
Effects of Sensor Types and Angular Velocity Computational Methods in Field Measurements of Occupational Upper Arm and Trunk Postures and Movements



Abstract
:1. Introduction

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| References | Sensor Type | Angular Velocity Computational Method | Posture | Type of Work | Publishing Year | Country of Data Collection |
|---|---|---|---|---|---|---|
| [12,31,38,49,50,51,52,53,54,55,56,57,58] | accelerometers only | - | arm, arm and trunk [31,52,54,56,58] | field | 2004–2020 | Sweden, Denmark, Norway, Brazil, North America, Australia |
| [59,60,61,62] | accelerometers only | arm (inclination velocity) | arm | field | 2008–2013 | Norway, USA |
| [13,14,35,46,63,64,65,66,67,68,69,70,71,72,73,74,75,76,77,78,79,80,81,82,83] | accelerometers only | arm (generalized velocity), arm (generalized velocity) and trunk [46,74,75,76,80,82,83] | arm, arm and trunk [46,74,75,76,80,82,83] | field | 2002–2018 | Sweden, Denmark, Brazil |
| [39,84,85,86,87,88] | accelerometers only | - | arm, arm and trunk [88] | simulated | 2001–2015 | Sweden, Brazil, USA |
| [32,89] | accelerometers only | arm (generalized velocity) | arm | simulated | 2013, 2016 | Sweden |
| [90,91,92,93,94] | accelerometers with gyroscopes | - | arm and trunk | field | 2014–2020 | Sweden, France, Italy, Canada, USA |
| [44,45,95,96,97] | accelerometers with gyroscopes | arm (inclination velocity), arm and trunk [44,95] | arm, arm and trunk [44,45,95,97] | field | 2016–2021 | USA |
| [98,99,100,101,102,103,104] | accelerometers with gyroscopes | - | trunk | field | 2007–2018 | Germany |
| [105,106,107,108] | accelerometers with gyroscopes [106,107,108] or magnetometers [105] | - | arm, arm and trunk [106,107,108] | simulated | 2009–2017 | France, USA |
| [37,109,110] | accelerometers with gyroscopes | arm (inclination velocity), trunk [110] | arm | simulated | 2016–2020 | Italy, USA |
| [40] | accelerometers with gyroscopes | arm (generalized velocity) | arm | simulated | 2017 | Sweden |
2. Materials and Methods
2.1. Participants
2.2. Work Tasks
2.3. Measurements
2.4. Data Processing
2.4.1. Inertial Sensor Data
2.4.2. Filtering
2.4.3. Angle Computation
2.4.4. Angular Velocity Computation
2.4.5. Statistical Analysis
3. Results
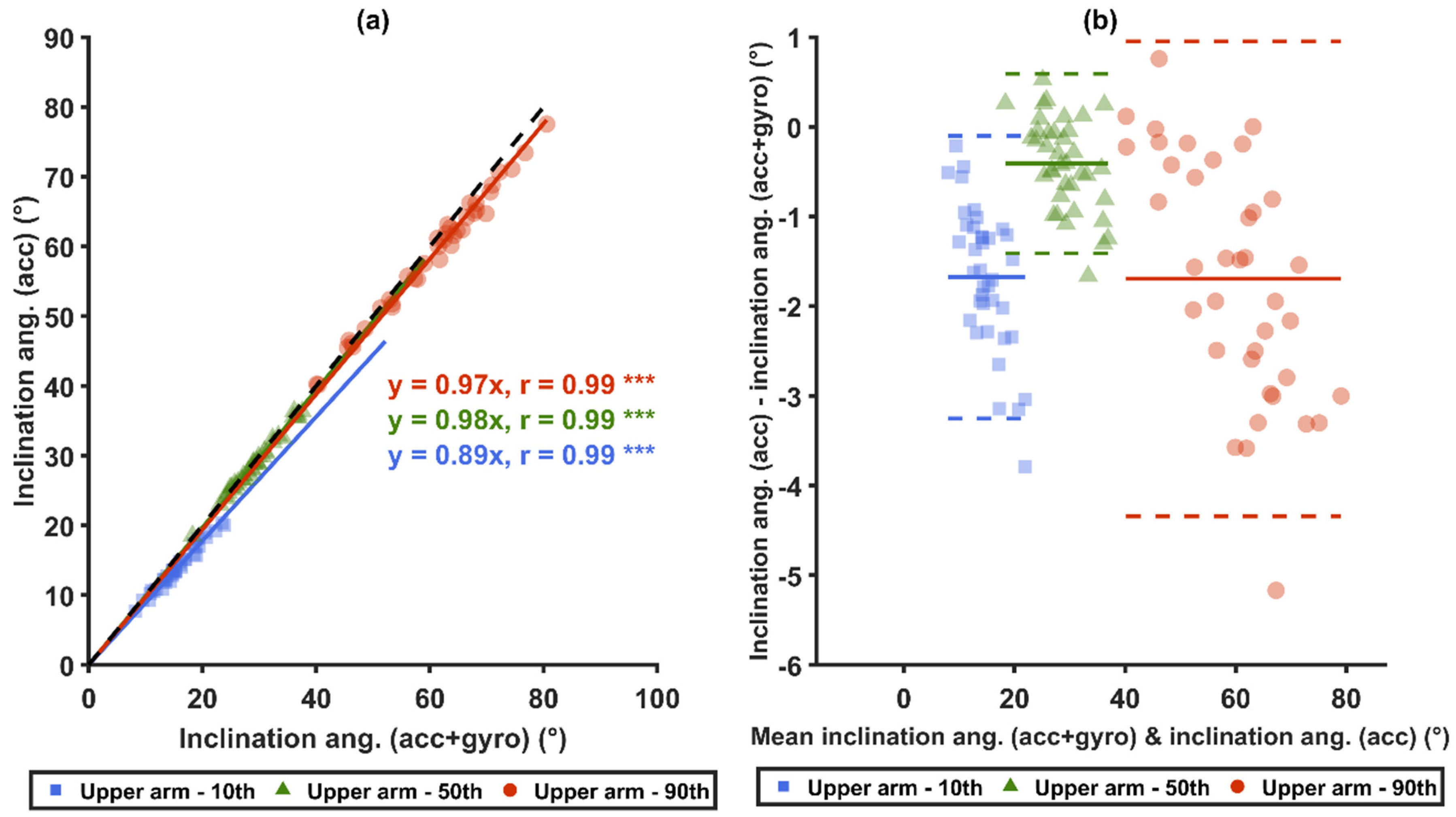
3.1. Comparison of Inclination Angles
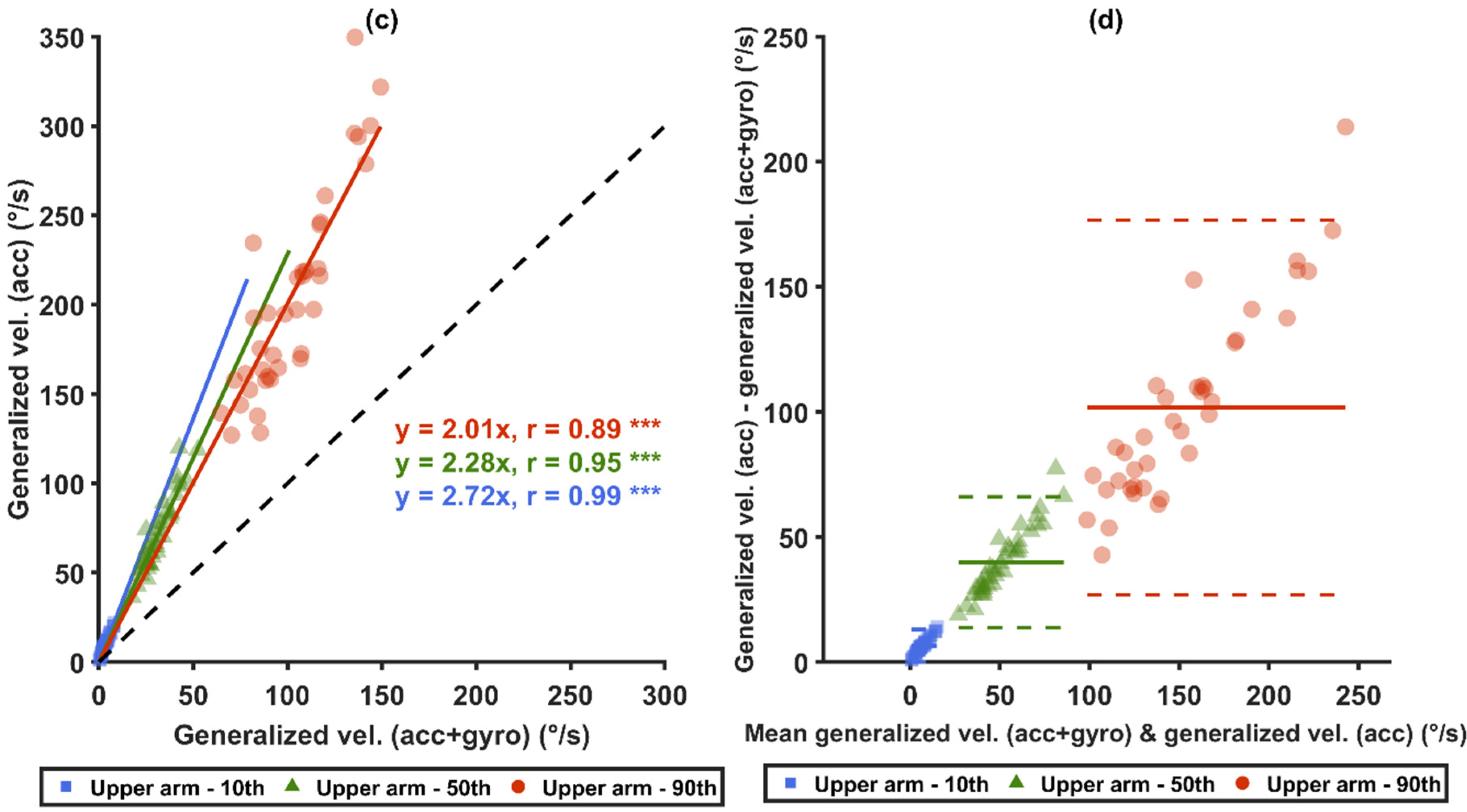
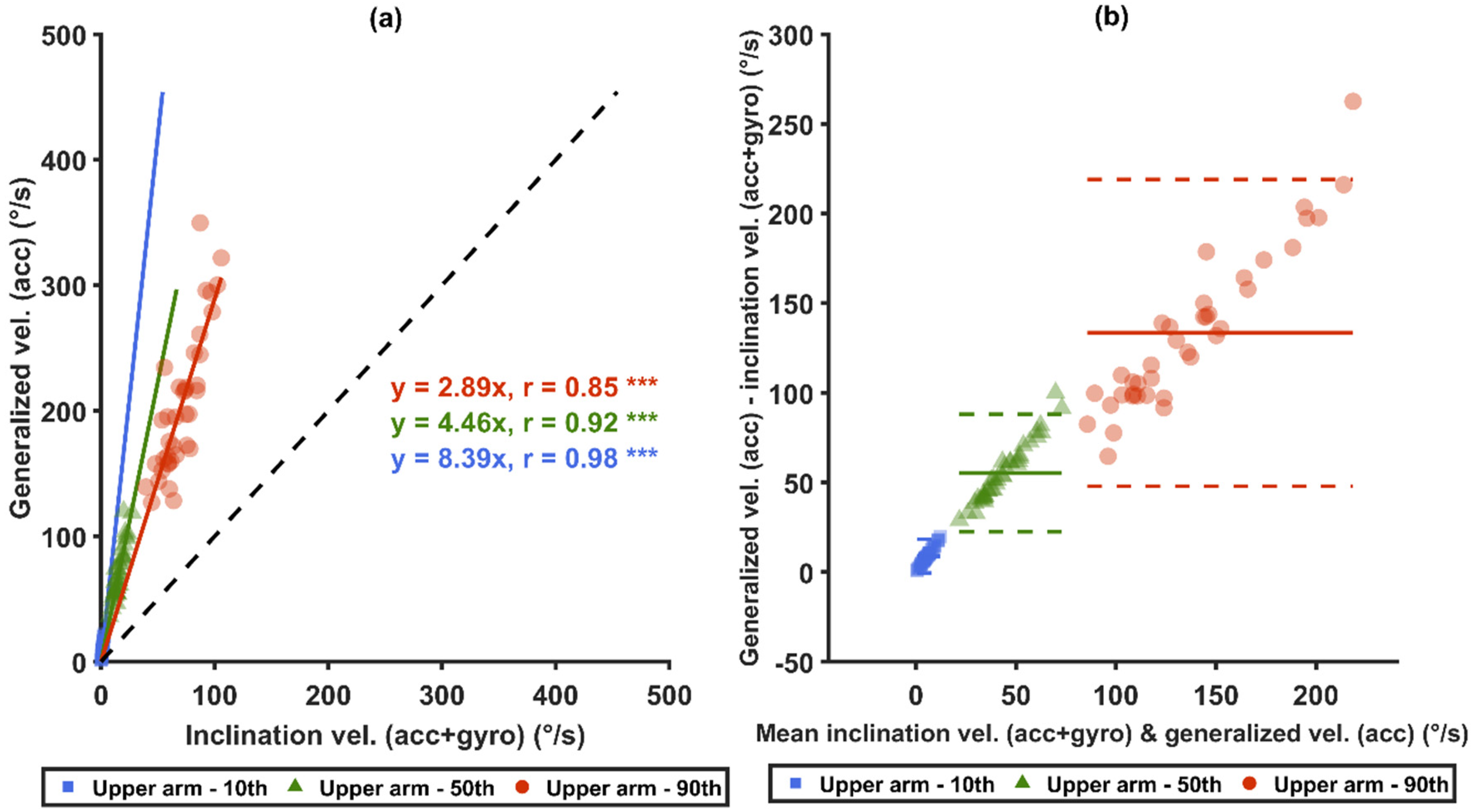
3.2. Comparisons of Angular Velocities
4. Discussion
4.1. Methodological Considerations
4.2. The Effects of Sensor Types: acc Versus acc+gyro
4.3. The Type of Angular Velocity: Generalized Velocity versus Inclination Velocity
4.4. Velocity Conversions
4.5. Practical Implications
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Murray, C.J.L. Global, regional, and national disability-adjusted life-years (DALYs) for 359 diseases and injuries and healthy life expectancy (HALE) for 195 countries and territories, 1990–2017: A systematic analysis for the Global Burden of Disease Study 2017. Lancet 2018, 392, 1859–1922. [Google Scholar] [CrossRef] [Green Version]
- Tompa, E.; Mofidi, A.; van den Heuvel, S.; van Bree, T.; Michaelsen, F.; Jung, Y.; Porsch, L.; van Emmerik, M. The Value of Occupational Safety and Health and the Societal Costs of Work-Related Injuries and Diseases; Publications Office of the European Union: Luxembourg, 2019. [Google Scholar]
- Lotters, F.; Burdorf, A.; Kuiper, J.; Miedema, H. Model for the work-relatedness of low-back pain. Scand. J. Work. Environ. Health 2003, 29, 431–440. [Google Scholar] [CrossRef] [Green Version]
- Van Rijn, R.M.; Huisstede, B.M.; Koes, B.W.; Burdorf, A. Associations between work-related factors and specific disorders of the shoulder--a systematic review of the literature. Scand. J. Work. Environ. Health 2010, 36, 189–201. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Sluiter, J.K.; Rest, K.M.; Frings-Dresen, M.H. Criteria document for evaluating the work-relatedness of upper-extremity musculoskeletal disorders. Scand. J. Work. Environ. Health 2001, 27 (Suppl. S1), 1–102. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- NRC. Musculoskeletal Disorders and the Workplace: Low Back and Upper Extremities; National Research Council and Institute of Medicine: Washington, DC, USA, 2001. [Google Scholar]
- Punnett, L. Musculoskeletal disorders and occupational exposures: How should we judge the evidence concerning the causal association? Scand. J. Public Health 2014, 42, 49–58. [Google Scholar] [CrossRef]
- Hauke, A.; Flintrop, J.; Brun, E.; Rugulies, R. The impact of work-related psychosocial stressors on the onset of musculoskeletal disorders in specific body regions: A review and meta-analysis of 54 longitudinal studies. Work Stress 2011, 25, 243–256. [Google Scholar] [CrossRef]
- Eurofound. Sixth European Working Conditions Survey; Publications Office of the European Union: Luxembourg, 2016. [Google Scholar]
