
Event Detection for Distributed Acoustic Sensing: Combining Knowledge-Based, Classical Machine Learning, and Deep Learning Approaches

Abstract
:1. Introduction
2. Materials and Methods
2.1. Distributed Acoustic-Optical Sensors
2.2. Signal Processing and Machine Learning for DAS Event Detection
2.2.1. Feature Selection and Extraction
- Time features: time energy distribution (TE), principal component analysis (PCA), and correlation-based features;
- Frequency features: fast Fourier transform (FFT), short-time fast Fourier transform (STFT), and cepstral coefficients (CC);
- Time-frequency features: continuous wavelet transform (CWT), discrete wavelet transform (DWT), and wavelet packet transform (WPT).
2.2.2. Feature Classification: Machine Learning Algorithms
- Decision trees are (tree-like) graphs in which each internal node represents an “if”-test on a feature, each branch represents the outcome of the test, and each leaf node represents a class label.
- Random Forest is an ensemble of decision trees improving accuracy by combining decisions of different classifiers (decision trees).
- Support Vector Machines (SVM) separates the classes by choosing the hyperplane that maximizes the distance between the hyperplane and the closest points in each feature space region, which are called support vectors. In the cases of feature vectors that are nonlinearly separable, a kernel function maps the input vectors to a higher dimension space in which a linear hyperplane can be used to separate the vectors.
- Artificial Neural Networks (ANNs) are classifier methods that do not need special assumptions on the underlying probability models [12,13,14,15]. A classical version of the ANN is the so-called fully connected feed-forward ANN that takes features as an input layer and forward signals from the neurons of one hidden layer to the other hidden layer and finally to the output layer, which usually provides the class probabilities. ANN can learn from examples, i.e., adapt internal weights between neurons so that the predefined feature vectors are optimally allocated to the predefined classes (learning examples). Classical ANNs are fully connected feed-forward networks where each neuron in one layer is connected to all neurons of the previous layer. This kind or ANN is also called multi-layer perceptron (MLP). However, the connections between neurons in the deep learning ANN are adapted for the task at hand, e.g., CNN for image recognition use inspired from human visual system to connect neurons in distributed and hierarchical manner to build a kind of image filters [14,15].
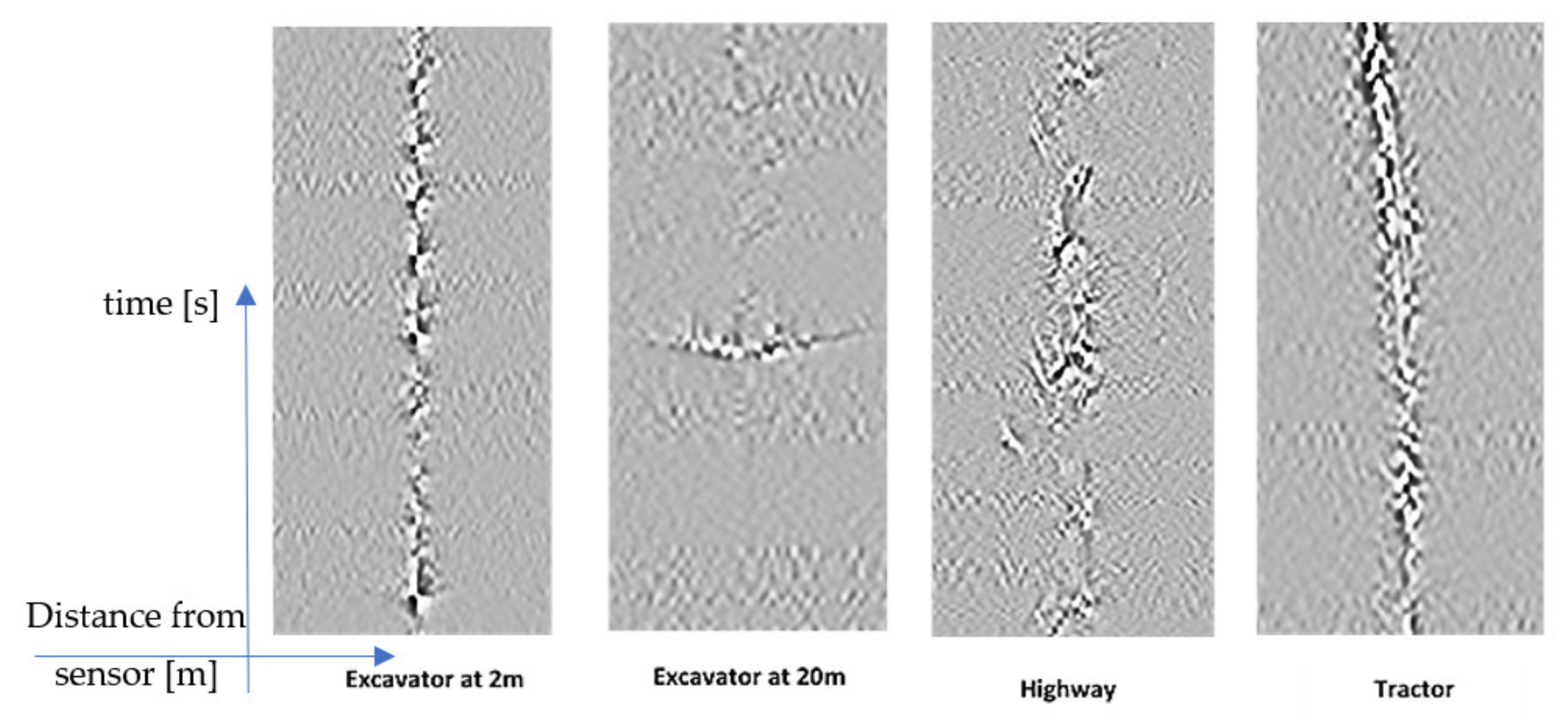
- Deep Neural Networks: among ANN algorithms, especially deep neural networks (DNN) with many layers of neurons organized in hierarchical manner, have drawn attention in recent times due to their superb classification performance and their ability to extract features from raw data [14,15]. As input signal for event detection, an image that has been previously generated from sensor measurements by diverse image processing algorithms can be used [18,19]. DNN can then operate on images to find the DAS events. For image classification, especially effective are convolutional neural networks (CNN) that hierarchically extract features from an image [14]. For example, edges in images are extracted by a first hidden layer, shapes are then extracted in the second layers using edges from the first layer as the input, and finally, the whole objects are extracted in the last hidden layer.
