
Communication Network Architectures for Driver Assistance Systems

 ,
,  ,
,  ,
,  and
and 
Abstract
:1. Introduction
2. Related Work
- test of a specific CNN-based solution for the practical implementation of the pedestrian detection subsystem, including the design of the related setting parameters to guarantee the required timeliness of the warning message delivery;
- definition of three different communication network architectures able to deliver the alert messages generated by the PD to the intended vehicles; among them, an entirely distributed communication infrastructure using local area wireless technologies was presented and analyzed in this paper;
- discussion on efficient solutions for managing and delivering alert messages to the intended users in the crossroad area for each one of the considered communication infrastructures for ADAS; to this purpose the concepts of local relevant area and of extended crossroad area were introduced;
- a format for the alert message to be broadcast using the emergency warning system embedded into the public mobile networks was presented.
3. Driving Assistance System
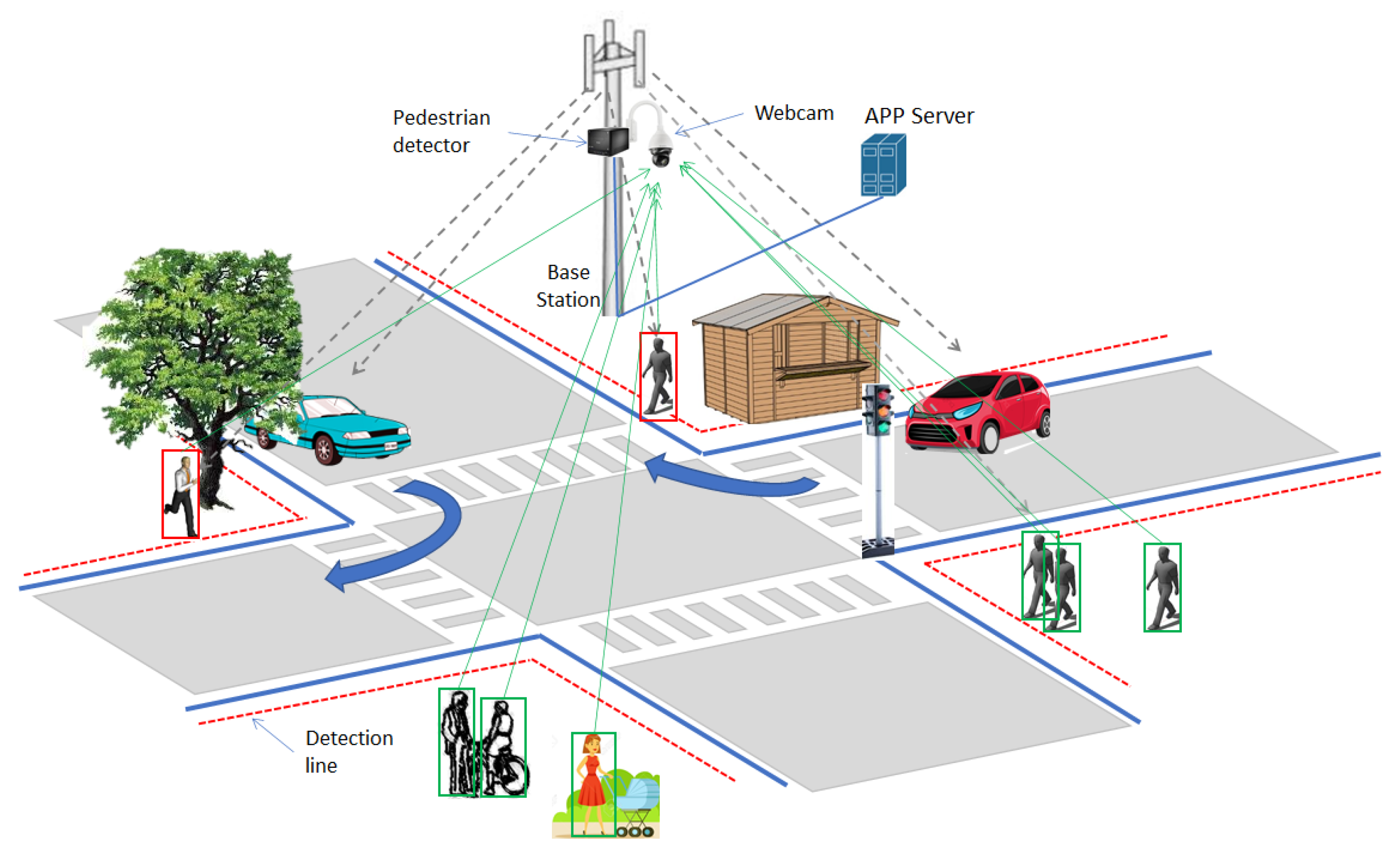
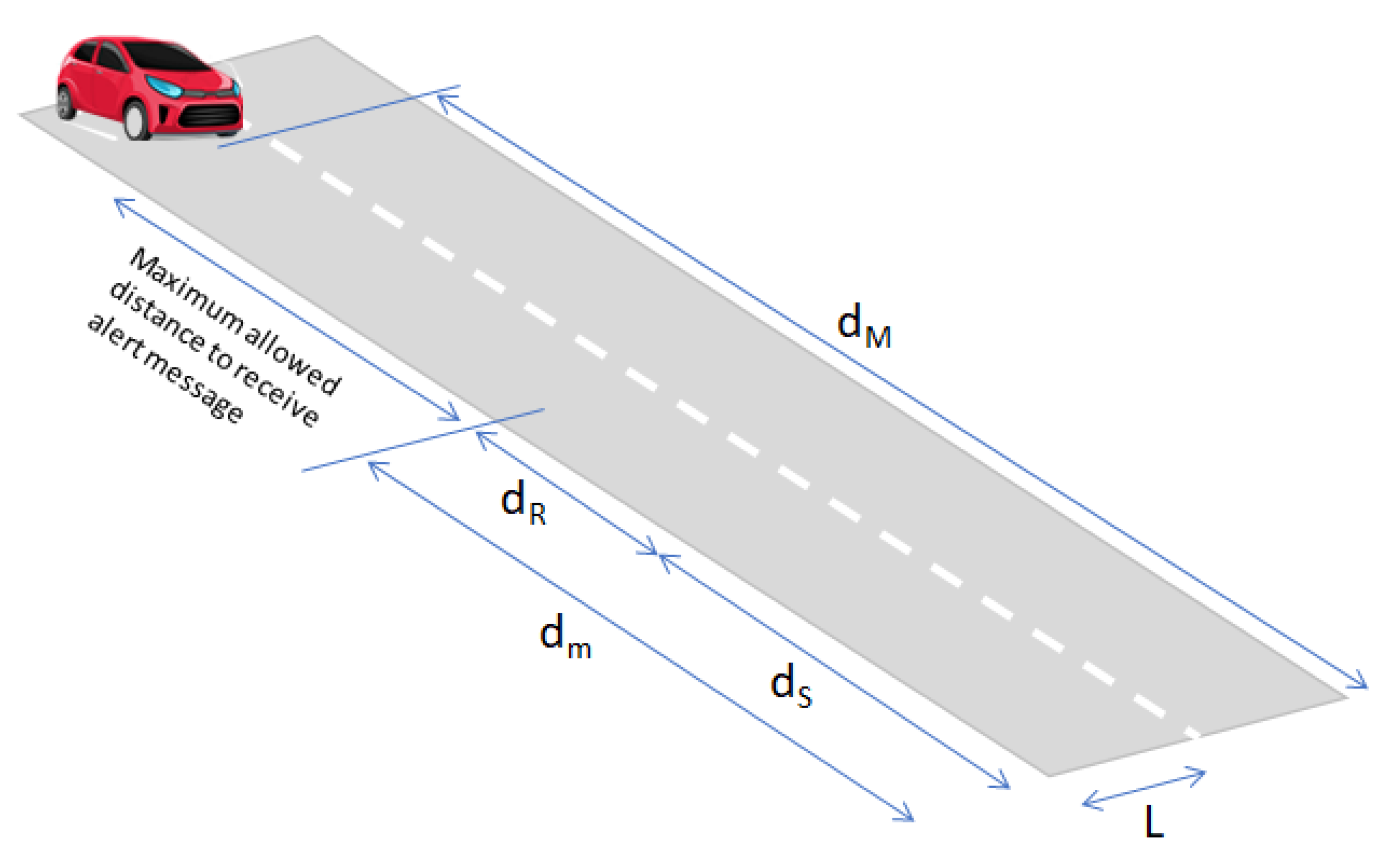
3.1. Operational Scenario
3.2. ADAS Principle Architecture
- the video camera monitoring the crossing area (installed in a favorable position);
- the PD, which classifies pedestrians and may possibly generate alerts in the case of crossing;
- the communication infrastructure required for the PD to communicate with the AS and for the AS to alert vehicles;
- the app running on the smartphone/tablet of the driver or running on the device(s) for the autonomous driving.