- Van der Molen, H.F.; Foresti, C.; Daams, J.G.; Frings-Dresen, M.H.W.; Kuijer, P. Work-related risk factors for specific shoulder disorders: A systematic review and meta-analysis. Occup. Environ. Med. 2017, 74, 745–755. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Mayer, J.; Kraus, T.; Ochsmann, E. Longitudinal evidence for the association between work-related physical exposures and neck and/or shoulder complaints: A systematic review. Int. Arch. Occup. Environ. Health 2012, 85, 587–603. [Google Scholar] [CrossRef]
- Hanvold, T.N.; Waersted, M.; Mengshoel, A.M.; Bjertness, E.; Veiersted, K.B. Work with prolonged arm elevation as a risk factor for shoulder pain: A longitudinal study among young adults. Appl. Ergon. 2015, 47, 43–51. [Google Scholar] [CrossRef]
- Nordander, C.; Hansson, G.A.; Ohlsson, K.; Arvidsson, I.; Balogh, I.; Stromberg, U.; Rittner, R.; Skerfving, S. Exposure-response relationships for work-related neck and shoulder musculoskeletal disorders—Analyses of pooled uniform data sets. Appl. Ergon. 2016, 55, 70–84. [Google Scholar] [CrossRef]
- Balogh, I.; Arvidsson, I.; Bjork, J.; Hansson, G.A.; Ohlsson, K.; Skerfving, S.; Nordander, C. Work-related neck and upper limb disorders—Quantitative exposure-response relationships adjusted for personal characteristics and psychosocial conditions. BMC Musculoskelet. Disord. 2019, 20, 139. [Google Scholar] [CrossRef] [Green Version]
- Seidler, A.; Euler, U.; Bolm-Audorff, U.; Ellegast, R.; Grifka, J.; Haerting, J.; Jager, M.; Michaelis, M.; Kuss, O. Physical workload and accelerated occurrence of lumbar spine diseases: Risk and rate advancement periods in a German multicenter case-control study. Scand. J. Work. Environ. Health 2011, 37, 30–36. [Google Scholar] [CrossRef] [Green Version]
- Coenen, P.; Kingma, I.; Boot, C.R.; Bongers, P.M.; van Dieen, J.H. Cumulative mechanical low-back load at work is a determinant of low-back pain. Occup. Environ. Med. 2014, 71, 332–337. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Marras, W.S.; Ferguson, S.A.; Lavender, S.A.; Splittstoesser, R.E.; Yang, G. Cumulative spine loading and clinically meaningful declines in low-back function. Hum. Factors 2014, 56, 29–43. [Google Scholar] [CrossRef] [PubMed]
- Norman, R.; Wells, R.; Neumann, P.; Frank, J.; Shannon, H.; Kerr, M. A comparison of peak vs cumulative physical work exposure risk factors for the reporting of low back pain in the automotive industry. Clin. Biomech. 1998, 13, 561–573. [Google Scholar] [CrossRef]
- Davis, K.G.; Marras, W.S. The effects of motion on trunk biomechanics. Clin. Biomech. 2000, 15, 703–717. [Google Scholar] [CrossRef]
- Marras, W.S.; Lavender, S.A.; Leurgans, S.E.; Fathallah, F.A.; Ferguson, S.A.; Allread, W.G.; Rajulu, S.L. Biomechanical risk factors for occupationally related low back disorders. Ergonomics 1995, 38, 377–410. [Google Scholar] [CrossRef] [PubMed]
- Griffith, L.E.; Shannon, H.S.; Wells, R.P.; Walter, S.D.; Cole, D.C.; Cote, P.; Frank, J.; Hogg-Johnson, S.; Langlois, L.E. Individual participant data meta-analysis of mechanical workplace risk factors and low back pain. Am. J. Public Health 2012, 102, 309–318. [Google Scholar] [CrossRef] [PubMed]
- Lunde, L.K.; Koch, M.; Merkus, S.L.; Knardahl, S.; Waersted, M.; Veiersted, K.B. Associations of objectively measured forward bending at work with low-back pain intensity: A 2-year follow-up of construction and healthcare workers. Occup. Environ. Med. 2019, 76, 660–667. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ribeiro, D.C.; Aldabe, D.; Abbott, J.H.; Sole, G.; Milosavljevic, S. Dose-response relationship between work-related cumulative postural exposure and low back pain: A systematic review. Ann. Occup. Hyg. 2012, 56, 684–696. [Google Scholar] [CrossRef] [PubMed]
- Swain, C.T.V.; Pan, F.; Owen, P.J.; Schmidt, H.; Belavy, D.L. No consensus on causality of spine postures or physical exposure and low back pain: A systematic review of systematic reviews. J. Biomech. 2020, 102, 109312. [Google Scholar] [CrossRef]
- Villumsen, M.; Samani, A.; Jorgensen, M.B.; Gupta, N.; Madeleine, P.; Holtermann, A. Are forward bending of the trunk and low back pain associated among Danish blue-collar workers? A cross-sectional field study based on objective measures. Ergonomics 2015, 58, 246–258. [Google Scholar] [CrossRef]
- Takala, E.P.; Pehkonen, I.; Forsman, M.; Hansson, G.A.; Mathiassen, S.E.; Neumann, W.P.; Sjogaard, G.; Veiersted, K.B.; Westgaard, R.H.; Winkel, J. Systematic evaluation of observational methods assessing biomechanical exposures at work. Scand. J. Work. Environ. Health 2010, 36, 3–24. [Google Scholar] [CrossRef] [Green Version]
- Lind, C.M.; Forsman, M.; Rose, L.M. Development and evaluation of RAMP I—A practitioner’s tool for screening of musculoskeletal disorder risk factors in manual handling. Int. J. Occup. Saf. Ergon. 2019, 25, 165–180. [Google Scholar] [CrossRef]
- Lind, C.M.; Forsman, M.; Rose, L.M. Development and evaluation of RAMP II—A practitioner’s tool for assessing musculoskeletal disorder risk factors in industrial manual handling. Ergonomics 2020, 63, 477–504. [Google Scholar] [CrossRef] [Green Version]
- Rhen, I.M.; Forsman, M. Inter- and intra-rater reliability of the OCRA checklist method in video-recorded manual work tasks. Appl. Ergon. 2020, 84, 103025. [Google Scholar] [CrossRef]