2.3. Tracking and Probability Evaluation
3. Results
3.1. Results with Classical Machine Learning Approach
3.1.1. Feature Extraction
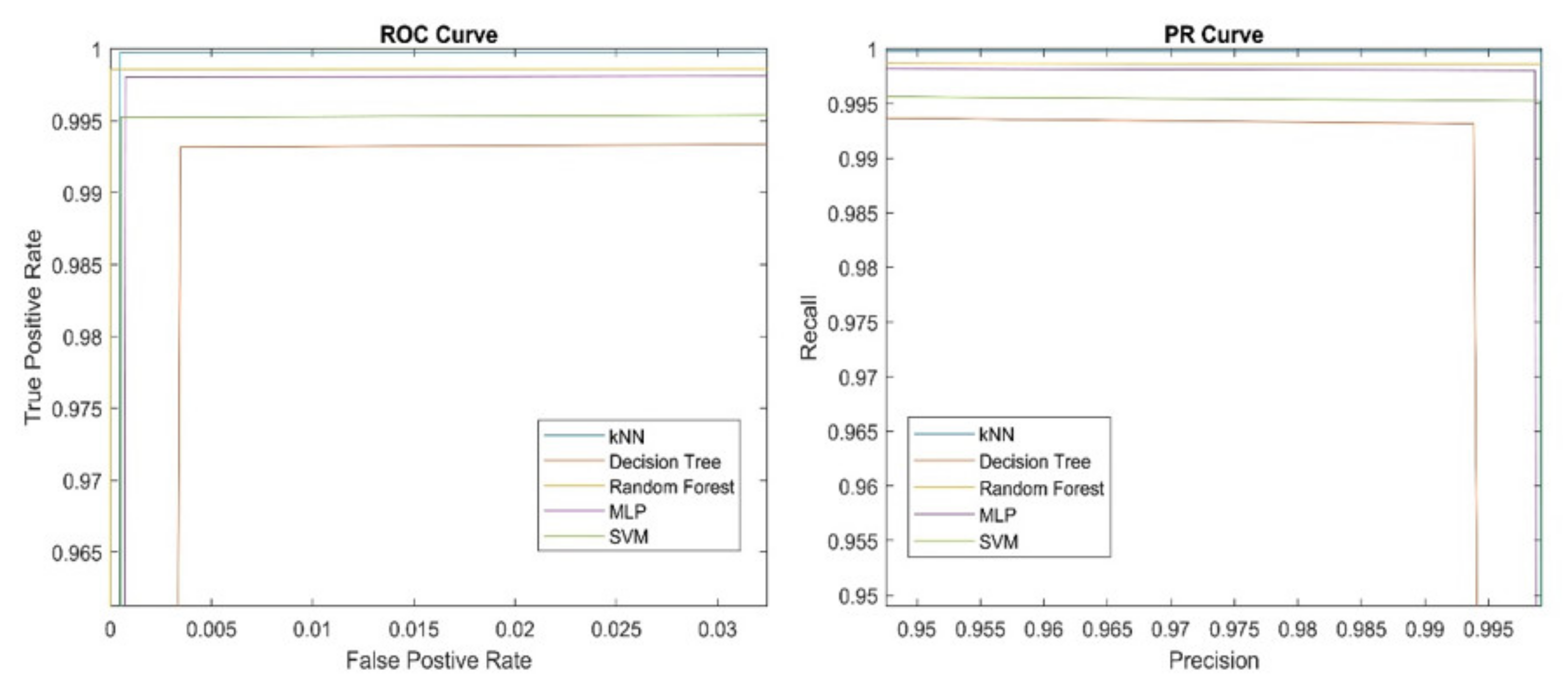
3.1.2. Classification
3.2. Deep Learning Approach
- 2D convolutional layer, consisting of 5 × 5 filters with 20 channels (feature maps) in the output of the convolutional layer. The output of each filter x is passed to a rectified linear unit that produces max (0, x) as its output. The filter is a two-dimensional matrix with parameters trained by a backpropagation algorithm [15]. All filters in one layer share the same set of parameters. The filters at lower layers learn to detect low-level features, such as edges and lines, and the filters at higher layers learn to detect higher-level features, such as shapes.
