
Verification of a Stiffness-Variable Control System with Feed-Forward Predictive Earthquake Energy Analysis


Abstract
:1. Introduction
2. Analytical Model for Structures with the LSCIS
2.1. Equation of Motion for the LSCIS
2.2. MEW Method
3. The FPEEA Algorithm
3.1. Earthquake Velocity Energy Index
3.2. The FPEEA Control Law
4. Numerical Simulations
4.1. Time History Inputs and Model Parameters
- (i)
- Whittier Narrows-01, Glendora-N Oakbank, 1 October 1987, station: A-OAK170, peak acceleration: 0.1099 m/s2.
- (ii)
- Chi-Chi, Taiwan, 21 September 1999, station: TCU068-EW, peak acceleration: 5.58 m/s2.
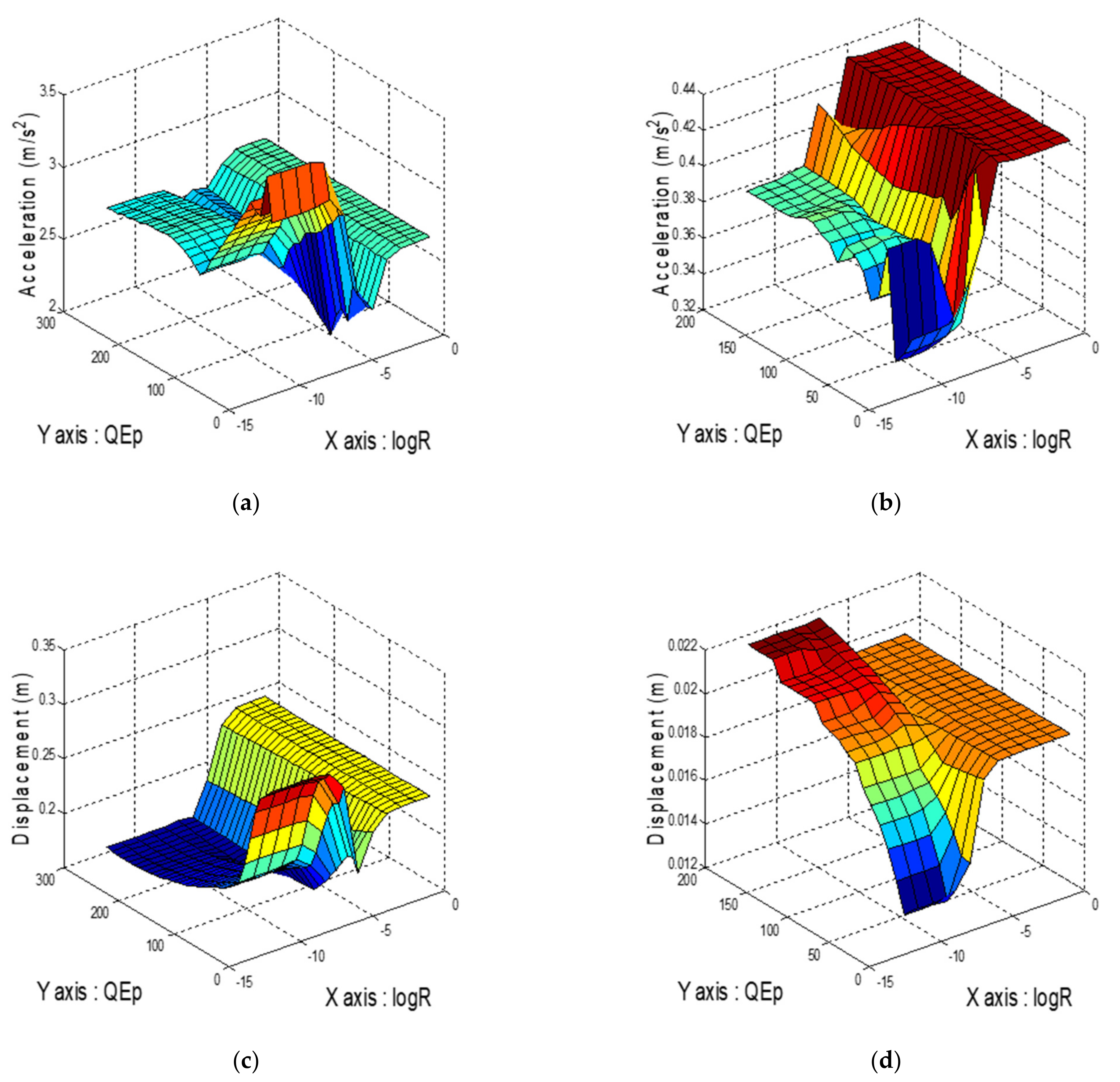
4.2. Parameter Optimization
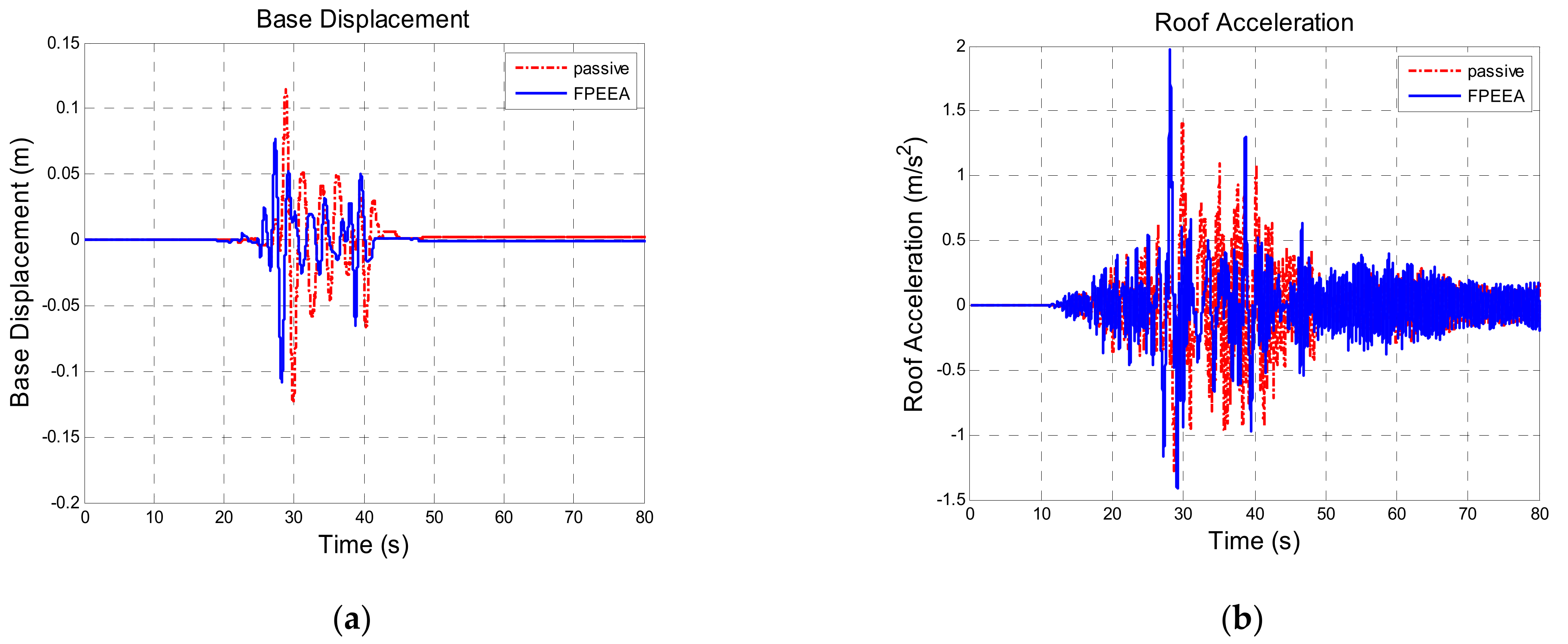
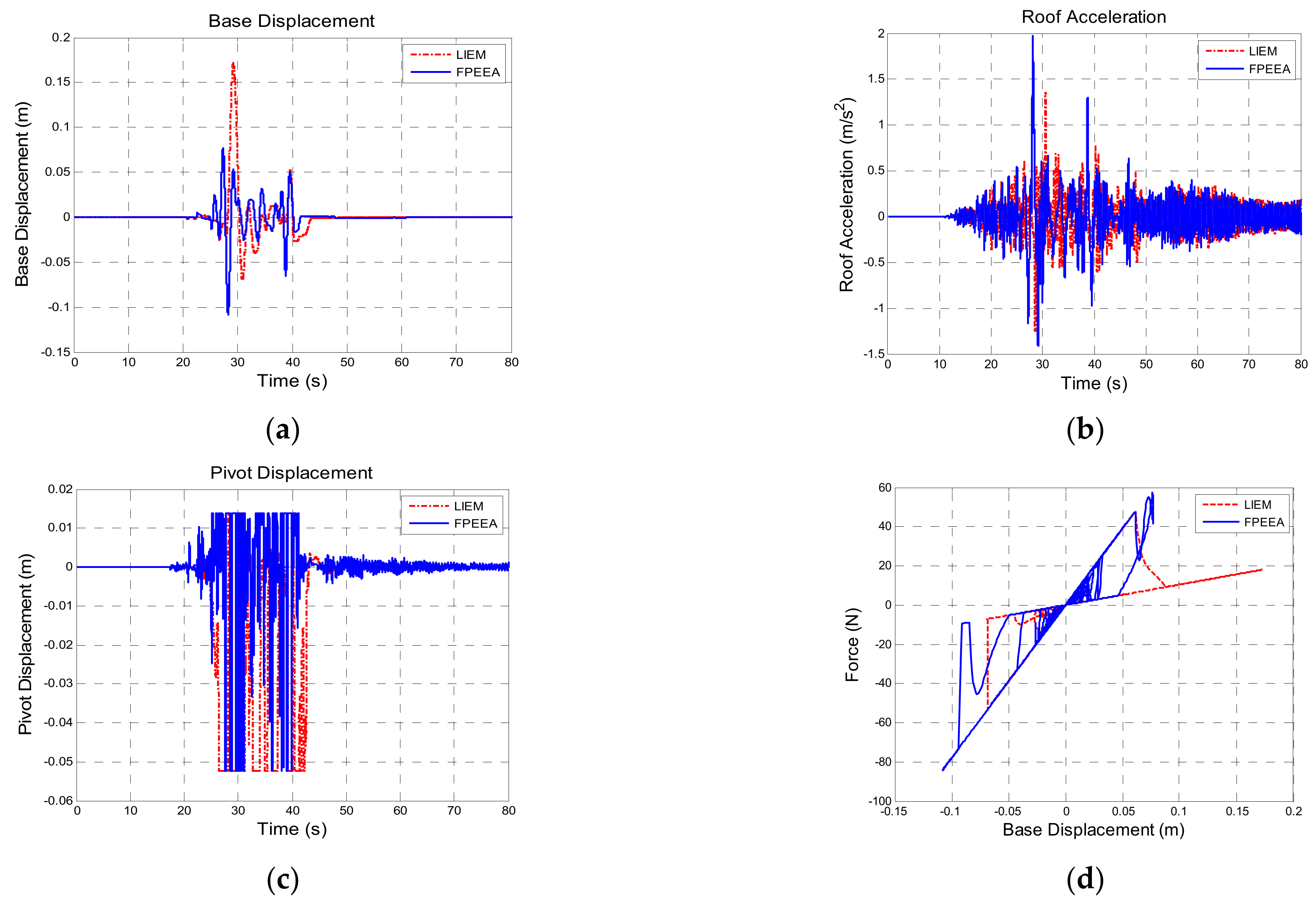
4.3. Earthquake Simulation Results
