
Nonlinear Ultrasound Crack Detection with Multi-Frequency Excitation—A Comparison



Abstract
:1. Introduction
2. Multiple Nonlinearity Parameter
2.1. Analytical Approach
2.2. Group Parameters
- No frequency overlap: .
- No frequencies with theoretical zero values and negative values: .
- Sensor bandwidth.
2.3. Evaluation Parameter
3. Proof of the Use of the One-Dimensional Wave Equation
4. Experimental Investigation—Plate Samples
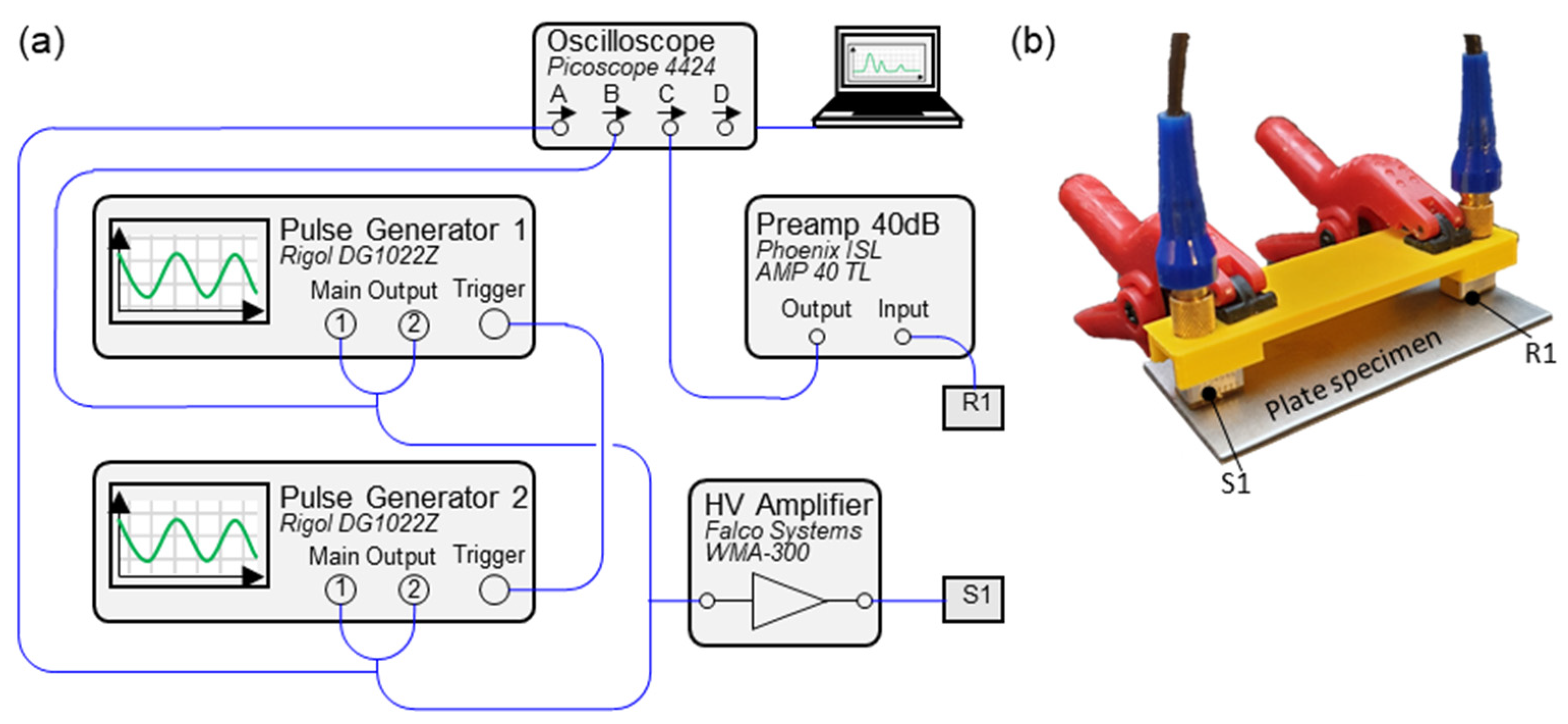
4.1. Experimental Setup
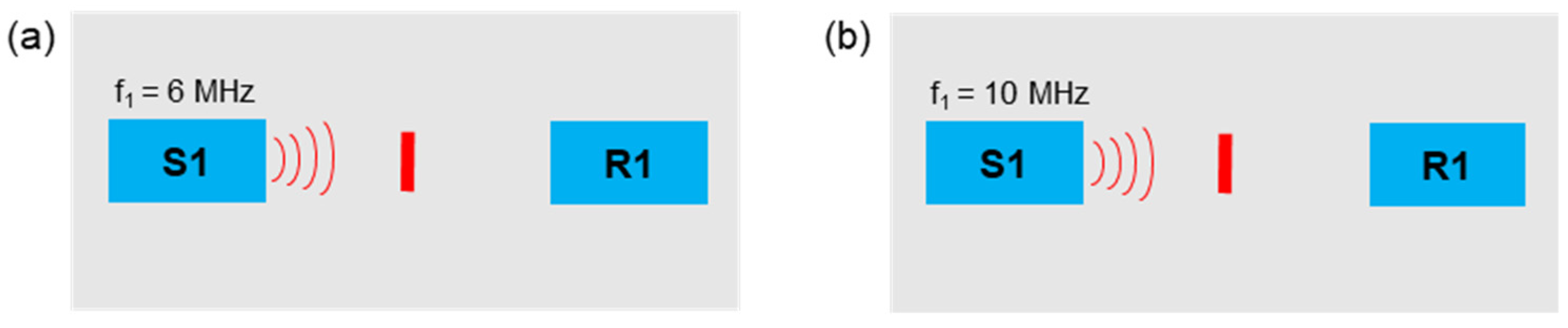
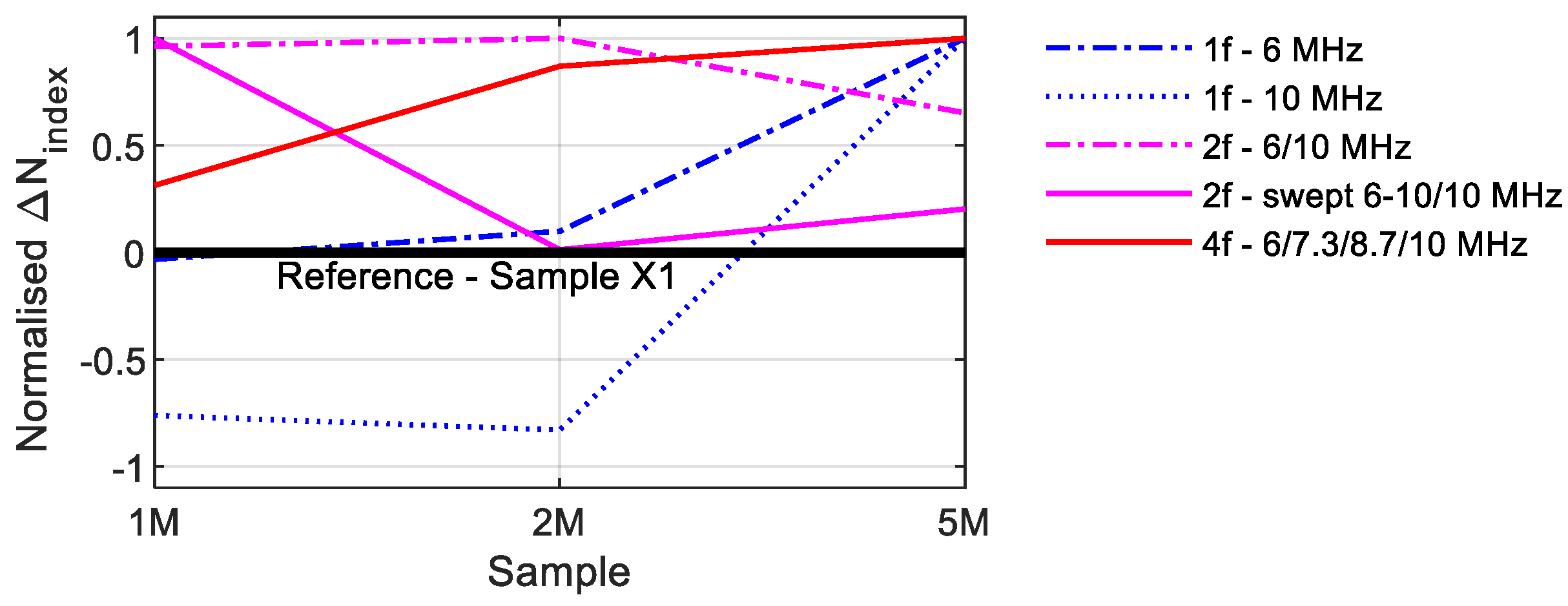
4.2. One-Frequency Excitation
4.3. Two-Frequency Excitation
4.3.1. Constant Frequencies
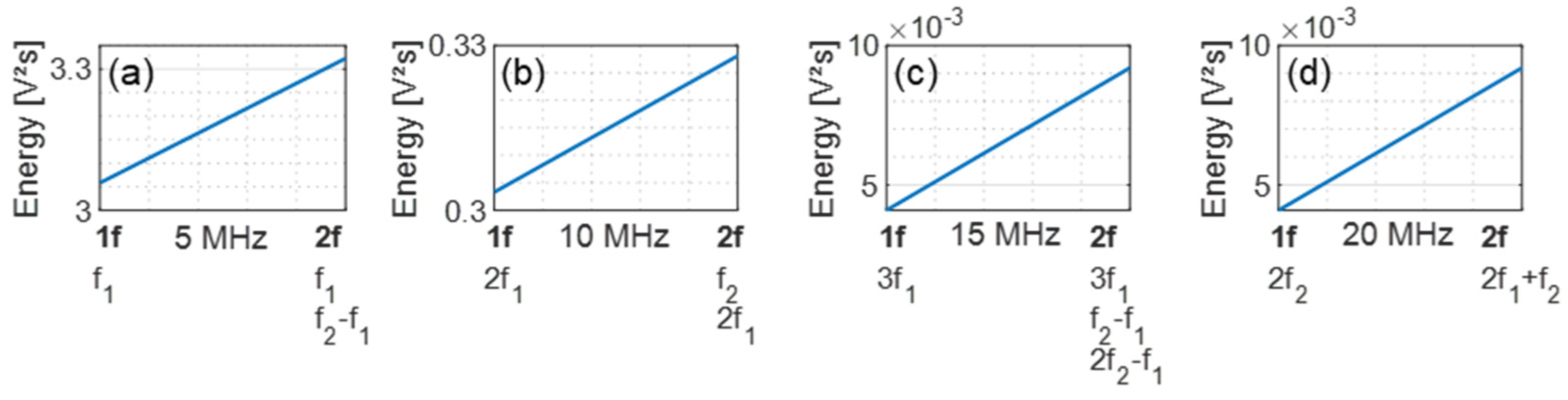
4.3.2. Linear Increasing Frequency
4.4. Four-Frequency Excitation
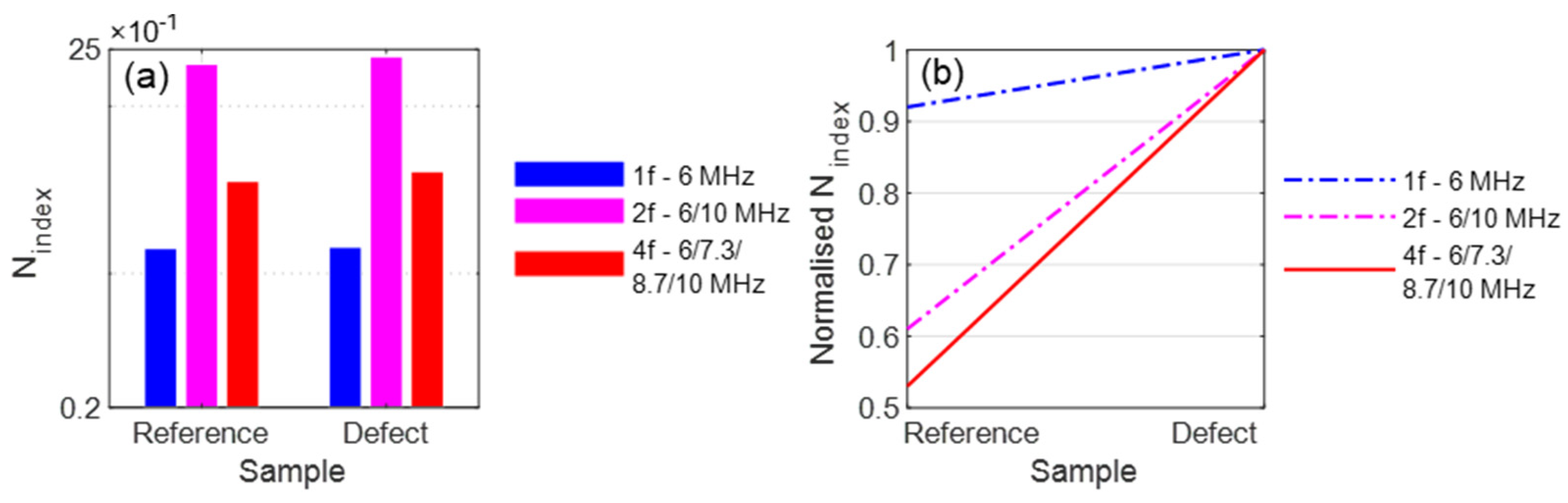
4.5. Results and Discussion
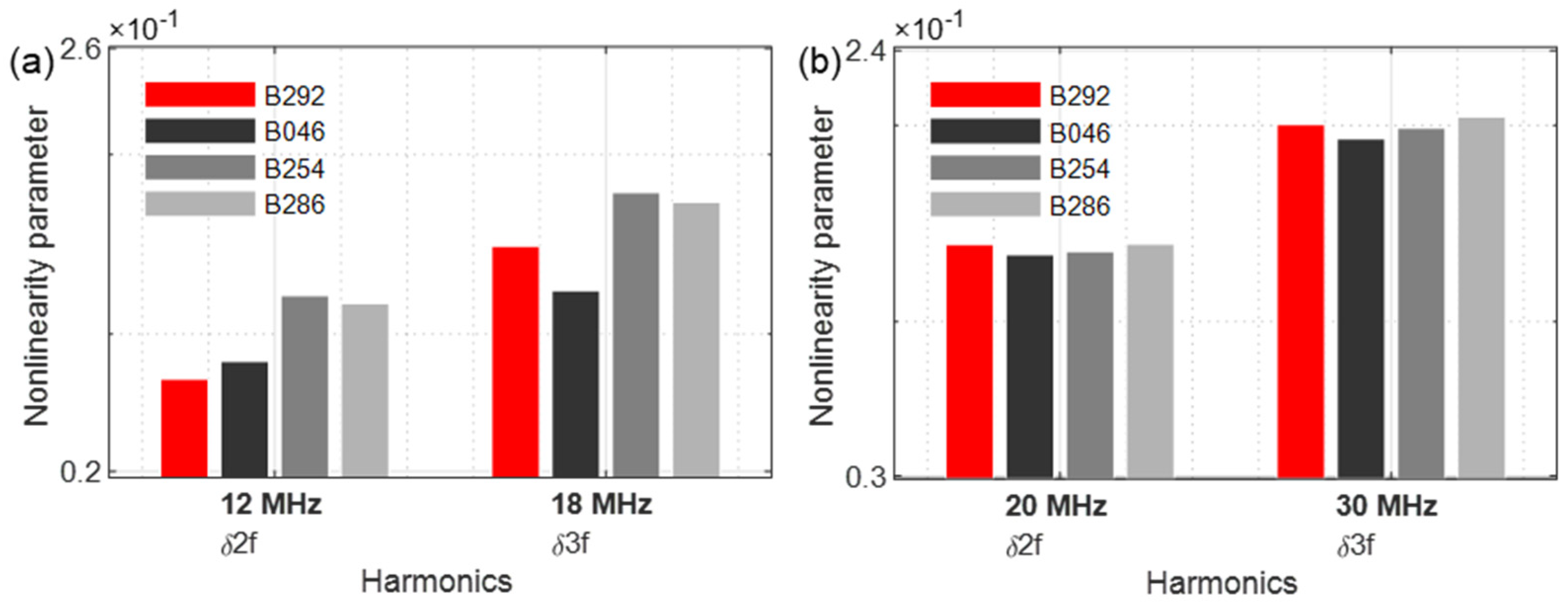
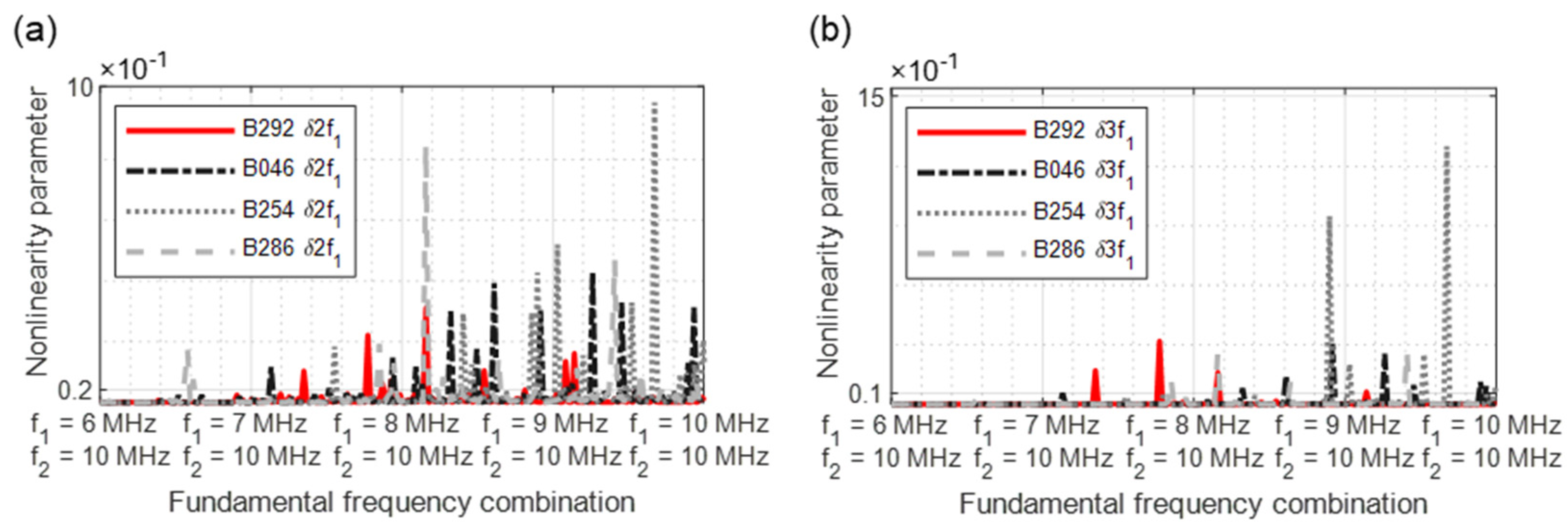
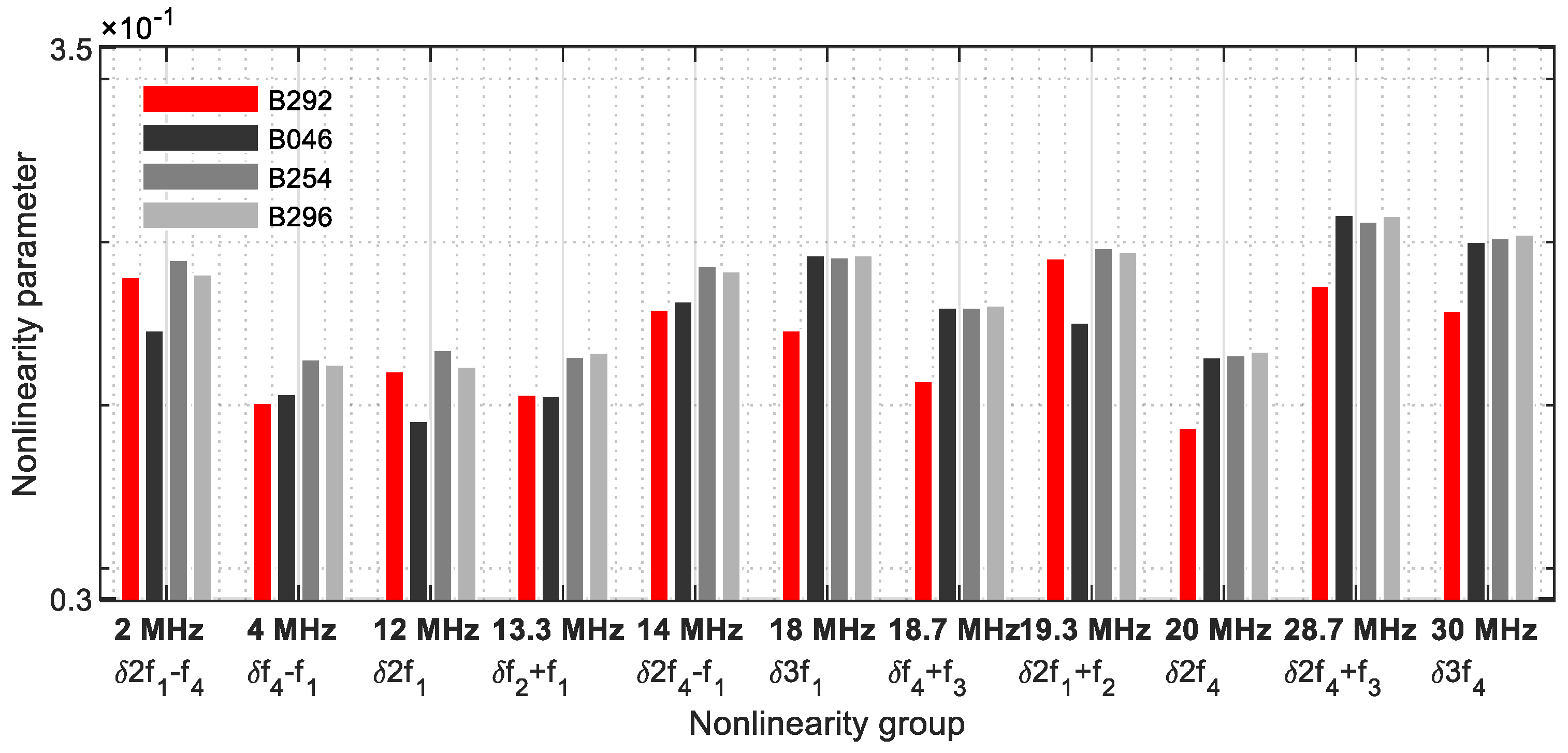
5. Experimental Investigation—Turbine Blades
5.1. Experimental Setup
5.2. Measurements with Results and Discussion
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A
Appendix B

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| One Excitation Frequency | Two Excitation Frequencies | Four Excitation Frequencies | |||
|---|---|---|---|---|---|
| Frequencies | Number | Frequencies | Number | Frequencies | Number |
| - | - | fn | 2 | fn | 4 |
| 2fn | 1 | 2fn | 2 | 2fn | 4 |
| 3fn | 1 | 3fn | 2 | 3fn | 4 |
| - | - | fn ± fm | 2 | fn ± fm | 12 |
| - | - | 2fn ± fm | 4 | 2fn ± fm | 24 |
| - | - | - | - | fn + fm ± fp | 16 |
| ∑2 | ∑12 | ∑64 | |||
