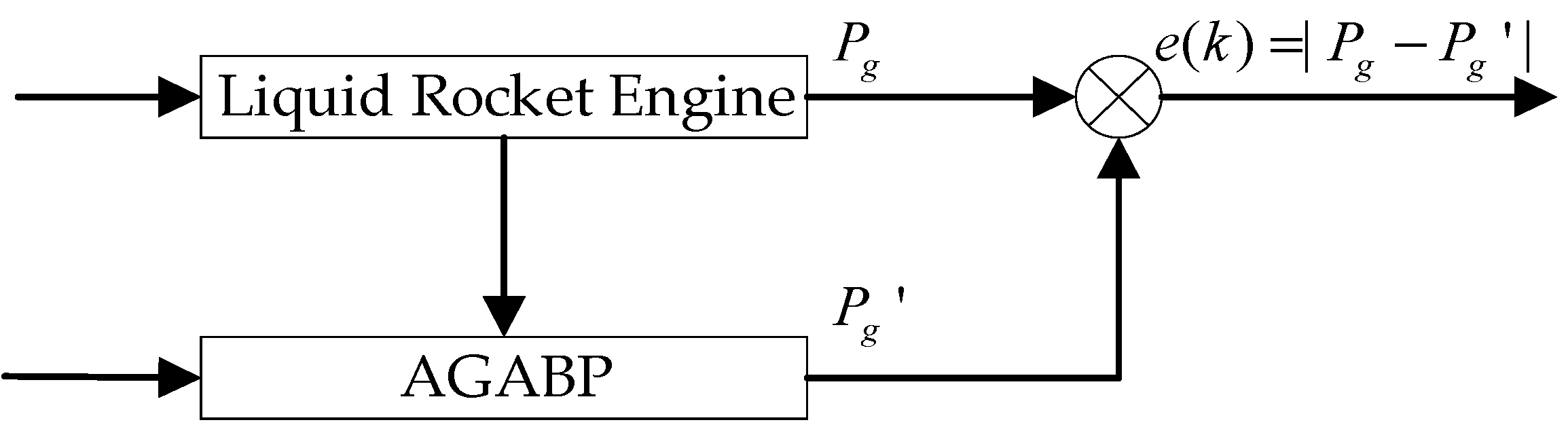
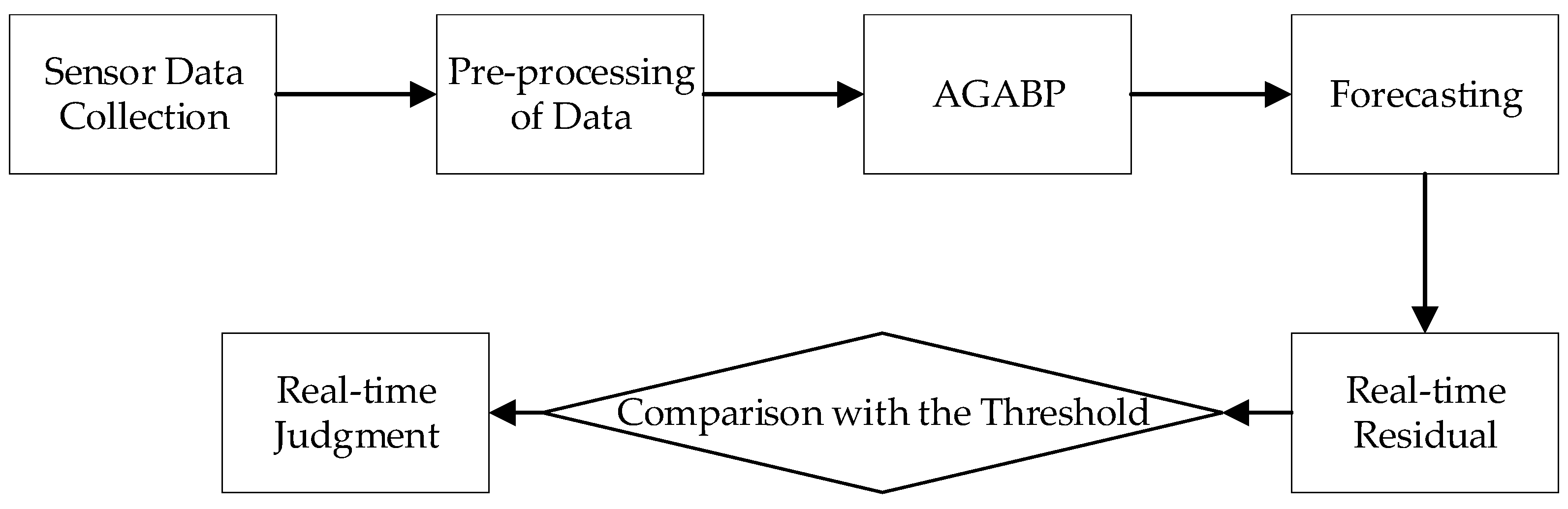
4. Real-Time Fault Detection via AGABP

4.1. Data Preprocessing
4.1.1. Select Data
4.1.2. Normalization of Data
4.2. Threshold Judgment Mechanism
5. Experiment and Simulation Analysis
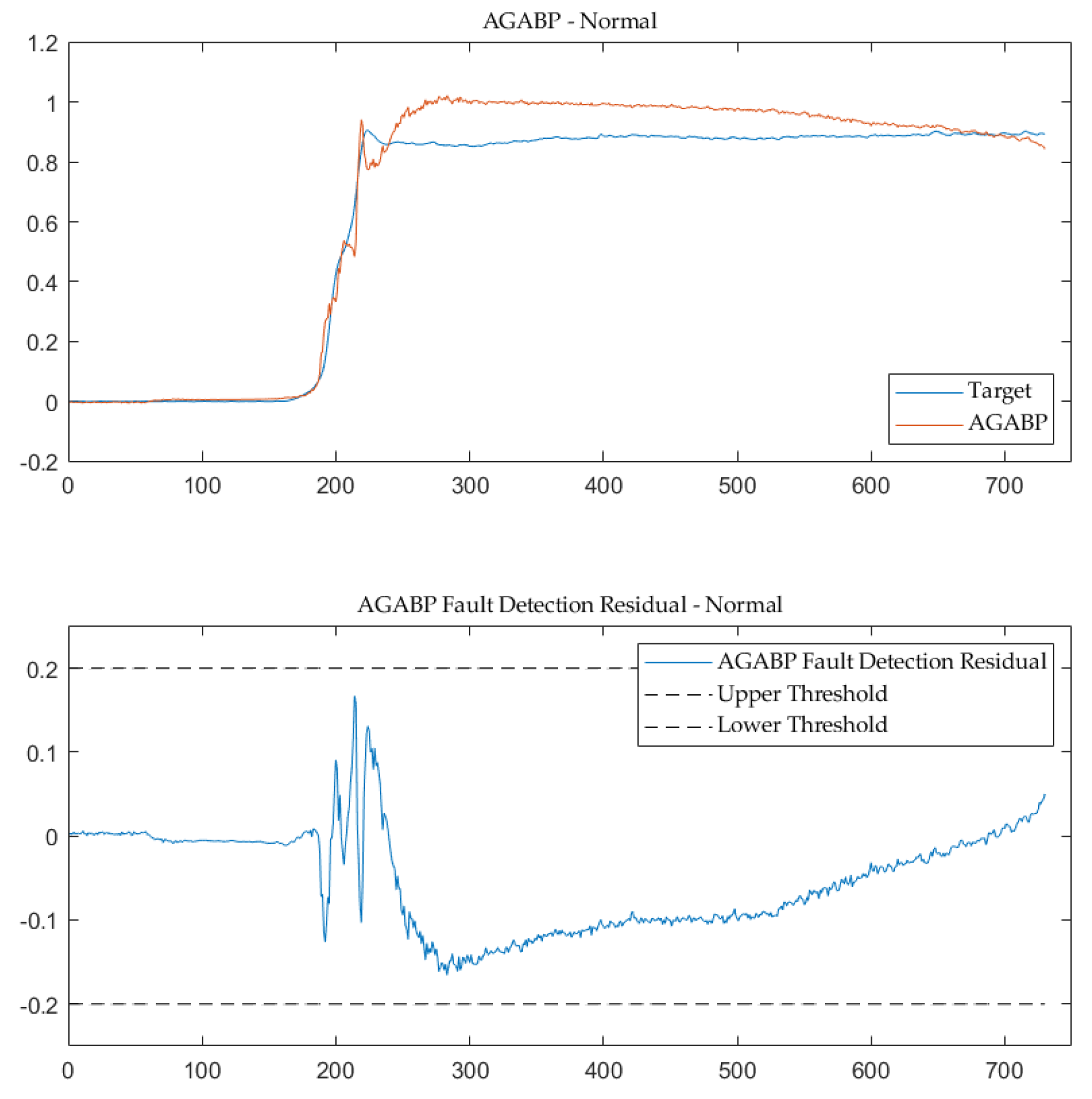
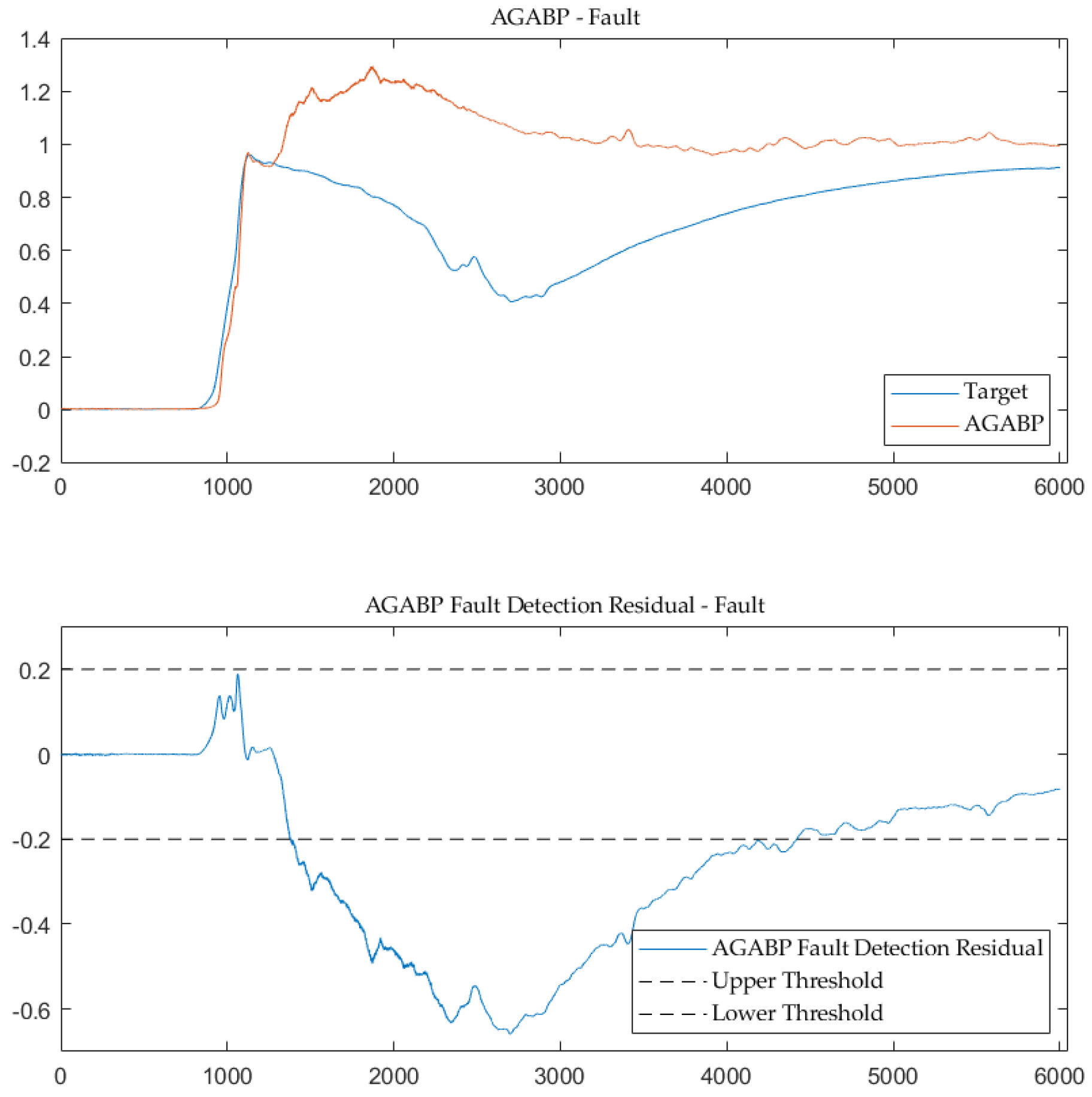
5.1. Results about AGABP Model
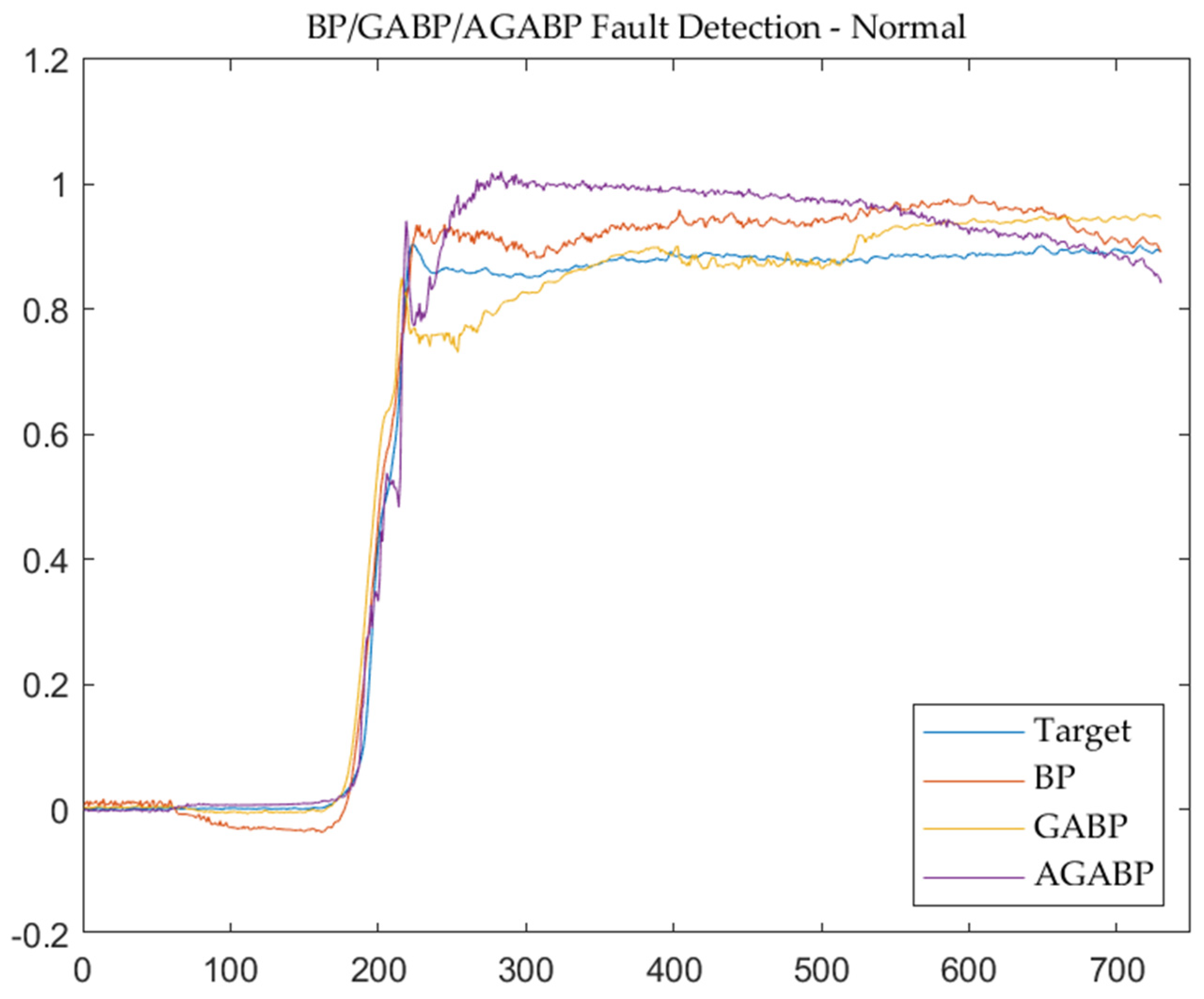
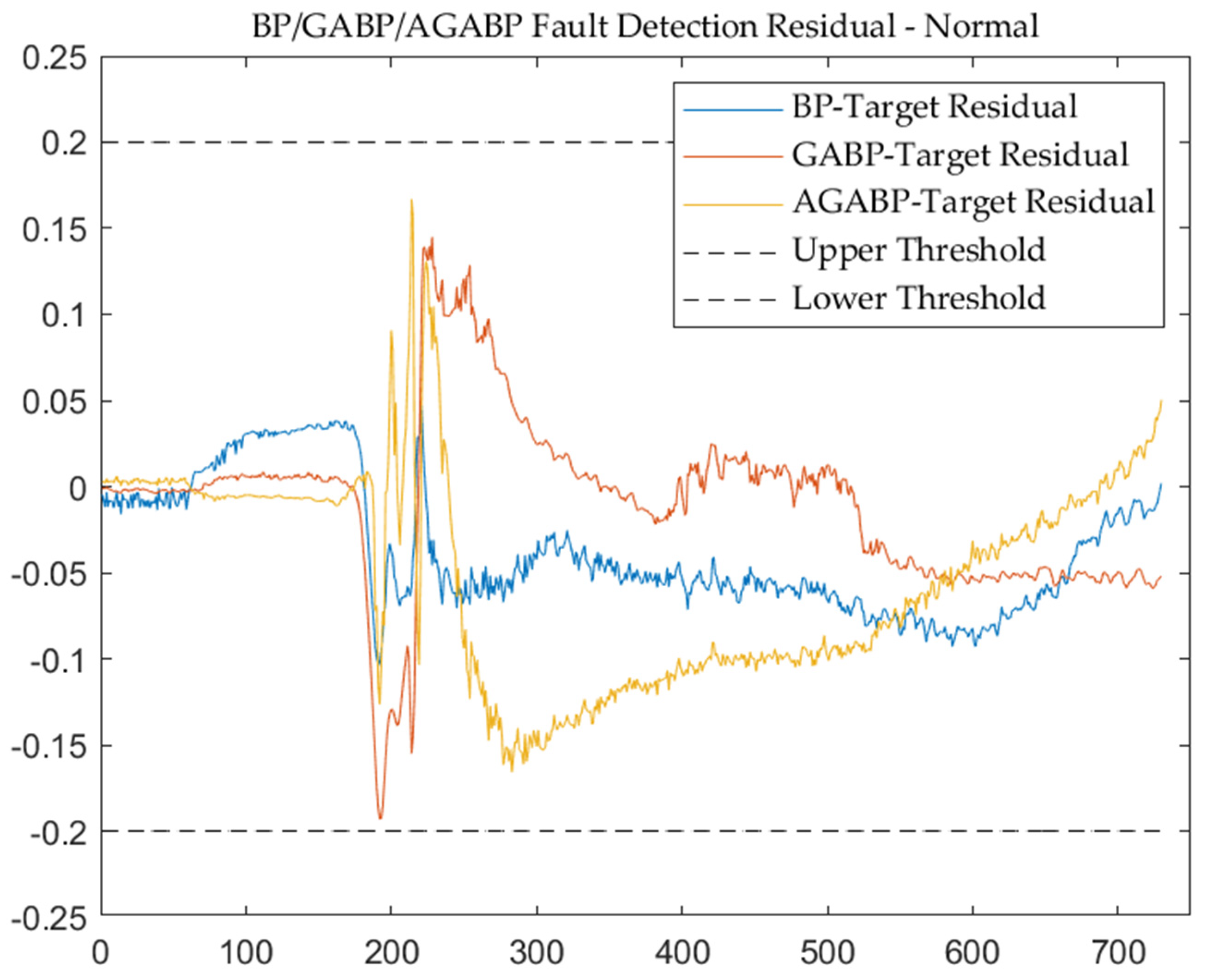
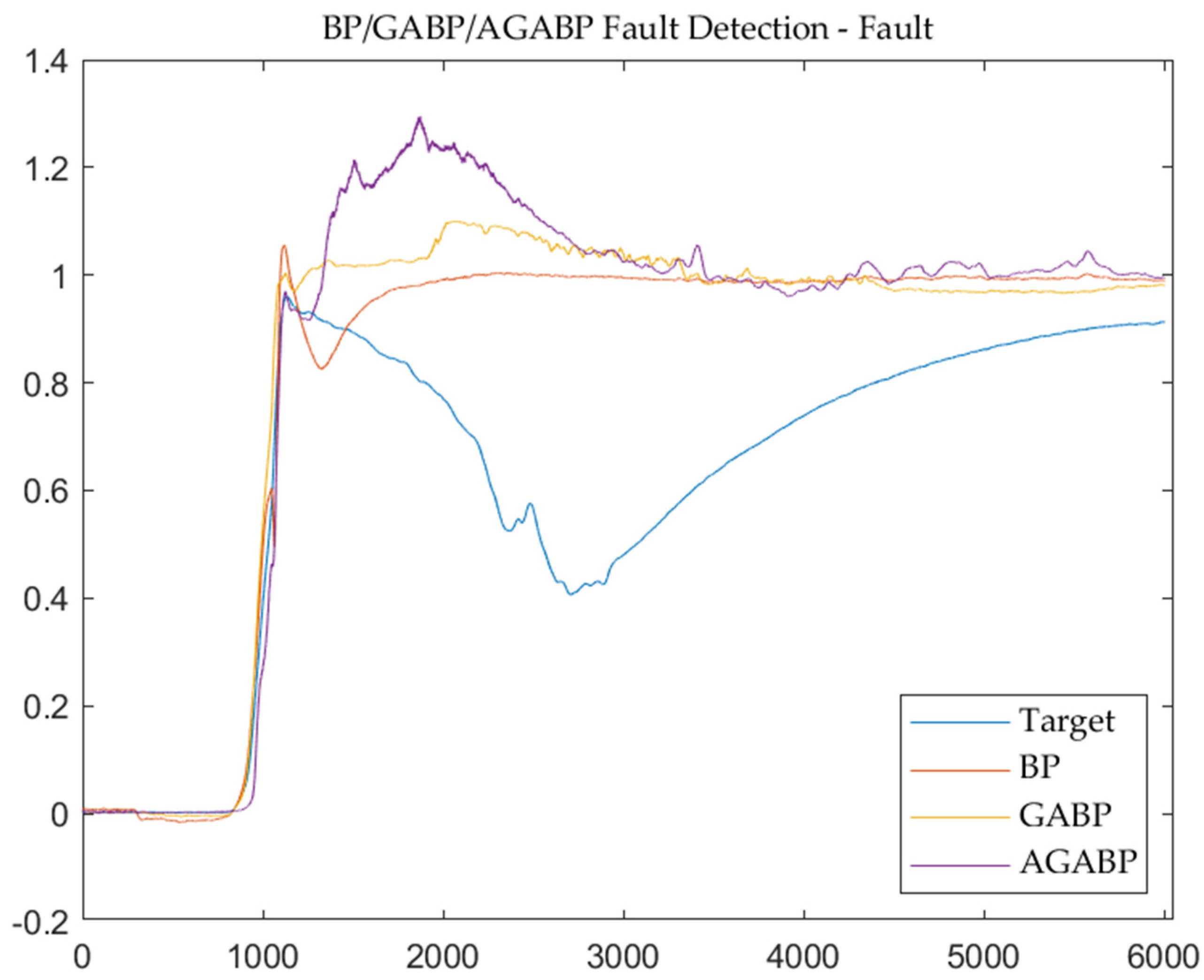
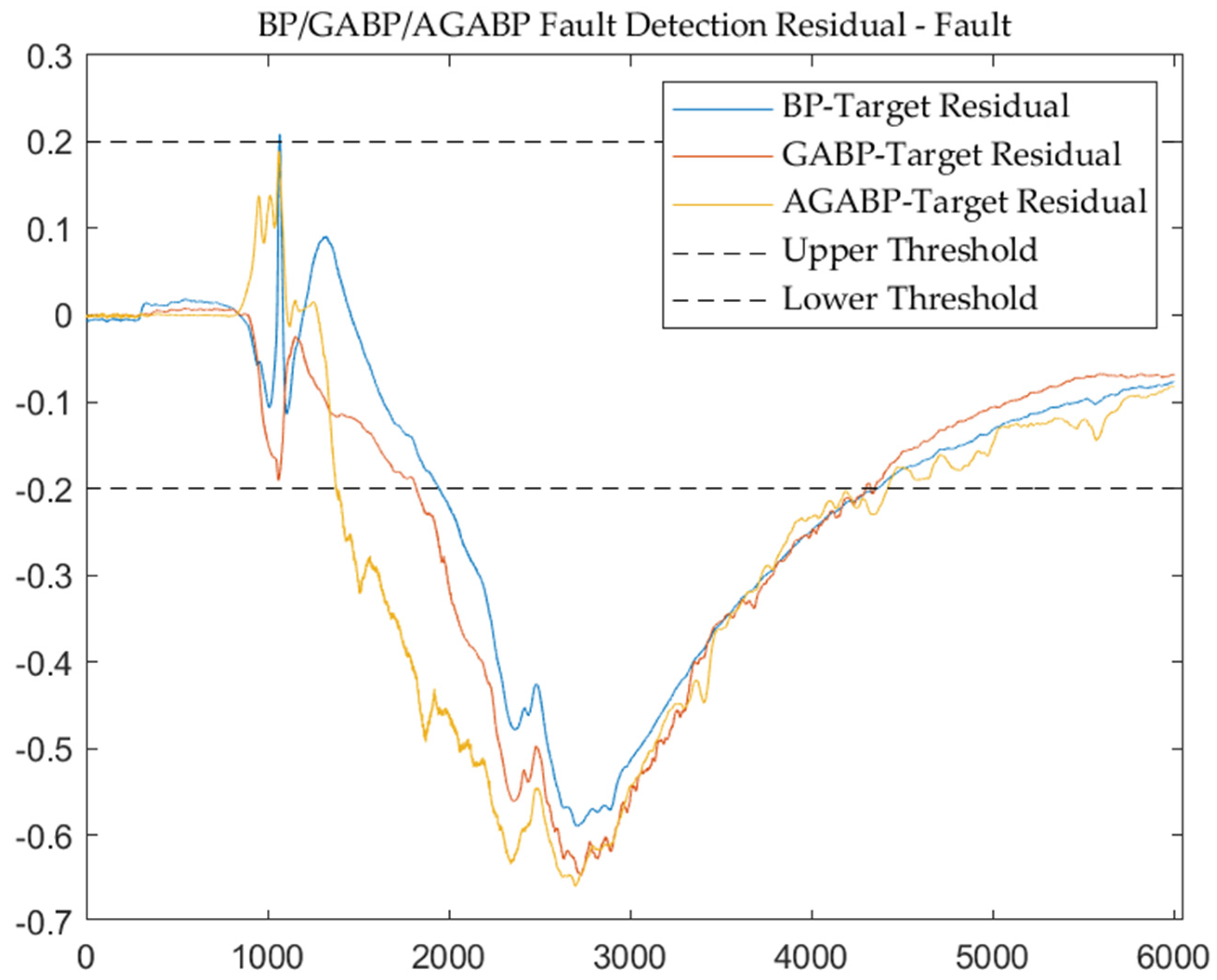
5.2. Simulation Result and Analysis
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| AGA | Adaptive genetic algorithm |
| AGABP | Adaptive genetic algorithm optimized BP neural network |
| ARMA | Autoregressive moving average |
| BP | Back propagation |
| GA | Genetic algorithm |
| GABP | Standard genetic algorithm optimized BP neural network |
| LH2/LOX | Liquid hydrogen and liquid oxygen |
| LRE | Liquid rocket engine |
| MFT | Model Forecast Time |
| MSE | Mean Square Error |