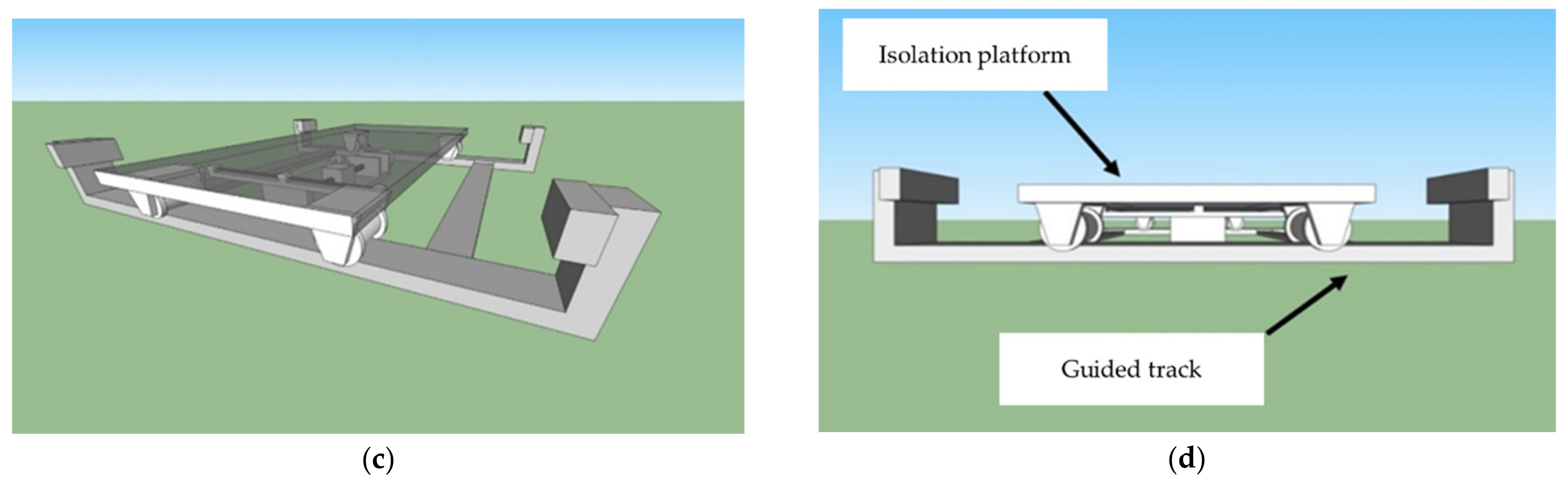
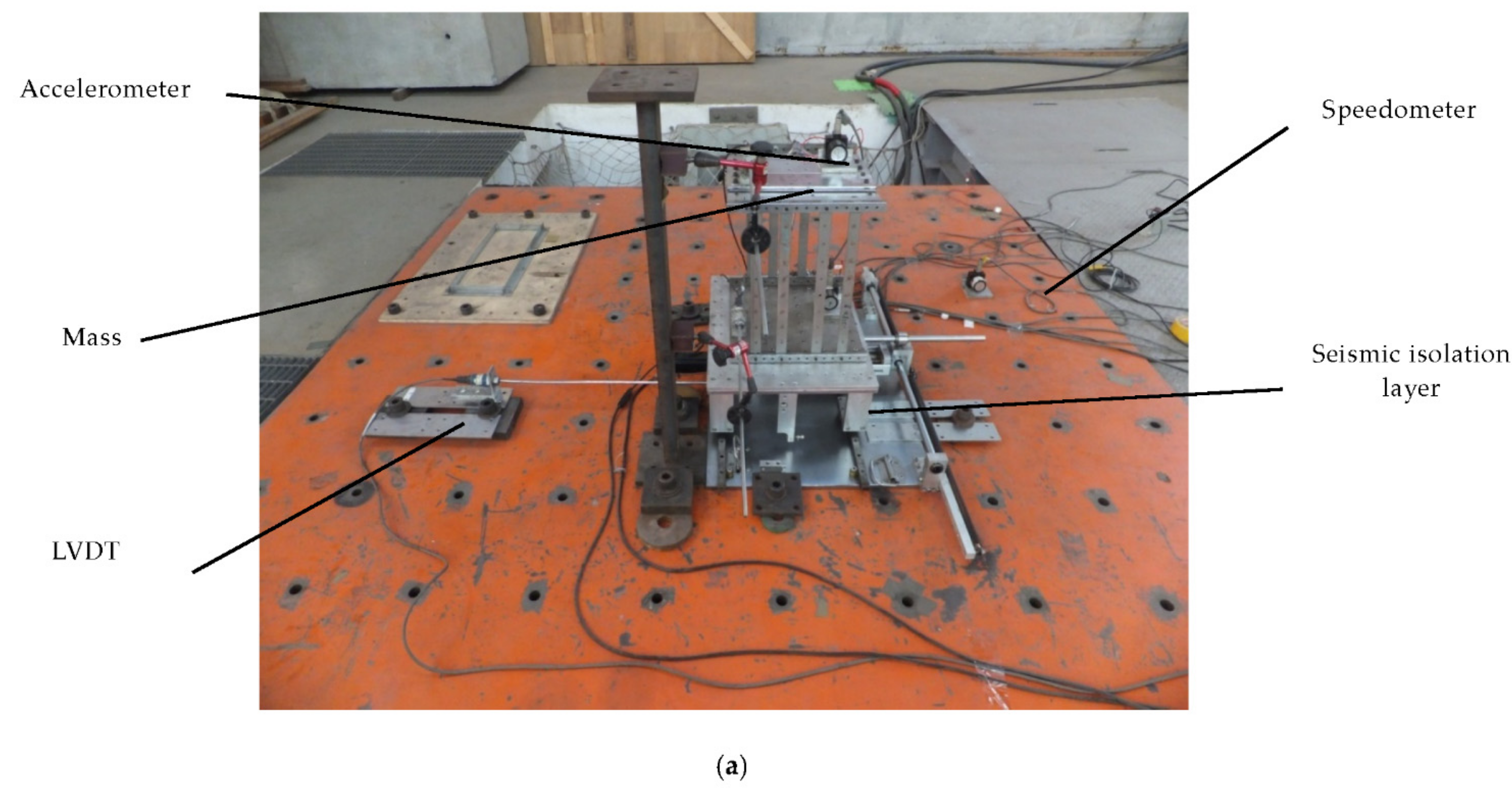
5. Experimental Verification with Shake Table Tests
- (i)
- Northridge-01, 1994, station: Huntington Bch-Waikiki; Mw = 6.69.
- (ii)
- Chi-Chi, Taiwan, 1999/09/21, station: TCU102; Mw = 7.6.