References
- Li, Z.L.; Achenbach, J.D. Reflection and Transmission of Rayleigh Surface Waves by a Material Interphase. J. Appl. Mech. 1991, 58, 688–694. [Google Scholar] [CrossRef]
- Achenbach, J.D.; Lin, W.; Keer, L.M. Mathematical modelling of ultrasonic wave scattering by sub-surface cracks. Ultrasonics 1986, 24, 207–215. [Google Scholar] [CrossRef]
- Angel, Y.C.; Achenbach, J.D. Reflection and transmission of obliquely incident Rayleigh waves by a surface-breaking crack. Acoust. Soc. Am. 1983, 74, S87. [Google Scholar] [CrossRef]
- Hikata, A.; Chick, B.B.; Elbaum, C. Dislocation Contribution to the Second Harmonic Generation of Ultrasonic Waves. J. Appl. Phys. 1965, 36, 229–236. [Google Scholar] [CrossRef]
- Cantrell, J.H.; Yost, W.T. Nonlinear ultrasonic characterization of fatigue microstructures. Int. J. Fatigue 2001, 23, 487–490. [Google Scholar] [CrossRef]
- Jhang, K.-Y.; Kim, K.-C. Evaluation of material degradation using nonlinear acoustic effect. Ultrasonics 1999, 37, 39–44. [Google Scholar] [CrossRef]
- Frouin, J.; Sathish, S.; Matikas, T.E.; Na, J.K. Ultrasonic Linear and Nonlinear Behavior of Fatigued Ti–6Al–4V. J. Mater. Res. 1999, 14, 1295–1298. [Google Scholar] [CrossRef]
- Rothenfusser, M.; Mayr, M.; Baumann, J. Acoustic nonlinearities in adhesive joints. Ultrasonics 2000, 38, 322–326. [Google Scholar] [CrossRef]
- Yost, W.T. Nonlinear ultrasonic pulsed measurements and applications to metal processing and fatigue. In Proceedings of the 27th Annual Review of Progress in Quantitative Nondestructive Evaluation, Ames, IA, USA, 16–20 July 2000; pp. 1268–1275. [Google Scholar]