References
- Wu, J.J.; Zhu, X.B.; Cheng, Y.Q.; Cui, M.Y. Research Progress of Intelligent Health Monitoring Technology for Liquid Rocket Engines. J. Propuls. Technol. 2021, 1–13. [Google Scholar]
- Wu, J.J.; Cheng, Y.Q.; Cui, X. Research Status of the Health Monitoring Technology for Liquid Rocket Engines. Aerosp. Shanghai Chin. Engl. 2020, 37, 1–10. [Google Scholar]
- Li, Y.J. Study on Key Techniques of Fault Detection and Diagnosis for New Generation Large-Scale Liquid-Propellant Rocket Engines. Ph.D. Thesis, School of National University of Defense Technology, Changsha, China, 2014. [Google Scholar]
- Xue, W.; Zhang, Q.; Wu, X.P. Based on the ARMA Model for the Liquid Rocket Propulsion Fault Detection. Comput. Meas. Control 2019, 27, 4–7. [Google Scholar]
- Liu, H.G.; Wei, P.F.; Xie, T.F.; Huang, Q.; Wu, J.J. Research of Real-time Fault Detection Method for Liquid Propellant Rocket Engines in Ground Test. J. Astronaut. 2007, 28, 1660–1663. [Google Scholar]
- Flora, J.J.; Auxillia, D.J. Sensor Failure Management in Liquid Rocket Engine using Artificial Neural Network. J. Sci. Ind. Res. India 2020, 79, 1024–1027. [Google Scholar]
- Zhang, W.; Zhang, Y.X.; Huang, X.X. Multi-fault Diagnosis for Turbo-pump Based on Neural Network. J. Propuls. Technol. 2003, 24, 17–20. [Google Scholar]
- Liu, Y.J.; Huang, Q.; Cheng, Y.Q.; Wu, J.J. Fault Diagnosis Method for Liquid-propellant Rocket Engines Based on the Dynamic Cloud-BP Neural Network. J. Aerosp. Power 2012, 27, 2842–2849. [Google Scholar]
- Xu, L.; Zhao, S.; Li, N.; Gao, Q.; Wang, T.; Xue, W. Application of QGA-BP for Fault Detection of Liquid Rocket Engines. IEEE Trans. Aerosp. Electron. Syst. 2019, 55, 2464–2472. [Google Scholar] [CrossRef]
- Li, N.; Xue, W.; Guo, X.; Xu, L.; Wu, Y.; Yao, Y. Fault Detection in Liquid-propellant Rocket Engines Based on Improved PSO-BP Neural Network. J. Softw. 2019, 14, 380–387. [Google Scholar] [CrossRef]
- Principi, E.; Rossetti, D.; Squartini, S.; Piazza, F. Unsupervised Electric Motor Fault Detection by Using Deep Autoencoders. IEEE/CAA J. Autom. Sin. 2019, 6, 441–451. [Google Scholar] [CrossRef]
