This section describes the experimentation performed with the application and its main results, which consisted of: (i) evaluating the fuzzy rotation detector; (ii) evaluating the sensory fusion strategy developed for the crossing intention detector; and (iii) comparing the performance of the safe route planning algorithm against the same routes generated by default with Google Maps. To carry out the experimentation, a BQ Aquaris V smartphone with an eight-core Qualcomm Snapdragon 435 processor (1.4 GHz), Adreno 505 graphics processing unit, 4 GB RAM and 64 GB storage capacity over Android 8.1.0 was used. This smartphone was distributed to all volunteers to carry out all the tests listed below.
3.3. Evaluation of the Sensory Fusion of the Crossing Intention Detector
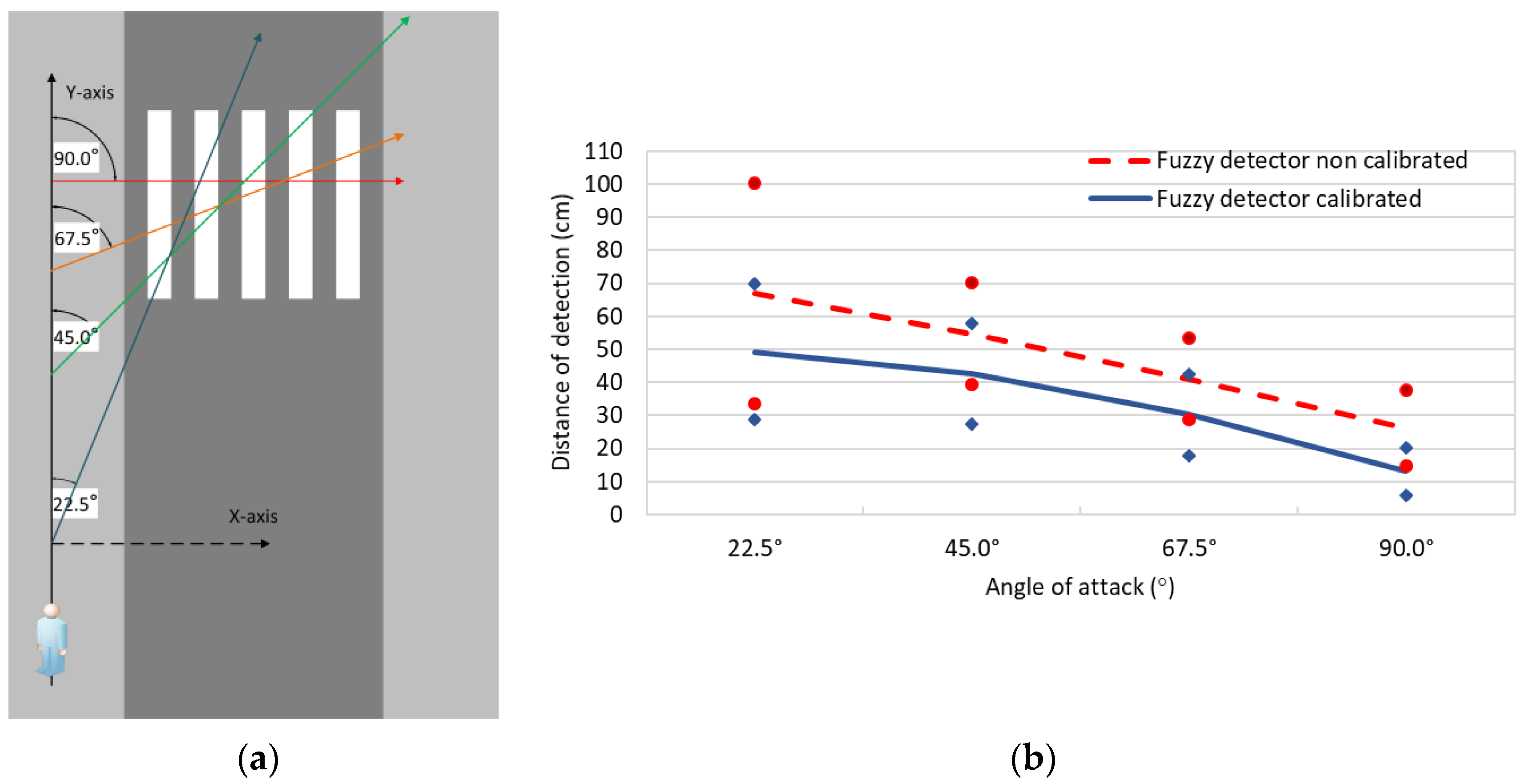
The performance of the crossing intention detector has been evaluated using a receiver operating characteristic (ROC) analysis as described in [
33]. The experimentation was carried out in a real environment under controlled conditions similar to that of
Figure 7a to obtain sensitivity against specificity of the detector. The performance has been measured by means of a confusion matrix of 2 × 2 elements that relates positive (
p) and negative (
n) values (
Table 5). To do this, the detection of the intention to cross of a pedestrian is considered positive while the nondetection of the turn intention is considered negative.