- Jeong, H.; Nahm, S.-H.; Jhang, K.-Y.; Nam, Y.-H. A nondestructive method for estimation of the fracture toughness of CrMoV rotor steels based on ultrasonic nonlinearity. Ultrasonics 2003, 41, 543–549. [Google Scholar] [CrossRef]
- Ostrovsky, L.A.; Johnson, P.A. Dynamic nonlinear elasticity in geomaterials. Riv. Nuovo Cim. 2001, 24, 1–46. [Google Scholar] [CrossRef]
- Malfense Fierro, G.P.; Meo, M. Residual fatigue life estimation using a nonlinear ultrasound modulation method. Smart Mater. Struct. 2015, 24, 25040. [Google Scholar] [CrossRef]
- Malfense Fierro, G.P.; Meo, M. Nonlinear imaging (NIM) of flaws in a complex composite stiffened panel using a constructive nonlinear array (CNA) technique. Ultrasonics 2017, 74, 30–47. [Google Scholar] [CrossRef] [Green Version]
- Malfense Fierro, G.P. Development of Nonlinear Ultrasound Techniques for Multidisciplinary Engineering Applications. Ph.D. Thesis, University of Bath, Bath, UK, 2014. [Google Scholar]
- Jingpin, J.; Xiangji, M.; Cunfu, H.; Bin, W. Nonlinear Lamb wave-mixing technique for micro-crack detection in plates. NDT E Int. 2017, 85, 63–71. [Google Scholar] [CrossRef]
- Amura, M.; Meo, M.; Amerini, F. Baseline-free estimation of residual fatigue life using a third order acoustic nonlinear parameter. Acoust. Soc. Am. 2011, 130, 1829–1837. [Google Scholar] [CrossRef] [Green Version]
- Mevissen, F.; Meo, M. A Nonlinear Ultrasonic Modulation Method for Crack Detection in Turbine Blades. Aerospace 2020, 7, 72. [Google Scholar] [CrossRef]
