
Use of Pressure-Measuring Insoles to Characterize Gait Parameters in Simulated Reduced-Gravity Conditions

 ,
,  and
and 
Abstract
:1. Introduction
2. Materials and Methods
2.1. Participants
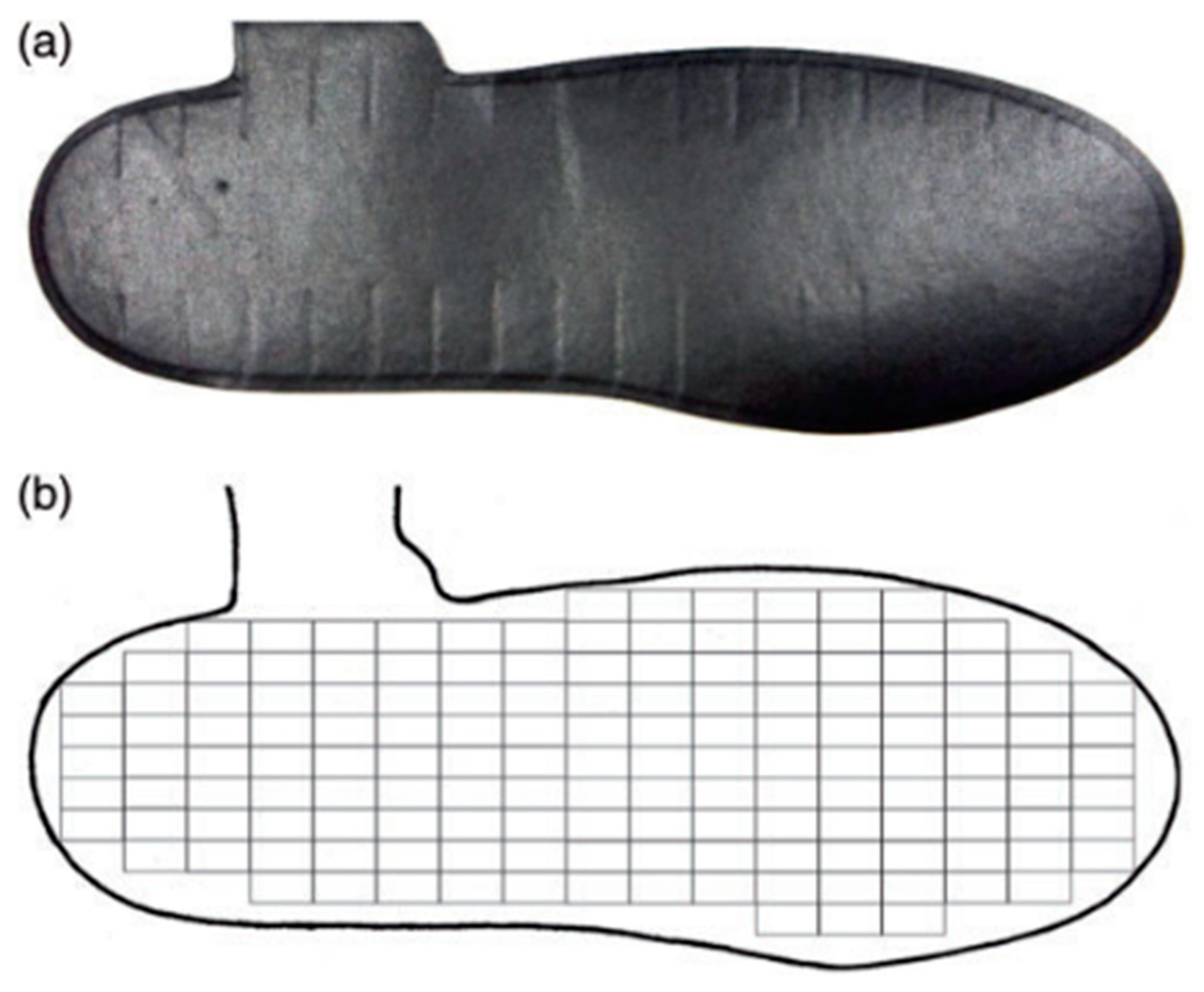
2.2. Instrumentation
2.3. Procedures
- Seated participants were instructed to lift both feet approximately 1–2 inches above the floor.
- Participants were instructed to stand quietly on the floor with weight equally distributed between the two limbs for a period of 15 s.
- Participants were instructed again to sit down and lift both feet approximately 1–2 inches above the ground.