The experimentation carried out has obtained a total of eight confusion matrices, which provide the performance of the sensory fusion for each of the angles shown in
Figure 7a, both calibrated and uncalibrated. To this end, 390 samples were used for each confusion matrix, totaling 3120 samples. The distribution of individuals who have undergone the tests is as described in
Section 3.1. To carry out the collection of the samples, each subject was provided with a mobile device with the Android operating system, the application installed and containing the route with the test crosswalk. First, each volunteer performed the tests with the uncalibrated device; subsequently, the fuzzy labels of the fuzzy rotation detector were calibrated, and the same tests were repeated with the turn detector calibrated.
The series of tests consisted of (i) walking straight without intending to cross a pedestrian crossing; (ii) walking straight and then crossing the crosswalk according to the rotation angle set in each confusion matrix (i.e., 22.5°, 45°, 67.5° and 90°). It was established that, to consider a sample as true positive, the intention to cross had to be detected before entering the crosswalk; it was considered a false negative if the intention to cross was not detected or if the intention to cross was detected once a pedestrian entered the crosswalk; it was considered a false positive if a pedestrian was walking straight (i.e., no intention to cross the zebra crossing); and finally, it was considered a true negative when a pedestrian was walking straight and no intention to cross was detected.
After the experimentation, the average accuracy for the uncalibrated crossing intention detector was 84.74% with an F1-Score of 87.77%, whilst the calibrated crossing intention detector obtained an average accuracy of 98.63% with an F1-Score of 98.97%. As seen, the sensory fusion of the calibrated crossing intention detector offers better performance than the uncalibrated detector in all case studies and improves all the metrics in
Table 6. Specifically, the average rate of true positives is 98.27% for the calibrated crossing intention detector. This is an excellent and fairly accurate value given a precision rate of 99.7%. Moreover, we found that the specificity is quite high reaching a level of 99.39%. Due to this, it can be affirmed that the sensory fusion of the calibrated crossing intention detector has high sensitivity and specificity, which makes the app very suitable for real use in cities.
It can be said—looking into the results obtained by the sensory fusion of the calibrated crossing intention detector—that the best results are found when detecting the crossing intention with 90° rotation. On the contrary, less relevant metrics are observed when the sensory fusion of the crossing intention detector is related to 22.5° rotation. This confirms, as in the case studied in
Section 3.2, that the detection of rotation at smaller angles is more difficult to identify and because of this, the performance is reduced. Despite this, the sensory fusion of the calibrated crossing intention detector offers a better metric in the worst case than the best case for the uncalibrated detector. The best results obtained with the crossing intention detector are those achieved at angles of 90°, where it is observed that a value of 100% is always obtained in all the metrics except in the false positive rate (FPR), which is 0%, as expected. The following better metrics are obtained with angles around 67.5°. In this case, it is observed how the true positive rate (TPR) is reduced a little—although it is still very good like the rest of the rates—indicating that there have been some turns that have not been correctly detected by the calibrated crossing intention detector. The metrics corresponding to the rotations with an angle of 45° are found as the following better results for which a decrease in the TPR is observed. However, the biggest concern could be considered that the FPR is no longer 0%. Therefore, it suggests that the classifier detected the crossing intention at the wrong time. The same occurs for angles close to 22.5°; since the FPR rate increased to 1.68, the rest of the metrics are also reduced. This way, the calibrated crossing intention detector achieves the least robust set of metrics around an angle of 22.5° (TPR of 94.64%, accuracy (ACC) of 95.67% and F1-Score 96.86%). This is due to, in these cases, the rotation produced by the user is very slight and difficult to detect by the sensors currently used. In the same way, a limitation could be that all volunteers reside in the province of Huelva (Spain). This could have a bias due to the way they walk or cross the pedestrian crossing because they belong to the same specific geographical area. Another limitation can also be the calibration of the fuzzy labels at a specific moment. This calibration could become invalid if the user changes their gait for reasons such as it starts to rain, or he/she receives a phone notification (e.g., call, SMS or WhatsApp). It is important to highlight that the limitations on precision generated by a GPS sensor have been eliminated with the use of the fuzzy logic as mentioned in
Section 2.2.2. For all the above, it can be confirmed that the fuzzy logic strategy using a mobile phone as a crossing intention detector on public roads offers good results, being demonstrated by the data generated by the experimentation carried out.