- Pieczonka, L.; Klepka, A.; Martowicz, A.; Staszewski, W.J. Nonlinear vibroacoustic wave modulations for structural damage detection: An overview. Opt. Eng. 2015, 55, 11005. [Google Scholar] [CrossRef]
- Van den Abeele, K.E.-A.; Johnson, P.A.; Sutin, A. Nonlinear Elastic Wave Spectroscopy (NEWS) Techniques to Discern Material Damage, Part I: Nonlinear Wave Modulation Spectroscopy (NWMS). Res. Nondestruct. Eval. 2000, 12, 17–30. [Google Scholar] [CrossRef]
- Van den Abeele, K.E.-A.; Carmeliet, J.; Ten Cate, J.A.; Johnson, P.A. Nonlinear Elastic Wave Spectroscopy (NEWS) Techniques to Discern Material Damage, Part II: Single-Mode Nonlinear Resonance Acoustic Spectroscopy. Res. Nondestruct. Eval. 2000, 12, 31–42. [Google Scholar] [CrossRef]
- Straka, L.; Yagodzinskyy, Y.; Landa, M.; Hänninen, H. Detection of structural damage of aluminum alloy 6082 using elastic wave modulation spectroscopy. NDT E Int. 2008, 41, 554–563. [Google Scholar] [CrossRef]
- Greenhall, J.; Grutzik, S.; Graham, A.; Sinha, D.N.; Pantea, C. Nonlinear acoustic crack detection in thermoelectric wafers. Mech. Syst. Signal Process. 2020, 139, 106598. [Google Scholar] [CrossRef]
- Fan, C.; Yang, L.; Zhao, Y. Ultrasonic multi-frequency time-reversal-based imaging of extended targets. NDT E Int. 2020, 113, 102276. [Google Scholar] [CrossRef]
- Queirós, R.; Corrêa Alegria, F.; Silva Girão, P.; Cruz Serra, A. A multi-frequency method for ultrasonic ranging. Ultrasonics 2015, 63, 86–93. [Google Scholar] [CrossRef] [PubMed]
- Novak, A.; Bentahar, M.; Tournat, V.; El Guerjouma, R.; Simon, L. Nonlinear acoustic characterization of micro-damaged materials through higher harmonic resonance analysis. NDT E Int. 2012, 45, 1–8. [Google Scholar] [CrossRef]