- 2D max pooling layer, dividing the input into rectangular regions and returning the maximum value of each region. The height and width of the rectangular region (pool size) are both two. This layer creates 2 × 2 pooling regions and returns the maximum of the four elements in each region. Because the stride (step size for moving along the images vertically and horizontally) is also 2 × 2, the pooling regions do not overlap. The role of the pooling layer is signal averaging, i.e., if a part of a shape is detected by one filter and the other part by another filter, the shape could be better detected after pooling these filters together.
- The images are classified into two classes (‘excavator’, ‘no excavator’) by a fully connected output layer that uses the SoftMax function to assign output for each output class k:
- The expected excavator speed is near zero, i.e., the excavator does not change the position over time during the excavation, which helps eliminate land machines as interferers.
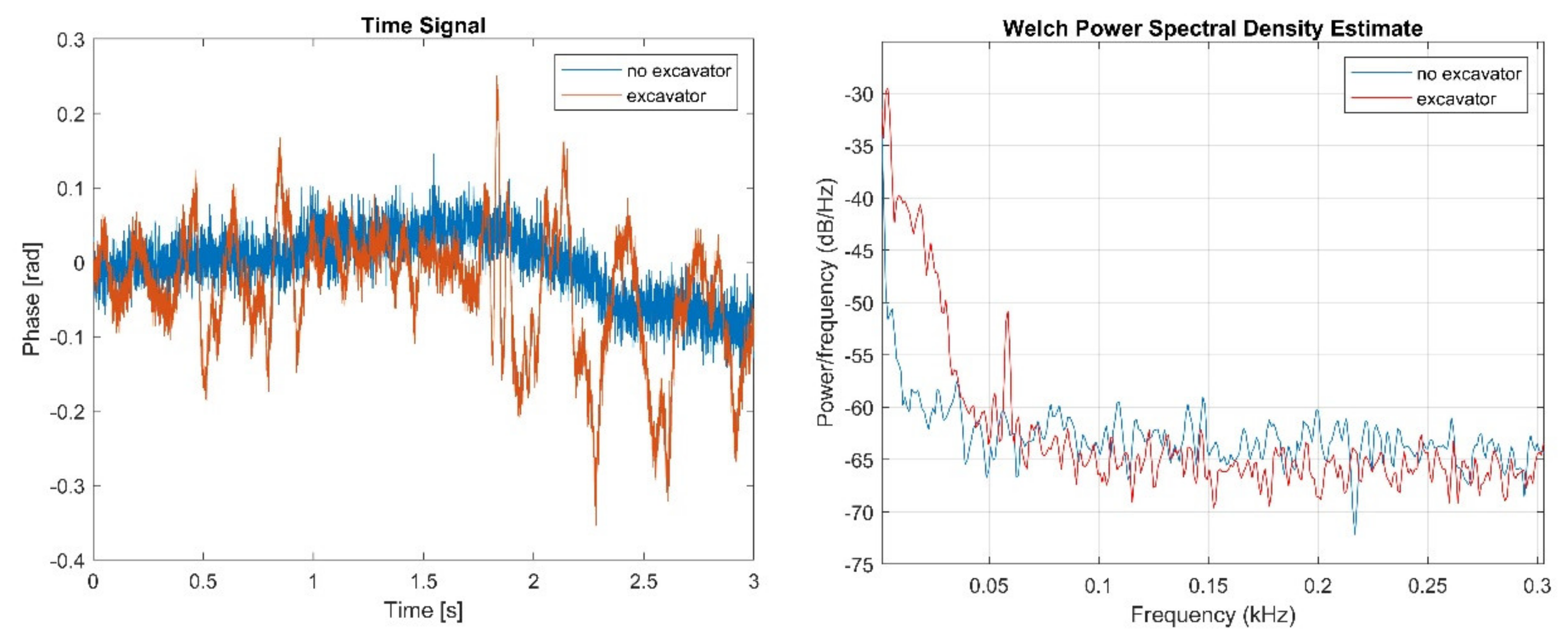
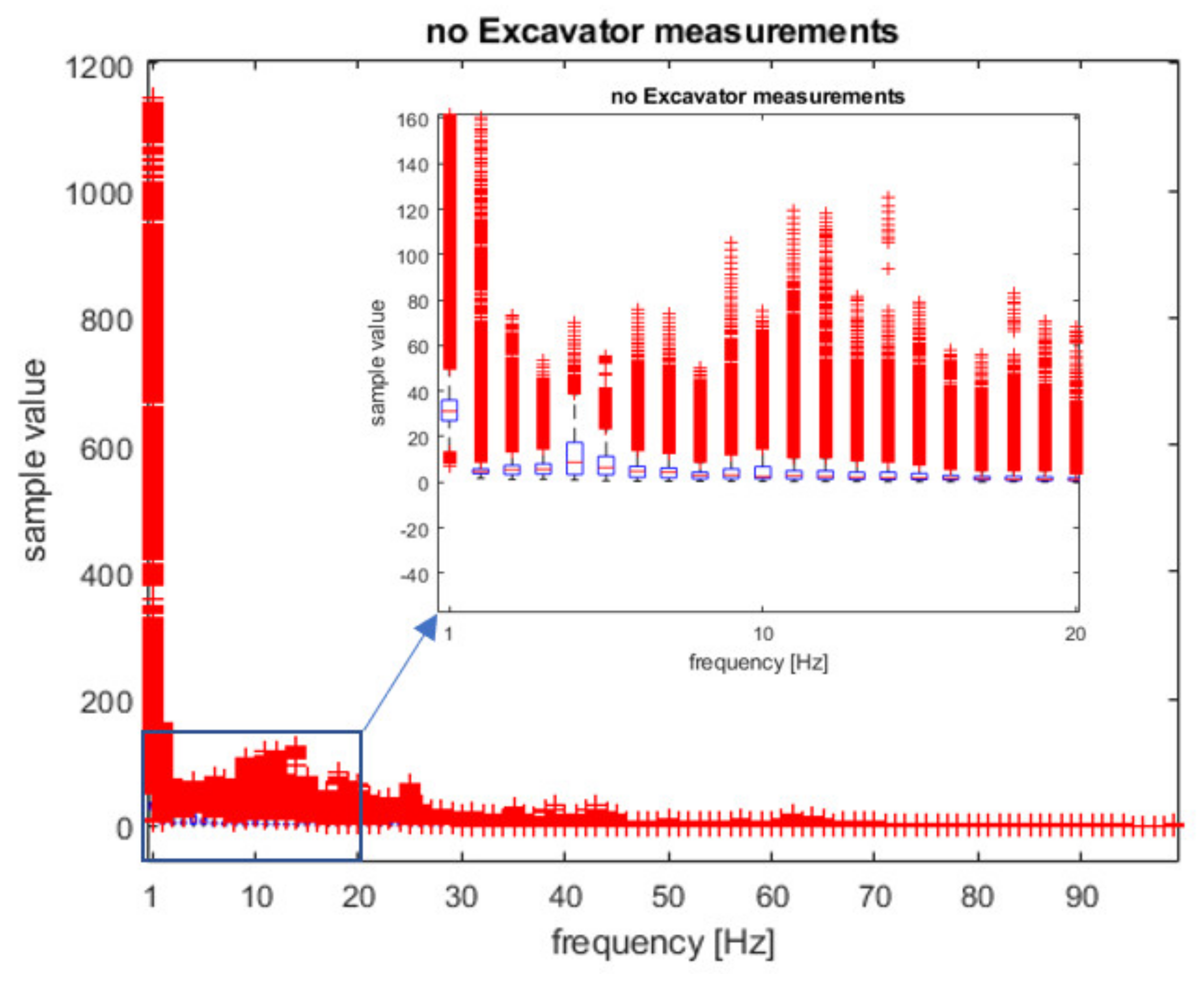
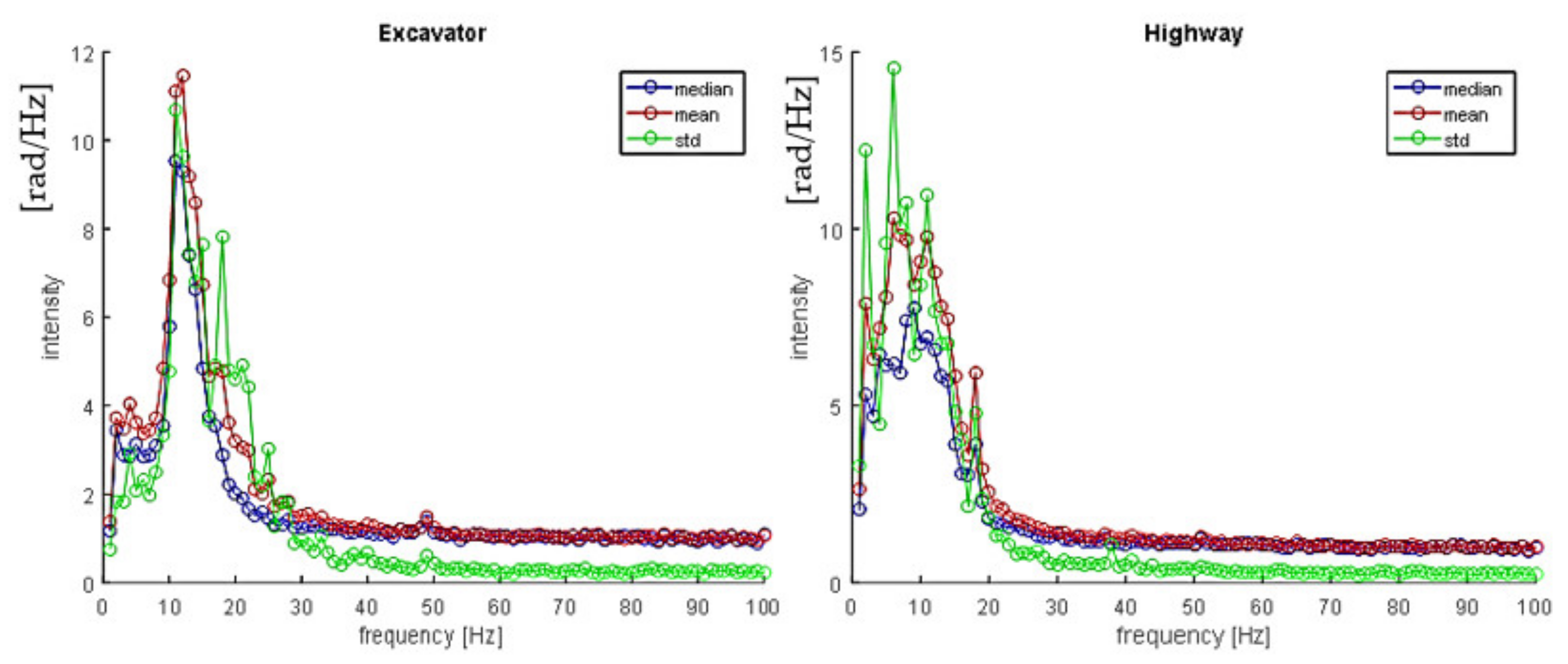
- The characteristic frequencies of excavator signals are derived from spectrum analysis of excavator signals, which helps eliminate some interferers, such as wind wheels vibrations, with different spectrums from the excavator.