3.4. Comparison of Routes Generated
To evaluate the contribution made with the routing algorithm developed in the mobile application, a cloud-hosted database was created with a total of 79 pedestrian points of interest. These test points represent zebra crossings, walkways and pedestrian streets in different cities of Spain and Portugal (i.e., Huelva, Seville, Bollullos Par del Condado, Almonte, Camas, Tavira and Faro). In order to determine the safety improvement achieved by the routes traced with the application, these have been compared to the routes generated by Google Maps. The points of interest proposed have been used to demonstrate the errors made by Google Maps and how the proposed application improves the routes it generates.
The comparison makes it possible to study how Google Maps falls into various conflicting routes. For instance, it indicates pedestrians to circulate as if they were vehicles (e.g., using roundabouts), it does not direct people to take available pedestrian streets and it does not use walkways to cross three- or four-lane tracks.
Table 7 shows a comparison of the routes generated by Google Maps versus the routes generated by the proposed algorithm. It shows the number of cases per route typology, average time difference, average distance difference, and average improvement achieved regarding safe zones. In summary,
Table 7 shows that the routes calculated by the algorithm are safer than those generated by Google Maps by making use of a greater number of pedestrian zones. In contrast, the routes generated by the algorithm generally increase the time and distance of the path. The percent difference in each of these cases has been calculated as shown in Equation (2):
In addition to these values, a composed metric has been proposed to evaluate the performance of the routes generated by the application against the routes generated by Google Maps. This metric has been called Composed Performance Metric (CPM) and it expresses the quality of the route—through a single value—as a function of the time, distance and number of safe pedestrian areas of the route. To make use of this metric, it is necessary for the values to be normalized from 0 to 1. For this, the min-max method described in [
34] has been used. Once the values have been normalized, it is important to highlight that the values referring to the time and distance used in the route are better the closer to zero they are, while the values referring to the number of pedestrian areas are better the closer to one they are. Therefore, they will be represented by subtracting the normalized time and distance values from 1. Moreover, the number of pedestrian areas is represented according to the value obtained in the normalization. The metric is expressed mathematically by Equation (3):
where
K1,
K2 and
K3 represent the weight for each of the values in the compound metric. The sum of
K1,
K2 and
K3 must add up to 1. For the current case, an equitable weight has been used (i.e.,
K1,
K2 and
K3 have been set to 0.333). This compound metric supports modifying these weights to give greater importance to the factor to be highlighted (i.e., time, distance or safety). This metric has been used to evaluate each of the 30 routes studied, being better the closer its value is to 1. To this end, an average result for each type of route has been included in
Table 7.
