
Research of Probability-Based Tunneling Magnetoresistive Sensor Static Hysteresis Model

Abstract
:1. Introduction
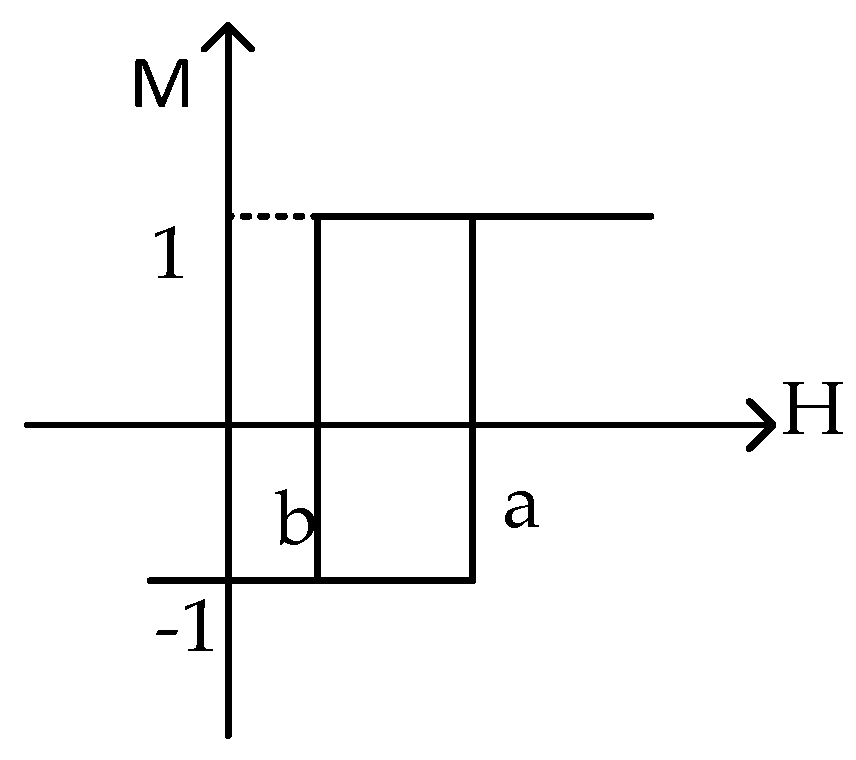
2. Preisach Introduction
3. Probability Model
4. Experiment and Results
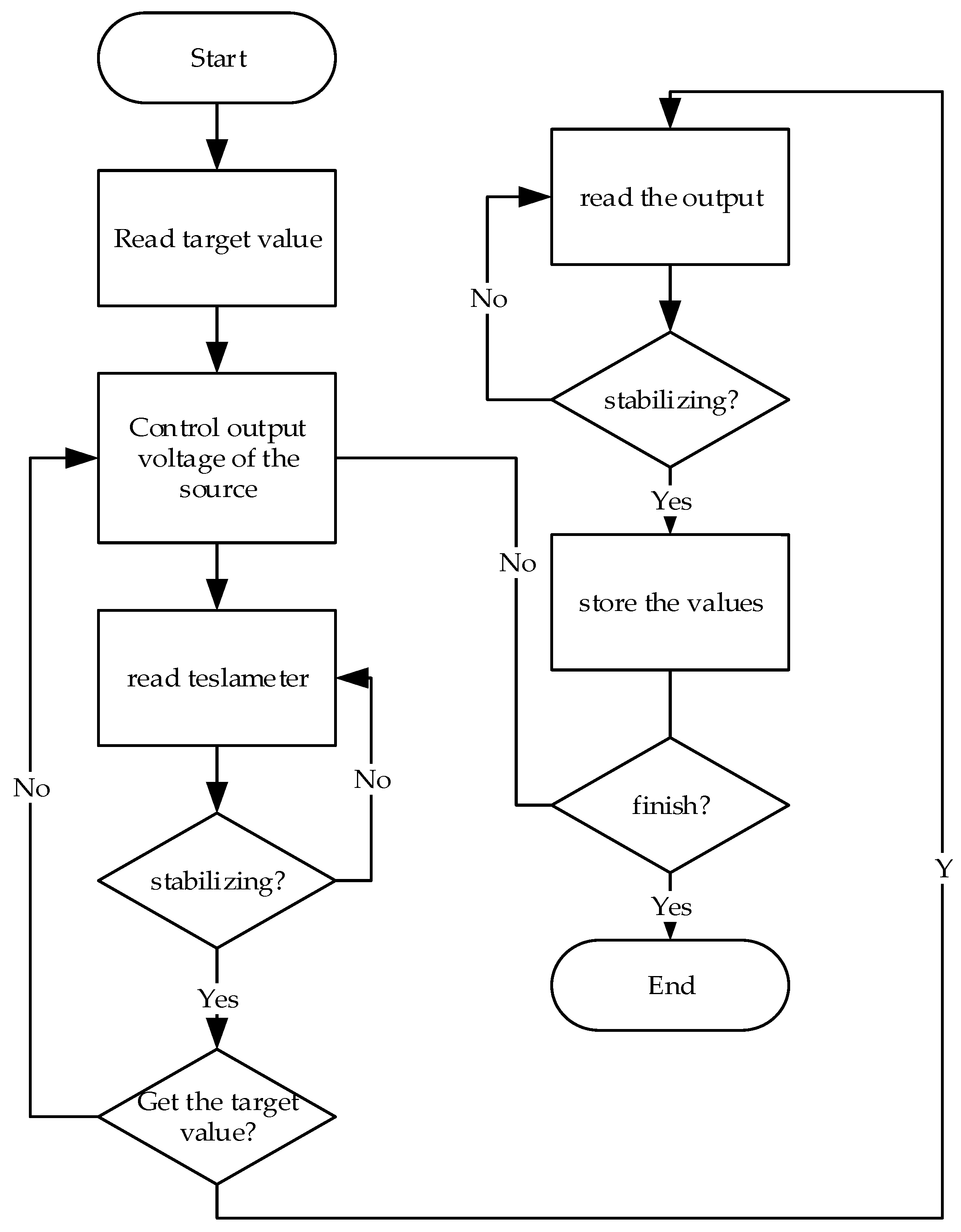
4.1. Experiment Introduction
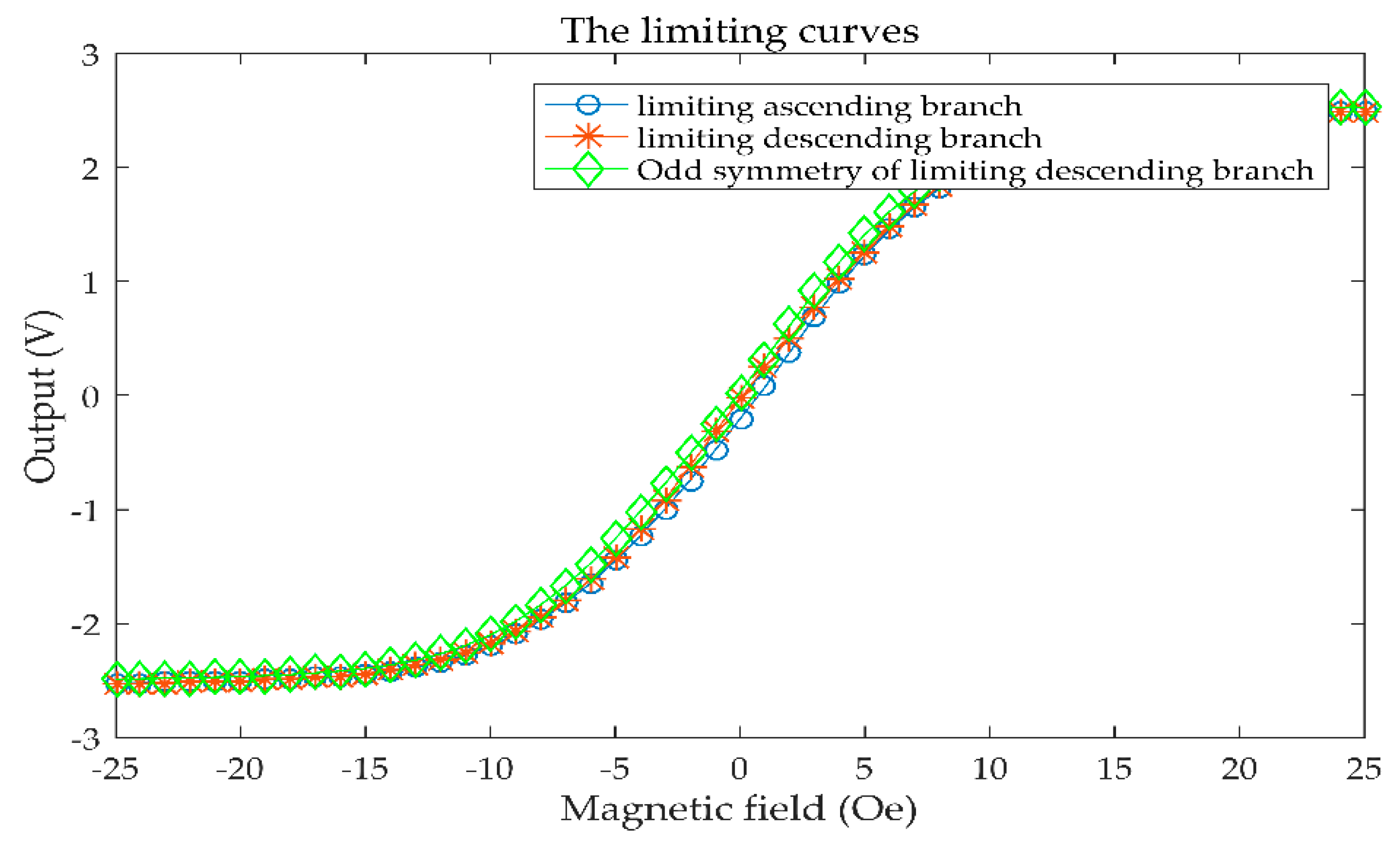
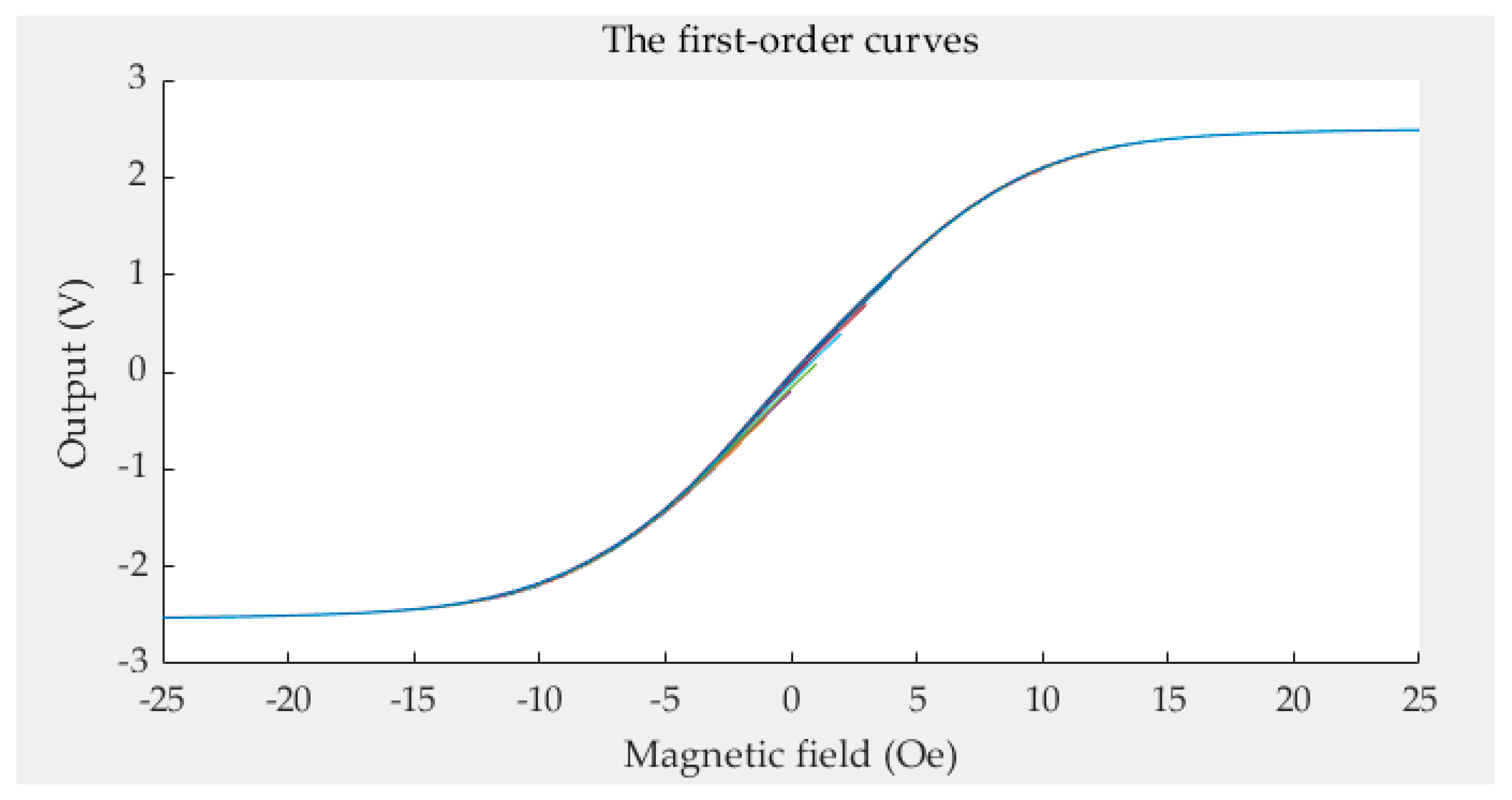
4.2. Results and Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Ku, W.; Silva, F.; Bernardo, J.; Freitas, P.P. Integrated giant magnetoresistance bridge sensors with transverse permanent magnet biasing. J. Appl. Phys. 2000, 87, 5352–5355. [Google Scholar] [CrossRef]
- Tondra, M.; Daughton, J.M.; Nordman, C.; Wang, D.; Taylor, J. Micromagnetic design of spin dependent tunnel junctions for optimized sensingperformance. J. Appl. Phys. 2000, 87, 4678–4681. [Google Scholar] [CrossRef] [Green Version]
- Negulescu, B.; Lacour, D.; Montaigne, F.; Gerken, A.; Paul, J.; Spetter, V.; Marien, J.; Duret, C.; Hehn, C. Wide range and tunable linear magnetic tunnel junction sensor using two exchange pinned electrodes. Appl. Phys. Lett. 2009, 95, 112502. [Google Scholar] [CrossRef] [Green Version]
- Liao, S.-H.; Huang, H.-S.; Sokolov, A.; Yang, Y.; Liu, Y.-F.; Yin, X.; Wilson, A.; Trujilo, A.; Ewing, D.; Liou, S.-H. Hysteresis Reduction in Tunneling Magnetoresistive Sensor with AC Modulation Magnetic Field. IEEE Trans. Magn. 2021, 57, 1–4. [Google Scholar] [CrossRef]