- Pfleiderer, K.; Aufrecht, J.; Solodov, I.; Busse, G. Multi-frequency ultrasonic NDE for early defect recognition and imaging. IEEE Ultrason. Symp. 2004, 1, 693–696. [Google Scholar]
- Abraham, S.T.; Shivaprasad, S.; Sreevidya, N.; Das, C.R.; Albert, S.K.; Venkatraman, B.; Balasubramaniam, K. A Novel Multi-frequency Nonlinear Ultrasonic Approach for the Characterization of Annealed Polycrystalline Microstructure. Metall. Mater. Trans. A 2019, 50, 5567–5573. [Google Scholar] [CrossRef]
- Gao, T.; Sun, H.; Hong, Y.; Qing, X. Hidden corrosion detection using laser ultrasonic guided waves with multi-frequency local wavenumber estimation. Ultrasonics 2020, 108, 106182. [Google Scholar] [CrossRef]
- Malfense Fierro, G.P.; Meo, M. Non-linear Phased Array Imaging of Flaws Using a Dual and Tri Frequency Modulation Technique. Front. Built Environ. 2020, 6, 68. [Google Scholar] [CrossRef]
- Deng, M. Cumulative second-harmonic generation accompanying nonlinear shear horizontal mode propagation in a solid plate. J. Appl. Phys. 1998, 84, 3500–3505. [Google Scholar]
- Deng, M. Cumulative second-harmonic generation of Lamb-mode propagation in a solid plate. J. Appl. Phys. 1999, 85, 3051–3058. [Google Scholar] [CrossRef]
- Pruell, C.; Kim, J.-Y.; Qu, J.; Jacobs, L.J. Evaluation of fatigue damage using nonlinear guided waves. Smart Mater. Struct. 2009, 18, 35003. [Google Scholar] [CrossRef]
- Pruell, C.; Kim, J.-Y.; Qu, J.; Jacobs, L.J. Evaluation of plasticity driven material damage using Lamb waves. Appl. Phys. Lett. 2007, 91, 231911. [Google Scholar] [CrossRef]
