
Frequency Analysis of Acoustic Data Using Multiple-Measurement Sparse Bayesian Learning


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Signal Model for the Frequency Analysis
3. Introduction of Sparse Bayesian Learning
3.1. Single-Measurement SBL
3.2. Multiple-Measurement SBL
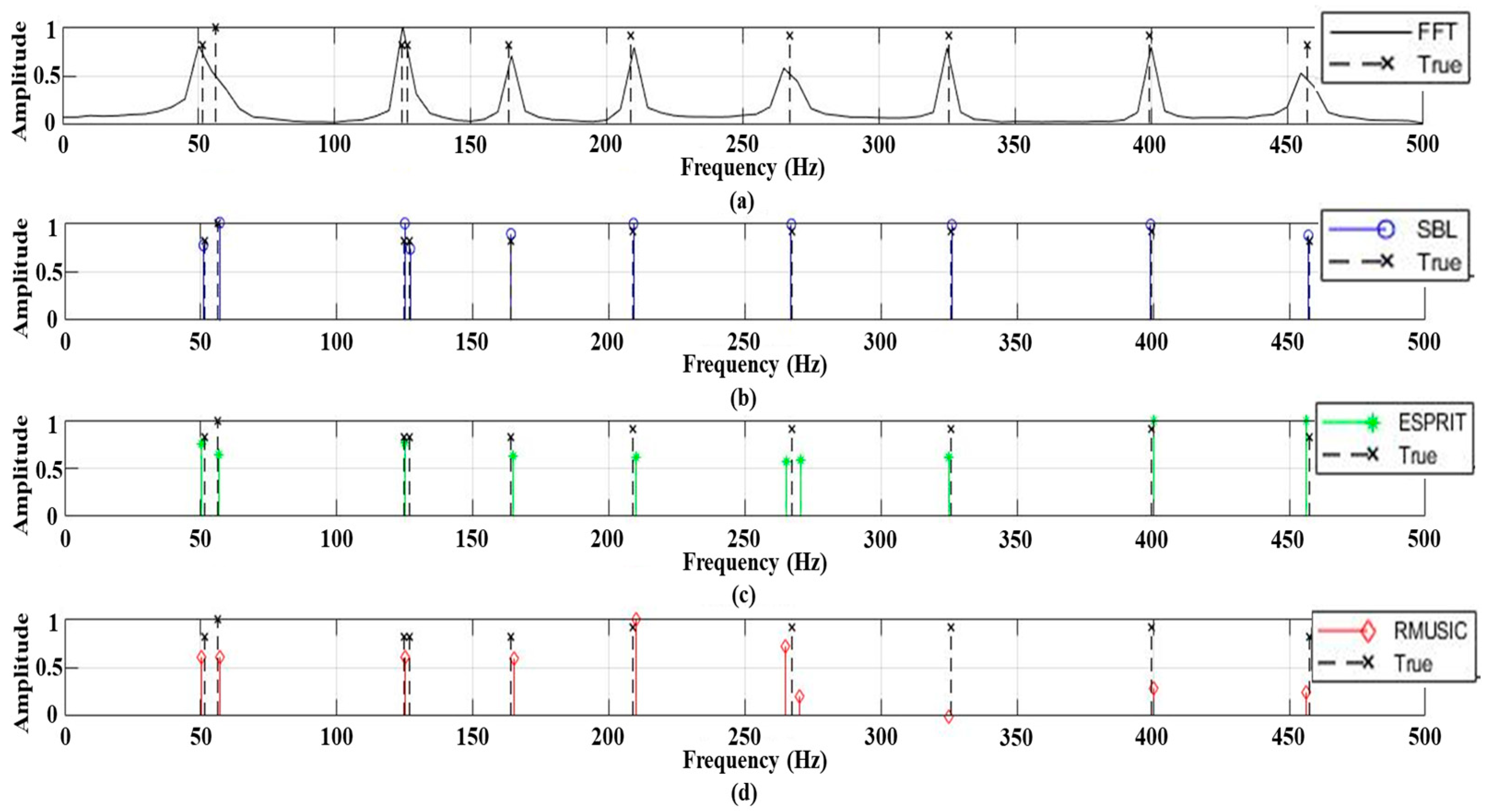
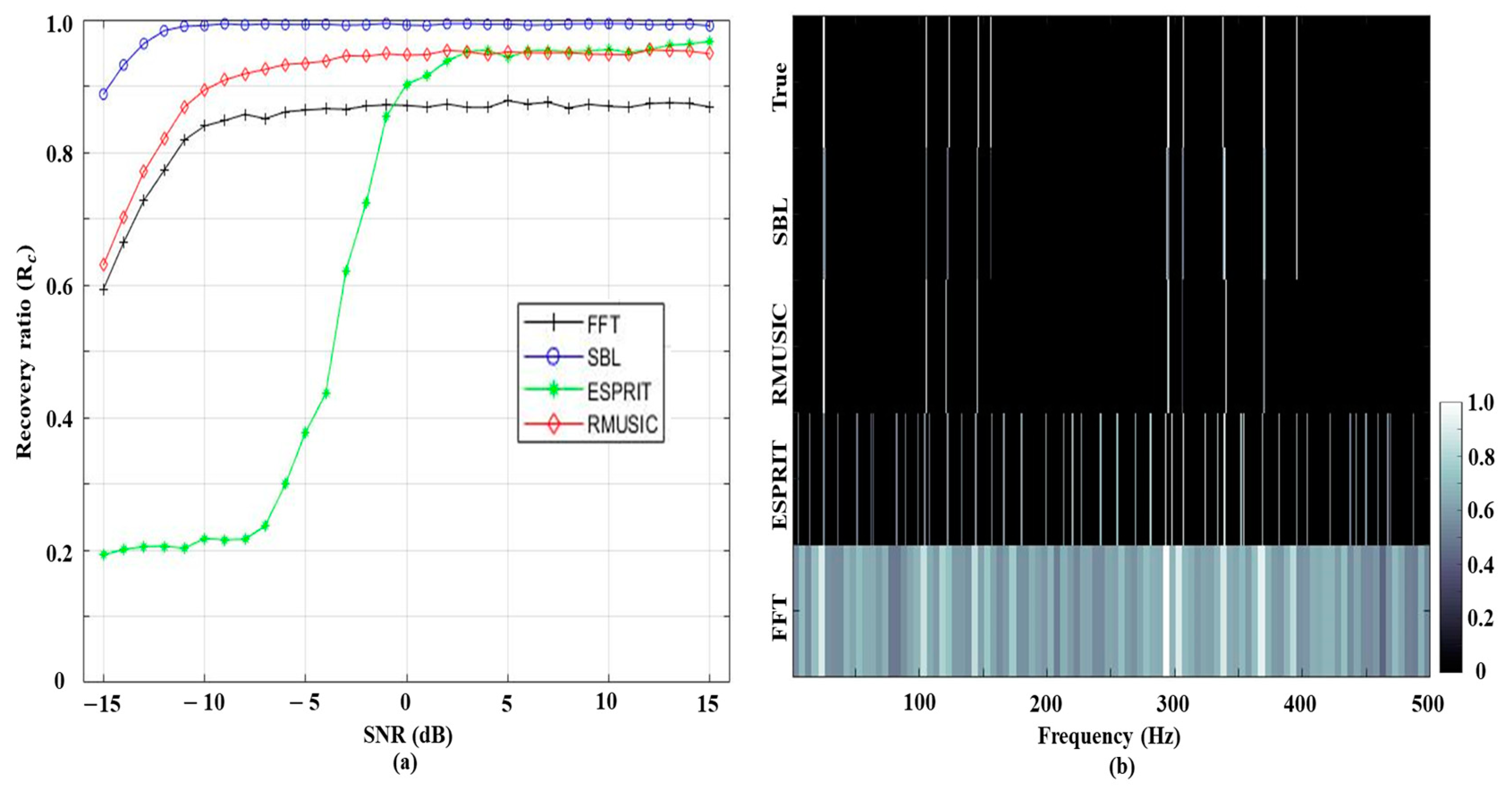
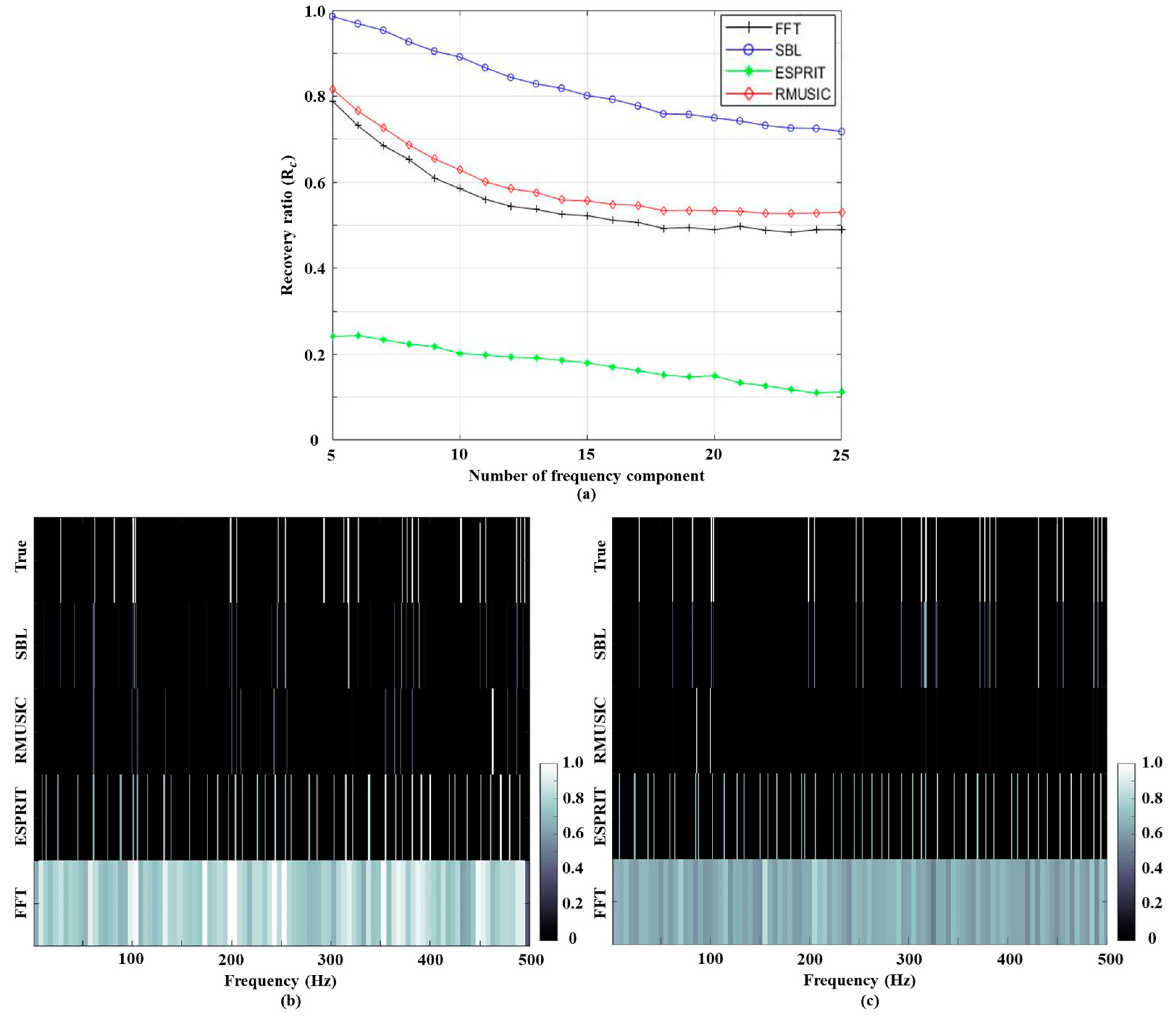
4. Frequency Analysis Using Synthetic Data
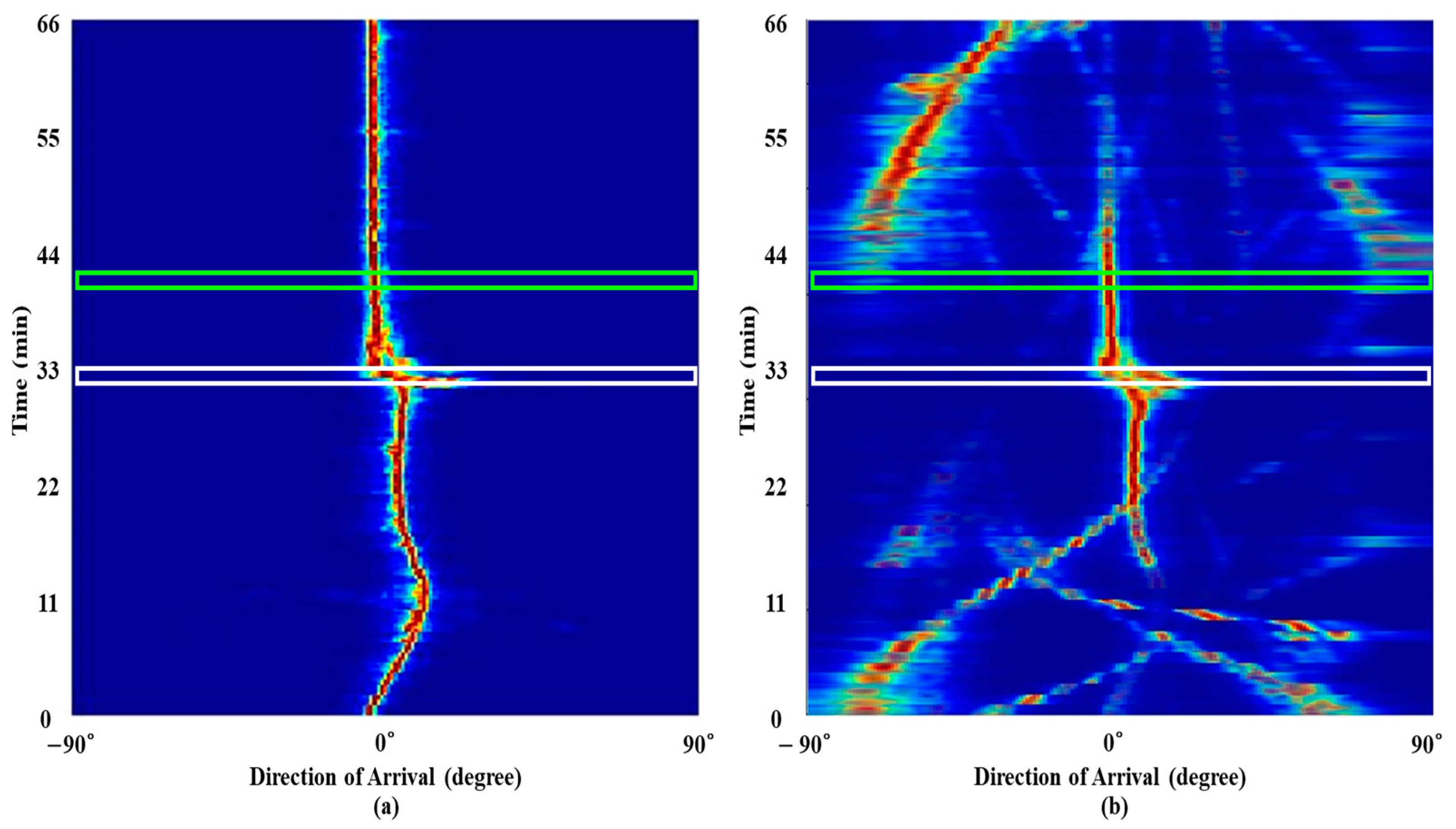
5. Frequency Analysis Using the Underwater In-Situ Data
5.1. Signals in the Experiment