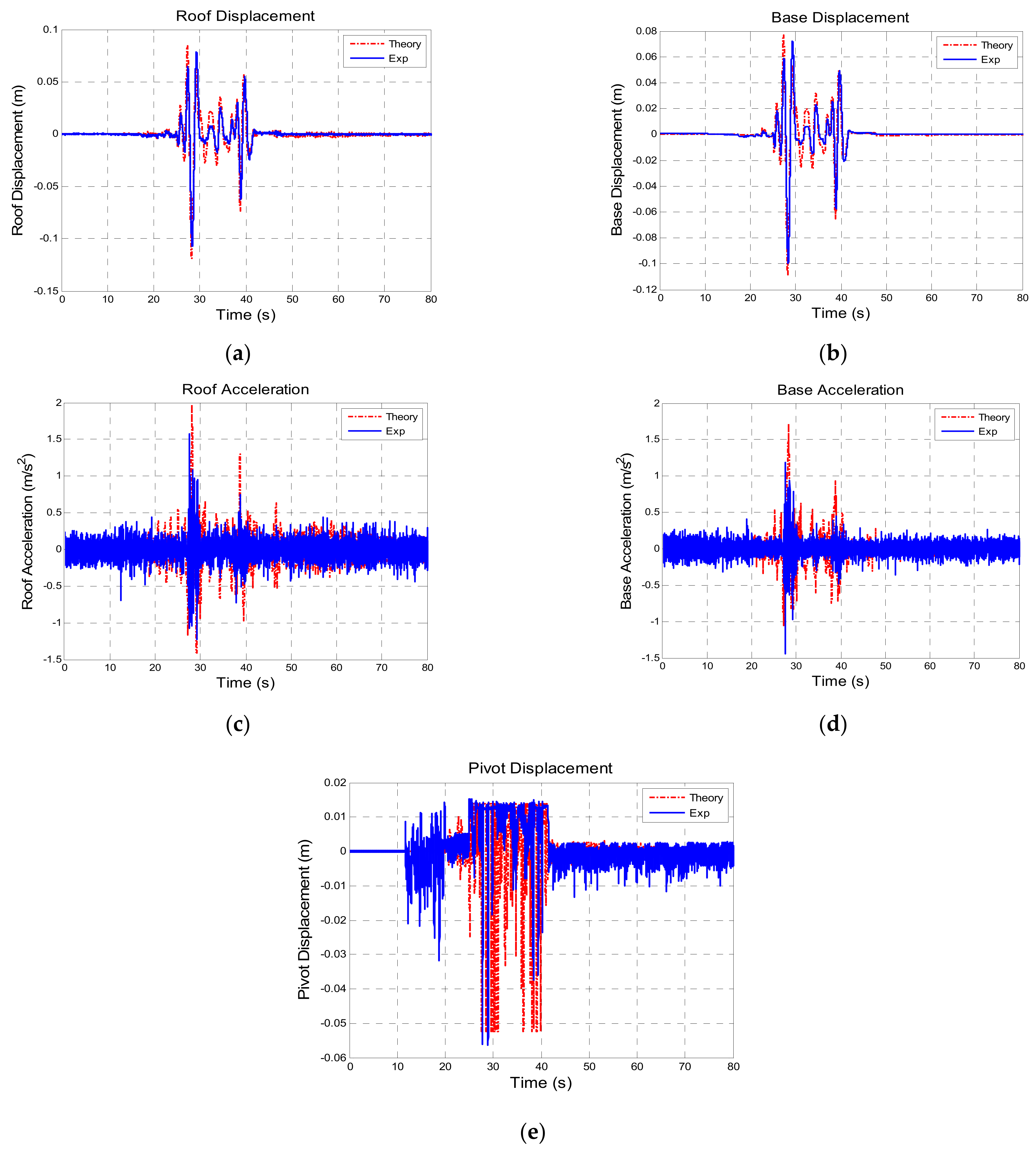
5.1. Comparison of the Experimental and Simulation Results
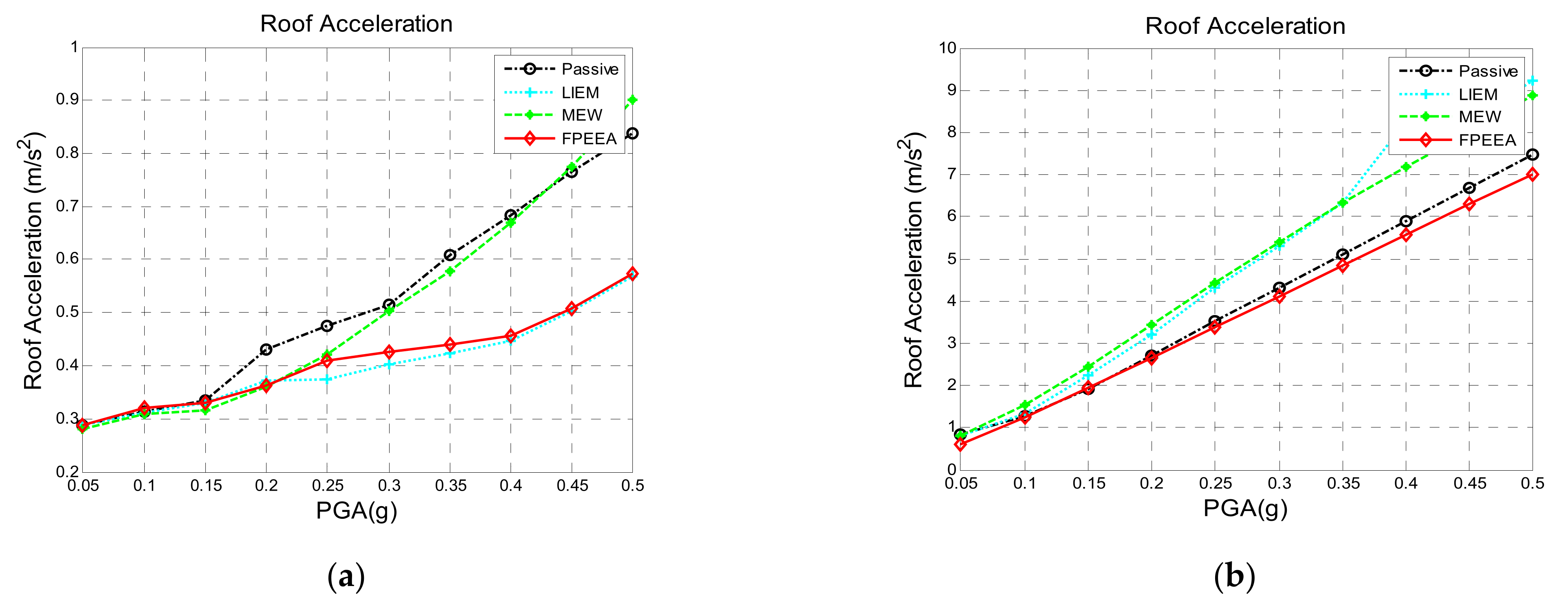
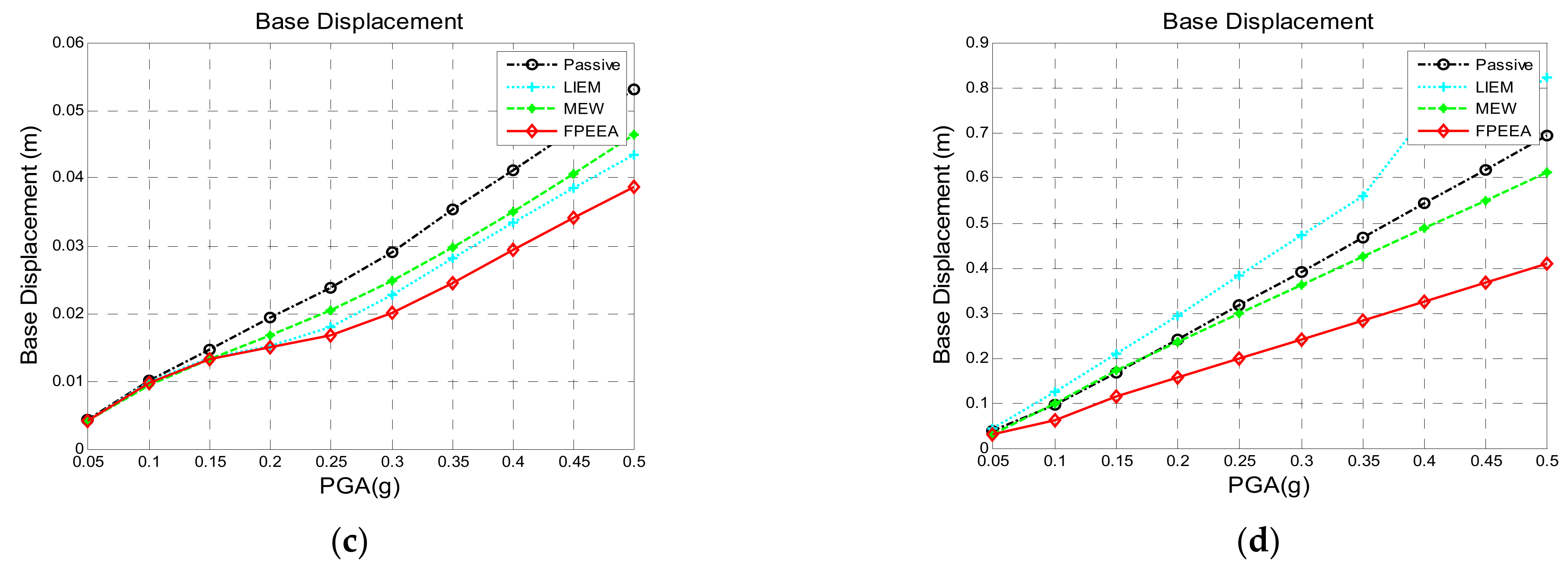
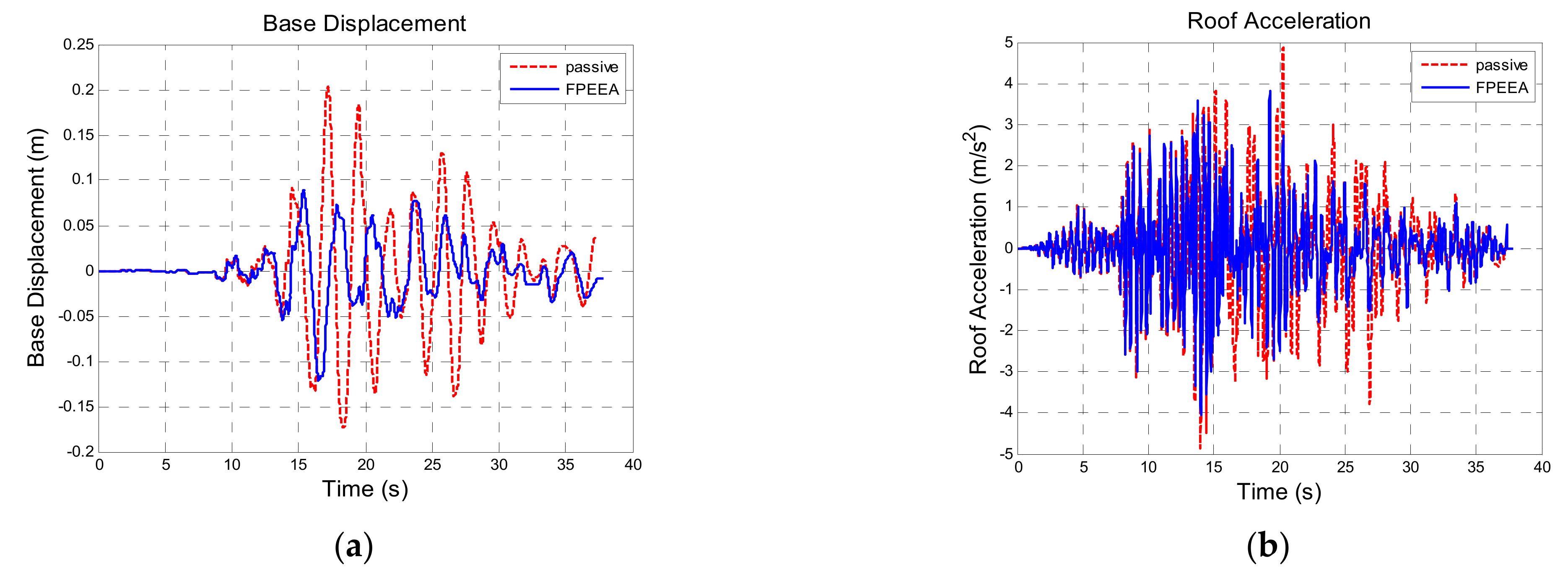
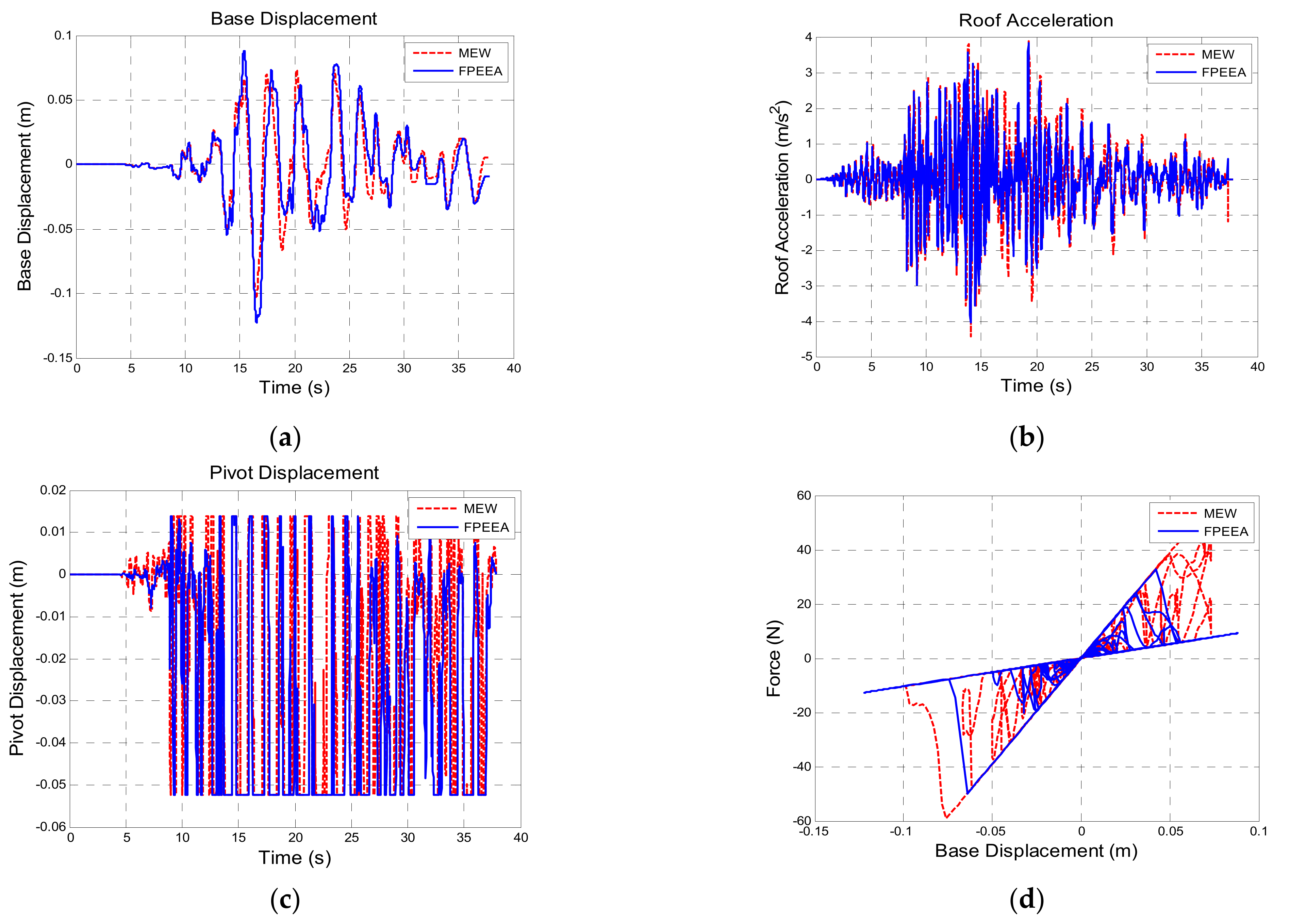
5.2. Comparison of Various Control Laws
6. Conclusions
- Simulation analysis revealed that the FPEEA control can reduce the displacement of the isolation layer under near-fault earthquakes. The isolation layer displacements under near-fault and far-field earthquakes were reduced by 80% and 60%, respectively.
- A detailed comparison indicated that the FPEEA control outperformed the passive approach, LIEM, and generic MEW method in that it achieved greater acceleration response reduction.
- Although the control effects of the FPEEA were comparable to those of the MEW method, the superstructure acceleration response was considerably lower under the FPEEA control than with the MEW method.