4. Analysis of Solutions for the Communication Subsystem
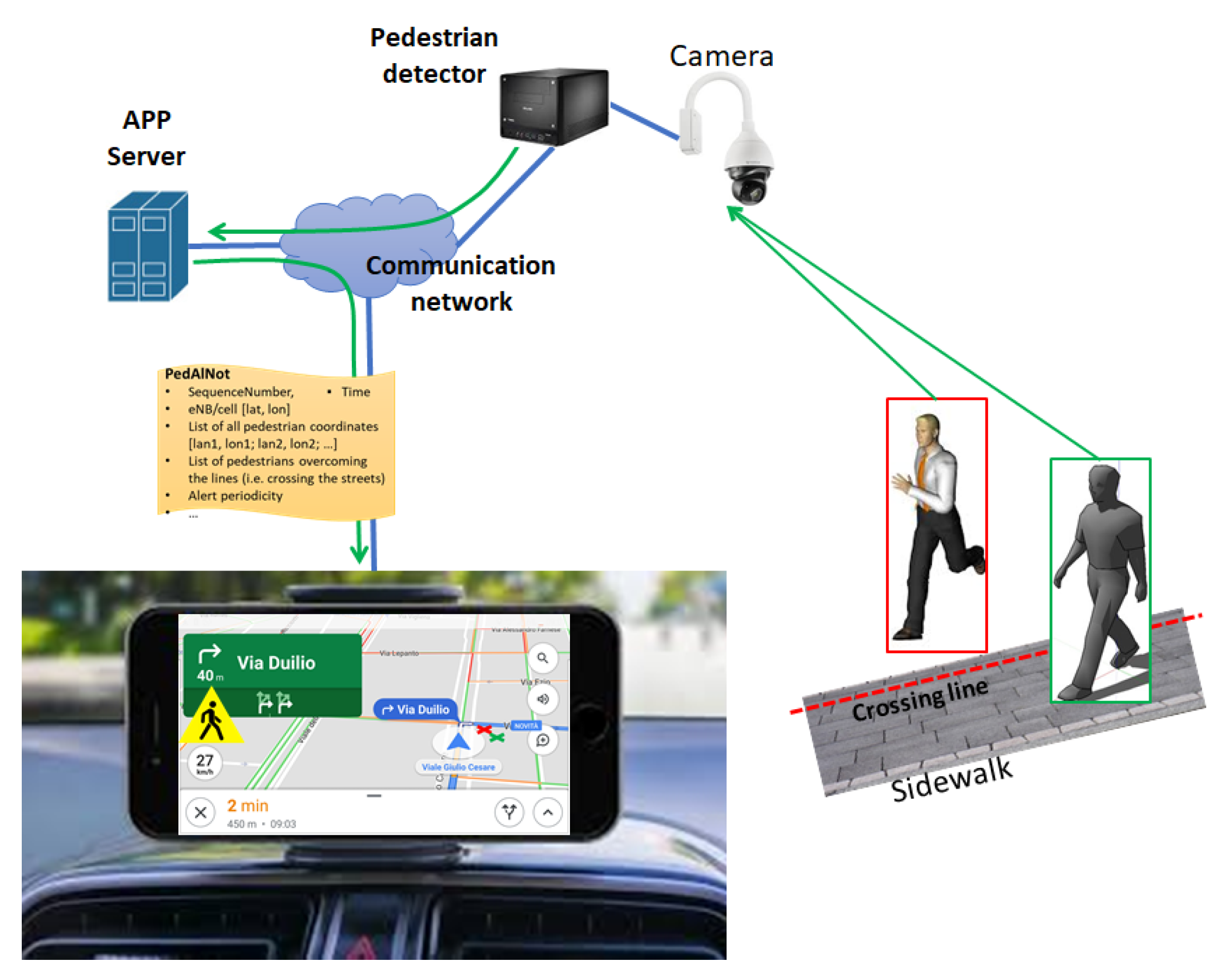
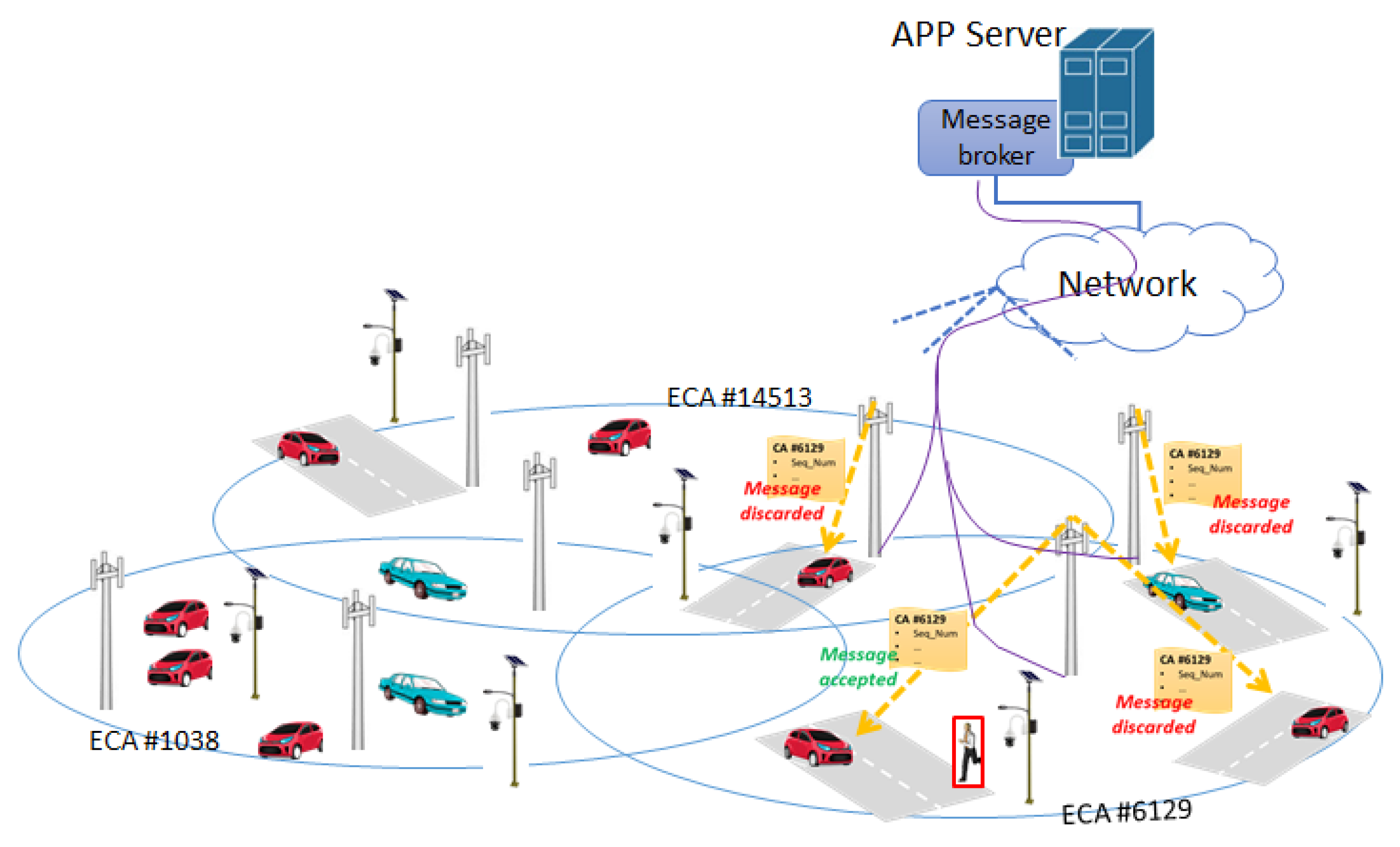
4.1. Communication Subsystem Based on Existing Warning Systems in the Mobile Networks
- Message ID: it identifies the (specific) crossroad;
- Enable/disable: it specifies if the PedAlNot is active (and the info in this message can be considered as true);
- Sequence Number: identifies variations of a PedAlNot. This number increases for each new message, so vehicles can discard the older ones;
- Time: reports the sending timestamp of the alert. Vehicles can discard old notifications, even if they are sequentially valid;
- eNB/cell antenna position coordinates: it contains the [lat, lon] coordinates of the sending cell antenna. It helps the receiver to correctly display the info;
- Number of affected areas: it provides the number of affected areas, which are included in this message. Each of them provides information on pedestrians located in that area;
- Affected area : it consists in a circular area, defined by the [lat, lon] coordinates of the center and its radius. The on-board device can discard it whether its GPS position is outside this area;
- Alerting pedestrians position coordinates of affected area : it reports the [lat, lon] coordinates of all the pedestrians, who have crossed the line and therefore are going to cross the road. Nearby pedestrians can be grouped together reporting the same position, to simplify notification;
- …
- Affected area : center and radius of this area;
- Alerting pedestrians position coordinates of affected area ;
- Alert periodicity: it reports the updating time the alert is sent. It allows to know the refresh time info.
4.2. Communication Subsystem with a Message Broker Server
- The app registers with the AS broker for subscription to the ADAS service;
- Data connection between the app and the AS broker is maintained active while the vehicle is moving. To this purpose the app periodically sends one registration update message to the AS broker. This message could include the current position, the vehicle speed as obtained by the on-board GNSS receiver.
