
An Approach to Steady-State Power Transformer Modeling Considering Direct Current Resistance Test Measurements


Abstract
:1. Introduction
2. Proposed Steady-State Transformer Model
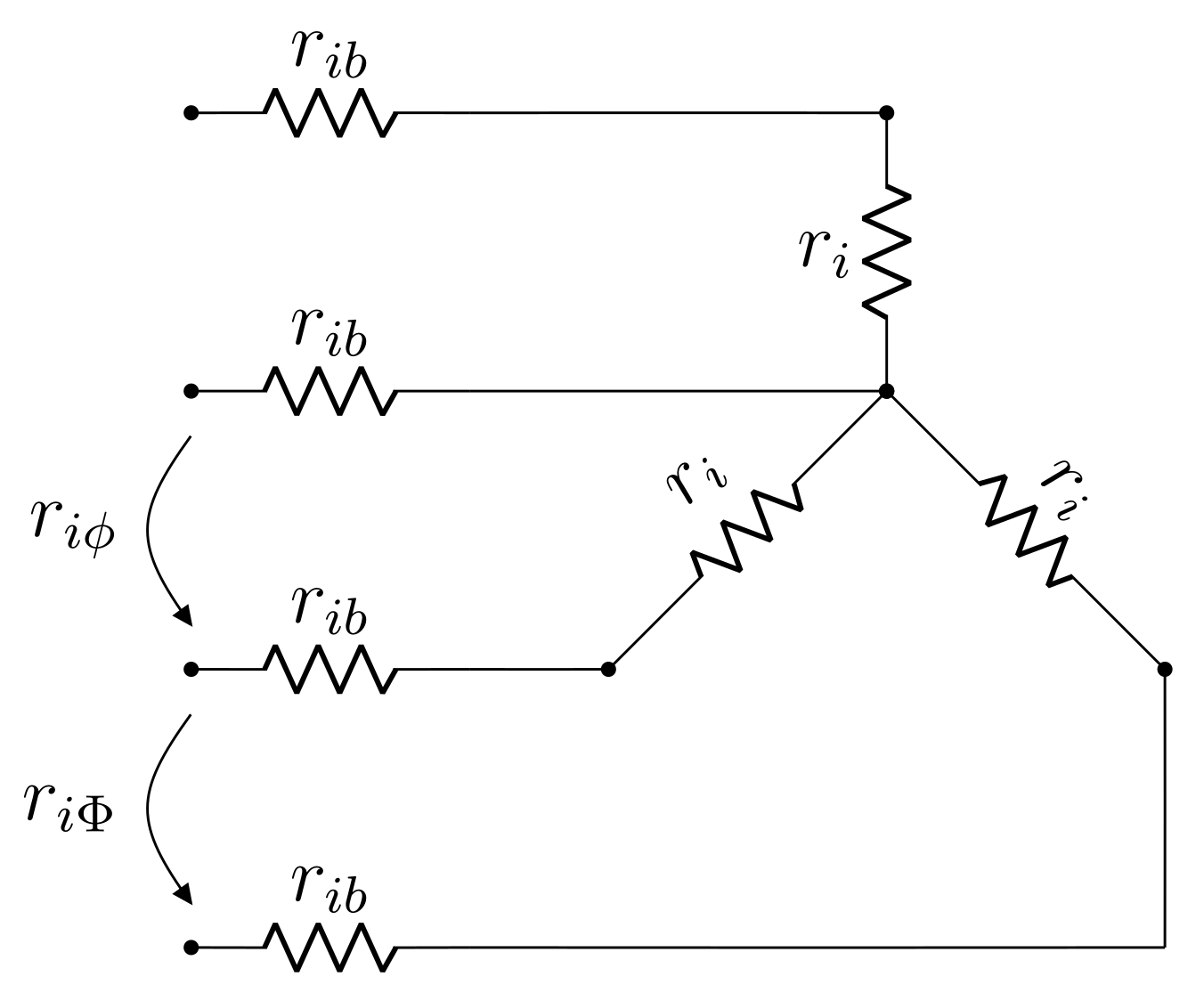
2.1. Equivalent DC Circuit of Y Winding
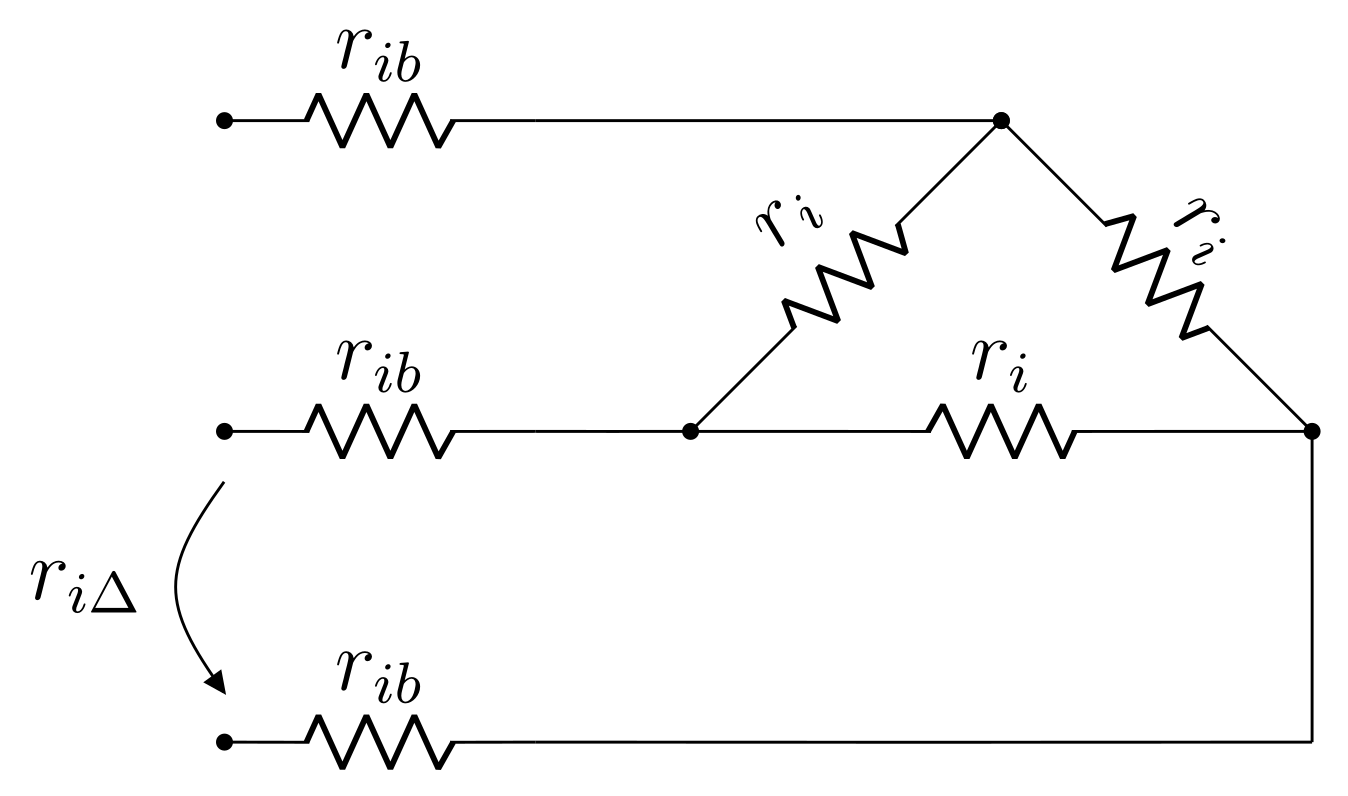
2.2. Equivalent DC Circuit of Winding
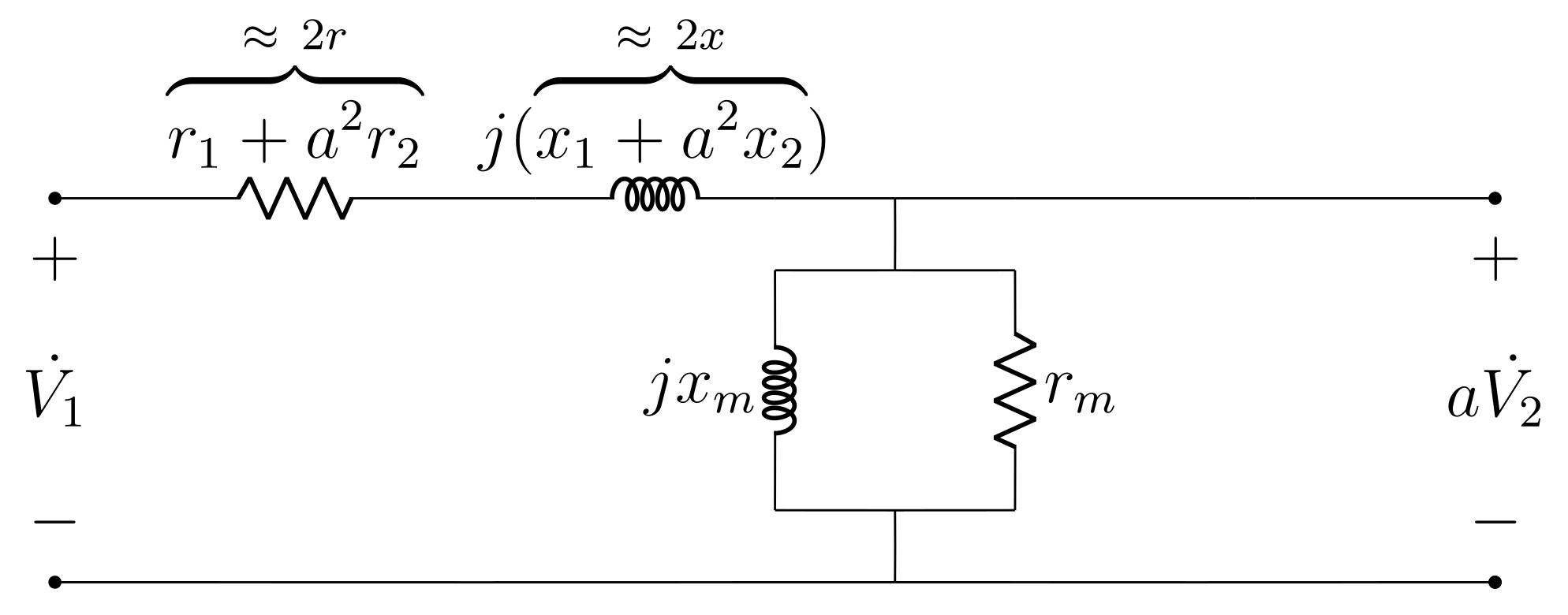
2.3. Equivalent Per-Phase AC Circuit
2.4. Summary of the Proposed Model
2.5. On the Connection Resistance
3. Experiment
4. Comparison of Output Voltage Computation
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Sereeter, B.; Vuik, K.; Witteveen, C. Newton Power Flow Methods for Unbalanced Three-Phase Distribution Networks. Energies 2017, 10, 1658. [Google Scholar] [CrossRef]
- Kersting, W. Distribution System Modeling and Analysis; CRC Press: Boca Raton, FL, USA, 2016. [Google Scholar]
- Sauter, P.S.; Braun, C.A.; Kluwe, M.; Hohmann, S. Comparison of the Holomorphic Embedding Load Flow Method with Established Power Flow Algorithms and a New Hybrid Approach. In Proceedings of the 2017 Ninth Annual IEEE Green Technologies Conference (GreenTech), Denver, CO, USA, 29–31 March 2017; pp. 203–210. [Google Scholar] [CrossRef]