- Forsman, M. The search for practical and reliable observational or technical risk assessment methods to be used in prevention of musculoskeletal disorders. Agron. Res. 2017, 15, 680–686. [Google Scholar]
- Trask, C.; Mathiassen, S.E.; Wahlstrom, J.; Forsman, M. Cost-efficient assessment of biomechanical exposure in occupational groups, exemplified by posture observation and inclinometry. Scand. J. Work. Environ. Health 2014, 40, 252–265. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Dahlqvist, C.; Hansson, G.A.; Forsman, M. Validity of a small low-cost triaxial accelerometer with integrated logger for uncomplicated measurements of postures and movements of head, upper back and upper arms. Appl. Ergon. 2016, 55, 108–116. [Google Scholar] [CrossRef] [PubMed]
- Arvidsson, I.; Dahlqvist, C.; Enquist, H.; Nordander, C. Action Levels for Prevention of Work Related Musculoskeletal Disorders; Arbets-och Miljömedicin Syd: Lund, Sweden, 2017. [Google Scholar]
- Hansson, G.A.; Asterland, P.; Holmer, N.G.; Skerfving, S. Validity and reliability of triaxial accelerometers for inclinometry in posture analysis. Med. Biol. Eng. Comput. 2001, 39, 405–413. [Google Scholar] [CrossRef] [PubMed]
- Hansson, G.A.; Arvidsson, I.; Ohlsson, K.; Nordander, C.; Mathiassen, S.E.; Skerfving, S.; Balogh, I. Precision of measurements of physical workload during standardised manual handling. Part II: Inclinometry of head, upper back, neck and upper arms. J. Electromyogr. Kinesiol. 2006, 16, 125–136. [Google Scholar] [CrossRef] [Green Version]
- Amasay, T.; Zodrow, K.; Kincl, L.; Hess, J.; Karduna, A. Validation of tri-axial accelerometer for the calculation of elevation angles. Int. J. Ind. Ergon. 2009, 39, 783–789. [Google Scholar] [CrossRef]
- Chen, H.; Schall, M.C., Jr.; Fethke, N. Accuracy of angular displacements and velocities from inertial-based inclinometers. Appl. Ergon. 2018, 67, 151–161. [Google Scholar] [CrossRef] [PubMed]
- Korshoj, M.; Skotte, J.H.; Christiansen, C.S.; Mortensen, P.; Kristiansen, J.; Hanisch, C.; Ingebrigtsen, J.; Holtermann, A. Validity of the Acti4 software using ActiGraph GT3X+accelerometer for recording of arm and upper body inclination in simulated work tasks. Ergonomics 2014, 57, 247–253. [Google Scholar] [CrossRef] [PubMed]
- Bernmark, E.; Wiktorin, C. A triaxial accelerometer for measuring arm movements. Appl. Ergon. 2002, 33, 541–547. [Google Scholar] [CrossRef]
- Yang, L.; Grooten, W.J.A.; Forsman, M. An iPhone application for upper arm posture and movement measurements. Appl. Ergon. 2017, 65, 492–500. [Google Scholar] [CrossRef]
- Zhu, R.; Zhou, Z. A real-time articulated human motion tracking using tri-axis inertial/magnetic sensors package. IEEE Trans. Neural Syst. Rehabil. Eng. 2004, 12, 295–302. [Google Scholar] [CrossRef]
- Lind, C.M.; Yang, L.; Abtahi, F.; Hanson, L.; Lindecrantz, K.; Lu, K.; Forsman, M.; Eklund, J. Reducing postural load in order picking through a smart workwear system using real-time vibrotactile feedback. Appl. Ergon. 2020, 89, 103188. [Google Scholar] [CrossRef]
- Lind, C.M.; Diaz-Olivares, J.A.; Lindecrantz, K.; Eklund, J. A Wearable Sensor System for Physical Ergonomics Interventions Using Haptic Feedback. Sensors 2020, 20, 6010. [Google Scholar] [CrossRef]
- Schall, M.C., Jr.; Zhang, X.; Chen, H.; Gallagher, S.; Fethke, N.B. Comparing upper arm and trunk kinematics between manufacturing workers performing predominantly cyclic and non-cyclic work tasks. Appl. Ergon. 2021, 93, 103356. [Google Scholar] [CrossRef]
- Granzow, R.F.; Schall, M.C., Jr.; Smidt, M.F.; Chen, H.; Fethke, N.B.; Huangfu, R. Characterizing exposure to physical risk factors among reforestation hand planters in the Southeastern United States. Appl. Ergon. 2018, 66, 1–8. [Google Scholar] [CrossRef]
- Wahlstrom, J.; Bergsten, E.; Trask, C.; Mathiassen, S.E.; Jackson, J.; Forsman, M. Full-Shift Trunk and Upper Arm Postures and Movements Among Aircraft Baggage Handlers. Ann. Occup. Hyg. 2016, 60, 977–990. [Google Scholar] [CrossRef]
- Weber, B.; Douwes, M.; Forsman, M.; Könemann, R.; Heinrich, K.; Enquist, H.; Pinder, A.; Punakallio, A.; Uusitalo, A.; Ditchen, D.; et al. Assessing Arm Elevation at Work with Technical Systems; Partnership for European Research in Occupational Safety and Health (PEROSH): Leiden, The Netherlands, 2017. [Google Scholar]
- Arvidsson, I.; Dahlqvist, C.; Enquist, H.; Nordander, C. Action Levels for the Prevention of Work-Related Musculoskeletal Disorders in the Neck and Upper Extremities: A Proposal. Ann. Work Expo. Health 2021. [Google Scholar] [CrossRef] [PubMed]
- Moriguchi, C.S.; Carnaz, L.; Veiersted, K.B.; Hanvold, T.N.; Haeg, L.B.; Hansson, G.A.; Cote Gil Coury, H.J. Occupational posture exposure among construction electricians. Appl. Ergon. 2013, 44, 86–92. [Google Scholar] [CrossRef]
- Jorgensen, M.B.; Gupta, N.; Korshoj, M.; Lagersted-Olsen, J.; Villumsen, M.; Mortensen, O.S.; Skotte, J.; Sogaard, K.; Madeleine, P.; Samani, A.; et al. The DPhacto cohort: An overview of technically measured physical activity at work and leisure in blue-collar sectors for practitioners and researchers. Appl. Ergon. 2019, 77, 29–39. [Google Scholar] [CrossRef]