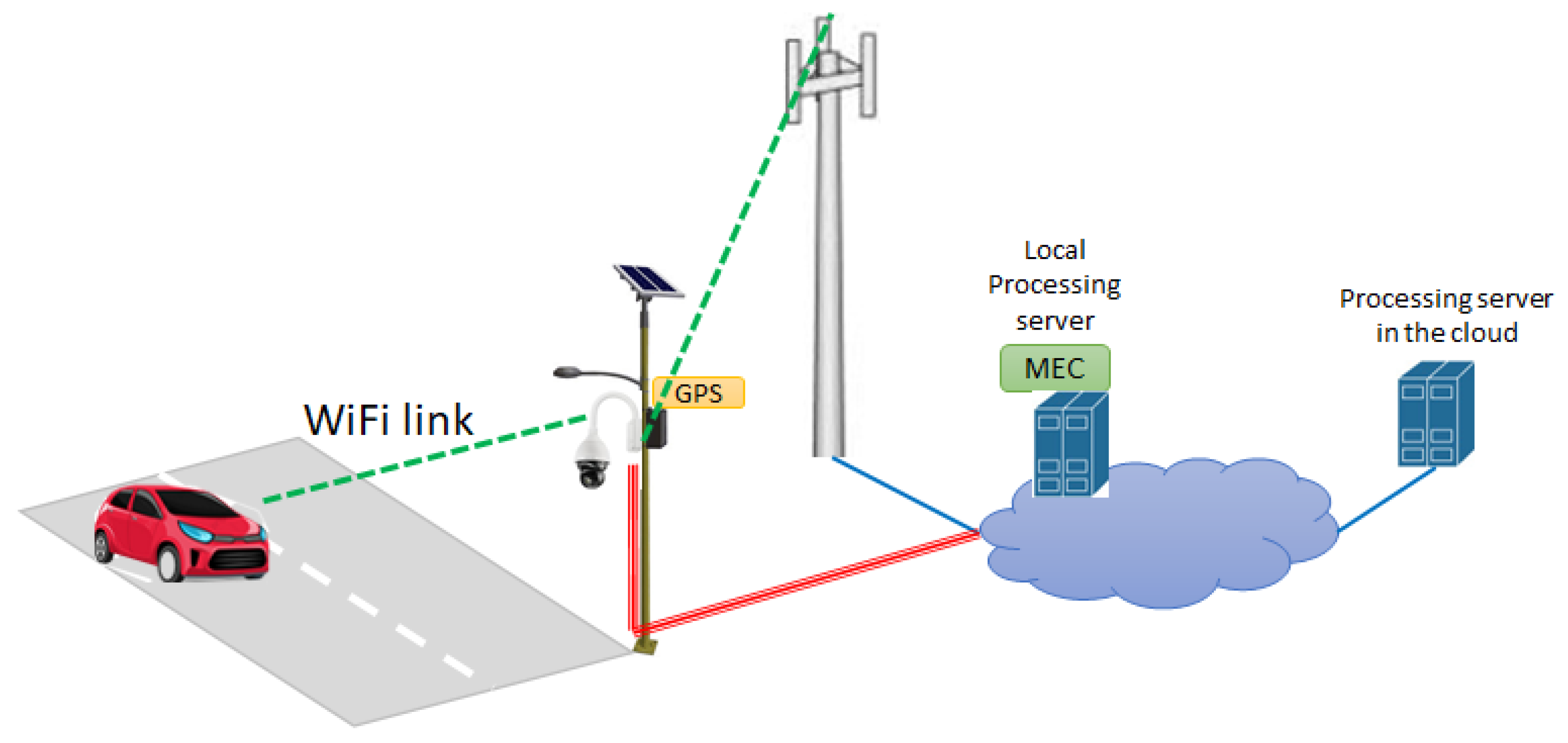
4.3. Distributed Communication Subsystem
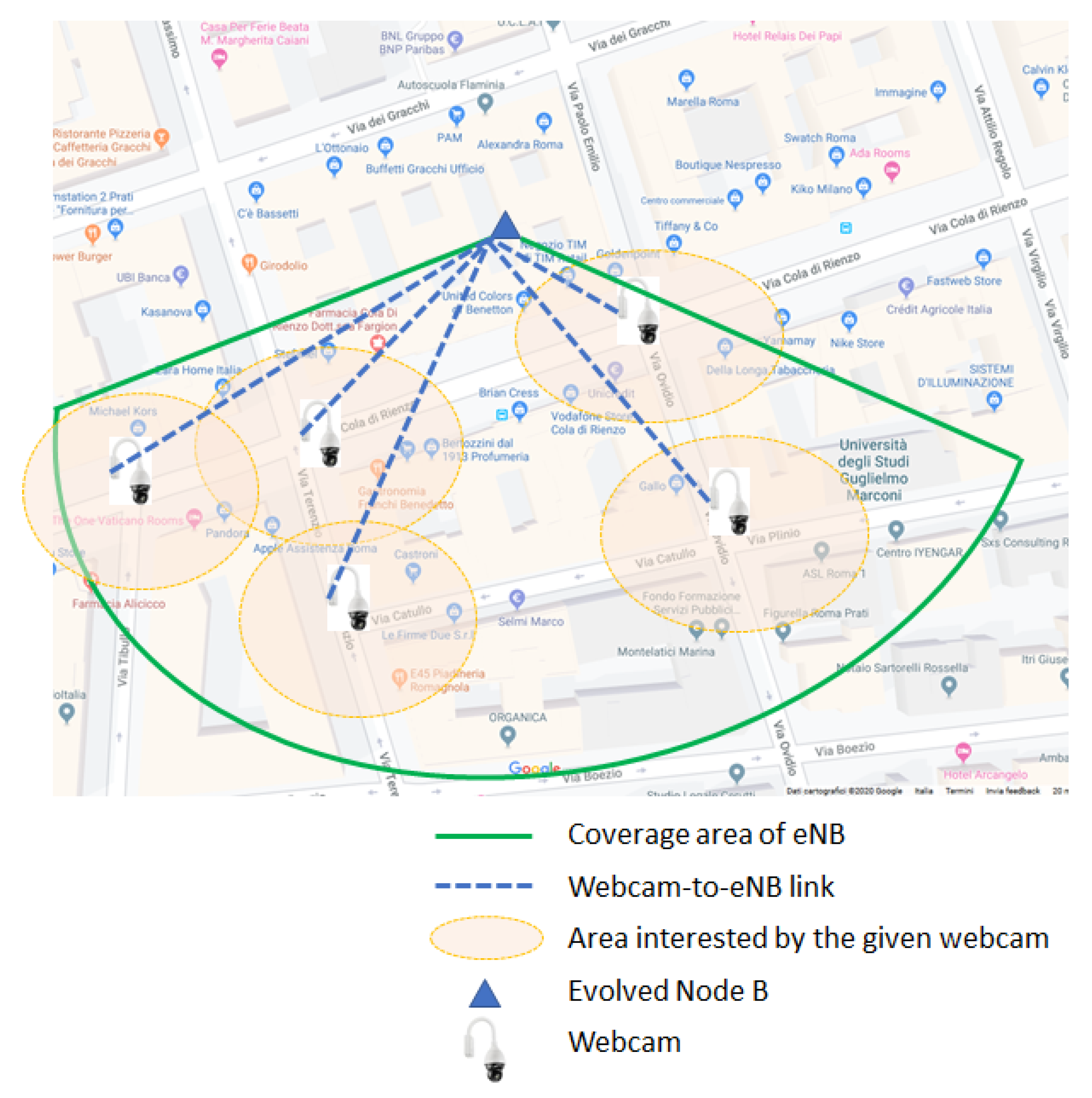
- Positions and the working status of the PDs in the ADAS service area are periodically reported and updated into an electronic map. In the PD setup phase as well as during the normal operations, the single PD notifies its position (obtained from the GNSS) to one remote server. The main purpose of this server is to update the electronic map with the positions of the cameras and to store it.
- The (updated) map is downloaded by the apps in the vehicles. Map updates can be notified in real-time by the remote server, even acting as a message broker, to all the ADAS registered apps using the mobile radio networks in the service area. As an alternative, the app periodically checks for the map updates. This last approach simplifies the entire communication system and avoids the remote server to act as a broker. Nevertheless, in this case, it is not possible to notify the update of the map (if and when necessary) in real-time. This can be limiting especially when some cameras can go out of order.
- Apps into vehicles, approaching the crossroad area monitored by a given camera, start searching for the WiFi/ 802.11p radio link used by that camera itself for transmitting the alert message; to speed up this “synchronization phase”, information on the radio channel used by the camera could be stored in the map.
- The selection of the (next) camera to connect to is carried out by the on-board app using position, speed, direction etc. of the vehicle and the downloaded map of the area.
- The available public mobile radio networks could be used to exchange the corresponding management/control messages to check the status of cameras in the ADAS service area in real-time. In this case, it is assumed cameras are equipped with the corresponding mobile radio access terminals. Public mobile radio networks could also be used for the downloading of the (updated) map in the vehicles.
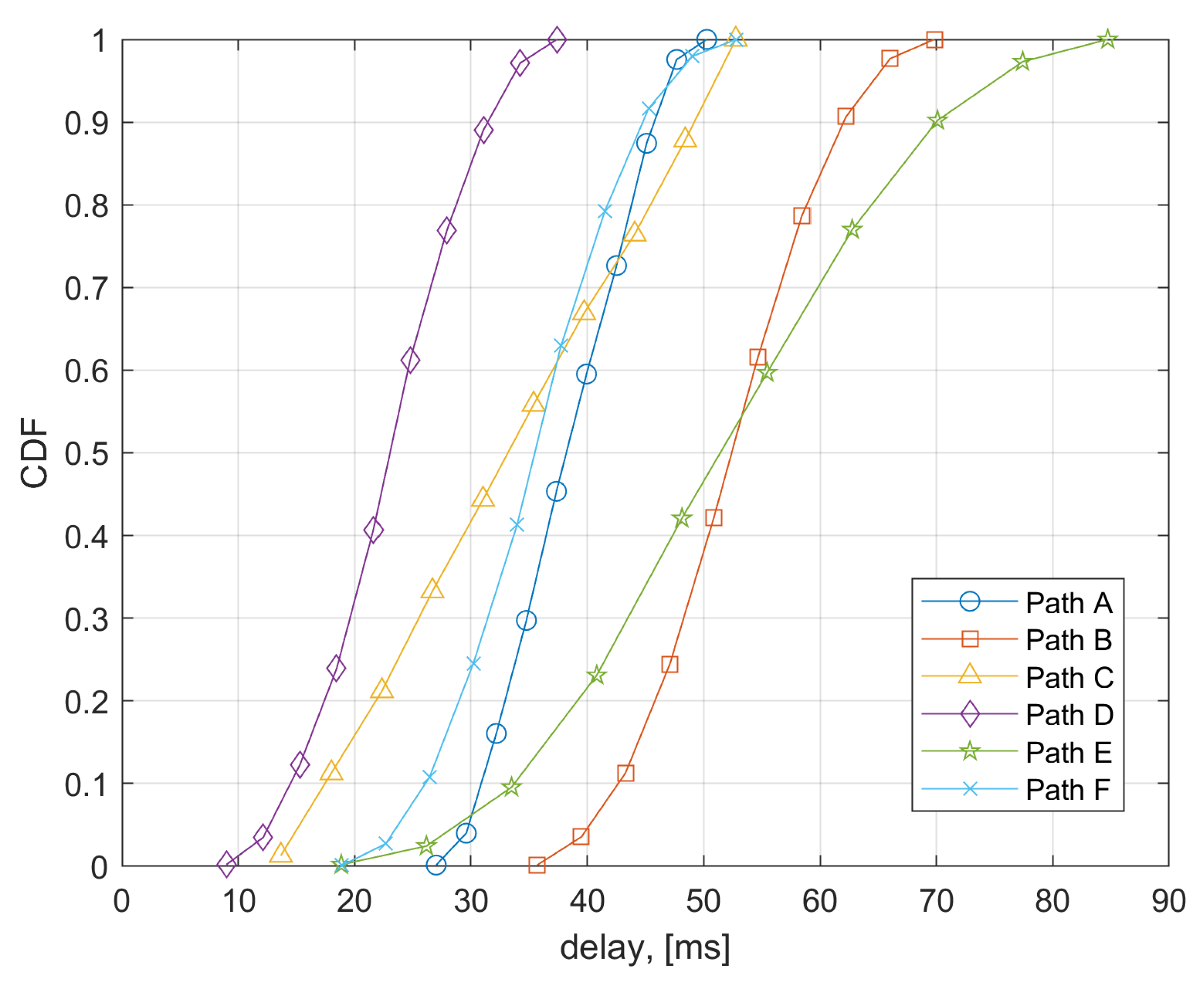
5. Latencies Performance for the Considered Communication Architectures
- processing time i.e., the time required to process the video/images from camera including the (possible) generation of the alarm message;
- communication time of the alarm i.e., the sum of the time required for sending the images to the processing server and of the time for sending (any) alarm message to the intended vehicles within the considered communication network.