- Niethammer, M.; Jacobs, L.J.; Qu, J.; Jarzynski, J. Time-frequency representations of Lamb waves. J. Acoust. Soc. Am. 2001, 109, 1841–1847. [Google Scholar] [CrossRef] [Green Version]
- Herrmann, J.; Kim, J.-Y.; Jacobs, L.J.; Qu, J.; Littles, J.W.; Savage, M.F. Assessment of material damage in a nickel-base superalloy using nonlinear Rayleigh surface waves. J. Appl. Phys. 2006, 99, 124913. [Google Scholar] [CrossRef]
- Mevissen, F.; Meo, M. Detection of Cracks in Turbine Blades with Nonlinear Ultrasonic Frequency Modulation. In Proceedings of the 12th International Workshop on Structural Health Monitoring: Enabling Intelligent Life-Cycle Health Management for Industry Internet of Things (IIOT), IWSHM 2019, Stanford, CL, USA, 10–12 September 2019; pp. 824–834. [Google Scholar]
- Malfense Fierro, G.P.; Meo, M. IWSHM 2017: Structural health monitoring of the loosening in a multi-bolt structure using linear and modulated nonlinear ultrasound acoustic moments approach. Struct. Health Monit. 2018, 17, 1349–1364. [Google Scholar] [CrossRef]
- Amerini, F.; Meo, M. Structural health monitoring of bolted joints using linear and nonlinear acoustic/ultrasound methods. Struct. Health Monit. 2011, 10, 659–672. [Google Scholar] [CrossRef]
- Blanloeuil, P.; Rose, L.; Guinto, J.A.; Veidt, M.; Wang, C.H. Closed crack imaging using time reversal method based on fundamental and second harmonic scattering. Wave Motion 2016, 66, 156–176. [Google Scholar] [CrossRef] [Green Version]
- Ohara, Y.; Mihara, T.; Sasaki, R.; Ogata, T.; Yamamoto, S.; Kishimoto, Y.; Yamanaka, K. Imaging of closed cracks using nonlinear response of elastic waves at subharmonic frequency. Appl. Phys. Lett. 2007, 90, 11902. [Google Scholar] [CrossRef]




