- Rao, B.V.; Kupzog, F.; Kozek, M. Three-Phase Unbalanced Optimal Power Flow Using Holomorphic Embedding Load Flow Method. Sustainability 2019, 11, 1774. [Google Scholar] [CrossRef] [Green Version]
- Chen, T.H.; Chen, M.S.; Inoue, T.; Kotas, P.; Chebli, E. Three-phase cogenerator and transformer models for distribution system analysis. IEEE Trans. Power Deliv. 1991, 6, 1671–1681. [Google Scholar] [CrossRef]
- Srithapon, C.; Fuangfoo, P.; Ghosh, P.K.; Siritaratiwat, A.; Chatthaworn, R. Surrogate-Assisted Multi-Objective Probabilistic Optimal Power Flow for Distribution Network with Photovoltaic Generation and Electric Vehicles. IEEE Access 2021, 9, 34395–34414. [Google Scholar] [CrossRef]
- Zargar, B.; Monti, A.; Ponci, F.; Martí, J.R. Linear Iterative Power Flow Approach Based on the Current Injection Model of Load and Generator. IEEE Access 2021, 9, 11543–11562. [Google Scholar] [CrossRef]
- Liu, D.; Liu, L.; Cheng, H.; Zhang, S.; Xin, J. An Extended DC Power Flow Model Considering Voltage Magnitude. J. Mod. Power Syst. Clean Energy 2021, 9, 679–683. [Google Scholar] [CrossRef]
- Claeys, S.; Deconinck, G.; Geth, F. Voltage-Dependent Load Models in Unbalanced Optimal Power Flow Using Power Cones. IEEE Trans. Smart Grid 2021, 12, 2890–2902. [Google Scholar] [CrossRef]