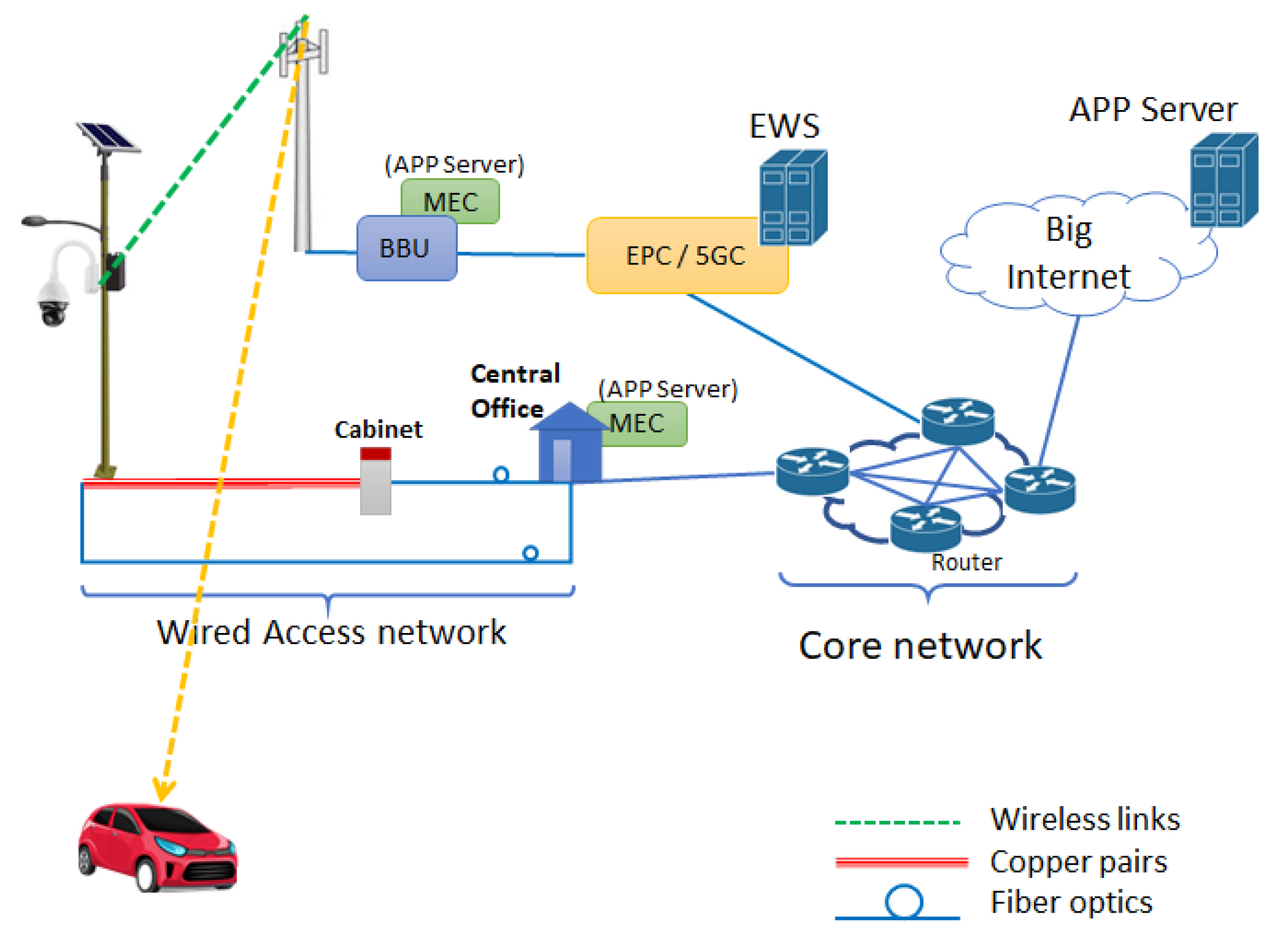
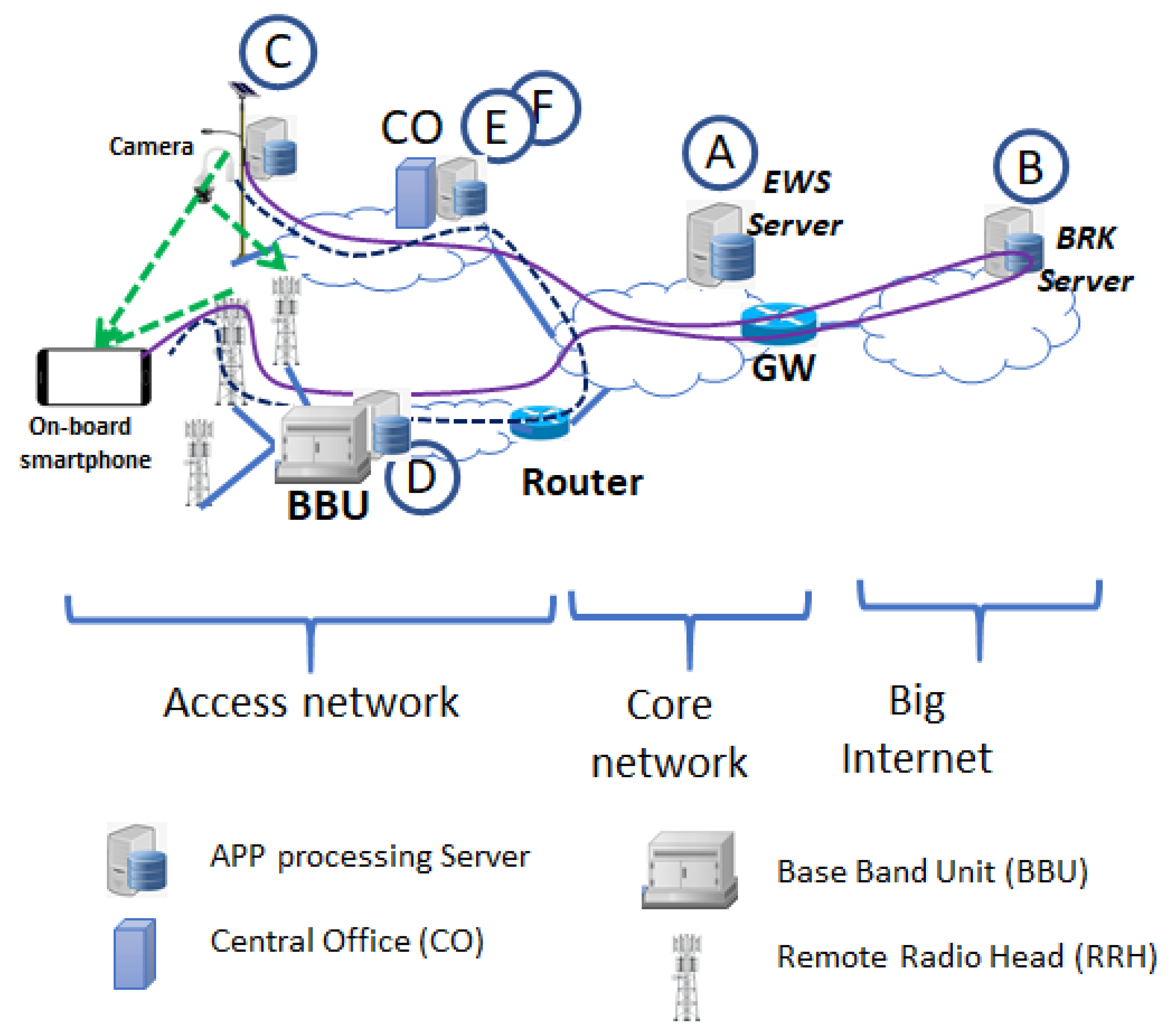
- Path A: it refers to the communication Architecture 1; images are processed to the EWS server located within the Telco network; the emergency control channels (e.g., SIB-12) is used to send the message on crossing pedestrians to the drivers. In this case the is:where is the transmission delay in the fixed access network between the camera and the central office (CO), is the delay through the core network (i.e., from CO to EWS server). is the time needed to cross the wireless access section from the delimiting router to the Base Band Unit (BBU). is the time for transmission from the BBU to the on-board terminal. It accounts for signal processing functionalities at the BBU and inside the user terminal and it includes the scheduling time in the eNB as well as the frame alignment. We considered this time can vary between a minimum and a maximum depending on the communication access technologies. Finally, is the processing time for the on-board app to process the alarm message and to visualize information to the driver on the screen.
- Path B: it refers to the communication Architecture 2; images are processed in the BROKER server located in the Internet (i.e., outside the Telco network). In this case is:The in (2) is similar to in (1) except for the additional time required to traverse (twice) the internet to reach the message broker server and to return at the entry point of the wireless access network. In this case, the time in the air interface is higher than in (1) (see also Table 1) because the alarm message is sent to the drivers using the user channels, i.e., in this case the emergency service provided by the Telco for sending the alarm is not considered.
- Path C: it refers to the communication Architecture 3; images are processed locally. In this case is:where is the time required for the connection between the camera and the Wi-Fi modem, and is the time to transmit the alarm to the intended driver through the Wi-Fi link.
- Path D: it refers to the communication Architecture 2 including MEC; images are processed inside the MEC located in the BBU. In this case, the camera is connected to the eNB to send images to the server in the MEC and is:The alarm is sent to the intended driver using the eNB of the cellular system. Even in this case, we assume that eNB downlink data channel is used to send the alarm.
- Path E: it refers to a variation of the communication Architecture 3; images are processed in the MEC located in the CO (i.e., in the wired access network). In this case, is:The is the time interval required to send back the alarm through the wired access network, before the Wi-Fi access point.