- Palm, P.; Gupta, N.; Forsman, M.; Skotte, J.; Nordquist, T.; Holtermann, A. Exposure to Upper Arm Elevation During Work Compared to Leisure Among 12 Different Occupations Measured with Triaxial Accelerometers. Ann. Work Expo. Health 2018, 62, 689–698. [Google Scholar] [CrossRef]
- Holtermann, A.; Fjeldstad Hendriksen, P.; Greby Schmidt, K.; Jagd Svendsen, M.; Norregaard Rasmussen, C.D. Physical Work Demands of Childcare Workers in Denmark: Device-Based Measurements and Workplace Observations Among 199 Childcare Workers from 16 Day Nurseries. Ann. Work Expo. Health 2020, 64, 586–595. [Google Scholar] [CrossRef] [PubMed]
- Wærsted, M.; Enquist, H.; Veiersted, K.B. Hairdressers’ shoulder load when blow-drying—Studying the effect of a new blow dryer design on arm inclination angle and muscle pain. Int. J. Ind. Ergon. 2019, 74, 102839. [Google Scholar] [CrossRef]
- Merkus, S.L.; Lunde, L.K.; Koch, M.; Waersted, M.; Knardahl, S.; Veiersted, K.B. Physical capacity, occupational physical demands, and relative physical strain of older employees in construction and healthcare. Int. Arch. Occup. Environ. Health 2019, 92, 295–307. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Buchholz, B.; Park, J.S.; Gold, J.E.; Punnett, L. Subjective ratings of upper extremity exposures: Inter-method agreement with direct measurement of exposures. Ergonomics 2008, 51, 1064–1077. [Google Scholar] [CrossRef] [PubMed]
- Thamsuwan, O.; Galvin, K.; Tchong-French, M.; Kim, J.H.; Johnson, P.W. A feasibility study comparing objective and subjective field-based physical exposure measurements during apple harvesting with ladders and mobile platforms. J. Agromed. 2019, 24, 268–278. [Google Scholar] [CrossRef] [PubMed]
- Bruno Garza, J.L.; Eijckelhof, B.H.; Johnson, P.W.; Raina, S.M.; Rynell, P.W.; Huysmans, M.A.; van Dieen, J.H.; van der Beek, A.J.; Blatter, B.M.; Dennerlein, J.T. Observed differences in upper extremity forces, muscle efforts, postures, velocities and accelerations across computer activities in a field study of office workers. Ergonomics 2012, 55, 670–681. [Google Scholar] [CrossRef] [Green Version]
- Ciccarelli, M.; Straker, L.; Mathiassen, S.E.; Pollock, C. Posture variation among office workers when using different information and communication technologies at work and away from work. Ergonomics 2014, 57, 1678–1686. [Google Scholar] [CrossRef] [Green Version]
- Veiersted, K.B.; Gould, K.S.; Osteras, N.; Hansson, G.A. Effect of an intervention addressing working technique on the biomechanical load of the neck and shoulders among hairdressers. Appl. Ergon. 2008, 39, 183–190. [Google Scholar] [CrossRef] [PubMed]
- Hess, J.A.; Kincl, L.; Amasay, T.; Wolfe, P. Ergonomic evaluation of masons laying concrete masonry units and autoclaved aerated concrete. Appl. Ergon. 2010, 41, 477–483. [Google Scholar] [CrossRef] [PubMed]
- Douphrate, D.I.; Fethke, N.B.; Nonnenmann, M.W.; Rosecrance, J.C.; Reynolds, S.J. Full shift arm inclinometry among dairy parlor workers: A feasibility study in a challenging work environment. Appl. Ergon. 2012, 43, 604–613. [Google Scholar] [CrossRef]
- Ettinger, L.; Kincl, L.; Johnson, P.; Carter, C.; Garfinkel, S.; Karduna, A. Workday Arm Elevation Exposure: A Comparison Between Two Professions. IIE Trans Occup. 2013, 1, 119–127. [Google Scholar] [CrossRef]
- Arvidsson, I.; Balogh, I.; Hansson, G.A.; Ohlsson, K.; Akesson, I.; Nordander, C. Rationalization in meat cutting—Consequences on physical workload. Appl. Ergon. 2012, 43, 1026–1032. [Google Scholar] [CrossRef] [PubMed]
- Arvidsson, I.; Arvidsson, M.; Axmon, A.; Hansson, G.A.; Johansson, C.R.; Skerfving, S. Musculoskeletal disorders among female and male air traffic controllers performing identical and demanding computer work. Ergonomics 2006, 49, 1052–1067. [Google Scholar] [CrossRef]
- Arvidsson, I.; Hansson, G.A.; Mathiassen, S.E.; Skerfving, S. Changes in physical workload with implementation of mouse-based information technology in air traffic control. Int. J. Ind. Ergon. 2006, 36, 613–622. [Google Scholar] [CrossRef]
- Balogh, I.; Ohlsson, K.; Hansson, G.A.; Engstrom, T.; Skerfving, S. Increasing the degree of automation in a production system: Consequences for the physical workload. Int. J. Ind. Ergon. 2006, 36, 353–365. [Google Scholar] [CrossRef]
- Balogh, I.; Ohlsson, K.; Nordander, C.; Bjork, J.; Hansson, G.A. The importance of work organization on workload and musculoskeletal health—Grocery store work as a model. Appl. Ergon. 2016, 53, 143–151. [Google Scholar] [CrossRef] [Green Version]
- Dahlqvist, C.; Nordander, C.; Forsman, M.; Enquist, H. Self-recordings of upper arm elevation during cleaning—Comparison between analyses using a simplified reference posture and a standard reference posture. BMC Musculoskelet. Disord. 2018, 19, 402. [Google Scholar] [CrossRef] [Green Version]