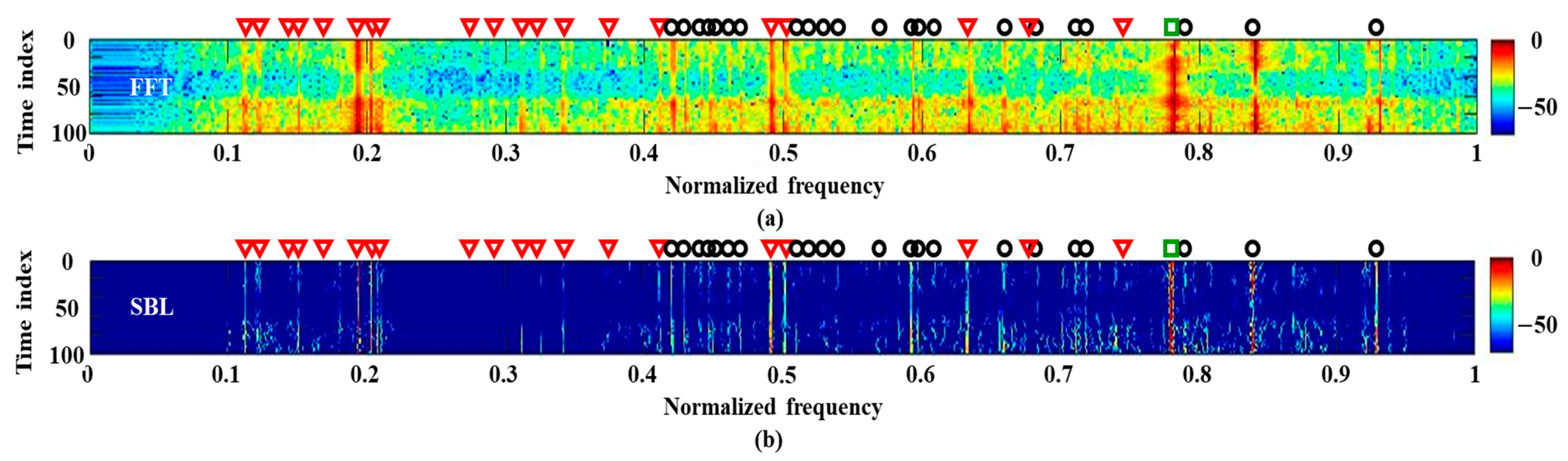
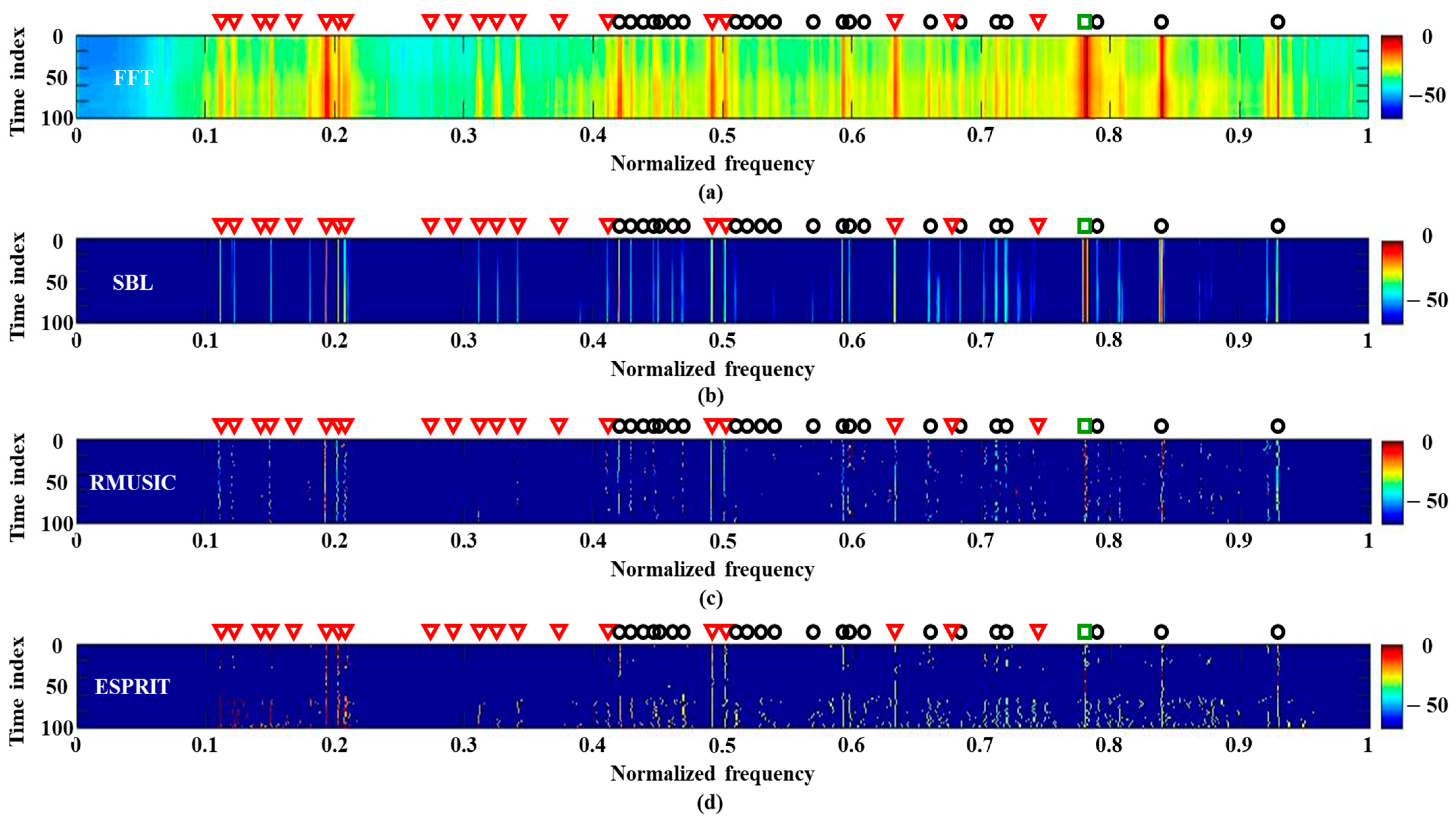
5.2. Frequency Analysis Using a Single Measurement
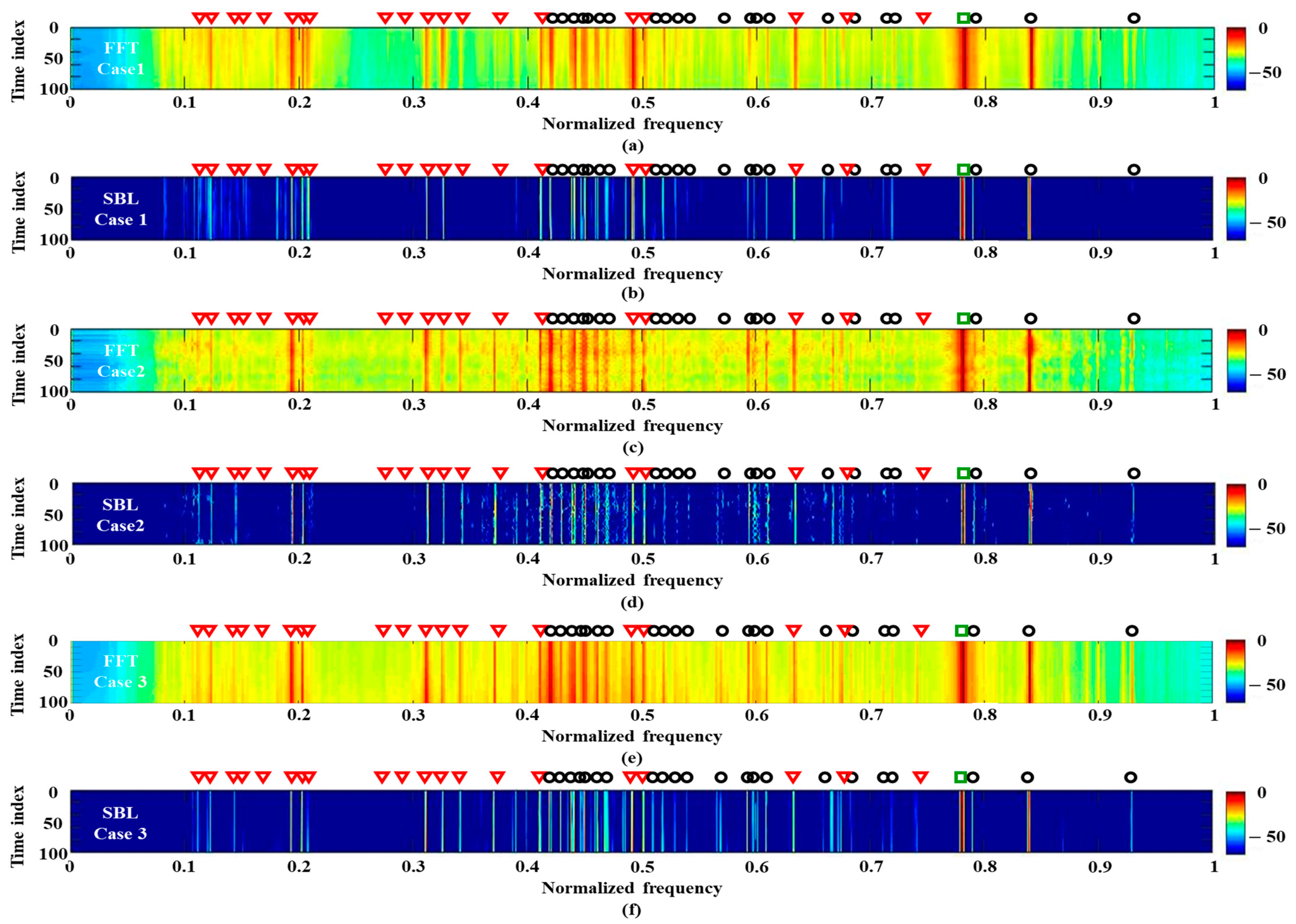
5.3. Frequency Analysis Using Multiple Measurements
- Case 1: ;
- Case 2: ;
- Case 3:
6. Discussion
7. Summary
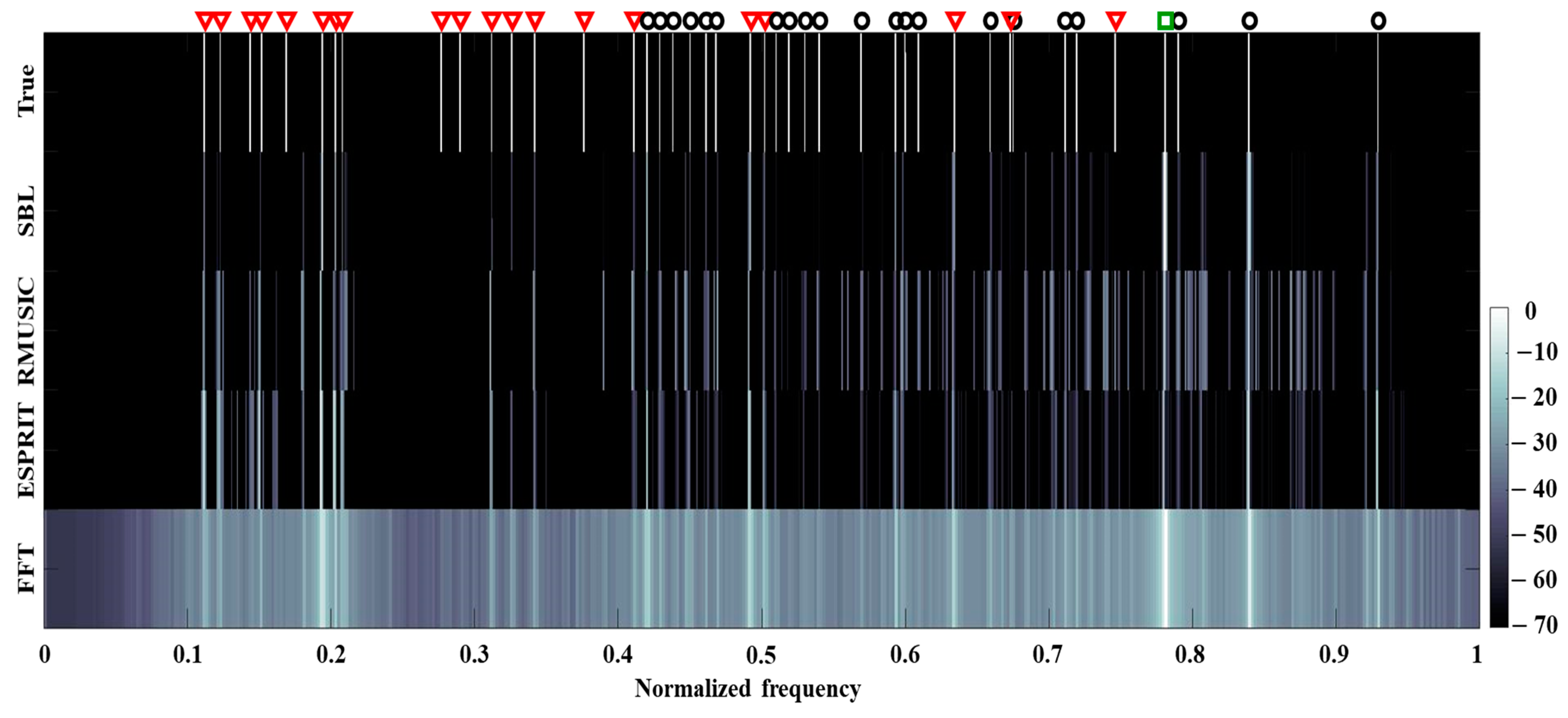