- Path F: it refers to Architecture 2; the processing server is located in the MEC inside the CO. Alarms are sent to the intended driver through the eNBs of the wireless access network. In this case, the is:Even in this case, eNB downlink data channels are used to send the alarm.
| EWS = ms | EDGE = ms |
| BROKER = ms | WiFi-EDGE = ms |
| LOCAL = ms | EDGE fxd/wirel ntw = ms |
6. Subsystem for Detection of Crossing Pedestrians
6.1. Pedestrian Detector Subsystem
- Bounding box prediction: K-Means clustering algorithm [28] is used to find good priors instead of hand-picking them. The distance between centroids of found clusters is calculated using Intersection Over Union (IOU), which is independent of the size of the box. This approach leads to a lower error compared to the standard Euclidean Distance measure [29]. In addition, the latest versions of YOLO (i.e., v5 at the writing of this paper) use self-learning methods to derive most suitable anchor boxes for the input training data. By the means of logistic regression, YOLO predicts an objectness score to each bounding box.
- Class prediction: every bounding box also predicts the classes that may contain. To achieve it, a multilabel classifier is used, whose main goal is to make prediction of the class type the object belongs to. YOLO predicts boxes using three different scales, ending up with a 3D tensor in the form of , where 4 are the bounding box offsets, 1 is the objectness prediction and 80 are the class predictions.
