
Neural-Network Based Modeling of I/O Buffer Predriver under Power/Ground Supply Voltage Variations


 , ,
, , 
Abstract
:1. Introduction
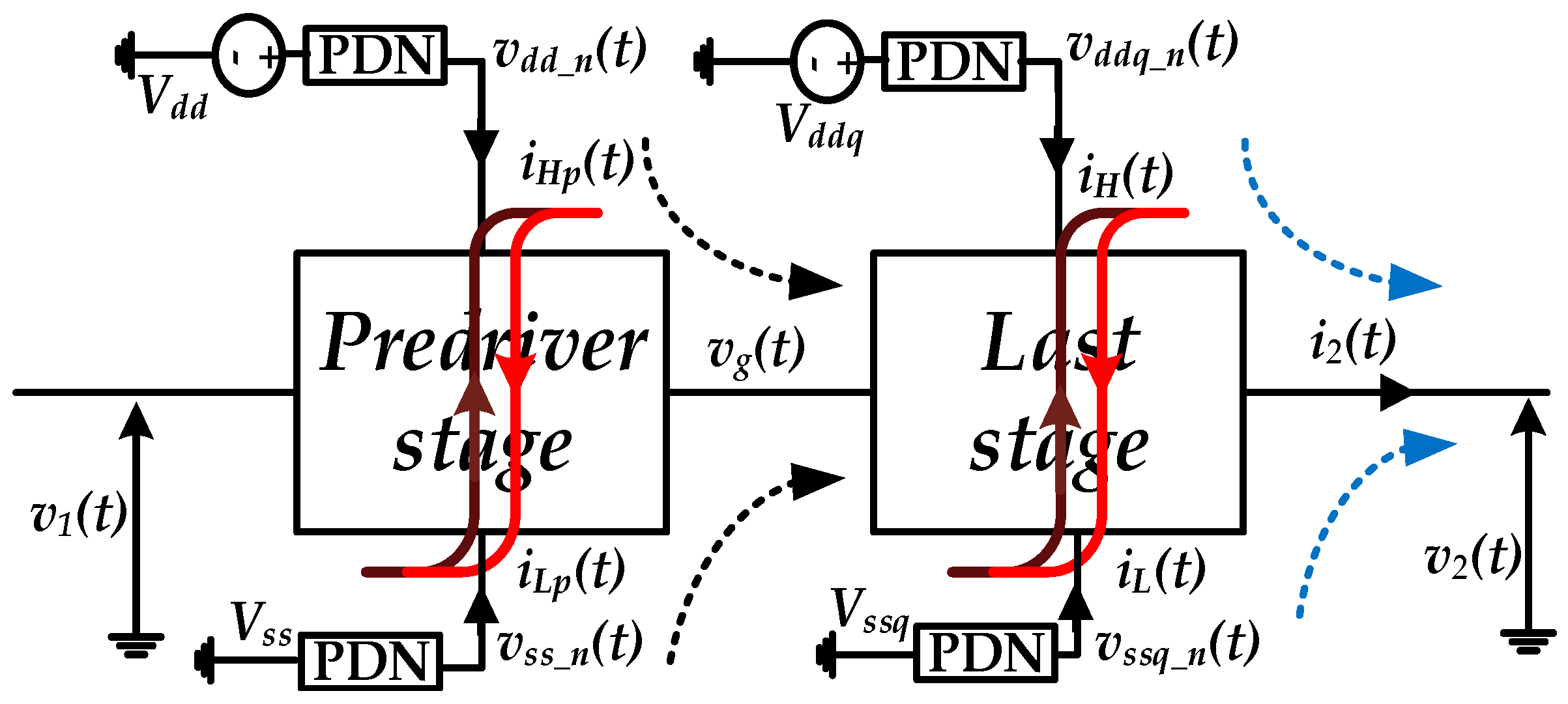
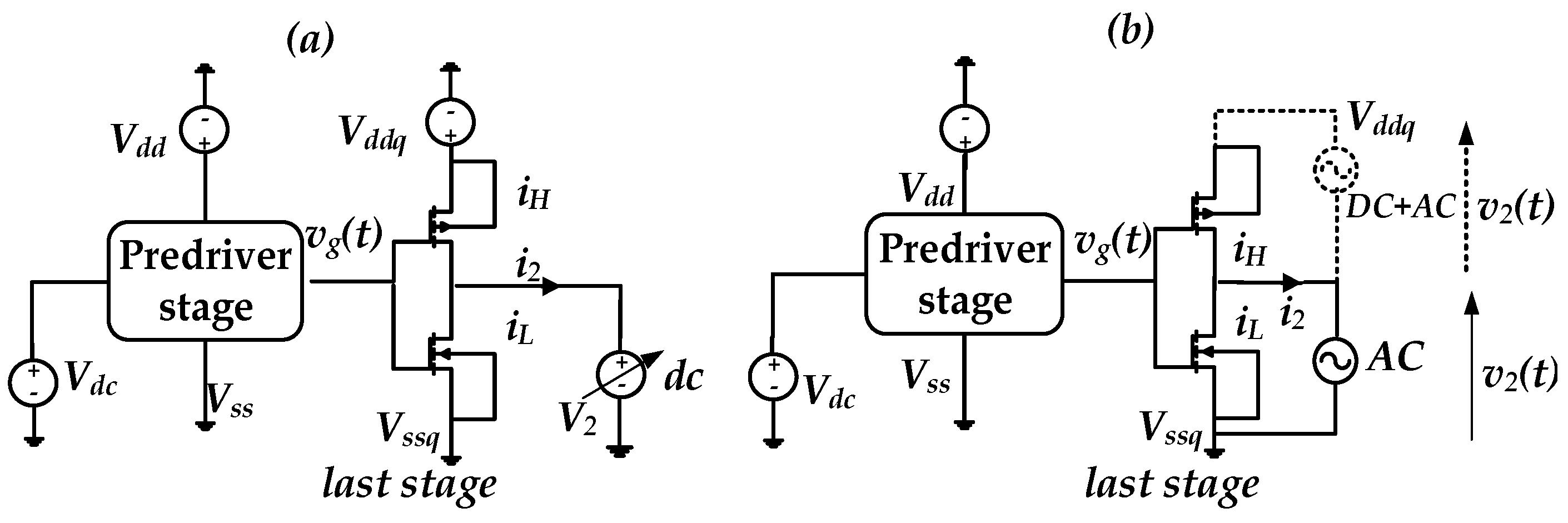
2. Problem Formulation
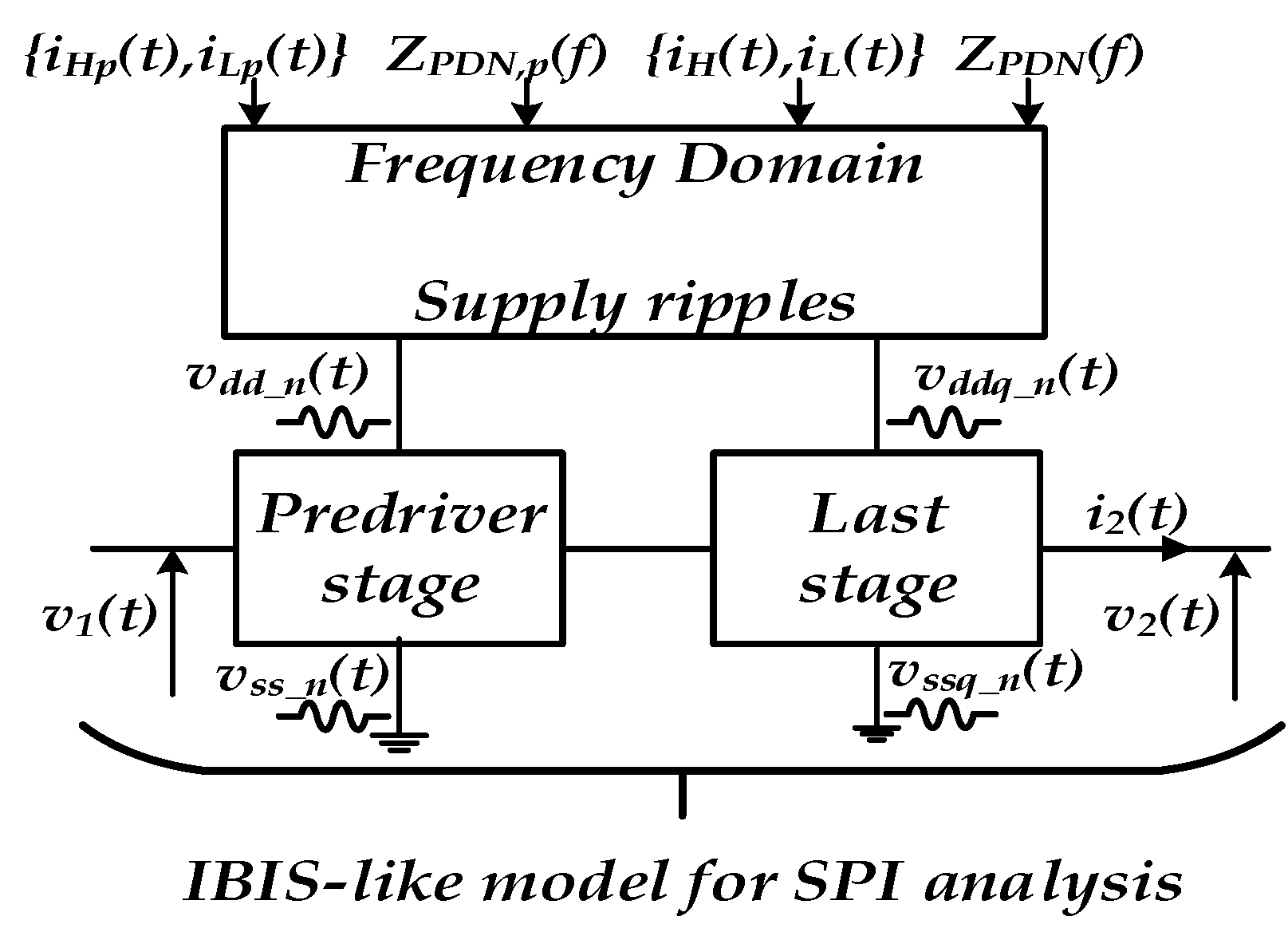
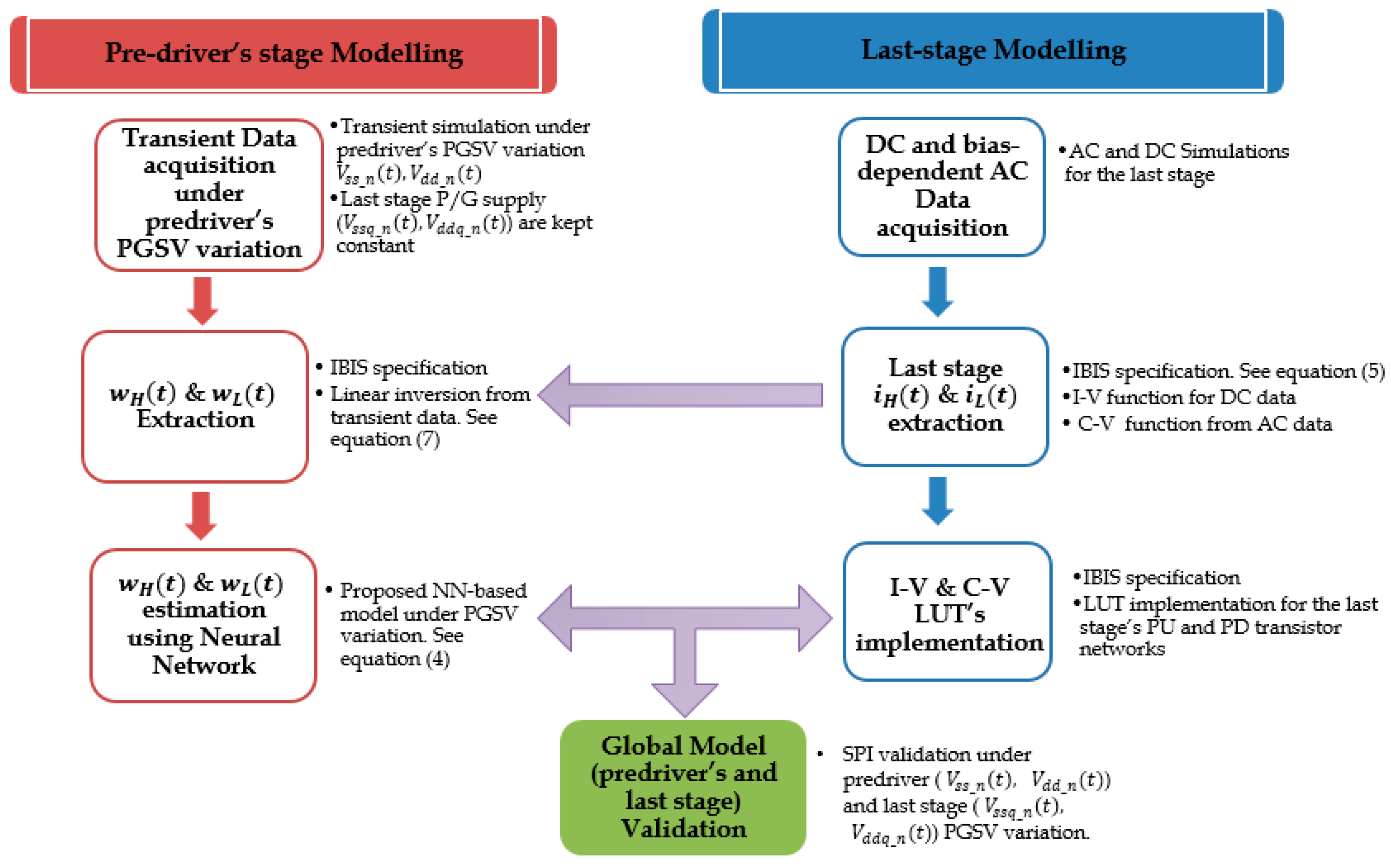
3. Proposed Modelling Methodology
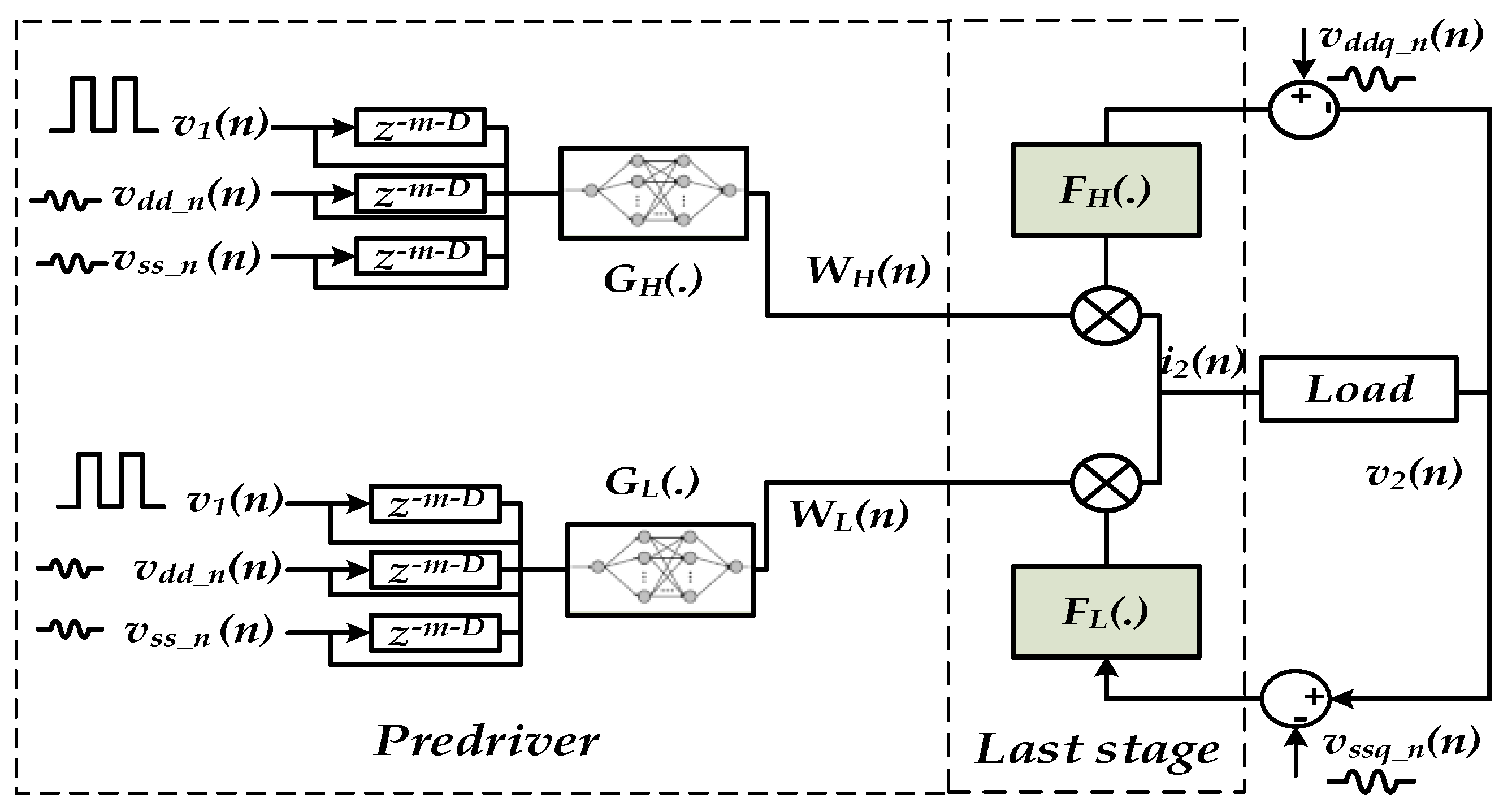
3.1. Model Structure
3.2. Last Stage Modelling
3.3. Predriver Modelling
4. Model Implementation and Validation Results
4.1. Predriver Model Validation
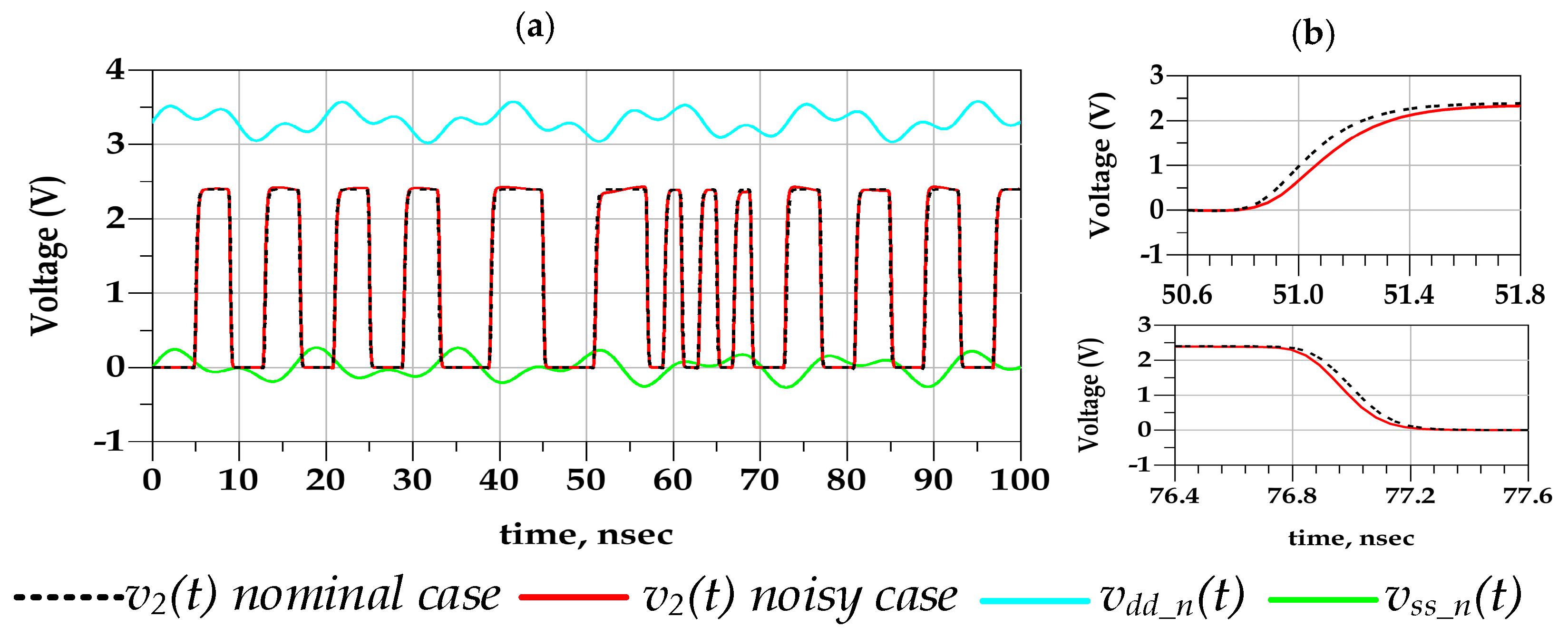