- Kazemi, H.; Yazdizadeh, A. Optimal State Estimation and Fault Diagnosis for a Class of Nonlinear Systems. IEEE/CAA J. Autom. Sin. 2020, 7, 517–526. [Google Scholar] [CrossRef]
- Zhang, P.Y.; Shu, S.; Zhou, M.C. Adaptive and Dynamic Adjustment of Fault Detection Cycles in Cloud Computing. IEEE Trans. Ind. Inform. 2021, 17, 20–30. [Google Scholar] [CrossRef]
- Ding, X.L.; Jiao, H.; Sui, Y. Current Status of Foreign Hydrogen-oxygen Engine Detection Technology. Aerodyn. Missile J. 2019, 5, 90–95. [Google Scholar]
- Tan, Y.H. Research on Large Thrust Liquid Rocket Engine. J. Astronaut. 2013, 34, 1303–1308. [Google Scholar]
- Zheng, D.Y.; Tao, R.F.; Zhang, X.; Xiang, M. Study on Key Technology for Large Thrust LOX/LH2 Rocket Engine. J. Rocket Propuls. 2014, 40, 22–27, 35. [Google Scholar]
- Huang, D.Q.; Wang, Z.; Du, D.H. Structural Dynamics of the Large Thrust Liquid Rocket Engines. SCIENTIA SINICA Phys. Mech. Astron. 2019, 49, 23–34. [Google Scholar] [CrossRef]