- Feature extraction: YOLOv3 network uses successive and convolutional layers. Compared to that of the previous releases of the same network, this version is significantly larger and takes advantages from residual network technology. Residual networks offer the possibility to skip connections or jump over some layers improving the overall speed and accuracy. YOLOv5 further improves the feature extraction stage by using Cross Stage Partial (CSP) network as backbone [30]. CSP models are based on DenseNet [31], which are designed to address common CNN problems, such as vanishing gradient.
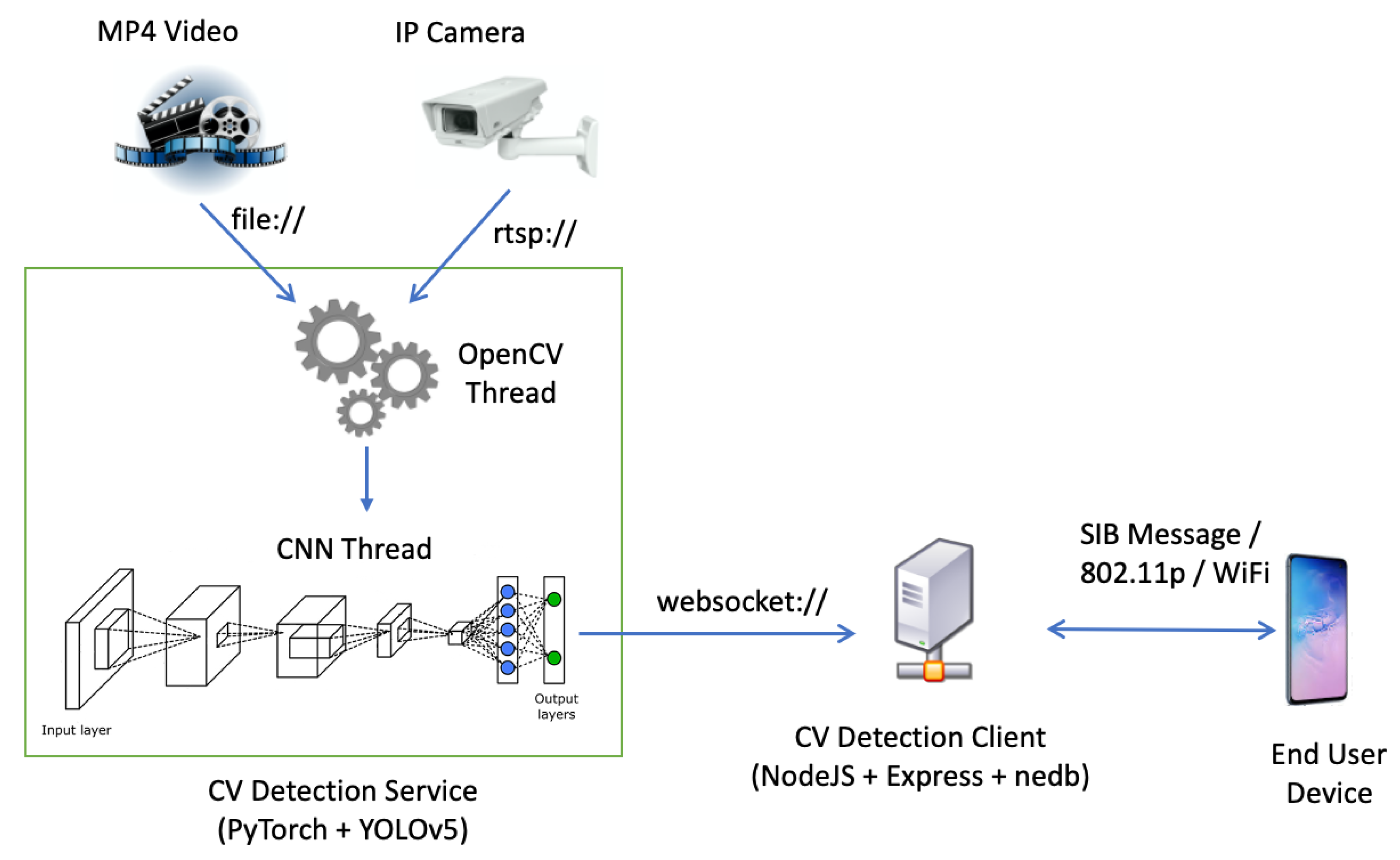
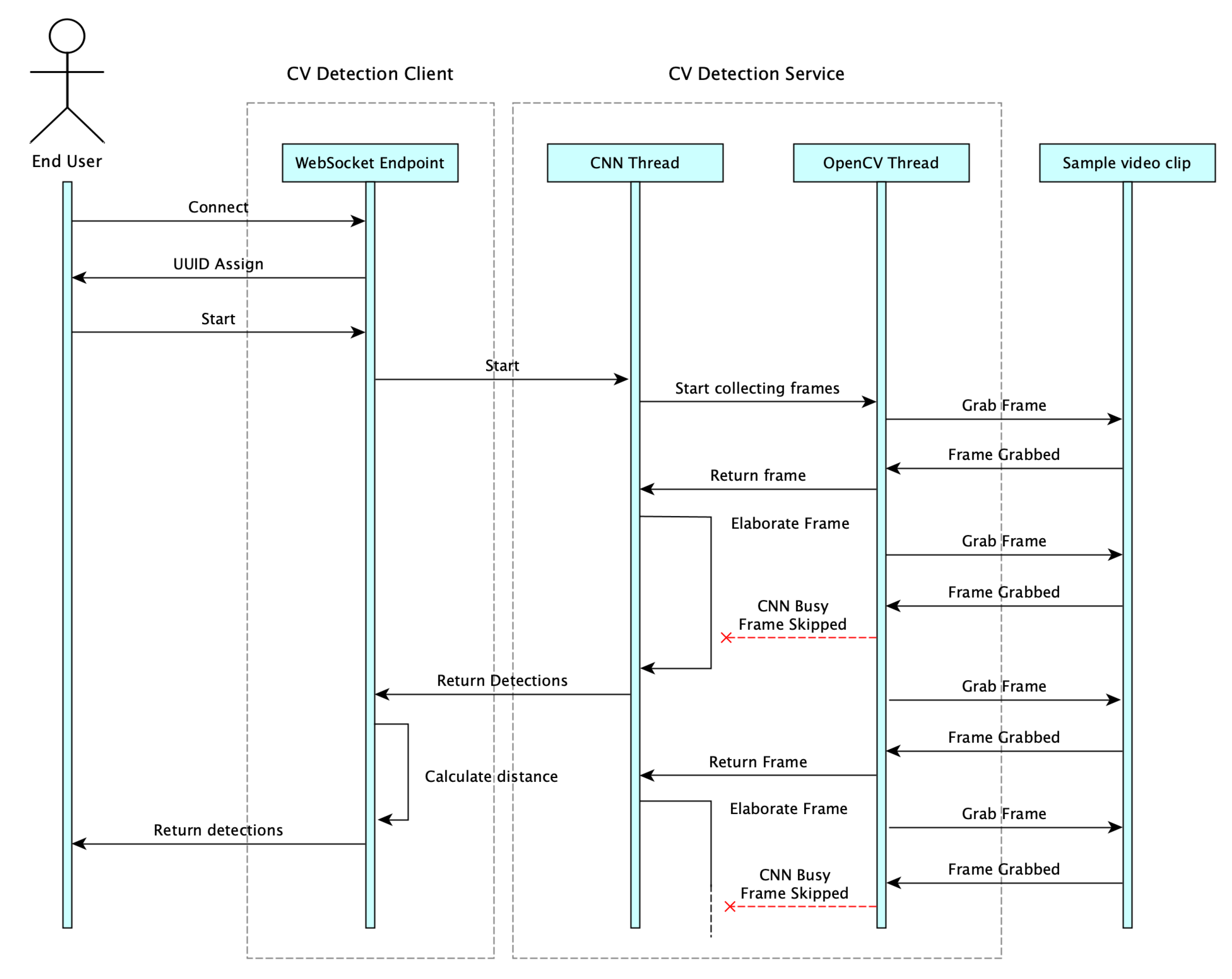
6.2. Pedestrian Detector: Testbed Implementation
6.3. Performance Metrics for Pedestrian Detector
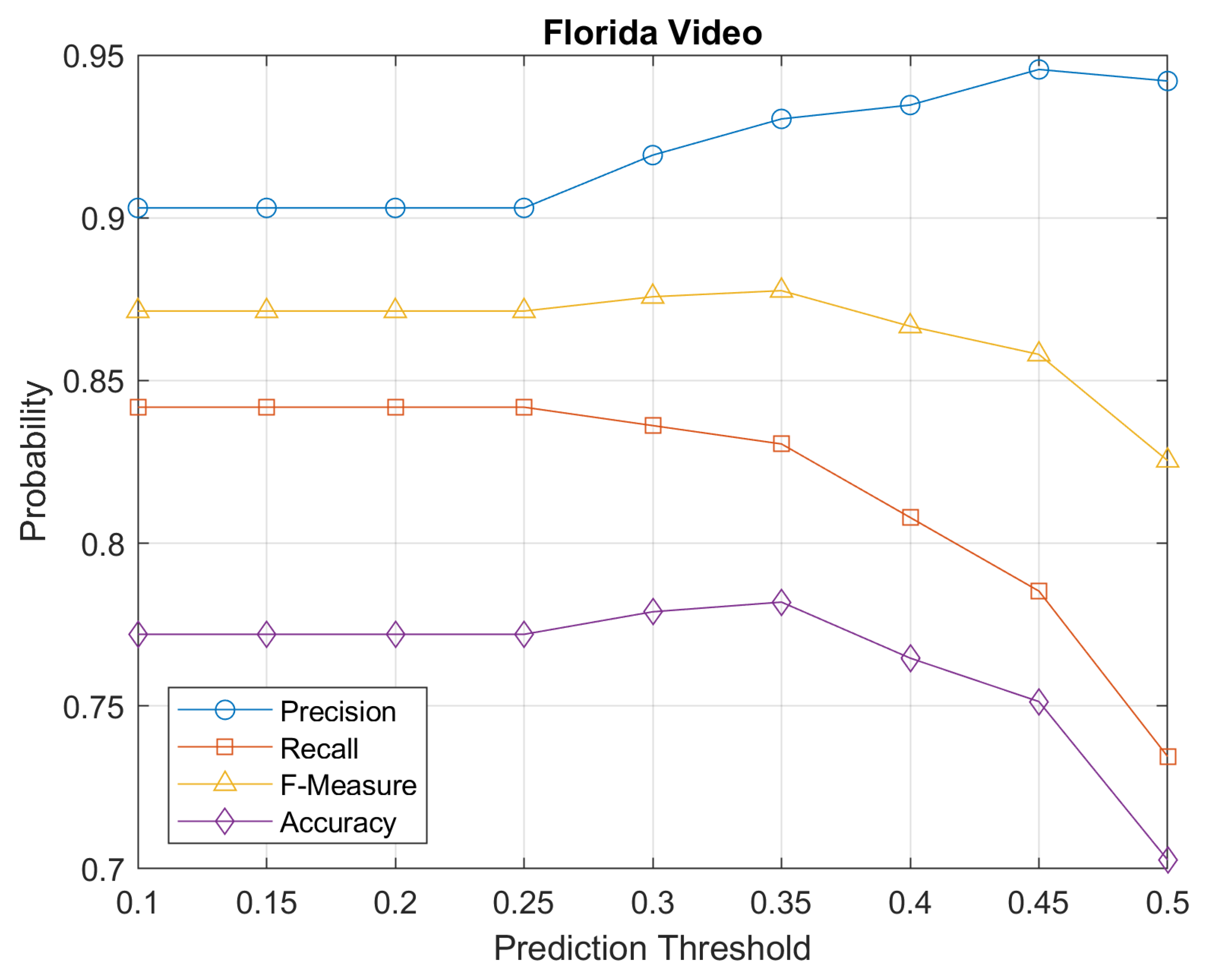
6.4. Performance Results for Pedestrian Detector
- Intel Xeon —1225, 4 core, GHz processor
- 8 GByte RAM 1600 MHz DDR3
- GPU Nvidia GeForce RTX 3060 12 GByte RAM
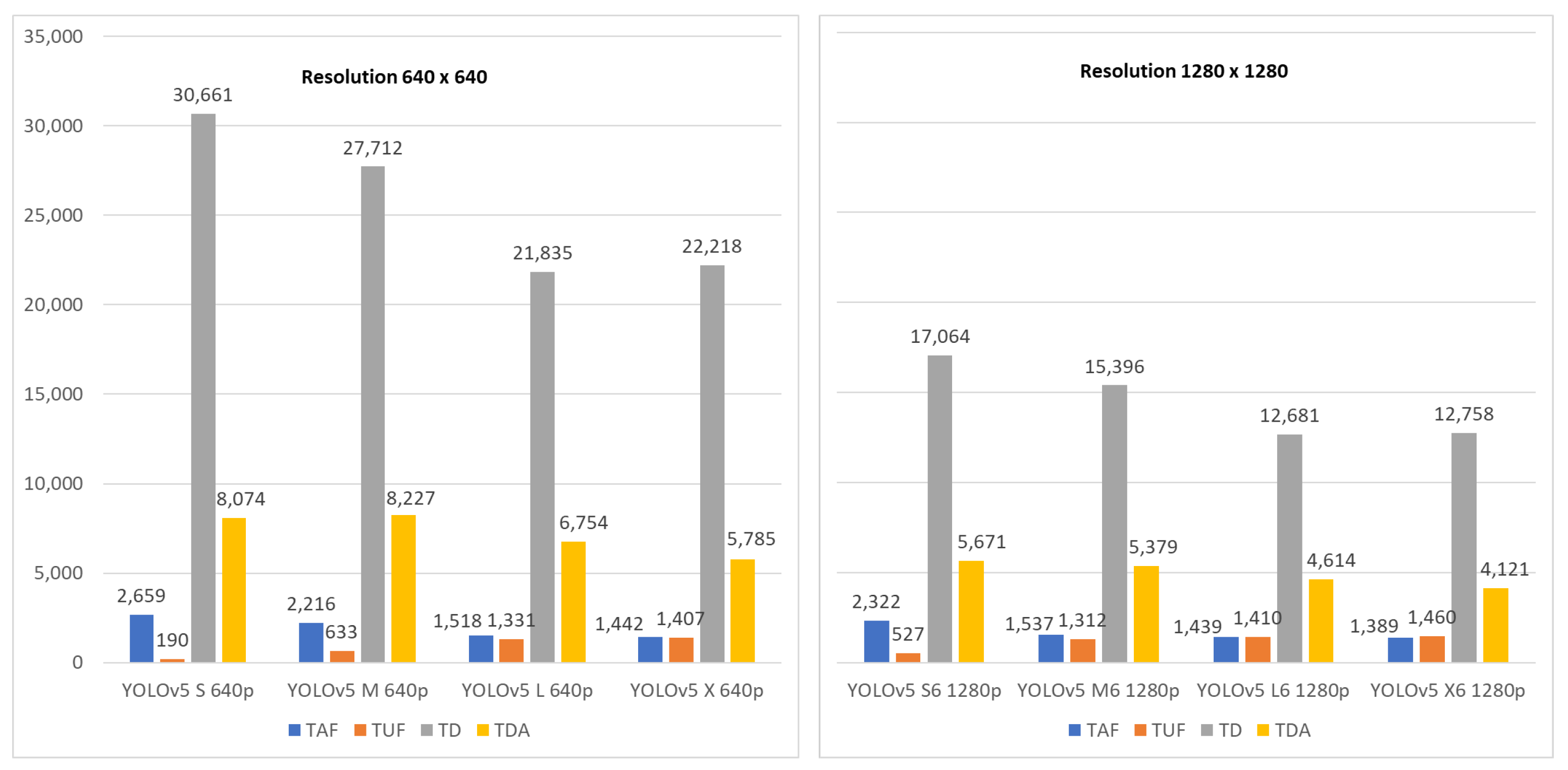
- Total Analyzed Frames (TAF), corresponding to the number of frames that have passed to the YOLO CNN;
- Total Unprocessed frames (TUF), corresponding to the number of non-analyzed frame or lost frames (i.e., it accounts for frames that were skipped because the YOLO CNN was busy); this is the difference between the total number of frames in the clip equal to 2849 in the considered video clip and the TAF;
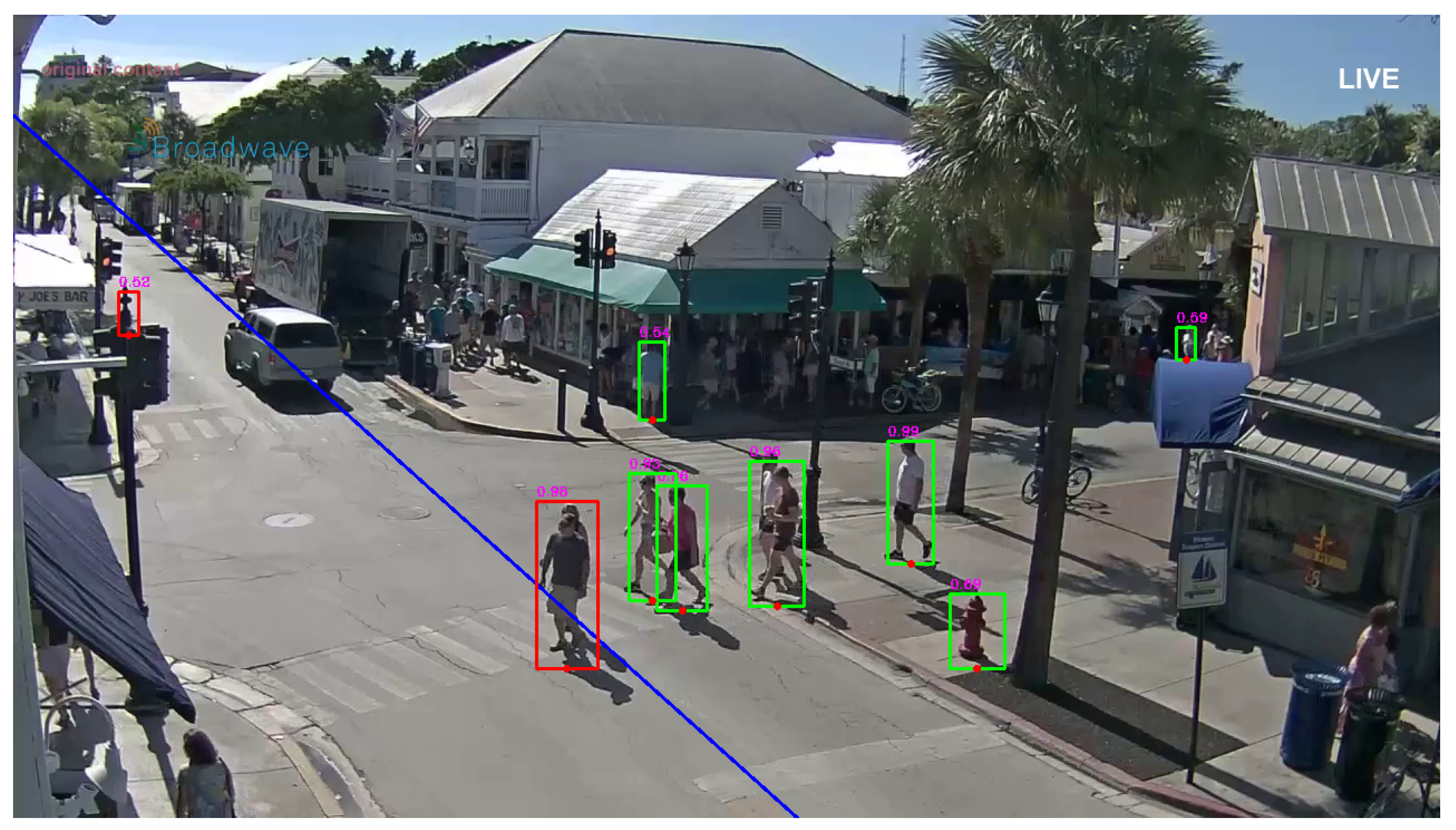
- Total pedestrian Detections (TD), counting the bounding boxes returned by the CNN in the unit of time;
- Total Detections in Alarm zone (TDA), counting the number of bounding boxes in alarm state, i.e., red bounding boxes.