- Hansson, G.A.; Balogh, I.; Ohlsson, K.; Granqvist, L.; Nordander, C.; Arvidsson, I.; Akesson, I.; Unge, J.; Rittner, R.; Stromberg, U.; et al. Physical workload in various types of work: Part II. Neck, shoulder and upper arm. Int. J. Ind. Ergon. 2010, 40, 267–281. [Google Scholar] [CrossRef]
- Nordander, C.; Ohlsson, K.; Balogh, I.; Hansson, G.A.; Axmon, A.; Persson, R.; Skerfving, S. Gender differences in workers with identical repetitive industrial tasks: Exposure and musculoskeletal disorders. Int. Arch. Occup. Environ. Health 2008, 81, 939–947. [Google Scholar] [CrossRef] [PubMed]
- Jonker, D.; Rolander, B.; Balogh, I. Relation between perceived and measured workload obtained by long-term inclinometry among dentists. Appl. Ergon. 2009, 40, 309–315. [Google Scholar] [CrossRef] [PubMed]
- Jonker, D.; Rolander, B.; Balogh, I.; Sandsjo, L.; Ekberg, K.; Winkel, J. Mechanical exposure among general practice dentists in Sweden and possible implications of rationalisation. Ergonomics 2011, 54, 953–960. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Jonker, D.; Rolander, B.; Balogh, I.; Sandsjo, L.; Ekberg, K.; Winkel, J. Rationalisation in public dental care—Impact on clinical work tasks and mechanical exposure for dentists—A prospective study. Ergonomics 2013, 56, 303–313. [Google Scholar] [CrossRef] [Green Version]
- Moriguchi, C.S.; Carnaz, L.; Alencar, J.F.; Miranda Junior, L.C.; Granqvist, L.; Hansson, G.A.; Gil Coury, H.J. Postures and movements in the most common tasks of power line workers. Ind. Health 2011, 49, 482–491. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Christmansson, M.; Medbo, L.; Hansson, G.A.; Ohlsson, K.; Bystrom, J.U.; Moller, T.; Forsman, M. A case study of a principally new way of materials kitting—An evaluation of time consumption and physical workload. Int. J. Ind. Ergon. 2002, 30, 49–65. [Google Scholar] [CrossRef]
- Bystrom, J.U.; Hansson, G.A.; Rylander, L.; Ohlsson, K.; Kallrot, G.; Skerfving, S. Physical workload on neck and upper limb using two CAD applications. Appl. Ergon. 2002, 33, 63–74. [Google Scholar] [CrossRef]
- Unge, J.; Ohlsson, K.; Nordander, C.; Hansson, G.A.; Skerfving, S.; Balogh, I. Differences in physical workload, psychosocial factors and musculoskeletal disorders between two groups of female hospital cleaners with two diverse organizational models. Int. Arch. Occup. Environ. Health 2007, 81, 209–220. [Google Scholar] [CrossRef] [PubMed]
- Akesson, I.; Balogh, I.; Hansson, G.A. Physical workload in neck, shoulders and wrists/hands in dental hygienists during a work-day. Appl. Ergon. 2012, 43, 803–811. [Google Scholar] [CrossRef]
- Juul-Kristensen, B.; Hansson, G.A.; Fallentin, N.; Andersen, J.H.; Ekdahl, C. Assessment of work postures and movements using a video-based observation method and direct technical measurements. Appl. Ergon. 2001, 32, 517–524. [Google Scholar] [CrossRef]
- Kazmierczak, K.; Mathiassen, S.E.; Forsman, M.; Winkel, J. An integrated analysis of ergonomics and time consumption in Swedish ‘craft-type’ car disassembly. Appl. Ergon. 2005, 36, 263–273. [Google Scholar] [CrossRef]
- Wahlstrom, J.; Mathiassen, S.E.; Liv, P.; Hedlund, P.; Ahlgren, C.; Forsman, M. Upper arm postures and movements in female hairdressers across four full working days. Ann. Occup. Hyg. 2010, 54, 584–594. [Google Scholar] [CrossRef] [Green Version]
- Heiden, M.; Zetterberg, C.; Mathiassen, S.E. Trunk and upper arm postures in paper mill work. Appl. Ergon. 2019, 76, 90–96. [Google Scholar] [CrossRef]
- Heilskov-Hansen, T.; Svendsen, S.W.; Frolund Thomsen, J.; Mikkelsen, S.; Hansson, G.A. Sex differences in task distribution and task exposures among Danish house painters: An observational study combining questionnaire data with biomechanical measurements. PLoS ONE 2014, 9, e110899. [Google Scholar] [CrossRef]
- Moriguchi, C.S.; Carnaz, L.; Miranda Junior, L.C.; Marklin, R.W.; Gil Coury, H.J. Are posture data from simulated tasks representative of field conditions? Case study for overhead electric utility workers. Ergonomics 2012, 55, 1382–1394. [Google Scholar] [CrossRef]
- Jackson, J.A.; Mathiassen, S.E.; Wahlstrom, J.; Liv, P.; Forsman, M. Is what you see what you get? Standard inclinometry of set upper arm elevation angles. Appl. Ergon. 2015, 47, 242–252. [Google Scholar] [CrossRef] [PubMed]
- Acuna, M.; Amasay, T.; Karduna, A.R. The reliability of side to side measurements of upper extremity activity levels in healthy subjects. BMC Musculoskelet. Disord. 2010, 11, 168. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Amasay, T.; Latteri, M.; Karduna, A.R. In vivo measurement of humeral elevation angles and exposure using a triaxial accelerometer. Hum. Factors 2010, 52, 616–626. [Google Scholar] [CrossRef]
- Paquet, V.L.; Punnett, L.; Buchholz, B. Validity of fixed-interval observations for postural assessment in construction work. Appl. Ergon. 2001, 32, 215–224. [Google Scholar] [CrossRef]
- Rislund, C.; Hemphala, H.; Hansson, G.A.; Balogh, I. Evaluation of three principles for forklift steering: Effects on physical workload. Int. J. Ind. Ergon. 2013, 43, 249–256. [Google Scholar] [CrossRef]