4.2. Global Model Validation under PGSV Variations at the Predriver and Last-Stage
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Fan, J.; Ye, X.; Kim, J.; Archambeault, B.; Orlandi, A. Signal integrity design for high-speed digital circuits: Progress and directions. IEEE Trans. Electromagn. Compat. 2010, 52, 392–400. [Google Scholar] [CrossRef]
- Oh, D.; Shim, Y. Power integrity analysis for core timing models. In Proceedings of the 2014 IEEE International Symposium on Electromagnetic Compatibility (EMC), Raleigh, NC, USA, 4–8 August 2014; pp. 833–838. [Google Scholar]
- Gupta, S. 3-T (8-T) Decoupling Capacitors for Improved PDN in LPDDR4/4X/5 System. In Proceedings of the 2019 IEEE 69th Electronic Components and Technology Conference (ECTC), Las Vegas, NV, USA, 28–31 May 2019; pp. 2097–2102. [Google Scholar]
- Dghais, W.; Souilem, M.; Zayer, F.; Chaari, A. Power Supply and Temperature Aware I/O Buffer Model for Signal-Power Integrity Simulation. Math. Probl. Eng. J. 2018, 2018, 1–9. [Google Scholar] [CrossRef]
- Yu, H.; Michalka, T.; Larbi, M.; Swaminathan, M. Behavioral Modeling of Tunable I/O Drivers with Preemphasis Including Power Supply Noise. IEEE Trans. Very Large Scale Integr. VLSI Syst. 2020, 28, 233–242. [Google Scholar] [CrossRef]