- Deng, L.; Sun, Q.; Jiang, F.; Wang, S.; Jiang, S.; Xiao, H.X.; Peng, T. Modeling and Analysis of Parasitic Capacitance of Secondary Winding in High-Frequency High-Voltage Transformer Using Finite-Element Method. IEEE Trans. Appl. Supercond. 2018, 28, 1–5. [Google Scholar] [CrossRef]
- Changjiang, Z.; Qian, W.; Huai, W.; Zhan, S.; Bak, C.L. Electrical Stress on the Medium Voltage Medium Frequency Transformer. Energies 2021, 14, 5136. [Google Scholar] [CrossRef]
- Liu, X.; Wang, Y.; Zhu, J.; Guo, Y.; Lei, G.; Liu, C. Calculation of Capacitance in High-Frequency Transformer Windings. IEEE Trans. Magn. 2016, 52, 1–4. [Google Scholar] [CrossRef]
- Umans, S.; Kingsley, C. Fitzgerald & Kingsley's Electric Machinery; McGraw-Hill Series in Electrical and Computer Engineering; McGraw-Hill: New York, NY, USA, 2014. [Google Scholar]
- Valchev, V.; Van den Bossche, A. Inductors and Transformers for Power Electronics; CRC Press: Boca Raton, FL, USA, 2018. [Google Scholar]
- IEEE Xfrmrs & Reactors Working Group Guide for Diagnostic Field Testing of Fluid-Filled Power Transformers, Regulators, and Reactors. Available online: https://standards.ieee.org/standard/C57_152-2013.html (accessed on 10 August 2021).