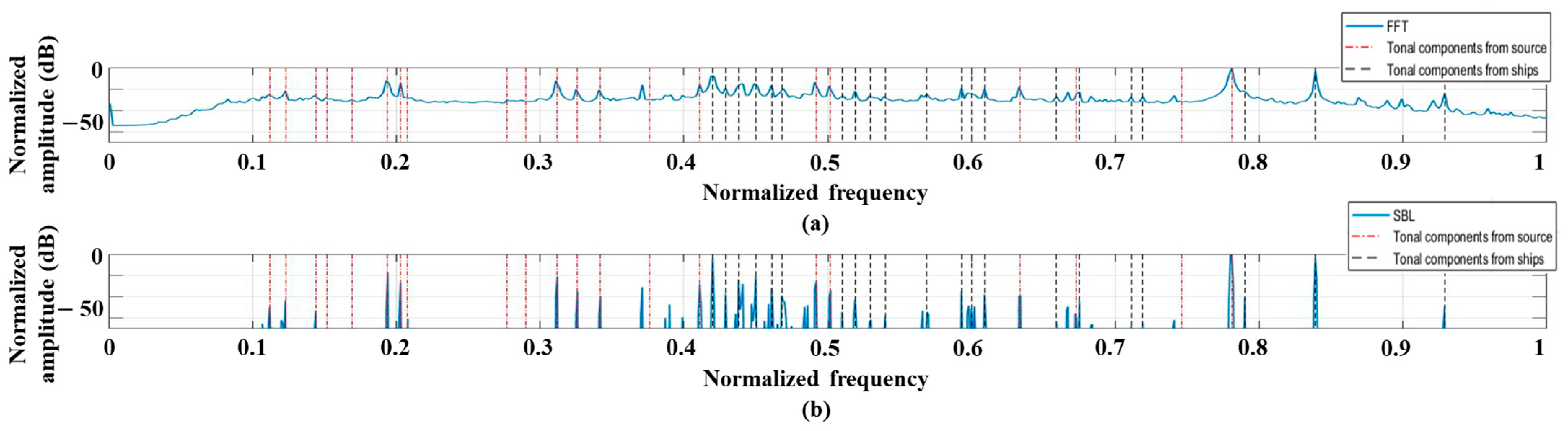
- The overall noise is significantly reduced by the sparse estimation of the SBL, which enables a higher resolution and recovery performance than other frequency analysis algorithms such as FFT, ESPRIT, and RMUSIC;
- The SBL using temporal multiple measurements has clean and consistent frequency component results, but it overlooked some signal components;
- The SBL using spatial multiple measurements has advantages in detecting the lost signal components at the cost of vaguer detection results having wiggling frequency components smeared by the adjacent noise.
- The SBL using both temporal and spatial multiple measurements has high recovery performance (advantage of the SBL using spatial multiple measurements) as well as clean and consistent frequency detections (advantage of the SBL using temporal multiple measurements).