- Canavero, F.G.; Maio, I.A.; Stievano, I.S. M[pi]log, macromodeling via parametric identification of logic gates. IEEE Trans. Adv. Packag. 2004, 27, 15–23. [Google Scholar]
- Signorini, G.; Siviero, C.; Grivet-Talocia, S.; Stievano, I.S. Power and Signal Integrity co-simulation via compressed macromodels of high-speed transceivers. In Proceedings of the 2015 IEEE 18th Workshop on Signal and Power Integrity (SPI), Berlin, Germany, 10–13 May 2015. [Google Scholar]
- Oh, D. System level jitter characterization of high speed I/O systems. In Proceedings of the IEEE International Symposium on Electromagnetic Compatibility, Pittsburgh, PA, USA, 6–10 August 2012; pp. 173–178. [Google Scholar]
- Lan, H.; Schmitt, R.; Yuan, C. Prediction and measurement of supply noise induced jitter in high-speed induced jitter in high-speed I/O interfaces. In Proceedings of the DesignCon, Santa Clara, CA, USA, 2–5 February 2009. [Google Scholar]
- I/O Buffer Information Specification; Version 7; IBIS Open Forum: Boston, MA, USA, 2019; Available online: https://ibis.org/ver7.0/ver7_0.pdf (accessed on 1 September 2021).