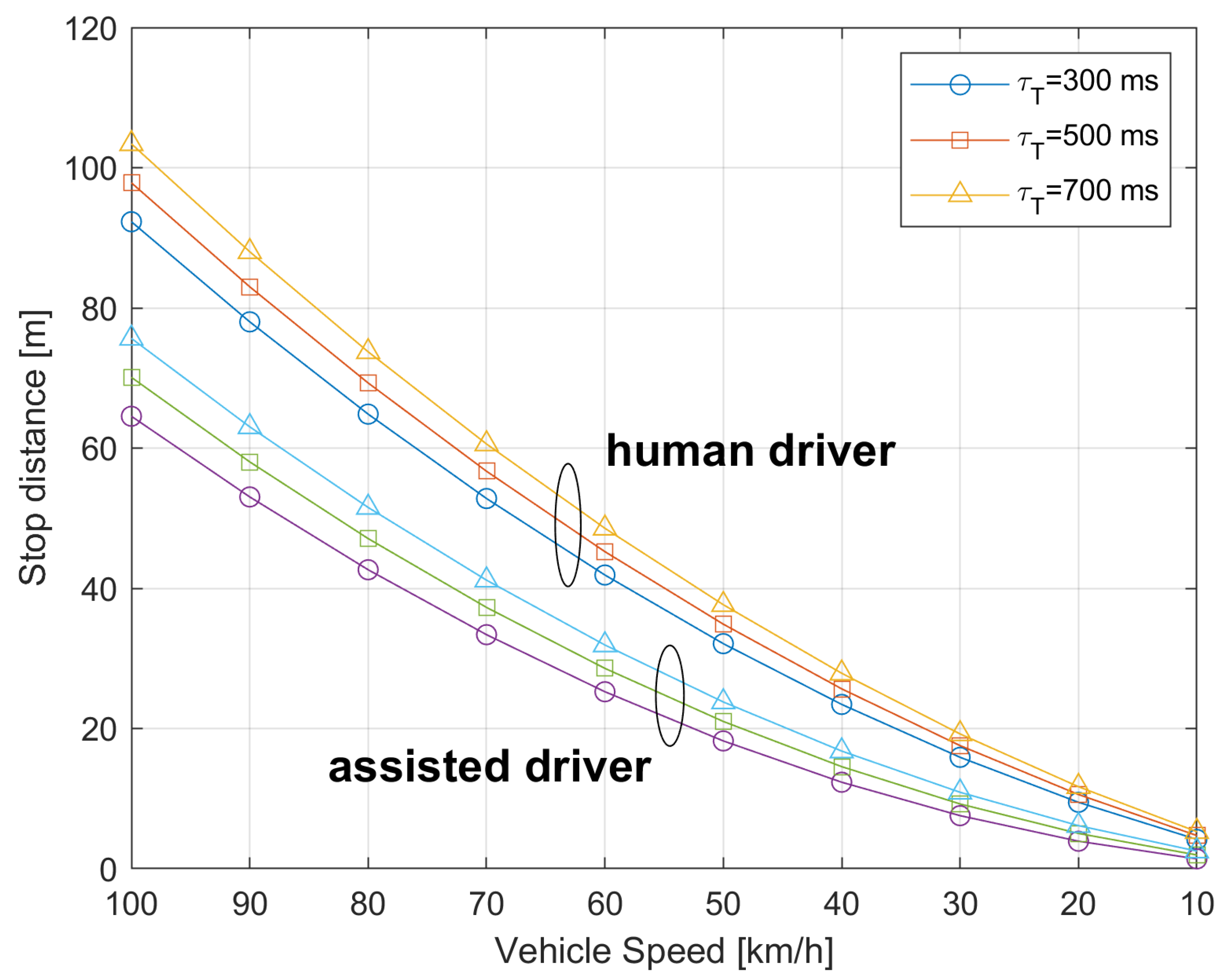
7. ADAS Iatency and Braking Curve for the Vehicle
8. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
References
- Wang, J.; Li, X.; Liao, S.S.; Hua, Z. A Hybrid Approach for Automatic Incident Detection. IEEE Trans. Intell. Transp. Syst. 2013, 14, 1176–1185. [Google Scholar] [CrossRef]
- Dinakaran, R.K.; Easom, P.; Bouridane, A.; Zhang, L.; Jiang, R.; Mehboob, F.; Rauf, A. Deep Learning Based Pedestrian Detection at Distance in Smart Cities. Intell. Syst. Appl. Conf. 2019, 1038, 588–593. [Google Scholar]
- Jeong, M.; Ko, B.C.; Nam, J.-Y. Early Detection of Sudden Pedestrian Crossing for Safe Driving During Summer Nights. IEEE Trans. Circuits Syst. Video Technol. 2017, 27, 1368–1380. [Google Scholar] [CrossRef]
- Goma, J.C.D.; Ammuyutan, L.A.B.; Capulong, H.L.S.; Naranjo, K.P.; Devaraj, M. Vehicular Obstruction Detection In The Zebra Lane Using Computer Vision. In Proceedings of the IEEE 6th International Conference on Industrial Engineering and Applications (ICIEA), Tokyo, Japan, 26–29 April 2019; pp. 362–366. [Google Scholar]
- Gong, L.; Hong, W.; Wang, J. Pedestrian detection algorithm based on integral channel features. In Proceedings of the 2018 Chinese Control And Decision Conference (CCDC), Shenyang, China, 9–11 June 2018; pp. 941–946. [Google Scholar]
- Hariyono, J.; Jo, K. Detection of pedestrian crossing road. In Proceedings of the IEEE International Conference on Image Processing (ICIP), Quebec City, QC, Canada, 27–30 September 2015; pp. 4585–4588. [Google Scholar]
- Bochkovskiy, A.; Wang, C.-Y.; Liao, H.-Y.M. YOLOv4: Optimal Speed and Accuracy of Object Detection. arXiv 2020, arXiv:2004.10934. [Google Scholar]
- Emergency Alert and Warning Systems: Current Knowledge and Future Research Directions; National Academies of Sciences, Engineering, and Medicine: Washington, DC, USA, 2018.
- Varghese, F.; George, L. Traffic Violation Detection System: Traffic Enforcement System. J. Emerg. Technol. Innov. Res. 2017, 4, 92–95. [Google Scholar]
- Vermeulen, E. Automatic Incident Detection (AID) with thermal cameras. In Proceedings of the Road Transport Information and Control Conference 2014 (RTIC 2014), London, UK, 6–7 October 2014; pp. 1–5. [Google Scholar]
- Abuelela, M.; Olariu, S.; Cetin, M.; Rawat, D. Enhancing Automatic Incident Detection Using Vehicular Communications. In Proceedings of the 70th IEEE Vehicular Technology Conference Fall (VTC2009), Anchorage, AK, USA, 20–23 September 2009; pp. 1–5. [Google Scholar]
- Popescu, O.; Sha-Mohammad, S.; Abdel-Wahab, H.; Popescu, D.C.; El-Tawab, S. Automatic Incident Detection in Intelligent Transportation Systems Using Aggregation of Traffic Parameters Collected Through V2I Communications. IEEE Intell. Transp. Syst. Mag. 2017, 3, 64–75. [Google Scholar] [CrossRef]
- Rasouli, A.; Kotseruba, I.; Tsotsos, J.K. Understanding pedestrian behavior in complex traffic scenes. IEEE Trans. Intell. Veh. 2018, 3, 61–70. [Google Scholar] [CrossRef]
- Rasouli, A.; Kotseruba, I.; Tsotsos, J.K. Are they going to cross? A benchmark dataset and baseline for pedestrian crosswalk behavior. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Venice, Italy, 22–29 October 2017; pp. 206–213. [Google Scholar]
- Ridel, D.; Rehder, E.; Lauer, M.; Stiller, C.; Wolf, D. A literature review on the prediction of pedestrian behavior in urban scenarios. In Proceedings of the International Conference on Intelligent Transportation Systems (ITSC), Maui, HI, USA, 4–7 November 2018; pp. 3105–3112. [Google Scholar]
- Lorenzo, J.; Parra, I.; Wirth, F.; Stiller, C.; Llorca, D.F.; Sotelo, M.A. RNN-based Pedestrian Crossing Prediction using Activity and Pose-related Features. In Proceedings of the 2020 IEEE Intelligent Vehicles Symposium (IV), Las Vegas, NV, USA, 23–26 June 2020; pp. 1801–1806. [Google Scholar]
- Xu, Y.; Xu, D.; Lin, S.; Han, T.X.; Cao, X.; Li, X. Detection of Sudden Pedestrian Crossings for Driving Assistance Systems. IEEE Trans. Syst. Man Cybern. Part B Cybern. 2012, 42, 729–739. [Google Scholar]
- Furuhashi, R.; Yamada, K. Estimation of Street Crossing Intention from a Pedestrian’s Posture on a Sidewalk Using Multiple Image Frames. In Proceedings of the First Asian Conference on Pattern Recognition, Beijing, China, 28 November 2011; pp. 17–21. [Google Scholar]
- Dominguez-Sanchez, A.; Cazorla, M.; Orts-Escolano, S. Pedestrian Movement Direction Recognition Using Convolutional Neural Networks. IEEE Trans. Intell. Transp. Syst. 2017, 18, 3540–3548. [Google Scholar] [CrossRef] [Green Version]
- Zhang, H.; Pop, D.O.; Rogozan, A.; Bensrhair, A. Accelerate High Resolution Image Pedestrian Detection With Non-Pedestrian Area Estimation. IEEE Access 2021, 9, 8625–8636. [Google Scholar] [CrossRef]
- Holma, H.; Toskala, A.; Nakamura, T. 5G Technology: 3GPP New Radio, 1st ed.; John Wiley & Sons Ltd.: Hoboken, NJ, USA, 2020. [Google Scholar]
- Ciccarella, G.; Giuliano, R.; Mazzenga, F.; Vatalaro, F.; Vizzarri, A. Edge cloud computing in telecommunications: Case studies on performance improvement and TCO saving. In Proceedings of the IEEE International Conference Fog Mobile Edge Computing (FMEC 2019), Rome, Italy, 10–13 June 2019; pp. 113–120. [Google Scholar]
- Mao, H.; Yao, S.; Tang, T.; Li, B.; Yao, J.; Wang, Y. Towards Real-Time Object Detection on Embedded Systems. IEEE Trans. Emerg. Top. Comput. 2018, 6, 417–431. [Google Scholar] [CrossRef]
- Dosovitskiy, A.; Fischer, P.; Springenberg, J.T.; Riedmiller, M.; Brox, T. Discriminative Unsupervised Feature Learning with Exemplar Convolutional Neural Networks. IEEE Trans. Pattern Anal. Mach. Intell. 2016, 38, 1734–1747. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Liu, W.; Anguelov, D.; Erhan, D.; Szegedy, C.; Reed, S.; Fu, C.-Y.; Berg, A. SSD: Single Shot MultiBox Detector. Eur. Conf. Comput. Vis. 2016, 9905, 21–37. [Google Scholar]
- Dinakaran, R.; Sexton, G.; Seker, H.; Bouridane, A.; Jiang, R. Image resolution impact analysis on pedestrian detection in smart cities surveillance. In Proceedings of the 1st International Conference on Internet of Things and Machine Learning (IML’17), 17–18 October 2017; pp. 1–8. [Google Scholar]
- Lin, T.-Y.; Maire, M.; Belongie, S.; Bourdev, L.; Girshick, R.; Hays, J.; Perona, P.; Ramanan, D.; Zitnick, C.L.; Dollár, P. Microsoft COCO: Common Objects in Context. May 2014. Available online: https://arxiv.org/abs/1405.0312 (accessed on 15 October 2021).