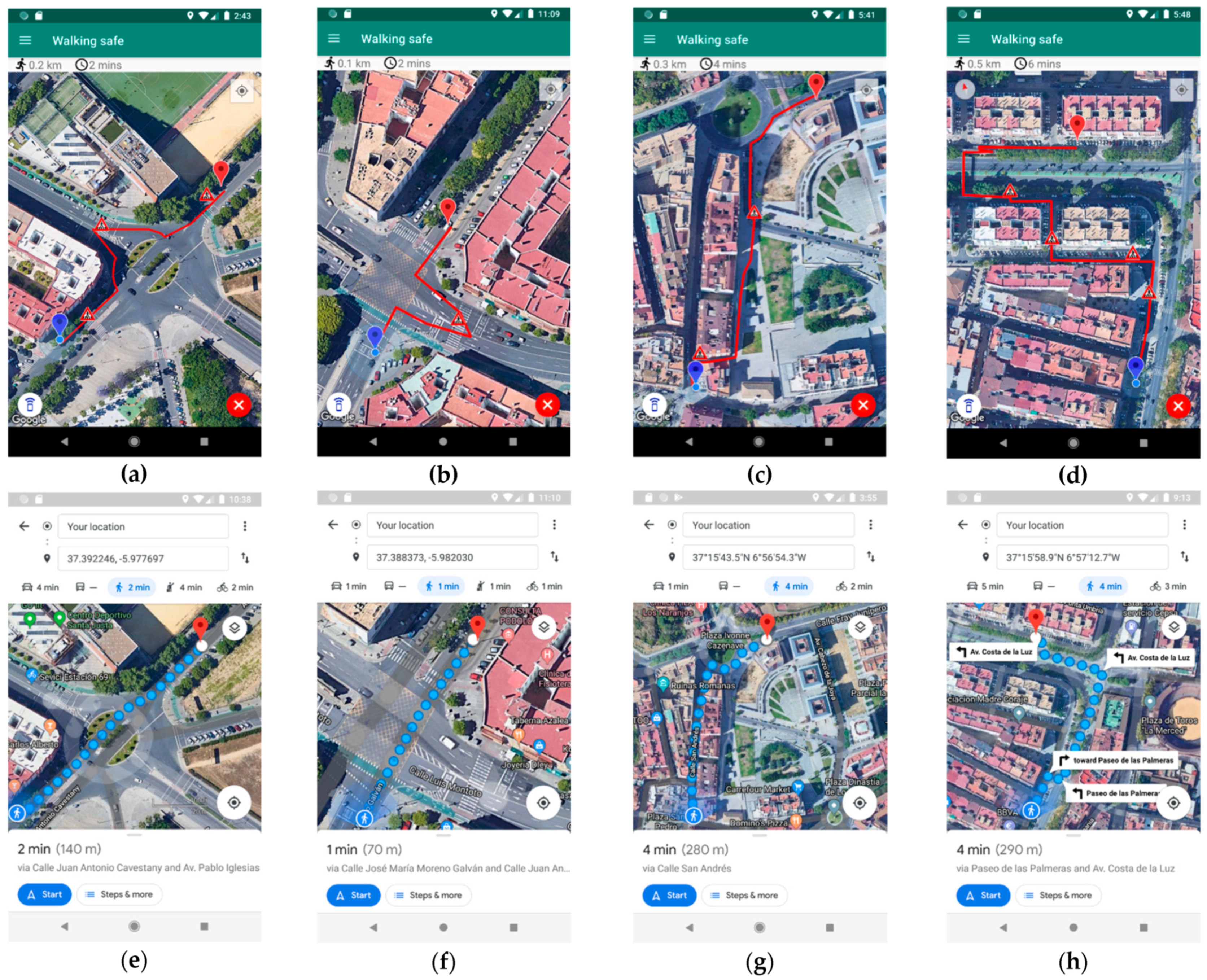
Table 7 presents a comparison of the routes generated by the app developed and Google Maps. The first case shown in the table prevents a pedestrian from taking roundabouts as a vehicle, which is what happens with the routes generated by Google Maps. The routes generated by the app to avoid this scenario offer an improved safety of 243.75% compared to Google Maps, although this entails an increase in time and distance of 48.80% and 23.65%, respectively. In the same way, the app achieves a better CPM than Google Maps (0.65 and 0.62, respectively). The main improvement of this type of routes lies in indicating to pedestrians that they must move to the nearest zebra crossing instead of taking a roundabout as a vehicle (an example is shown in
Figure 8a). On the contrary, Google Maps generates an unsafe route for the same origin and destination points. These route types are unsafe because pedestrians circulate through roundabouts regardless of whether they are walking in the opposite direction to the vehicles or if they are crossing the roundabout through the center, thereby generating a road safety problem for pedestrians and drivers, as it is shown in
Figure 8e.
The second case aims to prevent a pedestrian from crossing public roads regardless of where the crossing is made. In other words, the application can generate routes that allow a pedestrian to avoid dangerous crossings by guiding pedestrians to zebra crossings so that they can safely cross the road. This type of route generated by the app obtains an average improvement in road safety of 183.00%, and in CPM (0.58 and 0.56, respectively). This also leads to an increase in time and distance required to complete the route (23.41% and 35.24%, respectively). An example of this route type is found in Seville (Spain), where, to cross a four-lane road, the developed app indicates the pedestrian to move to the closest crosswalk to avoid a possible run-over when crossing the street in the wrong place (
Figure 8b). For this same crossing, Google Maps indicates the pedestrian to cross in a straight line regardless of his/her physical integrity. This poses a risk to the life and road safety of persons, which increases if they do not know the city, suffer from a visual problem, or have reduced mobility. The calculated route by Google Maps can be seen in
Figure 8f.