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Algorithms | Number of False Alarms Per Month | Minimum Delay Per Alarm (s) | Execution Time (s) | Max Detection Distance (m) |
|---|---|---|---|---|
| MLP + heuristic rules | <1 | 90 | 60 | 30 |
| CNN | >10 | 15 | 5 | 10 |
| CNN + heuristic rules | <1 | 15 | 5 | 10 |
4. Discussion and Conclusions
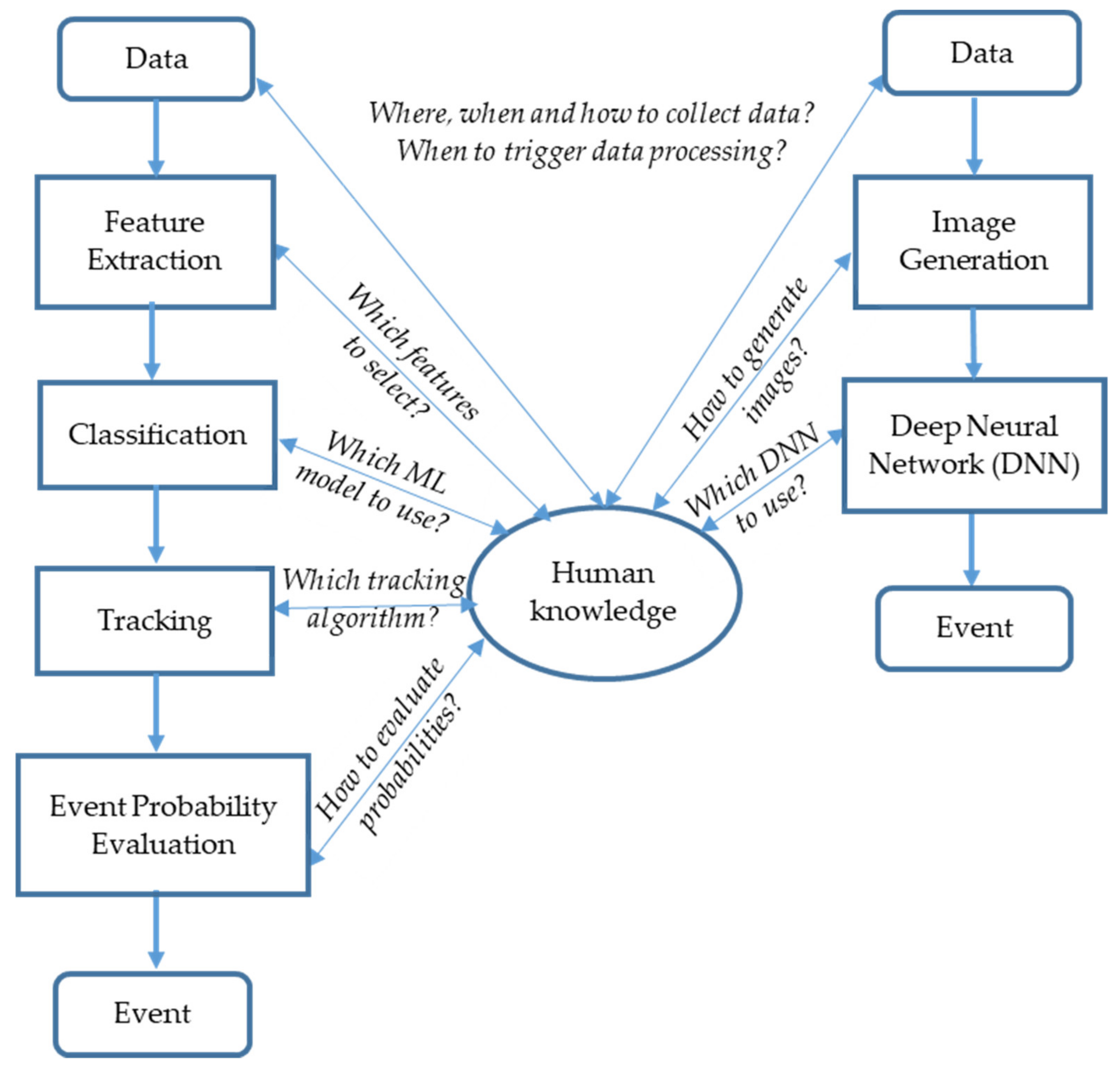
- As the project began, we needed a physical model to decide what, where, when, and how to measure to provide data for machine learning algorithms.