- Yu, D.; Dural, C.; Morrow, M.M.B.; Yang, L.; Collins, J.W.; Hallbeck, S.; Kjellman, M.; Forsman, M.; Yu, D. Intraoperative workload in robotic surgery assessed by wearable motion tracking sensors and questionnaires. Surg. Endosc. 2016, 31, 1–10. [Google Scholar] [CrossRef]
- Schall, M.C., Jr.; Fethke, N.B.; Chen, H.; Oyama, S.; Douphrate, D.I. Accuracy and repeatability of an inertial measurement unit system for field-based occupational studies. Ergonomics 2016, 59, 591–602. [Google Scholar] [CrossRef]
- Robert-Lachaine, X.; Larue, C.; Denis, D.; Delisle, A.; Mecheri, H.; Corbeil, P.; Plamondon, A. Feasibility of quantifying the physical exposure of materials handlers in the workplace with magnetic and inertial measurement units. Ergonomics 2020, 63, 283–292. [Google Scholar] [CrossRef] [PubMed]
- Vignais, N.; Bernard, F.; Touvenot, G.; Sagot, J.C. Physical risk factors identification based on body sensor network combined to videotaping. Appl. Ergon. 2017, 65, 410–417. [Google Scholar] [CrossRef]
- Battini, D.; Persona, A.; Sgarbossa, F. Innovative real-time system to integrate ergonomic evaluations into warehouse design and management. Comput. Ind. Eng. 2014, 77, 1–10. [Google Scholar] [CrossRef]
- Fethke, N.B.; Schall, M.C., Jr.; Chen, H.; Branch, C.A.; Merlino, L.A. Biomechanical factors during common agricultural activities: Results of on-farm exposure assessments using direct measurement methods. J. Occup. Environ. Hyg. 2020, 17, 85–96. [Google Scholar] [CrossRef]
- Kersten, J.T.; Fethke, N.B. Radio frequency identification to measure the duration of machine-paced assembly tasks: Agreement with self-reported task duration and application in variance components analyses of upper arm postures and movements recorded over multiple days. Appl. Ergon. 2019, 75, 74–82. [Google Scholar] [CrossRef] [PubMed]
- Schall, M.C., Jr.; Fethke, N.B.; Chen, H. Working postures and physical activity among registered nurses. Appl. Ergon. 2016, 54, 243–250. [Google Scholar] [CrossRef] [PubMed]
- Freitag, S.; Ellegast, R.; Dulon, M.; Nienhaus, A. Quantitative measurement of stressful trunk postures in nursing professions. Ann. Occup. Hyg. 2007, 51, 385–395. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Freitag, S.; Fincke-Junod, I.; Seddouki, R.; Dulon, M.; Hermanns, I.; Kersten, J.F.; Larsson, T.J.; Nienhaus, A. Frequent bending--an underestimated burden in nursing professions. Ann. Occup. Hyg. 2012, 56, 697–707. [Google Scholar] [CrossRef]
- Freitag, S.; Seddouki, R.; Dulon, M.; Kersten, J.F.; Larsson, T.J.; Nienhaus, A. The effect of working position on trunk posture and exertion for routine nursing tasks: An experimental study. Ann. Occup. Hyg. 2014, 58, 317–325. [Google Scholar] [CrossRef] [Green Version]
- Hermanns, I.; Raffler, N.; Ellegast, R.P.; Fischer, S.; Gores, B. Simultaneous field measuring method of vibration and body posture for assessment of seated occupational driving tasks. Int. J. Ind. Ergon. 2008, 38, 255–263. [Google Scholar] [CrossRef]
- Kozak, A.; Freitag, S.; Nienhaus, A. Evaluation of a Training Program to Reduce Stressful Trunk Postures in the Nursing Professions: A Pilot Study. Ann. Work Expo. Health 2017, 61, 22–32. [Google Scholar] [CrossRef] [Green Version]
- Raffler, N.; Ellegast, R.; Kraus, T.; Ochsmann, E. Factors affecting the perception of whole-body vibration of occupational drivers: An analysis of posture and manual materials handling and musculoskeletal disorders. Ergonomics 2016, 59, 48–60. [Google Scholar] [CrossRef]
- Raffler, N.; Rissler, J.; Ellegast, R.; Schikowsky, C.; Kraus, T.; Ochsmann, E. Combined exposures of whole-body vibration and awkward posture: A cross sectional investigation among occupational drivers by means of simultaneous field measurements. Ergonomics 2017, 60, 1564–1575. [Google Scholar] [CrossRef]
- Won, E.J.; Johnson, P.W.; Punnett, L.; Dennerlein, J.T. Upper extremity biomechanics in computer tasks differ by gender. J. Electromyogr. Kinesiol. 2009, 19, 428–436. [Google Scholar] [CrossRef] [PubMed]
- Vignais, N.; Miezal, M.; Bleser, G.; Mura, K.; Gorecky, D.; Marin, F. Innovative system for real-time ergonomic feedback in industrial manufacturing. Appl. Ergon. 2013, 44, 566–574. [Google Scholar] [CrossRef]
- Amari, M.; Caruel, E.; Donati, P. Inter-individual postural variability in seated drivers exposed to whole-body vibration. Ergonomics 2015, 58, 1162–1174. [Google Scholar] [CrossRef]
- Zare, M.; Biau, S.; Brunet, R.; Roquelaure, Y. Comparison of three methods for evaluation of work postures in a truck assembly plant. Ergonomics 2017, 60, 1551–1563. [Google Scholar] [CrossRef]
- Chen, H.; Schall, M.C., Jr.; Fethke, N.B. Measuring upper arm elevation using an inertial measurement unit: An exploration of sensor fusion algorithms and gyroscope models. Appl. Ergon. 2020, 89, 103187. [Google Scholar] [CrossRef] [PubMed]
- Peppoloni, L.; Filippeschi, A.; Ruffaldi, E.; Avizzano, C.A. (WMSDs issue) A novel wearable system for the online assessment of risk for biomechanical load in repetitive efforts. Int. J. Ind. Ergon. 2016, 52, 1–11. [Google Scholar] [CrossRef]