- Xie, F.; Weiss, R.; Weigel, R. Hysteresis Compensation Based on Controlled Current Pulses for Magnetoresistive Sensors. IEEE Trans. Ind. Electron. 2015, 62, 7804–7809. [Google Scholar] [CrossRef]
- Mayergoyz, D. Mathematical Models of Hysteresis and Their Applications; Academic Press: Cambridge, MA, USA, 2003. [Google Scholar]
- Xu, Q.; Wong, P.K. Hysteresis modeling and compensation of a piezostage using least squares support vector machines. Mechatronics 2011, 21, 1239–1251. [Google Scholar] [CrossRef]
- Branko, K.; Alenka, M.; Nebojsa, M. Mathematical modelling of frequency-dependent hysteresis and energy loss of FeBSiC amorphous alloy. J. Magn. Magn. Mater. 2017, 422, 37–42. [Google Scholar]
- Yu, G.R.; You, C.S.; Hong, R.J. Self-tuning fuzzy control of a piezoelectric actuator system. In Proceedings of the 2006 IEEE International Conference on Systems, Man and Cybernetics, Taipei, Taiwan, 8–11 October 2006; Volume 2, pp. 1108–1113. [Google Scholar]
- Payam, A.F.; Fathipour, M.; Yazdanpanah, M.J. A backstepping controller for piezoelectric actuators with hysteresis in nanopositioning. In Proceedings of the 2009 4th IEEE International Conference on Nano/Micro Engineered and Molecular Systems, Shenzhen, China, 5–8 January 2009; pp. 711–716. [Google Scholar]