- The classic machine learning approach can be used at the project’s beginning, where little data are available. The classic machine learning approach, combined with human knowledge, provides more insight into the problem domain, i.e., features such as characteristic frequencies relevant for the signal detection, and helps improve physical models of the signal generation. The features extracted from the classic approach can then be used for decisions for which new data might be needed. For example, the interference sources producing similar frequencies as the desired signal are good candidates for collecting new data.
- Deep learning can be used in a later project stage when enough data are collected. Deep neural networks do not need manual feature extractions, which can save a lot of engineering work. Furthermore, deep neural networks can discover unexpected patterns in data that might be unnoticed by a human expert. On the other side, deep neural networks can sometimes discover irrelevant patterns in data and make wrong classifications events with small perturbations of input data. Furthermore, despite all progress in explainable AI, deep neural networks are still a kind of a black box where decisions are not as transparent, as in the case of some classical machine learning techniques such as decision trees [32,33].
- We could achieve the best results by combining the insights from human knowledge about physical models, classical, and deep learning approaches. We used a deep learning network as the core classifier, but we constrained the search domain, only taking into account signals within certain frequencies derived from the physical model and the classical machine learning approach (decision trees). We also eliminated the signals from sources that move too fast to be produced by a standing excavator. This improved accuracy and reduced the probability of false alarms.
- Finally, yet importantly, we need to continue monitoring the system in the deployment. As new data arrive, the system performance may degrade. For example, we noticed that even a few hundred kilometers away, remote earthquakes could cause false alarms. For such cases, automatic updates using information from the internet about interferers, such as earthquakes and construction work, might help. Additionally, including humans in the update loop is needed in order to verify machine/deep learning decisions, define new events, label the data, and improve algorithms.
Supplementary Materials
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Trust, P.S. Nationwide Data on Reported Incidents by Pipeline Type (Gas Transmission, Gas Distribution, Hazardous Liquid). Available online: http://pstrust.org/about-pipelines/stats/accident/ (accessed on 24 October 2021).
- Sachedina, K.; Mohany, A. A review of pipeline monitoring and periodic inspection methods. Pipeline Sci. Technol. 2018, 2, 187–201. [Google Scholar] [CrossRef]
- Zhou, D.P.; Qin, Z.; Li, W.; Chen, L.; Bao, X. Distributed vibration sensing with time-resolved optical frequency-domain reflectometry. Opt. Express 2012, 20, 13138–13145. [Google Scholar] [CrossRef] [PubMed]
- Juarez, J.C.; Maier, E.W.; Choi, K.N.; Taylor, H.F. Distributed Fiber-Optic Intrusion Sensor System. J. Light Wave Technol. 2005, 23, 2081–2087. [Google Scholar] [CrossRef]
- He, Z.; Liu, Q. Optical fiber distributed acoustic sensors: A Review. J. Lightwave Technol. 2021, 39, 3671–3686. [Google Scholar] [CrossRef]
- Wang, Y.; Yuan, H.; Liu, X.; Bai, Q.; Zhang, H.; Gao, Y.; Jin, B. A comprehensive study of optical fiber acoustic sensing. IEEE Access 2019, 7, 85821–85837. [Google Scholar] [CrossRef]
- Choi, K.N.; Juarez, J.C.; Taylor, H.F. Distributed fiber-optic pressure/seismic sensor for low-cost monitoring of long perimeters. Proc. SPIE 2003, 5090, 134–141. [Google Scholar] [CrossRef]
- Kumagai, T.; Sato, S.; Nakamura, T. Fiber-optic vibration sensor for physical security system. In Proceedings of the 2012 IEEE International Conference on Condition Monitoring and Diagnosis, Bali, Indonesia, 23–27 September 2012; pp. 1171–1174. [Google Scholar] [CrossRef]
- Taylor, H.F.; Lee, C.E. Apparatus and Method for Fiber Optic Intrusion Sensing. U.S. Patent US 5,194,847, 29 July 1991. [Google Scholar]
- Harman, R.K. Fiber Optic Interferometric Perimeter Security Apparatus and Method. International Patent Application WO2013/185208, 19 December 2013. [Google Scholar]