The third case shows that Google Maps does not make efficient use of pedestrian streets in the cities, these being the ones that provide the most road safety to pedestrian because vehicles cannot circulate through them. In the proposed comparison, it is observed that the app manages to increase road safety by 215.48% on average compared to Google Maps, as well as reducing the distance to travel by 0.66%. Additionally, the CPM of the app is better than the CPM achieved with Google Maps (0.66 and 0.62, respectively). In this case, despite reducing the distance to travel, the Google Directions API does not show a reduction in time but an increase of 10.71%. An example of the aforementioned improvement is described in
Figure 8c, where the app makes use of pedestrian areas such as the one that persons pass through. In this way, the road safety of pedestrians increases when walking through areas where there should not be cars circulating or parking. For the same route, Google Maps offers a trajectory where the use of pedestrian areas is not prioritized. In this case, Google Maps prefers to give the pedestrian a less safe route to travel a total of 20 m less than the route generated by the app, as it can be seen in
Figure 8g.
Last but not least, the best results from the point of view of road safety comes from the routes that make use of pedestrian walkways to cross a road with three or four lanes. These routes improve safety by 266.67% on average. It is necessary to indicate that this increase in safety also increases the times and distance of the routes on average (147.62% and 129.26%, respectively). This is due to the need to move the user to the pedestrian walkways instead of crossing roads where the user’s integrity is in danger. These highly dangerous roads can be especially problematic for people with reduced mobility or with severe auditory or visual problems. In these cases, the route generated by the developed app provides even more significant safety than the route generated by Google Maps, despite the increased time and distance included. For these reasons, the CPM shows a tie between the routes generated by the app and Google Maps. An example of these routes is shown in
Figure 8a, where it is observed how the pedestrian is indicated to move to the beginning of the pedestrian walkway used to cross a four-lane road that separates the origin and destination points. This way, the pedestrian needs to walk more time and a larger distance, improving at the same time its road safety. Moreover, when the pedestrian is in the most dangerous point of the route—near the access to a highway—he/she is at the safest point of the route since he/she is walking by a walkway only used for people. On the contrary, Google Maps provides a shorter distance and time, but it does not consider the road safety of the pedestrian. Thus, it tells the pedestrian to walk in the opposite direction of the vehicles on a road that does not have sidewalks. Google Maps also tells the pedestrian to walk along a road called “Av. Costa de la luz”, which is an access to join a highway. So, at the most dangerous point of the route, the pedestrian is more vulnerable to being run over because drivers do not expect to find a pedestrian on the access to a highway.
The limitations observed in this experimentation refer to the number of sites collected in an external database, since the ideal would be to have all the locations of pedestrian zones in the different cities studied and not just a sample of some dangerous locations. Another limitation refers to the drawing of the routes based on the Google Maps engine, which does not allow modifying the routes to make them pass on the sidewalk and always represents the routes on the road. Finally, based on the results obtained, it can be said that the routes generated by the app are safer than those generated by Google Maps. It has been achieved by guiding pedestrians for a longer time through reserved areas or by guiding them to a crossing where pedestrians have priority. Moreover, the total CPM shows that the routes generated by the app (0.64) are better in general than those obtained by Google Maps (0.61), since the increase in road safety provided by the application is greater than the increase in time and distance caused.
To finish, it is important to highlight that—to use the app—the smartphone always needs to be connected to the Internet because it uses several APIs and an external database that requires cloud connectivity. For this reason, we recorded the times taken by the app to calculate several routes based on the number of pedestrian points of interest and a 4G connection. The experimentation consisted in grouping the routes by the number of points of interest and averaging a series of 20 times. Accordingly, the results obtained were 1.9 ± 0.22 s to calculate the routes with one point of interest; 2.13 ± 0.37 s for routes with two points of interest; 2.13 ± 0.32 s for routes with three points of interest; 2.29 ± 0.28 s for routes with four points of interest; and 2.25 ± 0.41 s for routes with six points of interest. As a rule of thumb, the more points of interest added, the more time the algorithm takes to calculate the route. In this sense, the need for the Internet can be considered as a limitation in itself because, if the smartphone does not have connectivity to the cloud, the app cannot calculate the requested routes.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}