| Frequency | Nonlinearity Parameter |
|---|---|
| 1 | |
| 1 | |
| 1 | |
| 1,2 | |
| 1,3 | |
| 1,3 |
| Group | Frequency [MHz] | Nonlinearity Parameter Group | ||
|---|---|---|---|---|
| 1 | 1 | 2 | 2f1 − f4 | |
| 1 | 4 | f4 − f1 | ||
| 1 | 12 | 2f1 | ||
| 1 | 13.3 | f2 + f1 | ||
| 1 | 14 | 2f4 − f1 | ||
| 1 | 18 | 3f1 | ||
| 1 | 18.7 | f4 + f3 | ||
| 1 | 19.3 | 2f1 + f2 | ||
| 1 | 20 | 2f4 | ||
| 1 | 28.7 | 2f4 + f3 | ||
| 1 | 30 | 3f4 |
| Group | Frequency [MHz] | Nonlinearity Parameter Group | ||
|---|---|---|---|---|
| 2 | 1 | 2.6 | f3 − f1 | |
| 2 | f4 − f2 | |||
| 1 | 3.3 | f1 + f2 − f4 | ||
| 2 | 2f1 − f3 | |||
| 1 | 12.6 | f3 + f4 − f1 | ||
| 2 | 2f4 − f2 | |||
| 1 | 14.7 | 2f2 | ||
| 2 | f3 + f1 | |||
| 1 | 16 | f4 + f1 | ||
| 2 | f3 + f2 | |||
| 1 | 17.3 | 2f3 | ||
| 2 | f4 + f2 | |||
| 1 | 20.7 | 2f1 + f3 | ||
| 2 | 2f2 + f1 | |||
| 1 | 27.3 | 2f3 + f4 | ||
| 2 | 2f4 + f2 |
| Group | Frequency [MHz] | Nonlinearity Parameter Group | ||
|---|---|---|---|---|
| 3 | 1 | 1.3 | f2 − f1 | |
| 2 | f3 − f2 | |||
| 3 | f4 − f3 | |||
| 1 | 6 | f1 | ||
| 2 | 2f2 − f3 | |||
| 3 | f2 + f3 − f4 | |||
| 1 | 10 | f4 | ||
| 2 | 2f3 − f2 | |||
| 3 | f2 + f3 − f1 | |||
| 1 | 22 | 3f2 | ||
| 2 | 2f1 + f4 | |||
| 3 | f1 + f2 + f3 | |||
| 1 | 23.3 | 2f2 + f3 | ||
| 2 | 2f3 + f1 | |||
| 3 | f1 + f2 + f4 | |||
| 1 | 24.7 | 2f2 + f4 | ||
| 2 | 2f3 + f2 | |||
| 3 | f1 + f3 + f4 | |||
| 1 | 26 | 3f3 | ||
| 2 | 2f4 + f1 | |||
| 3 | f2 + f3 + f4 |
| Group | Frequency [MHz] | Nonlinearity Parameter Group | ||