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Allahparast, M.S.; Allahparast, S.; Laschi, C. An improved tracking algorithm for underwater vessels using the passive sonar. In Proceedings of the 2016 Indian Control Conference (ICC), Hyderabad, India, 4–6 January 2016; pp. 426–431. [Google Scholar]
- Fortmann, T.; Bar-shalom, Y.; Scheffe, M. Sonar tracking of multiple targets using joint probabilistic data association. IEEE J. Ocean. Eng. 1983, 8, 173–184. [Google Scholar] [CrossRef] [Green Version]
- Cho, H.; Lim, J.; Ku, B.; Cheong, M.; Seo, I.; Ko, H.; Hong, W. Underwater radiated signal analysis in the modulation spectrogram domain. IEICE Trans. 2015, 8, 1751–1759. [Google Scholar] [CrossRef]
- Roy, R.; Kailath, T. ESPRIT-Estimation of Signal Parameters via Rotational Invariance Techniques. IEEE Trans. Acoust. Speech Signal. Process. 1989, 37, 984–995. [Google Scholar] [CrossRef] [Green Version]
- Barabell, A. Improving the resolution performance of eigenstructure-based direction-finding algorithms. In Proceedings of the ICASSP’83, IEEE International Conference on Acoustics, Speech, and Signal Processing, Boston, MA, USA, 14–16 April 1983; Volume 8, pp. 336–339. [Google Scholar]
- Donoho, D.L. Compressed Sensing. IEEE Trans. Inf. Theory 2006, 52, 1289–1306. [Google Scholar] [CrossRef]
- Waweru, N.P.; Konditi, D.; Langat, P.K. Performance Analysis of MUSIC, Root-MUSIC and ESPRIT DOA Estimation Algorithm. Int. J. Electr. Comput. Energetic Electron. Commun. Eng. 2014, 8, 209–216. [Google Scholar]
- Garcia Guzman, Y.E.; Lunglmayr, M. Adaptive Sparse Cyclic Coordinate Descent for Sparse Frequency Estimation. Signals 2021, 2, 189–200. [Google Scholar] [CrossRef]
- Karabulut, G.; Kurt, T.; Yongaçoglu, A. Estimation of Directions of Arrival by Matching Pursuit (EDAMP). J. Wirel. Commun. Netw. 2005, 2005, 618605. [Google Scholar] [CrossRef] [Green Version]
- Qi, B.; Zhang, H.; Zhang, X. Time-frequency DOA estimation of chirp signals based on multi-subarray. Digit. Signal Process. 2021, 113, 103–131. [Google Scholar] [CrossRef]
- Duarte, M.F.; Baraniuk, R.G. Spectral compressive sensing. Appl. Comput. Harmon. Anal. 2013, 35, 111–129. [Google Scholar] [CrossRef]
- Fang, J.; Wang, F.; Shen, Y.; Li, H.; Blum, R. Super-resolution compressed sensing for line spectral estimation: An iterative reweighted approach. IEEE Trans. Signal Process. 2016, 64, 4649–4662. [Google Scholar] [CrossRef]
- Xenaki, A.; Gerstoft, P.; Mosegaard, K. Compressive beamforming. J. Acoust. Soc. Am. 2014, 136, 260–271. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Gerstoft, P.; Xenaki, A.; Mecklenbreauker, C.F. Multiple and single snapshot compressive beamforming. J. Acoust. Soc. Am. 2015, 138, 2003–2014. [Google Scholar] [CrossRef] [Green Version]
- Edelmann, G.F.; Gaumond, C.F. Beamforming using compressive sensing. J. Acoust. Soc. Am. 2011, 130, EL232–EL237. [Google Scholar] [CrossRef] [Green Version]
- Fortunati, S.; Grasso, R.; Gini, F.; Greco, M.S.; LePage, K. Single snapshot DOA estimation by using compressed sensing. EURASIP J. Adv. Signal Process. 2014, 2014, 120. [Google Scholar] [CrossRef] [Green Version]
- Choo, Y.; Seong, W. Compressive spherical beamforming for localization of incipient tip vortex cavitation. J. Acoust. Soc. Am. 2016, 140, 4085–4090. [Google Scholar] [CrossRef] [PubMed]
- Park, Y.; Choo, Y.; Seong, W. Multiple snapshot grid free compressive beamforming. J. Acoust. Soc. Am. 2018, 143, 3849–3859. [Google Scholar] [CrossRef] [Green Version]
- Bhaskar, B.N.; Tang, G.; Recht, B. Atomic norm denoising with applications to line spectral estimation. IEEE Trans. Signal Process. 2013, 61, 5987–5999. [Google Scholar] [CrossRef] [Green Version]
- Li, Y.; Chi, Y. Off-the-Grid Line Spectrum Denoising and Estimation with Multiple Measurement Vectors. IEEE Trans. Signal Process. 2015, 64, 1257–1269. [Google Scholar] [CrossRef] [Green Version]
- Kim, J.; Kim, J.; Nguyen, L.T.; Shim, B.; Hong, W. Tonal Signal Detection in Passive Sonar Systems using Atomic Norm Minimization. EURASHIP J. Adv. Signal Process. 2019, 2019, 43. [Google Scholar] [CrossRef] [Green Version]
- Tipping, M.E. Sparse Bayesian Learning and the Relevance Vector Machine. J. Mach. Learn. Res. 2001, 1, 211–244. [Google Scholar]
- Wipf, D.P.; Rao, B.D. Sparse Bayesian Learning for Basis Selection. IEEE Trans. Signal Process. 2004, 52, 2153–2164. [Google Scholar] [CrossRef]
- Gerstoft, P.; Mecklenbrauker, C.F.; Xenaki, A.; Nannuru, S. Multisnapshot Sparse Bayesian Learning for DOA. IEEE Signal Process. Lett. 2016, 23, 1469–1473. [Google Scholar] [CrossRef] [Green Version]