- Chang, K.M. Adaptive control for piezoelectric positioning system. In Proceedings of the 2006 IEEE International Symposium on Industrial Electronics, Montreal, QC, Canada, 9–13 July 2006; pp. 37–42. [Google Scholar]
- Rakotondrabe, M. Bouc-Wen modeling and inverse multiplicative structure to compensate hysteresis nonlinearity in piezoelectric actuators. IEEE Trans. Autom. Sci. Eng. 2011, 8, 428–431. [Google Scholar] [CrossRef] [Green Version]
- Grech, C.; Buzio, M.; Pentella, M.; Sammut, N. Dynamic Ferromagnetic Hysteresis Modelling Using a Preisach-Recurrent Neural Network Model. Materials 2020, 13, 2561. [Google Scholar] [CrossRef]
- Dang, X.; Tan, Y. Neural networks dynamic hysteresis model for piezoceramic actuator based on hysteresis operator of first-order differential equation. Physica B 2005, 365, 173–184. [Google Scholar] [CrossRef]
- Mayergoyz, I.D. Dynamic preisach models of hysteresis. IEEE Trans. Magn. 1988, 24, 6. [Google Scholar] [CrossRef]
- Dupré, L.; Bertotti, G.; Basso, V.; Fiorillo, F.; Melkebeek, J. Generalisation of the dynamic Preisach model toward grain oriented Fe-Si alloys. Physica B 2000, 275, 202–206. [Google Scholar] [CrossRef]
- Zhu, L.; Jiang, J.; Wu, W.; Li, W.; Lu, K.; Koh, C.S. An Improved Anisotropic Vector Preisach Model for Nonoriented Electrical Steel Sheet Based on Iron Loss Separation Theory. Math. Probl. Eng. 2020, 2020, 7348648. [Google Scholar] [CrossRef]