- IEEE Temp Rise Test Above NP Rating Working Group Recommended Practice for Performing Temperature Rise Tests on Liquid-Immersed Power Transformers at Loads Beyond Nameplate Ratings. Available online: https://standards.ieee.org/standard/C57_119-2018.html (accessed on 10 August 2021).
- Chowdhury, R.; Rusicior, M.; Vico, J.; Young, J. How transformer DC winding resistance testing can cause generator relays to operate. In Proceedings of the 2016 69th Annual Conference for Protective Relay Engineers (CPRE), College Station, TX, USA, 4–7 April 2016; pp. 1–14. [Google Scholar] [CrossRef]
- Fehr, R. Industrial Power Distribution; IEEE Press Series on Power and Energy Systems; Wiley: Hoboken, NJ, USA, 2015. [Google Scholar]
- Hitachi ABB Power Grids. Transformer bushing type GOB—Installation and maintenance guide. In 2750 515-12 EN REV. 12; Hitachi ABB Power Grids: Dalarna, Sweden, 2020. [Google Scholar]
- Gonzalez, D.; Hopfeld, M.; Berger, F.; Schaaf, P. Investigation on Contact Resistance Behavior of Switching Contacts Using a Newly Developed Model Switch. IEEE Trans. Components, Packag. Manuf. Technol. 2018, 8, 939–949. [Google Scholar] [CrossRef]
- Zhai, C.; Hanaor, D.; Proust, G.; Gan, Y. Stress-Dependent Electrical Contact Resistance at Fractal Rough Surfaces. J. Eng. Mech. 2017, 143, B4015001. [Google Scholar] [CrossRef]
- Giancoli, D. Physics; Addison-Wesley: Boston, MA, USA, 2008. [Google Scholar]
- De Leon, F.; Farazmand, A.; Joseph, P. Comparing the T and π Equivalent Circuits for the Calculation of Transformer Inrush Currents. IEEE Trans. Power Deliv. 2012, 27, 2390–2398. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Test | Voltage (V) | Current (A) | Power (W) |
|---|---|---|---|
| Short Circuit | 1438 | 0.75 | 849 |
| Open Circuit | 380 | 0.91 | 183 |
| Test | Resistance |
|---|---|
| 422 | |
| 47 | |
| 27 |
| Parameter | Proposed Model (DC Resistances) | Proposed Model (Temperature Correction) | Standard Model |
|---|---|---|---|
| 611.0 | 733.2 | 754.7 | |
| 20.0 | 24.0 | 30.4 | |
| 7.3 | 8.8 | — | |
| 3.5 | 4.2 | — |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pires Corrêa, H.; Henrique Teles Vieira, F. An Approach to Steady-State Power Transformer Modeling Considering Direct Current Resistance Test Measurements. Sensors 2021, 21, 6284. https://doi.org/10.3390/s21186284
Pires Corrêa H, Henrique Teles Vieira F. An Approach to Steady-State Power Transformer Modeling Considering Direct Current Resistance Test Measurements. Sensors. 2021; 21(18):6284. https://doi.org/10.3390/s21186284
Chicago/Turabian StylePires Corrêa, Henrique, and Flávio Henrique Teles Vieira. 2021. "An Approach to Steady-State Power Transformer Modeling Considering Direct Current Resistance Test Measurements" Sensors 21, no. 18: 6284. https://doi.org/10.3390/s21186284
APA StylePires Corrêa, H., & Henrique Teles Vieira, F. (2021). An Approach to Steady-State Power Transformer Modeling Considering Direct Current Resistance Test Measurements. Sensors, 21(18), 6284. https://doi.org/10.3390/s21186284