- Ahlstrom, L.; Grimby-Ekman, A.; Hagberg, M.; Dellve, L. The work ability index and single-item question: Associations with sick leave, symptoms, and health--a prospective study of women on long-term sick leave. Scand. J. Work. Environ. Health 2010, 36, 404–412. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Godinho, C.; Domingos, J.; Cunha, G.; Santos, A.T.; Fernandes, R.M.; Abreu, D.; Goncalves, N.; Matthews, H.; Isaacs, T.; Duffen, J.; et al. A systematic review of the characteristics and validity of monitoring technologies to assess Parkinson’s disease. J. Neuroeng. Rehabil. 2016, 13, 24. [Google Scholar] [CrossRef] [Green Version]
- Schmal, H.; Holsgaard-Larsen, A.; Izadpanah, K.; Brond, J.C.; Madsen, C.F.; Lauritsen, J. Validation of Activity Tracking Procedures in Elderly Patients after Operative Treatment of Proximal Femur Fractures. Rehabil. Res. Pract. 2018, 2018, 3521271. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Skotte, J.; Korshoj, M.; Kristiansen, J.; Hanisch, C.; Holtermann, A. Detection of physical activity types using triaxial accelerometers. J. Phys. Act Health 2014, 11, 76–84. [Google Scholar] [CrossRef]
- Downie, F.; Gannon, R. OPSITE Flexifix Gentle: Preventing breakdown in vulnerable skin. Br. J. Nurs. 2013, 22, 696, 698–700. [Google Scholar] [CrossRef]
- Blanca, M.J.; Alarcon, R.; Arnau, J.; Bono, R.; Bendayan, R. Non-normal data: Is ANOVA still a valid option? Psicothema 2017, 29, 552–557. [Google Scholar] [CrossRef] [PubMed]
- SCB. The Swedish Occupational Register with Statistics 2018; Statistics Sweden: Örebro, Sweden, 2020. [Google Scholar]
- Yang, L.; Borgström, D.; Forsman, M. Validation and Comparison of Three Positioning Protocols of Inertial Measurement Units for Measuring Trunk Movement. In Proceedings of the the 20th Congress of the International Ergonomics Association (IEA 2018), Florence, Italy, 26–30 August 2018; pp. 205–211. [Google Scholar]
- Peters, A.; Galna, B.; Sangeux, M.; Morris, M.; Baker, R. Quantification of soft tissue artifact in lower limb human motion analysis: A systematic review. Gait Posture 2010, 31, 1–8. [Google Scholar] [CrossRef] [PubMed]
- Leardini, A.; Chiari, L.; Della Croce, U.; Cappozzo, A. Human movement analysis using stereophotogrammetry. Part 3. Soft tissue artifact assessment and compensation. Gait Posture 2005, 21, 212–225. [Google Scholar] [CrossRef] [PubMed]












| Characteristics | Statistics |
|---|---|
| Male, count (%) | 25 (66%) |
| Age, mean (standard deviation, SD) | 25 (8) years |
| Body mass, mean (SD) | 76 (11) kg |
| Statue, mean (SD) | 178 (8) cm |
| Work experience, (%) | |
| <1 year | 29% |
| 1–2 years | 20% |
| 3–5 years | 43% |
| >10 years | 9% |
| Self-rated work ability, mean (SD) | 8.6 (1.4) |
| acc | acc+gyro | acc - acc+gyro | |||||
|---|---|---|---|---|---|---|---|
| Mean (SD) | Mean (SD) | Mean (SD) | |||||
| Upper arm | |||||||
| Inclination angle | |||||||
| Mean (°) | 33.3 | (4.7) | 34.3 | (5.0) | −0.9 | (0.5) | *** |
| Percentile (°) | |||||||
| 1st | 5.3 | (1.5) | 6.8 | (2.1) | −1.5 | (0.8) | *** |
| 5th | 10.6 | (2.6) | 12.5 | (3.4) | −1.9 | (0.9) | *** |
| 10th | 14.0 | (3.1) | 15.6 | (3.7) | −1.7 | (0.8) | *** |
| 25th | 20.3 | (3.7) | 21.1 | (4.0) | −0.9 | (0.5) | *** |
| 50th | 28.8 | (4.2) | 29.2 | (4.5) | −0.4 | (0.5) | *** |
| 75th | 41.6 | (5.8) | 42.4 | (6.4) | −0.8 | (0.9) | *** |
| 90th | 58.9 | (9.1) | 60.6 | (10.0) | −1.7 | (1.4) | *** |
| 99th | 100.2 | (13.8) | 100.1 | (13.6) | 0.1 | (1.0) | |
| Percentile range (°) | |||||||
| 10th–90th | 44.9 | (7.8) | 44.9 | (8.7) | 0.0 | (1.5) | |
| Proportion of time (%) | |||||||
| <20° | 25.6 | (9.9) | 23.0 | (11.2) | 2.6 | (1.7) | *** |
| >30° | 47.0 | (11.1) | 48.2 | (12.3) | −1.2 | (1.5) | *** |
| >45° | 20.9 | (7.2) | 21.9 | (7.6) | −1.0 | (0.9) | *** |
| >60° | 9.9 | (4.4) | 10.8 | (4.9) | −0.9 | (0.7) | *** |
| >90° | 2.2 | (1.4) | 2.3 | (1.6) | −0.1 | (0.2) | ** |
| Trunk | |||||||
| Inclination angle in the sagittal plane | |||||||
| Mean (°) | 15.0 | (4.8) | 15.2 | (4.7) | −0.2 | (0.6) | W |
| Percentile (°) | |||||||
| 1st | −13.6 | (7.7) | −12.0 | (8.2) | −1.7 | (1.2) | *** |
| 5th | −5.1 | (5.3) | −3.4 | (5.6) | −1.8 | (1.0) | *** |
| 10th | −1.4 | (4.7) | 0.3 | (4.8) | −1.7 | (0.8) | *** |
| 25th | 4.1 | (4.2) | 5.1 | (4.2) | −1.0 | (0.6) | *** W |
| 50th | 10.6 | (4.6) | 10.6 | (4.6) | 0.0 | (0.7) | W |
| 75th | 22.1 | (6.6) | 21.6 | (6.5) | 0.5 | (0.6) | *** |
| 90th | 38.9 | (7.4) | 38.0 | (7.2) | 1.0 | (0.7) | *** |
| 99th | 71.3 | (5.9) | 69.8 | (6.3) | 1.4 | (1.2) | *** W |
| Percentile range (°) | |||||||
| 10th–90th | 40.4 | (6.2) | 37.6 | (6.0) | 2.7 | (1.0) | *** |
| Proportion of time (%) | |||||||
| angle (−10° to 20°) | 68.9 | (8.6) | 70.2 | (8.7) | −1.4 | (1.2) | *** |
| <20° | 71.7 | (9.5) | 72.4 | (9.5) | −0.7 | (0.9) | *** |
| >30° | 17.2 | (7.0) | 16.7 | (7.0) | 0.5 | (0.5) | *** |
| >45° | 7.7 | (3.6) | 7.3 | (3.5) | 0.4 | (0.4) | *** |
| >60° | 3.2 | (1.7) | 2.9 | (1.6) | 0.3 | (0.2) | *** W |
| >90° | - | (-) | - | (-) | - | (-) | |