- Allen, R.; Mills, D. Signal Analysis: Time, Frequency, Scale, and Structure; Wiley: New York, NY, USA, 2004. [Google Scholar]
- Theodoridis, S.; Koutroumbas, K. Pattern Recognition, 4th ed.; Academic Press: Burlington, VT, USA, 2009. [Google Scholar]
- Géron, A. Hands-on Machine Learning with Scikit-Learn, Keras, and TensorFlow: Concepts, Tools and Techniques to Build Intelligent systems, 2nd ed.; O’Reilly Media: Newton, MA, USA, 2019. [Google Scholar]
- Krizhevsky, A.; Sutskever, I.; Hinton, G.E. ImageNet classification with deep convolutional neural networks. Proc. Adv. Neural Inf. Process. Syst. 2012, 25, 1097–1105. [Google Scholar] [CrossRef]
- Goodfellow, I.; Bengio, Y.; Courville, A. Deep Learning; MIT Press: Cambridge, MA, USA, 2016. [Google Scholar]
- Roweis, S.T.; Ghahramani, Z. A unifying review of linear Gaussian models. Neural Comput. 1999, 11, 305–345. [Google Scholar] [CrossRef] [Green Version]
- Arulampalam, M.S.; Maskell, S.; Gordon, N.; Clapp, T. A tutorial on particle filters for online nonlinear/non-Gaussian Bayesian tracking. IEEE Trans. Signal Process. 2002, 50, 174–188. [Google Scholar] [CrossRef] [Green Version]
- Gonzalez, R.C.; Woods, R.E. Digital Image Processing, 3rd ed.; Prentice Hall: Hoboken, NJ, USA, 2007. [Google Scholar]
- Hlavac, V.; Sonka, M.; Boyle, R. Image Processing, Analysis and Machine Vision, 4th ed.; Cengage Learning: Boston, MA, USA, 2014. [Google Scholar]
- Pearl, J. Probabilistic Reasoning in Intelligent Systems; Morgan Kaufmann: Burlington, MA, USA, 1988. [Google Scholar]
- Neapolitan, R.D. Learning Bayesian Networks; Prentice Hall: Hoboken, NJ, USA, 2004. [Google Scholar]
- Tejedor, J.; Macias-Guarasa, J.; Martins, H.F.; Pastor-Graells, J.; Corredera, P.; Martin-Lopez, S. Machine learning methods for pipeline surveillance systems based on distributed acoustic sensing: A review. Appl. Sci. 2017, 7, 841. [Google Scholar] [CrossRef] [Green Version]
- Tejedor, J.; Macias-Guarasa, J.; Martins, H.F.; Martin-Lopez, S.; Gonzalez-Herraez, M. A multi-position approach in a smart fiber-optic surveillance system for pipeline integrity threat detection. Electronics 2021, 10, 712. [Google Scholar] [CrossRef]
- Makarenko, A.V. Deep learning algorithms for signal recognition in long perimeter monitoring distributed fiber optic sensors. In Proceedings of the IEEE 26th International Workshop on Machine Learning for Signal Processing (MLSP), Vietri sul Mare, Italy, 13–16 September 2016; pp. 1–6. [Google Scholar] [CrossRef] [Green Version]
- Shiloh, L.; Eyal, A.; Giryes, R. Efficient processing of distributed acoustic sensing data using a deep learning approach. J. Lightwave Technol. 2019, 37, 4755–4762. [Google Scholar] [CrossRef]
- Shi, Y.; Wang, Y.; Zhao, L.; Fan, Z. An event recognition method for Φ-OTDR sensing system based on deep learning. Sensors 2019, 19, 3421. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Peng, Z.; Jian, J.; Wen, H.; Gribok, A.; Wang, M.; Liu, H.; Huang, S.; Mao, Z.H.; Chen, K.P. Distributed fiber sensor and machine learning data analytics for pipeline protection against extrinsic intrusions and intrinsic corrosions. Opt. Express 2020, 28, 27277–27292. [Google Scholar] [CrossRef]
- Sun, M.; Yu, M.; Lv, P.; Li, A.; Wang, H.; Zhang, X.; Fan, T.; Zhang, T. Man-made threat event recognition based on distributed optical fiber vibration sensing and SE-WaveNet. IEEE Trans. Instrum. Meas. 2021, 70, 1–11. [Google Scholar] [CrossRef]
- Wu, H.; Zhou, B.; Zhu, K.; Shang, C.; Tam, H.Y.; Lu, C. Pattern recognition in distributed fiber-optic acoustic sensor using an intensity and phase stacked convolutional neural network with data augmentation. Opt. Express 2021, 29, 3269–3283. [Google Scholar] [CrossRef]
- Li, J.; Wang, Y.; Wang, P.; Bai, Q.; Gao, Y.; Zhang, H.; Jin, B. Pattern recognition for distributed optical fiber vibration sensing: A Review. IEEE Sens. J. 2021, 21, 11983–11998. [Google Scholar] [CrossRef]
- Halevy, A.; Norvig, P.; Pereira, F. The unreasonable effectiveness of data. IEEE Intell. Syst. 2009, 24, 8–12. [Google Scholar] [CrossRef]
- Marcus, G. Deep Learning: A critical appraisal. arXiv 2018, arXiv:1801.00631. [Google Scholar]
- Tsimenidis, S. Limitations of Deep Neural Networks: A discussion of G. Marcus’ critical appraisal of Deep Learning. arXiv 2020, arXiv:2012.15754. [Google Scholar]
- Provost, F.; Hibert, C.; Malet, J.P. Automatic classification of endogenous landslide seismicity using the Random Forest supervised classifier. Geophys. Res. Lett. 2017, 44, 113–120. [Google Scholar] [CrossRef]