- Abugri, J.B.; Visscher, P.B.; Gupta, S.; Chen, P.J.; Shull, R.D. FORC+ analysis of perpendicular magnetic tunnel junctions. J. Appl. Phys. 2018, 124, 043901. [Google Scholar] [CrossRef] [Green Version]
- Andreev, M.; Askarov, A.; Suvorov, A. Design of the magnetic hysteresis mathematical model based on Preisach theory. Electr. Eng. 2019, 101, 3–9. [Google Scholar] [CrossRef]
- Davino, D.; Giustiniani, A.; Visone, C. Fast Inverse Preisach Models in Algorithms for Static and Quasistatic Magnetic-Field Computations. IEEE Trans. Magn. 2008, 44, 6. [Google Scholar] [CrossRef]
- Sarkera, P.C.; Guo, Y.; Lu, H.; Zhu, J.G. A generalized inverse Preisach dynamic hysteresis model of Fe-based amorphous magnetic materials. J. Magn. Magn. Mater. 2020, 514, 167290. [Google Scholar] [CrossRef]
- Reimers, A.; Della Torre, E. Fast Preisach-Based Magnetization Model and Fast Inverse Hysteresis Model. IEEE Trans. Magn. 1998, 34, 6. [Google Scholar] [CrossRef]
- Ru, C.; Chen, L.; Shao, B.; Rong, W.; Sun, L. A hysteresis compensation method of piezoelectric actuator: Model, identification and control. Control Eng. Pract. 2009, 17, 1107–1114. [Google Scholar] [CrossRef]
- Wang, D.; Wang, Y.; Lu, Y.; Chen, B.; Wang, L.; Wu, H. Reduced Preisach Model: Beyond Discrete Empirical Interpolation Method. IEEE Access 2019, 7, 155563–155573. [Google Scholar] [CrossRef]