| Angular Velocity Computational Method | Incl. Vel. a | Gen. Vel. b | Incl. Vel. | Gen. Vel. | Gen. Vel.-Incl. Vel. | (Incl. Vel. with acc+gyro) - (Incl. Vel. with acc+gyro) | |||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Sensor Type | Acc | acc+gyro | acc | acc+gyro | acc-acc+gyro | acc | acc+gyro | ||||||||||||||||
| Mean (SD) | Mean (SD) | Mean (SD) | Mean (SD) | Mean (SD) | Mean (SD) | Mean (SD) | Mean (SD) | Mean (SD) | |||||||||||||||
| Upper arm | |||||||||||||||||||||||
| Angular velocity | |||||||||||||||||||||||
| Mean (°/s) | 50.0 | (12.3) | 27.7 | (6.6) | 94.2 | (26.8) | 44.2 | (10.1) | 22.3 | (6.8) | *** | 50.0 | (17.9) | *** | 44.2 | (14.9) | *** | 16.4 | (3.7) | *** | 66.4 | (21.2) | *** |
| Percentile (°/s) | |||||||||||||||||||||||
| 5th | 1.2 | (0.6) | 0.5 | (0.3) | 4.3 | (2.5) | 1.4 | (1.0) | 0.7 | (0.3) | *** | 2.9 | (1.6) | *** | 3.2 | (2.0) | *** | 0.9 | (0.7) | *** | 3.9 | (2.3) | *** |
| 10th | 3.0 | (1.4) | 1.2 | (0.7) | 10.1 | (5.4) | 3.6 | (2.2) | 1.8 | (0.8) | *** | 6.5 | (3.3) | *** | 7.1 | (4.1) | *** | 2.4 | (1.5) | *** | 8.9 | (4.8) | *** |
| 25th | 11.5 | (4.3) | 5.0 | (2.0) | 31.9 | (12.1) | 12.8 | (4.7) | 6.5 | (2.4) | *** | 19.0 | (7.6) | *** | 20.3 | (7.9) | *** | 7.8 | (2.8) | *** | 26.8 | (10.3) | *** |
| 50th | 32.9 | (9.3) | 15.9 | (4.3) | 71.2 | (20.6) | 31.3 | (7.9) | 16.9 | (5.3) | *** | 39.9 | (13.4) | *** | 38.3 | (11.6) | *** | 15.4 | (3.7) | *** | 55.3 | (16.7) | *** |
| 75th | 69.9 | (17.1) | 37.7 | (9.2) | 128.7 | (35.3) | 61.7 | (14.0) | 32.2 | (9.3) | *** | 67.0 | (23.0) | *** | 58.8 | (18.8) | *** | 24.0 | (5.3) | *** | 91.0 | (27.5) | *** |
| 90th | 119.0 | (27.5) | 70.5 | (16.6) | 203.9 | (56.8) | 102.2 | (22.3) | 48.5 | (15.0) | *** | 101.7 | (38.2) | *** | 84.9 | (30.4) | *** | 31.7 | (6.6) | *** | 133.4 | (43.6) | *** |
| 99th | 248.7 | (55.8) | 155.8 | (32.3) | 415.7 | (118.4) | 195.5 | (37.8) | 93.0 | (32.3) | *** | 220.2 | (86.8) | *** | 167.0 | (65.6) | *** | 39.8 | (9.0) | *** | 259.9 | (93.6) | *** |
| Proportion of time (%) | |||||||||||||||||||||||
| <5°/s | 15.5 | (5.4) | 25.9 | (6.2) | 7.4 | (4.8) | 13.8 | (5.5) | −10.4 | (2.0) | *** | −6.4 | (1.8) | *** | −8.1 | (1.4) | *** | −12.1 | (1.8) | *** | −18.5 | (3.2) | *** |
| >90°/s | 17.1 | (6.6) | 6.2 | (3.3) | 38.8 | (11.2) | 13.3 | (5.9) | 10.9 | (4.0) | *** | 25.6 | (6.2) | *** | 21.7 | (4.8) | *** | 7.1 | (2.8) | *** | 32.6 | (8.5) | *** |
| Combined parameter | |||||||||||||||||||||||
| <15° and <5°/s | 1.7 | (1.4) | 2.8 | (2.3) | 0.6 | (0.9) | 1.3 | (1.5) | −1.1 | (1.1) | *** W | −0.7 | (0.7) | *** W | −1.0 | (0.7) | *** | −1.5 | (1.1) | ***W | −2.2 | (1.7) | *** W |
| <20° and <5°/s | 3.4 | (2.1) | 6.1 | (3.5) | 1.3 | (1.4) | 2.9 | (2.2) | −2.7 | (1.7) | *** | −1.6 | (1.0) | *** | −2.0 | (1.0) | *** | −3.2 | (1.8) | *** | −4.8 | (2.7) | *** |
| acc | acc+gyro | acc-acc+gyro | |||||
|---|---|---|---|---|---|---|---|
| Mean (SD) | Mean (SD) | Mean (SD) | |||||
| Trunk | |||||||
| Sagittal inclination velocity | |||||||
| Mean (°/s) | 31.3 | (6.5) | 12.5 | (2.2) | 18.8 | (4.6) | *** |
| Percentile (°/s) | |||||||
| 5th | 1.1 | (0.5) | 0.4 | (0.2) | 0.7 | (0.3) | *** |
| 10th | 2.4 | (1.0) | 0.8 | (0.3) | 1.6 | (0.6) | *** |
| 25th | 7.5 | (2.5) | 2.7 | (0.8) | 4.9 | (1.7) | *** |
| 50th | 20.2 | (5.0) | 7.6 | (1.7) | 12.6 | (3.5) | *** |
| 75th | 43.3 | (9.3) | 16.7 | (3.1) | 26.6 | (6.6) | *** |
| 90th | 74.7 | (14.5) | 30.1 | (5.3) | 44.6 | (10.2) | *** |
| 99th | 157.5 | (26.4) | 72.6 | (9.8) | 85.0 | (19.4) | *** |
| Percentile range (°/s) | |||||||
| 10th–90th | 72.4 | (13.8) | 29.3 | (5.0) | 43.1 | (9.8) | *** |
| Proportion of time (%) | |||||||
| <5°/s | 19.4 | (5.7) | 39.1 | (6.2) | −19.7 | (2.5) | *** |
| >90°/s | 6.7 | (3.0) | 0.4 | (0.3) | 6.3 | (2.8) | *** |
| Combined parameter | |||||||
| angle (−10° to 20°) AND vel < 5°/s | 11.7 | (3.8) | 27.5 | (5.8) | −15.8 | (2.9) | *** |
| Angle < 15° AND vel < 5 °/s | 10.9 | (3.9) | 25.3 | (6.6) | −14.3 | (3.4) | *** |
| Angle < 20° AND vel < 5 °/s | 12.6 | (4.1) | 28.8 | (6.2) | −16.2 | (3.0) | *** |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fan, X.; Lind, C.M.; Rhen, I.-M.; Forsman, M. Effects of Sensor Types and Angular Velocity Computational Methods in Field Measurements of Occupational Upper Arm and Trunk Postures and Movements. Sensors 2021, 21, 5527. https://doi.org/10.3390/s21165527
Fan X, Lind CM, Rhen I-M, Forsman M. Effects of Sensor Types and Angular Velocity Computational Methods in Field Measurements of Occupational Upper Arm and Trunk Postures and Movements. Sensors. 2021; 21(16):5527. https://doi.org/10.3390/s21165527
Chicago/Turabian StyleFan, Xuelong, Carl Mikael Lind, Ida-Märta Rhen, and Mikael Forsman. 2021. "Effects of Sensor Types and Angular Velocity Computational Methods in Field Measurements of Occupational Upper Arm and Trunk Postures and Movements" Sensors 21, no. 16: 5527. https://doi.org/10.3390/s21165527
APA StyleFan, X., Lind, C. M., Rhen, I. -M., & Forsman, M. (2021). Effects of Sensor Types and Angular Velocity Computational Methods in Field Measurements of Occupational Upper Arm and Trunk Postures and Movements. Sensors, 21(16), 5527. https://doi.org/10.3390/s21165527