|---|---|---|---|---|
| 4 | 1 | 4.6 | 2f2 − f4 | |
| 2 | f1 + f2 − f3 | |||
| 3 | f1 + f3 − f4 | |||
| 4 | 2f1 − f2 | |||
| 1 | 7.3 | 2f3 − f4 | ||
| 2 | f2 | |||
| 3 | f1 + f3 − f2 | |||
| 4 | f1 + f4 − f3 | |||
| 1 | 8.7 | f3 | ||
| 2 | 2f2 − f1 | |||
| 3 | f2 + f4 − f3 | |||
| 4 | f1 + f4 − f2 | |||
| 1 | 11.3 | 2f3 − f1 | ||
| 2 | f2 + f4 − f1 | |||
| 3 | f3 + f4 − f2 | |||
| 4 | 2f4 − f3 |
| Group | Γf/h/s | Frequency [MHz] |
|---|---|---|
| - | 2f1 − f2 | 0 |
| 1 | f1 | 5 |
| f2 − f1 | 5 | |
| 2 | f2 | 10 |
| 2f1 | 10 | |
| 3 | 3f1 | 15 |
| f2 + f1 | 15 | |
| 2f2 − f1 | 15 | |
| 4 | 2f2 | 20 |
| 2f1 + f2 | 20 | |
| - | 2f2 + f1 | 25 |
| - | 3f2 | 30 |
| Blade | Crack Position [Cooling Air Outlet Chamber (Figure 26)] | Crack Length [mm] |
|---|---|---|
| B292 | - | - |
| B046 | 2 | 6.0 |
| B254 | 3 | 6.8 |
| B286 | 6 | 6.1 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mevissen, F.; Meo, M. Nonlinear Ultrasound Crack Detection with Multi-Frequency Excitation—A Comparison. Sensors 2021, 21, 5368. https://doi.org/10.3390/s21165368
Mevissen F, Meo M. Nonlinear Ultrasound Crack Detection with Multi-Frequency Excitation—A Comparison. Sensors. 2021; 21(16):5368. https://doi.org/10.3390/s21165368
Chicago/Turabian StyleMevissen, Frank, and Michele Meo. 2021. "Nonlinear Ultrasound Crack Detection with Multi-Frequency Excitation—A Comparison" Sensors 21, no. 16: 5368. https://doi.org/10.3390/s21165368
APA StyleMevissen, F., & Meo, M. (2021). Nonlinear Ultrasound Crack Detection with Multi-Frequency Excitation—A Comparison. Sensors, 21(16), 5368. https://doi.org/10.3390/s21165368