- Friedman, G.; Mayergoyz, I.D. Input-dependent Preisach model and hysteretic energy losses. J. Appl. Phys. 1991, 8, 4611. [Google Scholar] [CrossRef]
- Ktenaa, A.; Fotiadisa, D.I.; Spanosb, P.D.; Massalasc, C.V. A Preisach model identification procedure and simulation of hysteresis in ferromagnets and shape-memory alloys. Physica B 2001, 306, 84–90. [Google Scholar] [CrossRef]
- Hergli, K.; Marouani, H.; Zidi, M.; Fouad, Y.; Elshazly, M. Identification of Preisach hysteresis model parameters using genetic algorithms. J. King Saud Univ. Sci. 2019, 31, 746–752. [Google Scholar] [CrossRef]
- E, J.; Qian, C.; Zhu, H.; Peng, Q.; Zuo, W.; Liu, G. Parameter-identification investigations on the hysteretic Preisach model improved by the fuzzy least square support vector machine based on adaptive variable chaos immune algorithm. J. Low Freq. Noise Vib. Act. Control 2017, 36, 227–242. [Google Scholar]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sensors | Models | Average Value | Reduced Proportion | Absolute Maximum | Reduced Proportion | Variance | Reduced Proportion |
|---|---|---|---|---|---|---|---|
| Sensor 1 | Preisach model | 0.0245 | 19.6% | 0.0347 | 39.8% | 4.5650 × 10−5 | 8.6% |
| Probability model | 0.0197 | 0.0209 | 4.169 × 10−5 | ||||
| Sensor 2 | Preisach model | 0.0156 | 6.5% | 0.0209 | 10.5% | 8.3547 × 10−6 | 14.4% |