- Varma, A.K.; Steer, M.; Franzon, P.D. Improving Behavioral IO Buffer Modeling Based on IBIS. IEEE Trans. Adv. Packag. 2008, 31, 711–721. [Google Scholar] [CrossRef]
- Dghais, W.; Rodriguez, J. New Multiport I/O Model for Power-Aware Signal Integrity Analysis. IEEE Trans. Compon. Packag. Manuf. Technol 2016, 6, 447–454. [Google Scholar] [CrossRef]
- Sandler, S.; Bogatin, E.; LeCroy, T.; Smith, L. Power Distribution Network (PDN) Impedance and Target Impedance. In Proceedings of the Electronic Design Innovation Conference and Exhibition, Santa Clara, CA, USA, 17–19 October 2018. [Google Scholar]
- LSmith, L.D.; Bogatin, E. Principles of Power Integrity for PDN Design—Simplified: Robust and Cost Effective Design for High-Speed Digital Products; Prentice Hall: Hoboken, NJ, USA, 2017. [Google Scholar]
- Sun, S.; Smith, L.D.; Boyle, P. On-Chip PDN Noise Characterization and Modeling. In Proceedings of the DesignCon, Santa Clara, CA, USA, 1–4 February 2010. [Google Scholar]
- Smith, L.; Sun, S.; Boyle, P.; Krsnik, B. System power distribution network theory and performance with various noise current stimuli including impacts on chip level timing. In Proceedings of the Custom Integrated Circuits Conference, San Jose, CA, USA, 13–16 September 2009. [Google Scholar]
- Zhang, Q.J.; Zhang, L. Neural Network Techniques for High-Speed Electronic Component Modeling. In Proceedings of the 2009 IEEE MTT-S International Microwave Workshop Series on Signal Integrity and High-Speed Interconnects, Guadalajara, Mexico, 19–20 February2009; pp. 69–72. [Google Scholar] [CrossRef]