2.4. Plantar Pressure Analysis
2.5. Statistical Analysis
3. Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Acknowledgments
Conflicts of Interest
References
- Kohzuki, M.; Miura, M.; Ito, O.; Nagasaka, M. Acute and Chronic Effects of Lower Body Positive Pressure Exercise on the Very Elderly: A Pilot Study. Int. J. Phys. Med. Rehabil. 2013, 1, 1–5. [Google Scholar] [CrossRef] [Green Version]
- Lazaro, R. Effects of Lower Body Positive Pressure Treadmill Training on Balance, Mobility and Lower Extremity Strength of Community-Dwelling Older Adults: A Pilot Study. J. Allied Health 2020, 49, e99–e103. [Google Scholar] [PubMed]
- Donelan, J.M.; Kram, R. The effect of reduced gravity on the kinematics of human walking: A test of the dynamic similarity hypothesis for locomotion. J. Exp. Biol. 1997, 200, 3193–3201. [Google Scholar] [CrossRef]
- Saxena, A.; Granot, A. Use of an Anti-gravity Treadmill in the Rehabilitation of the Operated Achilles Tendon: A Pilot Study. J. Foot Ankle Surg. 2011, 50, 558–561. [Google Scholar] [CrossRef]
- De Witt, J.K.; Perusek, G.P.; Lewandowski, B.E.; Gilkey, K.M.; Savina, M.C.; Samorezov, S.; Edwards, W.B. Locomotion in simulated and real microgravity: Horizontal suspension vs. parabolic flight. Aviat. Space Environ. Med. 2010, 81, 1092–1099. [Google Scholar] [CrossRef]
- Kawae, T.; Mikami, Y.; Fukuhara, K.; Kimura, H.; Adachi, N. Anti-gravity treadmill can promote aerobic exercise for lower limb osteoarthritis patients. J. Phys. Ther. Sci. 2017, 29, 1444–1448. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Peeler, J.; Takacs, J.; Leiter, J. Novel application of lower body positive-pressure in the rehabilitation of an individual with multiple lower extremity fractures. J. Rehabil. Med. 2011, 43, 653–656. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Raffalt, P.C.; Hovgaard-Hansen, L.; Jensen, B.R. Running on a Lower-Body Positive Pressure Treadmill: VO2max, Respiratory Response, and Vertical Ground Reaction Force. Res. Q. Exerc. Sport 2013, 84, 213–222. [Google Scholar] [CrossRef] [PubMed]
- Patil, S.; Steklov, N.; Bugbee, W.D.; Goldberg, T.; Colwell, C.W.; D’Lima, D.D. Anti-gravity treadmills are effective in reducing knee forces. J. Orthop. Res. 2012, 31, 672–679. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Albertsen, I.M.; Ghédira, M.; Gracies, J.-M.; Hutin, É. Postural stability in young healthy subjects–Impact of reduced base of support, visual deprivation, dual tasking. J. Electromyogr. Kinesiol. 2017, 33, 27–33. [Google Scholar] [CrossRef]
- Kristiansen, M.; Odderskær, N.; Kristensen, D.H. Effect of body weight support on muscle activation during walking on a lower body positive pressure treadmill. J. Electromyogr. Kinesiol. 2019, 48, 9–16. [Google Scholar] [CrossRef]
- Long, L.H.-; Cross, K.; Magrum, E.; Feger, M.; Hertel, J. The effect of body weight reduction using a lower body positive pressure treadmill on plantar pressure measures while running. Phys. Ther. Sport 2020, 43, 100–107. [Google Scholar] [CrossRef] [PubMed]
- Barnes, K.R.; Janecke, J.N. Physiological and Biomechanical Responses of Highly Trained Distance Runners to Lower-Body Positive Pressure Treadmill Running. Sports Med. Open 2017, 3, 41. [Google Scholar] [CrossRef] [Green Version]
- Everett, M.E.; O’Connor, D.P.; DeWitt, J.K. Lower limb position during treadmill jogging and fast running in microgravity. Aviat. Space Environ. Med. 2009, 80, 882–886. [Google Scholar] [CrossRef] [PubMed]
- Gosseye, T.P.; Willems, P.A.; Heglund, N.C. Biomechanical analysis of running in weightlessness on a treadmill equipped with a subject loading system. Graefe’s Arch. Clin. Exp. Ophthalmol. 2010, 110, 709–728. [Google Scholar] [CrossRef] [PubMed]
- Schaffner, G.; Dewitt, J.; Bentley, J.R.; Yarmanova, E.; Kozlovskaya, I.B.; Hagan, D. Effect of Load Levels of Subject Loading Device on Gait, Ground Reaction Force, and Kinematics during Human Treadmill Locomotion in a Weightless Environment; National Aeronautics and Space Administration, Johnson Space Center: Houston, TX, USA, 2005.