| Probability model | 0.0146 | 0.0187 | 8.2343e × 10−6 |
| Sensors | Models | Average Value | Reduced Proportion | Absolute Maximum | Reduced Proportion | Variance | Reduced Proportion |
|---|---|---|---|---|---|---|---|
| Sensor 1 | Preisach model | 0.0135 | 57.0% | 0.0667 | 69.4% | 1.7869 × 10−4 | 64.3% |
| Probability model | 0.0058 | 0.0204 | 6.3849 × 10−5 | ||||
| Sensor 2 | Preisach model | 0.0082 | 14.6% | 0.0342 | 61.4% | 2.7725 × 10−5 | 57.3% |
| Probability model | 0.0070 | 0.0132 | 1.1834 × 10−5 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Y.; Wang, L.; Yu, H.; Qian, Z. Research of Probability-Based Tunneling Magnetoresistive Sensor Static Hysteresis Model. Sensors 2021, 21, 7672. https://doi.org/10.3390/s21227672
Li Y, Wang L, Yu H, Qian Z. Research of Probability-Based Tunneling Magnetoresistive Sensor Static Hysteresis Model. Sensors. 2021; 21(22):7672. https://doi.org/10.3390/s21227672
Chicago/Turabian StyleLi, Yutao, Liliang Wang, Hao Yu, and Zheng Qian. 2021. "Research of Probability-Based Tunneling Magnetoresistive Sensor Static Hysteresis Model" Sensors 21, no. 22: 7672. https://doi.org/10.3390/s21227672
APA StyleLi, Y., Wang, L., Yu, H., & Qian, Z. (2021). Research of Probability-Based Tunneling Magnetoresistive Sensor Static Hysteresis Model. Sensors, 21(22), 7672. https://doi.org/10.3390/s21227672