- Cao, Y.; Erdin, I.; Zhang, Q.J. Transient Behavioral Modeling of Nonlinear I/O Drivers Combining Neural Networks and Equivalent Circuits. IEEE Microw. Wirel. Compon. Lett. 2010, 20, 645–647. [Google Scholar] [CrossRef]
- Chu, X.; Hwang, C.; Fan, J.; Li, Y. Analytic Calculation of Jitter Induced by Power and Ground Noise Based on IBIS I/V Curve. IEEE Trans. Electromagn. Compat. 2018, 60, 468–477. [Google Scholar] [CrossRef]
- Souilem, M.; Tripathi, J.N.; Dghais, W.; Belgacem, H. An IBIS-like Modelling for Power/Ground Noise Induced Jitter under Simultaneous Switching Outputs (SSO). In Proceedings of the 2019 IEEE 23rd Workshop on Signal and Power Integrity (SPI), Chambéry, France, 18–21 June 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 1–4. [Google Scholar]























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values |
|---|---|
| Ts: sampling time (ps) | 8 |
| m (ps) | 3.Ts |
| D (ps) | 150.Ts |
| Training epochs | 200 |
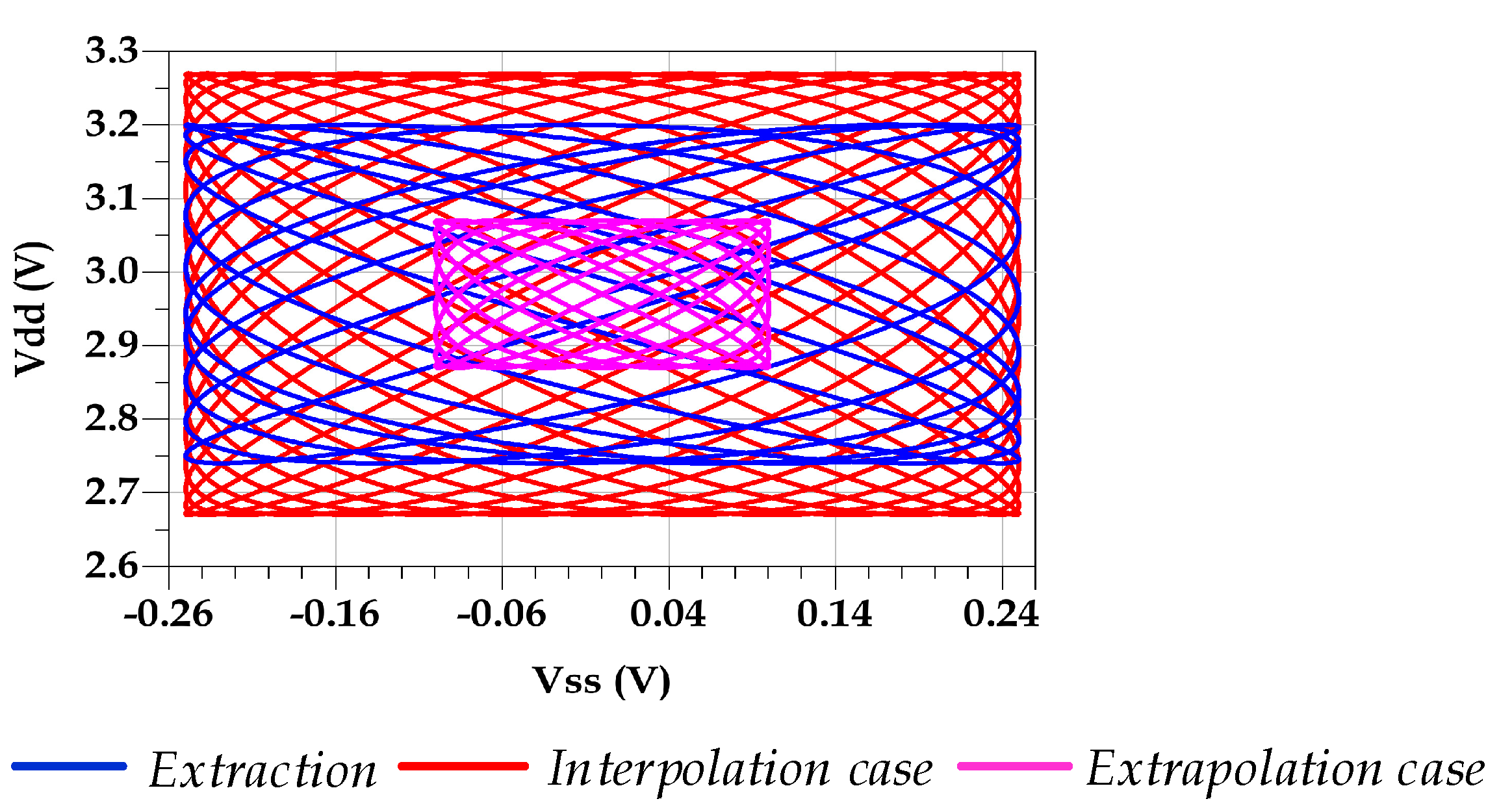
| Parameters | Test Case 1 | Test Case 2 |
|---|---|---|
| (V) | 0.1 | 0.3 |
| (MHz) | 90 | 75 |
| (V) | 0.1 | 0.25 |
| (MHz) | 80 | 80 |
| TL Circuit | NN Model | IBIS-Like Model | |
|---|---|---|---|
| Eye jitter (p2p) (ps) | 203.99 | 212.86 | 35.48 |
| Eye width (ps) | 1835.92 | 1898.01 | 1995.56 |
| Eye height (V) | 2.58 | 2.59 | 2.62 |
| TL Circuit | NN Model | |
|---|---|---|
| Eye jitter (p2p) (ps) | 461.19 | 415.60 |
| Eye width (ps) | 1543.23 | 1617.23 |
| Eye height (V) | 2.54 | 2.53 |