- Le, N.Q.K.; Kha, Q.H.; Nguyen, V.H.; Chen, Y.C.; Cheng, S.J.; Chen, C.Y. Machine learning-based radiomics signatures for EGFR and KRAS mutations prediction in non-small-cell lung cancer. Int. J. Mol. Sci. 2021, 22, 9254. [Google Scholar] [CrossRef] [PubMed]










| Component | Characteristics |
|---|---|
| Hardware | Industry PC: Intel Core i7, 64 GB RAM, 2TB HDD |
| Laser: output power: 13 dBm | |
| Pulse durations: 10/20 ns | |
| Nominal frequency of 100 MHz | |
| Phase jitter ≤ ± 10 ps RMS | |
| Initial frequency accuracy ≤ ± 150 ppm | |
| Temperature stability ≤ ± 30 ppm | |
| Aging ≤ ± 15 ppm for the 1st year | |
| Photodetectors sensitivity: ≥0.85 mA/m | |
| Data provisioning each second at the rate of 2 kHz | |
| Software | scikit- learn V1.0 (© 2007–2021, scikit-learn developers (BSD License)) library for machine learning Matlab R2019a (The Mathworks, Inc., Natick, MA, USA) for signal processing and machine learning |
| Windows 10 (Microsoft Corporation, Redmond, WA, USA) and GNU C for the rest of the software |
| Task | Design Decisions |
|---|---|
| Data Collection | Total fiber length of 17 km; distance resolution of 10 m. |
| Data collection in a suburban area near Vienna, Austria. | |
| Real-time system evaluations over 3 months. | |
| DAS: phase-sensitive optical time-domain reflectometer (Φ-OTDR). | |
| Collect data at different positions along the fiber at different times during the day and different days during the week. | |
| Collect signals from different interferers: vehicles, land machines, and wind wheels. | |
| Total of 172,400 signal samples with 100 signal values (one signal value for each frequency from 1 to 100 Hz), with class labels. | |
| 23,020 excavator signals, and 149,440 no excavator signals. | |
| Classical ML (supervised) | Training: 137,968 samples, each with 100 signal values at 1–100 Hz. |
| Test: 34,492 samples, each with 100 signal values at 1–100 Hz. | |
| DL CNN (supervised) | Training: 17,054 images (50 × 50 pixels, grey) |
| Test: 4264 images (50 × 50 pixels, grey) | |
| Data Evaluation Trigger | Evaluate data from a fiber section when the average signal of the section is above a section-specific threshold. |
| Feature selection | Use frequency features since they have physical meaning (Earth’s vibrations) and provide the best results in offline simulations. |
| ML Model Selection | Select the best model using off-line Matlab simulations and N-fold cross-validation. |
| DNN Selection | Use CNN since they are appropriate for image recognition |
| Tracking | Use Kalman filter as a widely used standard tracking algorithm |
| ML Algorithm | Accuracy | Precision | Recall | F1 | AUC | 99% Conf. Int. |
|---|---|---|---|---|---|---|
| kNN | 99.96% | 99.91% | 99.98% | 0.99 | 0.99 | +/− 0.01% |
| Decision Tree | 99.53% | 99.38% | 99.32% | 0.99 | 0.99 | +/− 0.05% |
| Random Forest | 99.95% | 100% | 99.86% | 0.99 | 0.99 | +/− 0.02% |
| MLP | 99.88% | 99.87% | 99.80% | 0.99 | 0.99 | +/− 0.02% |
| SVM | 99.79% | 99.91% | 99.52% | 0.99 | 0.99 | +/− 0.03% |
| ML Algorithm | Training Time per Instance (μs) | Test Time per Instance (μs) |
|---|---|---|
| kNN | - | 2048.12 |
| Decision Tree | 336.87 | 0.57 |
| Random Forest | 1277.63 | 16.97 |
| MLP | 824.84 | 0.63 |
| SVM | 668.27 | 358.97 |
| ML Algorithm | Accuracy | 99% Conf. Int. | Exec. Time (μs) |
|---|---|---|---|
| MLP + feature extraction | 99.88% | +/− 0.02% | 554.63 |
| CNN | 99.91% | +/− 0.12% | 34.33 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bublin, M. Event Detection for Distributed Acoustic Sensing: Combining Knowledge-Based, Classical Machine Learning, and Deep Learning Approaches. Sensors 2021, 21, 7527. https://doi.org/10.3390/s21227527
Bublin M. Event Detection for Distributed Acoustic Sensing: Combining Knowledge-Based, Classical Machine Learning, and Deep Learning Approaches. Sensors. 2021; 21(22):7527. https://doi.org/10.3390/s21227527
Chicago/Turabian StyleBublin, Mugdim. 2021. "Event Detection for Distributed Acoustic Sensing: Combining Knowledge-Based, Classical Machine Learning, and Deep Learning Approaches" Sensors 21, no. 22: 7527. https://doi.org/10.3390/s21227527
APA StyleBublin, M. (2021). Event Detection for Distributed Acoustic Sensing: Combining Knowledge-Based, Classical Machine Learning, and Deep Learning Approaches. Sensors, 21(22), 7527. https://doi.org/10.3390/s21227527