- Mahdavinejad, M.S.; Rezvan, M.; Barekatain, M.; Adibi, P.; Barnaghi, P.; Sheth, A.P. Machine learning for internet of things data analysis: A survey. Digit. Commun. Netw. 2018, 4, 161–175. [Google Scholar] [CrossRef]
- Redmon, J.; Farhadi, A. YOLO9000: Better, Faster, Stronger. arXiv 2016, arXiv:1612.08242. [Google Scholar]
- Wang, C.-Y.; Liao, H.-Y.M.; Yeh, I.; Wu, Y.-H.; Chen, P.-Y.; Hsieh, J.-W. CSPNet: A New Backbone that can Enhance Learning Capability of CNN. arXiv 2019, arXiv:1911.11929. [Google Scholar]
- Huang, G.; Liu, Z.; van der Maaten, L.; Weinberger, K.Q. Densely Connected Convolutional Networks. arXiv 2018, arXiv:1608.06993. [Google Scholar]
- Keith, J. Digital Video and DSP; Elsevier: Amsterdam, The Netherlands, 2008. [Google Scholar]
- Henry, M. Video Compression Explained. 23 January 2010. Available online: Https://www.lensrentals.com/blog/2010/01/video-compression-explained/ (accessed on 6 October 2021).
- Girolamo, C.D. Factors Influencing Driving: Safety Distance and Reaction Time. Available online: https://www.biomeccanicaforense.com/i-fattori-che-influenzano-la-guida.html (accessed on 10 October 2021). (In Italian).
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Architecture 1 | Architecture 2 | Architecture 3 | ||||
| (Server EWS) | (Server BRK) | (Local Processing) | ||||
| LINKS | Path A | Path B | Path C | |||
| min | max | min | max | min | max | |
| APP processing | 2 | 5 | 2 | 5 | 2 | 5 |
| Cam-WiFi | 1 | 2 | ||||
| WiFi-APP | 10 | 50 | ||||
| Wired Access (cam-CO) | 2 | 20 | 2 | 20 | ||
| Wired Access (CO-WiFi) | ||||||
| Core Nwk (CO-EWS/ | 8 | 10 | 8 | 10 | ||
| CO-GW/CO-router) | ||||||
| Core Nwk-Wireless Access | 8 | 10 | 8 | 10 | ||
| (EWS-router/GW-router) | ||||||
| Wireless Access (router-BBU) | 2 | 5 | 2 | 5 | ||
| Air Interface DL (BBU-APP) | 3 | 4.5 | 3 | 18 | ||
| Air Interface UL (cam-BBU) | ||||||
| Internet (GW-BRK) | 3 | 5 | ||||
| Internet (BRK-GW) | 3 | 5 | ||||
| Total [ms] | 25 | 54.5 | 31 | 78 | 13 | 57 |
| Architecture 2 | Architecture 3 | Architecture 2 | ||||
| (MEC @BBU) | (MEC @CO, | (MEC @CO, Fixed/ | ||||
| Wi-Fi EDGE) | Mobile nw) | |||||
| LINKS | Path D | Path E | Path F | |||
| min | max | min | max | min | max | |
| APP processing | 2 | 5 | 2 | 5 | 2 | 5 |
| Cam-WiFi | ||||||
| WiFi-APP | 10 | 50 | ||||
| Wired Access (cam-CO) | 2 | 20 | 2 | 20 | ||
| Wired Access (CO-WiFi) | 2 | 20 | ||||
| Core Nwk (CO-EWS/ | 8 | 10 | ||||
| CO-GW/CO-router) | ||||||
| Core Nwk-Wireless Access | ||||||
| (EWS-router/GW-router) | ||||||
| Wireless Access (router-BBU) | 2 | 5 | ||||
| Air Interface DL (BBU-APP) | 3 | 18 | 3 | 18 | ||
| Air Interface UL (cam-BBU) | 3 | 18 | ||||
| Internet (GW-BRK) | ||||||
| Internet (BRK-GW) | ||||||
| Total [ms] | 8 | 41 | 16 | 95 | 17 | 58 |
| Clip Name | # Frames | # Samples | TP | FP | FN | TN |
| Simple scenarios | ||||||
| Left | 1550 | 31 | 12 | 0 | 0 | 0 |
| Zebra Crossing | 1400 | 28 | 29 | 1 | 0 | 0 |
| Right | 3150 | 63 | 91 | 2 | 7 | 0 |
| Multiple Directions | 1850 | 37 | 84 | 0 | 5 | 0 |
| Real-life scenarios | ||||||
| Florida | 2849 | 57 | 130 | 8 | 47 | 0 |
| Av. Do Mar | 2757 | 56 | 141 | 4 | 17 | 0 |
| Rome | 3406 | 69 | 361 | 3 | 11 | 0 |
| Clip Name | Precision | Recall | F-Measure | Accuracy | ||
| Simple scenarios | ||||||
| Left | 1.00 | 1.00 | 1.00 | 1.00 | ||
| Zebra Crossing | 0.97 | 1.00 | 0.98 | 0.97 | ||
| Right | 0.98 | 0.93 | 0.95 | 0.91 | ||
| Multiple Directions | 1.00 | 0.94 | 0.97 | 0.94 | ||
| Real-life scenarios | ||||||
| Florida | 0.94 | 0.74 | 0.83 | 0.70 | ||
| Av. Do Mar | 0.97 | 0.89 | 0.93 | 0.87 | ||
| Rome | 0.99 | 0.97 | 0.98 | 0.96 | ||
| (a) fps = 30 [1/s] | ||||
| Bit Rate, | Compression | Bit Rate, | ||
| Uncoded [kbit/s] | Factor | Compressed [kbit/s] | ||
| YOLOv5 | 393,216.00 | 200 | 1966.08 | |
| YOLOv5 | 221,184.00 | 150 | 1474.56 | |
| YOLOv5 | 65,280.00 | 100 | 652.80 | |
| (b) Variable fps (According Yolo Processing Capabilities) | ||||
| Variable | Bit Rate, | Compression | Bit Rate, | |
| fps | Uncoded [kbit/s] | Factor | Compressed [kbit/s] | |
| YOLOv5 | 27 | 353,894.40 | 200 | 1769.47 |
| YOLOv5 | 27 | 199,065.60 | 200 | 995.33 |
| YOLOv5 | 27 | 58,752.00 | 200 | 293.76 |
| YOLOv5 | 14 | 183,500.80 | 150 | 1223.34 |
| YOLOv5 | 14 | 103,219.20 | 150 | 688.13 |
| YOLOv5 | 14 | 30,464.00 | 150 | 203.09 |
| YOLOv5 | 7 | 91,750.40 | 100 | 917.50 |
| YOLOv5 | 7 | 51,609.60 | 100 | 516.10 |
| YOLOv5 | 7 | 15,232.00 | 100 | 152.32 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Giuliano, R.; Mazzenga, F.; Innocenti, E.; Fallucchi, F.; Habib, I. Communication Network Architectures for Driver Assistance Systems. Sensors 2021, 21, 6867. https://doi.org/10.3390/s21206867
Giuliano R, Mazzenga F, Innocenti E, Fallucchi F, Habib I. Communication Network Architectures for Driver Assistance Systems. Sensors. 2021; 21(20):6867. https://doi.org/10.3390/s21206867
Chicago/Turabian StyleGiuliano, Romeo, Franco Mazzenga, Eros Innocenti, Francesca Fallucchi, and Ibrahim Habib. 2021. "Communication Network Architectures for Driver Assistance Systems" Sensors 21, no. 20: 6867. https://doi.org/10.3390/s21206867
APA StyleGiuliano, R., Mazzenga, F., Innocenti, E., Fallucchi, F., & Habib, I. (2021). Communication Network Architectures for Driver Assistance Systems. Sensors, 21(20), 6867. https://doi.org/10.3390/s21206867