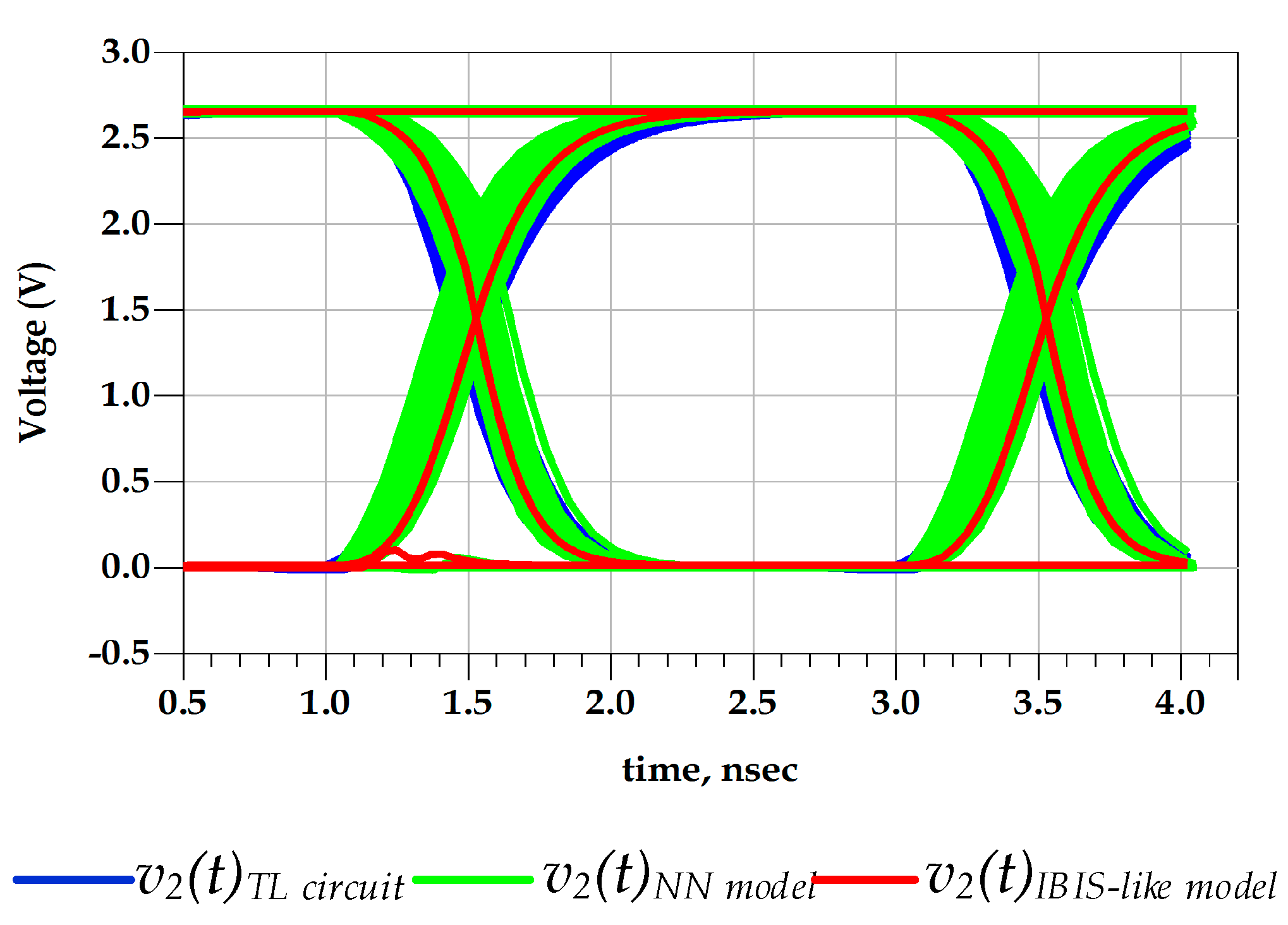
| TL Circuit | NN Model | IBIS-Like | |
|---|---|---|---|
| Eye jitter (p2p) (ps) | 219.72 | 198.12 | 168.51 |
| Eye width (ps) | 1809.31 | 1862.53 | 1942.35 |
| Eye height (V) | 2.31 | 2.34 | 2.38 |
| TL Circuit | NN Model | IBIS-Like | |
|---|---|---|---|
| Eye jitter (p2p) (ps) | 84.62 | 90.82 | 45.41 |
| Eye width (ps) | 1341.04 | 1336.35 | 1381.77 |
| Eye height (V) | 1.15 | 1.16 | 1.182 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Souilem, M.; Tripathi, J.N.; Melicio, R.; Dghais, W.; Belgacem, H.; Rodrigues, E.M.G. Neural-Network Based Modeling of I/O Buffer Predriver under Power/Ground Supply Voltage Variations. Sensors 2021, 21, 6074. https://doi.org/10.3390/s21186074
Souilem M, Tripathi JN, Melicio R, Dghais W, Belgacem H, Rodrigues EMG. Neural-Network Based Modeling of I/O Buffer Predriver under Power/Ground Supply Voltage Variations. Sensors. 2021; 21(18):6074. https://doi.org/10.3390/s21186074
Chicago/Turabian StyleSouilem, Malek, Jai Narayan Tripathi, Rui Melicio, Wael Dghais, Hamdi Belgacem, and Eduardo M. G. Rodrigues. 2021. "Neural-Network Based Modeling of I/O Buffer Predriver under Power/Ground Supply Voltage Variations" Sensors 21, no. 18: 6074. https://doi.org/10.3390/s21186074
APA StyleSouilem, M., Tripathi, J. N., Melicio, R., Dghais, W., Belgacem, H., & Rodrigues, E. M. G. (2021). Neural-Network Based Modeling of I/O Buffer Predriver under Power/Ground Supply Voltage Variations. Sensors, 21(18), 6074. https://doi.org/10.3390/s21186074