- Sylos-Labini, F.; Ivanenko, Y.P.; Cappellini, G.; Portone, A.; MacLellan, M.J.; Lacquaniti, F. Changes of Gait Kinematics in Different Simulators of Reduced Gravity. J. Mot. Behav. 2013, 45, 495–505. [Google Scholar] [CrossRef]
- Li, B.; Xiang, Q.; Zhang, X. The center of pressure progression characterizes the dynamic function of high-arched feet during walking. J. Leather Sci. Eng. 2020, 2, 1–10. [Google Scholar] [CrossRef]
- DeBerardinis, J.; Neilsen, C.; E Lidstone, D.; Dufek, J.S.; Trabia, M.B. A comparison of two techniques for center of pressure measurements. J. Rehabil. Assist. Technol. Eng. 2020, 7, 205566832092106. [Google Scholar] [CrossRef]
- Xiu, W.; Ruble, K.; Ma, O. A reduced-gravity simulator for physically simulating human walking in microgravity or reduced-gravity environment. In Proceedings of the 2014 IEEE International Conference on Robotics and Automation (ICRA), IEEE, Hong Kong, China, 31 May–7 June 2014; pp. 4837–4843. [Google Scholar]
- Lemay, J.-F.; Gagnon, D.H.; Nadeau, S.; Grangeon, M.; Gauthier, C.; Duclos, C. Center-of-pressure total trajectory length is a complementary measure to maximum excursion to better differentiate multidirectional standing limits of stability between individuals with incomplete spinal cord injury and able-bodied individuals. J. Neuroeng. Rehabil. 2014, 11, 8. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Tahir, A.M.; Chowdhury, M.E.H.; Khandakar, A.; Al-Hamouz, S.; Abdalla, M.; Awadallah, S.; Reaz, M.B.I.; Al-Emadi, N. A Systematic Approach to the Design and Characterization of a Smart Insole for Detecting Vertical Ground Reaction Force (vGRF) in Gait Analysis. Sensors 2020, 20, 957. [Google Scholar] [CrossRef] [Green Version]
- Villa-Parra, A.C.; Lima, J.; Delisle-Rodriguez, D.; Vargas-Valencia, L.; Neto, A.F.; Bastos, T. Assessment of an Assistive Control Approach Applied in an Active Knee Orthosis Plus Walker for Post-Stroke Gait Rehabilitation. Sensors 2020, 20, 2452. [Google Scholar] [CrossRef]
- Winter, D.A. Camera speeds for normal and pathological gait analyses. Med. Biol. Eng. Comput. 1982, 20, 408–412. [Google Scholar] [CrossRef]
- Frequently Asked Questions–Service. AlterG. Available online: https://www.alterg.com/service-faq (accessed on 9 October 2020).
- Noraxon, Medilogic Wireless Foot Pressure Measurement System. Available online: https://www.noraxon.com/products/pressure-and-force-measurement-technology/medilogic-insoles/ (accessed on 25 September 2017).
- DeBerardinis, J.; Dufek, J.S.; Trabia, M.B.; E Lidstone, D. Assessing the validity of pressure-measuring insoles in quantifying gait variables. J. Rehabil. Assist. Technol. Eng. 2018, 5, 2055668317752088. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Lidstone, D.E.; DeBerardinis, J.; Dufek, J.S.; Trabia, M.B. Electronic measurement of plantar contact area during walking using an adaptive thresholding method for Medilogic® pressure-measuring insoles. Foot 2019, 39, 1–10. [Google Scholar] [CrossRef] [PubMed]
- Ku, P.; Abu Osman, N.; Abas, W.W. The limits of stability and muscle activity in middle-aged adults during static and dynamic stance. J. Biomech. 2016, 49, 3943–3948. [Google Scholar] [CrossRef] [PubMed]
- Schmit, J.M.; Riley, M.A.; Dalvi, A.; Sahay, A.; Shear, P.K.; Shockley, K.D.; Pun, R.Y.K. Deterministic center of pressure patterns characterize postural instability in Parkinson’s disease. Exp. Brain Res. 2005, 168, 357–367. [Google Scholar] [CrossRef]