- Wu, X.; Zhu, W.P.; Yan, J. Direction of Arrival Estimation for Off-Grid Signals Based on Sparse Bayesian Learning. IEEE Sens. J. 2016, 16, 2004–2016. [Google Scholar] [CrossRef]
- Das, A. Theoretical and Experimental Comparison of Off-Grid Sparse Bayesian Direction-of-Arrival Estimation Algorithms. IEEE Access 2017, 5, 18075–18087. [Google Scholar] [CrossRef]
- Chen, F.; Dai, J.; Hu, N.; Ye, Z. Sparse Bayesian learning for off-grid DOA estimation with nested arrays. Digit. Signal Process. 2018, 82, 187–193. [Google Scholar] [CrossRef]
- Yang, J.; Liao, G.; Li, J. An efficient off-grid DOA estimation approach for nested array signal processing by using sparse Bayesian learning strategies. Signal Process. 2016, 128, 110–122. [Google Scholar] [CrossRef]
- Das, A.; Sejnowski, T.J. Narrowband and Wideband Off-Grid Direction-of-Arrival Estimation via Sparse Bayesian Learning. IEEE J. Ocean. Eng. 2018, 43, 108–118. [Google Scholar] [CrossRef]
- Qin, Y.; Liu, Y.; Liu, J.; Yu, Z. Underdetermined Wideband DOA Estimation for Off-Grid Sources with Coprime Array Using Sparse Bayesian Learning. Sensors 2018, 18, 253. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Liu, Z.M.; Huang, Z.T.; Zhou, Y.Y. An Efficient Maximum Likelihood Method for Direction-of-Arrival Estimation via Sparse Bayesian Learning. IEEE Trans. Wirel. Commun. 2012, 11, 3067–3617. [Google Scholar] [CrossRef]
- Nannuru, S.; Koochakzadeh, A.; Gemba, K.L.; Pal, P.; Gerstoft, P. Sparse Bayesian learning for beamforming using sparse linear arrays. J. Acoust. Soc. Am. 2018, 144, 2719–2729. [Google Scholar] [CrossRef]
- Nannuru, S.; Gemba, K.L.; Gerstoft, P.; Hodgkiss, W.S.; Mecklenbrauker, C.F. Sparse Bayesian Learning with multiple dictionaries. Signal Process. 2019, 159, 159–170. [Google Scholar] [CrossRef] [Green Version]
- Gerstoft, P.; Nannuru, S.; Mechlenbrauker, C.F.; Leus, G. DOA Estimation in heteroscedastic noise. Signal Process. 2019, 161, 63–73. [Google Scholar] [CrossRef]
- Park, Y.; Meyer, F.; Gerstoft, P. Sequential sparse Bayesian learning for time-varying direction of arrival. J. Acoust. Soc. Am. 2021, 149, 2089. [Google Scholar] [CrossRef] [PubMed]
- Gemba, K.L.; Nannuru, S.; Gerstoft, P.; Hodgkiss, W.S. Multi-frequency sparse Bayesian learning for robust matched field processing. J. Acoust. Soc. Am. 2017, 141, 3411–3420. [Google Scholar] [CrossRef] [Green Version]
- Xenaki, A.; Boldt, J.B.; Christensen, M.G. Sound source localization and speech enhancement with sparse Bayesian learning beamforming. J. Acoust. Soc. Am. 2018, 143, 3912–3921. [Google Scholar] [CrossRef] [PubMed]
- Ping, G.; Grande, E.F.; Gerstoft, P.; Chu, Z. Three-dimensional source localization using sparse Bayesian learning on a spherical microphone array. J. Acoust. Soc. Am. 2020, 147, 3895–3904. [Google Scholar] [CrossRef]
- Niu, H.; Gerstoft, P.; Pzanich, E.; Li, Z.; Zhang, R.; Gong, Z.; Wang, H. Block sparse Bayesian learning for broadband mode extraction in shallow water from a vertical array. J. Acoust. Soc. Am. 2020, 147, 3729–3739. [Google Scholar] [CrossRef]
- Johnson, D.H.; Dudgeon, D.E. Array Signal Processing; Simon & Schuster, Inc.: New York, NY, USA, 1993. [Google Scholar]
- Abraham, D.A. Underwater Acoustic Signal Processing; Springer Nature Switzerland AG: Cham, Switzerland, 2019; pp. 225–230. [Google Scholar]
- Michael, A. Principle of Sonar Performance Modeling; Springer: Berlin/Heidelberg, Germany, 2010; pp. 251–310. [Google Scholar]
- Schilling, R.J. Fundamental of Digital Signal Processing; Cengage Learning: New York, NY, USA, 2011; pp. 10–45. [Google Scholar]
- Stoica, P.; Nehorai, A. On the concentrated stochastic likelihood function in array processing. Circuits Syst. Signal Process. 1995, 14, 669–674. [Google Scholar] [CrossRef]









Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shin, M.; Hong, W.; Lee, K.; Choo, Y. Frequency Analysis of Acoustic Data Using Multiple-Measurement Sparse Bayesian Learning. Sensors 2021, 21, 5827. https://doi.org/10.3390/s21175827
Shin M, Hong W, Lee K, Choo Y. Frequency Analysis of Acoustic Data Using Multiple-Measurement Sparse Bayesian Learning. Sensors. 2021; 21(17):5827. https://doi.org/10.3390/s21175827
Chicago/Turabian StyleShin, Myoungin, Wooyoung Hong, Keunhwa Lee, and Youngmin Choo. 2021. "Frequency Analysis of Acoustic Data Using Multiple-Measurement Sparse Bayesian Learning" Sensors 21, no. 17: 5827. https://doi.org/10.3390/s21175827
APA StyleShin, M., Hong, W., Lee, K., & Choo, Y. (2021). Frequency Analysis of Acoustic Data Using Multiple-Measurement Sparse Bayesian Learning. Sensors, 21(17), 5827. https://doi.org/10.3390/s21175827