- Long, L.H. Discussion of the Technical Route for China Manned Lunar-landing. Front. Sci. 2008, 2, 29–38. [Google Scholar]
- Dong, L.S.; Fan, J.; Luo, Q.J. System Design of Tripropellant Liquid Rocket Engine Based on YF-75 Rocket Engine. Missiles Space Veh. 2005, 4, 1–6. [Google Scholar]
- Tian, L.; Zhang, W.; Yang, Z.W. Application of Elman Neural Network on Liquid Rocket Engine Fault Prediction. J. Proj. Rocket. Missiles Guid. 2009, 29, 191–194. [Google Scholar]
- Xie, T.F.; Liu, H.G.; Huang, Q.; Wu, J.J. Selection of Real-time Fault Detection Parameters for Liquid-propellant Rocket Engines in Ground Tests. Aerosp. Control 2008, 26, 77–81. [Google Scholar]
- Huang, Q.; Wu, J.J.; Liu, H.G.; Xie, T. Implementation of Real-time Fault Detection Algorithms Based on Neural Network for Liquid Propellant Rocket Engines. J. Natl. Univ. Def. Technol. 2007, 29, 10–13. [Google Scholar]
- Zapata, H.; Perozo, N.; Angulo, W.; Contreras, J. A Hybrid Swarm Algorithm for Collective Construction of 3D Structures. Int. J. Artif. Intell. 2020, 18, 1–18. [Google Scholar]