- Dixit, S.; Maiya, G.A. Diabetic peripheral neuropathy and its evaluation in a clinical scenario: A review. J. Postgrad. Med. 2014, 60, 33–40. [Google Scholar] [CrossRef]
- Hu, X.; Zhao, J.; Peng, D.; Sun, Z.; Qu, X. Estimation of Foot Plantar Center of Pressure Trajectories with Low-Cost Instrumented Insoles Using an Individual-Specific Nonlinear Model. Sensors 2018, 18, 421. [Google Scholar] [CrossRef] [Green Version]
- De Witt, J.K.; Ploutz-Snyder, L.L. Ground reaction forces during treadmill running in microgravity. J. Biomech. 2014, 47, 2339–2347. [Google Scholar] [CrossRef]
- De Witt, J.K.; Schaffner, G.; Ploutz-Snyder, L.L. Bungee force level, stiffness, and variation during treadmill locomotion in simulated microgravity. Aviat. Space Environ. Med. 2014, 85, 449–455. [Google Scholar] [CrossRef]
- Li, X.; Aruin, A.S. Anticipatory postural adjustments in conditions of simulated reduced gravity. Gait Posture 2008, 28, 538–544. [Google Scholar] [CrossRef] [PubMed]
- Labini, F.S.; Lacquaniti, F.; Ivanenko, Y.P. Human Locomotion under Reduced Gravity Conditions: Biomechanical and Neurophysiological Considerations. BioMed Res. Int. 2014, 2014, 1–12. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wert, D.M.; Brach, J.; Perera, S.; Vanswearingen, J.M. Gait Biomechanics, Spatial and Temporal Characteristics, and the Energy Cost of Walking in Older Adults with Impaired Mobility. Phys. Ther. 2010, 90, 977–985. [Google Scholar] [CrossRef] [PubMed]



{kind=link}
{kind=link}
| European Insole Size | Number of Participants | Age (Year) | Mass (kg) | Height (m) | Gender |
|---|---|---|---|---|---|
| 35–36 | 5 | 22.8 ± 3.96 | 53.02 ± 6.15 | 1.53 ± 0.04 | Male (0) Female (5) |
| 37–38 | 7 | 23.1 ± 3.85 | 56.49 ± 8.39 | 1.60 ± 0.05 | Male (0) Female (7) |
| 39–40 | 5 | 26.2 ± 2.59 | 77.04 ± 18.77 | 1.65 ± 0.04 | Male (1) Female (4) |
| 41–42 | 3 | 26.7 ± 3.79 | 79.5 ± 18.19 | 1.74 ± 0.01 | Male (1) Female (2) |
| 43–44 | 4 | 24.5 ± 5.00 | 76.45 ± 15.49 | 1.69 ± 0.06 | Male (4) Female (0) |
| 45–46 | 5 | 26 ± 5.20 | 91.68 ± 14.15 | 1.85 ± 0.06 | Male (5) Female (0) |
| Insole Size | Number of Sensors |
|---|---|
| 35–36 | 93 |
| 37–38 | 107 |
| 39–40 | 116 |
| 41–42 | 130 |
| 43–44 | 151 |
| 45–46 | 162 |
| Gravity Condition | COP Path Length | COP Path Width | Stance Time |
|---|---|---|---|
| 100% BW | 0.626 ± 0.076 | 0.109 ± 0.023 | 0.777 ± 0.071 |
| 40% BW | 0.438 ± 0.223 1 | 0.152 ± 0.037 1 | 0.753 ± 0.096 1 |
| 20% BW | 0.383 ± 0.190 1 | 0.162 ± 0.043 1 | 0.703 ± 0.126 1,2 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ison, C.; Neilsen, C.; DeBerardinis, J.; Trabia, M.B.; Dufek, J.S. Use of Pressure-Measuring Insoles to Characterize Gait Parameters in Simulated Reduced-Gravity Conditions. Sensors 2021, 21, 6244. https://doi.org/10.3390/s21186244
Ison C, Neilsen C, DeBerardinis J, Trabia MB, Dufek JS. Use of Pressure-Measuring Insoles to Characterize Gait Parameters in Simulated Reduced-Gravity Conditions. Sensors. 2021; 21(18):6244. https://doi.org/10.3390/s21186244
Chicago/Turabian StyleIson, Christian, Connor Neilsen, Jessica DeBerardinis, Mohamed B. Trabia, and Janet S. Dufek. 2021. "Use of Pressure-Measuring Insoles to Characterize Gait Parameters in Simulated Reduced-Gravity Conditions" Sensors 21, no. 18: 6244. https://doi.org/10.3390/s21186244
APA StyleIson, C., Neilsen, C., DeBerardinis, J., Trabia, M. B., & Dufek, J. S. (2021). Use of Pressure-Measuring Insoles to Characterize Gait Parameters in Simulated Reduced-Gravity Conditions. Sensors, 21(18), 6244. https://doi.org/10.3390/s21186244