- Kaur, G.; Gill, S.S.; Rattan, M. Whale Optimization Algorithm for Performance Improvement of Silicon-On-Insulator FinFET. Int. J. Artif. Intell. 2020, 18, 63–81. [Google Scholar]
- Precup, R.E.; David, R.C.; Roman, R.C.; Petriu, E.M.; Szedlak-Stinean, A.I. Slime Mould Algorithm-Based Tuning of Cost-Effective Fuzzy Controllers for Servo Systems. Int. J. Comput. Intell. Syst. 2021, 14, 1042–1052. [Google Scholar] [CrossRef]
- Feng, X.B.; Ding, R. Improved Genetic Algorithm and Its Application; Metallurgical Industry Press: Beijing, China, 2016. [Google Scholar]
- Srinivas, M.; Patnaik, L.M. Adaptive Probabilities of Crossover in Genetic. IEEE Trans. Syst. Man Cybern. 1994, 24, 656–667. [Google Scholar] [CrossRef] [Green Version]
- Chen, C.Z.; Wan, N. Adaptive Selection of Crossover and Mutation Probability of Genetic Algorithm and Its Mechanism. Control Theory Appl. 2002, 19, 41–43. [Google Scholar]
- Gao, S.C.; Zhou, M.C.; Wang, Y.R.; Cheng, J.J.; Hanaki, Y.; Wang, J.H. Dendritic Neuron Model with Effective Learning Algorithms for Classification, Approximation, and Prediction. IEEE Trans. Neural Netw. Learn. Syst. 2019, 30, 601–614. [Google Scholar] [CrossRef] [PubMed]
- Zhao, S.L.; Liu, Y. An Fault Detection Method Based on Compensation of SVMR. In Proceedings of the International Conference on Software Intelligence Technologies and Applications and International Conference on Frontiers of Internet of Things, Hsinchu, China, 4–6 December 2014; pp. 351–354. [Google Scholar]
- What Is the Time Complexity of Training a Neural Network Using Back Propagation? Available online: https://qastack.cn/ai/5728/what-is-the-time-complexity-for-training-a-neural-network-using-back-propagation (accessed on 20 July 2021).











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model | Normal Data (730 Sets) | Fault Data (6001 Sets) | ||
|---|---|---|---|---|
| MSE | MFT (s) 1 | MSE | MFT (s) 2 | |
| BP | 0.0027 | 0.0231 | 0.0703 | 0.0665 |
| GABP | 0.0026 | 0.0067 | 0.0597 | 0.0073 |
| AGABP | 0.0062 | 0.0054 | 0.1053 | 0.0071 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yu, H.; Wang, T. A Method for Real-Time Fault Detection of Liquid Rocket Engine Based on Adaptive Genetic Algorithm Optimizing Back Propagation Neural Network. Sensors 2021, 21, 5026. https://doi.org/10.3390/s21155026
Yu H, Wang T. A Method for Real-Time Fault Detection of Liquid Rocket Engine Based on Adaptive Genetic Algorithm Optimizing Back Propagation Neural Network. Sensors. 2021; 21(15):5026. https://doi.org/10.3390/s21155026
Chicago/Turabian StyleYu, Huahuang, and Tao Wang. 2021. "A Method for Real-Time Fault Detection of Liquid Rocket Engine Based on Adaptive Genetic Algorithm Optimizing Back Propagation Neural Network" Sensors 21, no. 15: 5026. https://doi.org/10.3390/s21155026
APA StyleYu, H., & Wang, T. (2021). A Method for Real-Time Fault Detection of Liquid Rocket Engine Based on Adaptive Genetic Algorithm Optimizing Back Propagation Neural Network. Sensors, 21(15), 5026. https://doi.org/10.3390/s21155026