- The experimental verification of the FPEEA control through the shake table tests conducted with the LSCIS indicated moderately higher reductions in the displacement and acceleration responses by the FPEEA than by the MEW.
- In summary, the FPEEA control was effective in reducing the displacement response to near-fault earthquakes and in providing excellent structural control under far-field earthquakes.
- Robustness of the proposed FPEEA control can be improved by increasing the ground motion database data in terms of near-fault and far-field earthquakes.
Author Contributions
Funding
Conflicts of Interest
References
- Falcone, R.; Lima, C.; Martinelli, E. Soft computing techniques in structural and earthquake engineering: A literature review. Eng. Struct. 2020, 207, 110269. [Google Scholar] [CrossRef]
- Kobori, T.; Takahashi, M.; Nasu, T.; Niwa, N.; Ogasawara, K. Seismic response controlled structure with Active Variable Stiffness system. Earthq. Eng. Struct. Dyn. 1993, 22, 925–941. [Google Scholar] [CrossRef]
- Niwa, N.; Kobori, T.; Takahashi, M.; Midorikawa, H.; Kurata, N.; Mizuno, T. Dynamic loading test and simulation analysis of full-scale semi-active hydraulic damper for structural control. Earthq. Eng. Struct. Dyn. 2000, 29, 789–812. [Google Scholar] [CrossRef]
- Narasimhan, S.; Nagarajaiah, S. ASTFT semi-active controller for base isolated buildings with variable stiffness isolation systems. Eng. Struct. 2005, 27, 514–523. [Google Scholar] [CrossRef]
- Nagarajaiah, S.; Sahasrabudhe, S. Seismic response control of smart sliding isolation buildings using variable stiffness systems: An experimental and numerical study. Earthq. Eng. Struct. Dyn. 2006, 35, 177–197. [Google Scholar] [CrossRef]
- Sahasrabudhe, S.; Nagarajaiah, S. Effectiveness of Variable Stiffness Systems in Base-isolated Bridges Subjected to Near-fault Earthquakes: An Experimental and Analytical Study. J. Intell. Mater. Syst. Struct. 2005, 16, 743–756. [Google Scholar] [CrossRef]
- Yang, J.N.; Kim, J.; Agrawal, A. Resetting semi-active stiffness damper for seismic response control. J. Struct. Eng. ASCE 2000, 26, 1427–1433. [Google Scholar] [CrossRef]
- Zhou, N.; Liu, K. A tunable high-static–low-dynamic stiffness vibration isolator. J. Sound Vib. 2010, 329, 1254–1273. [Google Scholar] [CrossRef]
- Leavitt, J.; Jabbari, F.; Bobrow, J.E. Optimal performance of variable stiffness devices for structural control. J. Dyn. Syst. Meas. Control 2007, 129, 171. [Google Scholar] [CrossRef] [Green Version]
- Lu, L.-Y.; Guo, Z.-J.; Lin, J.-L. Stiffness controllable isolation system for near-fault seismic isolation. Eng. Struct. 2008, 30, 747–765. [Google Scholar] [CrossRef]
- Ledezma-Ramirez, D.F.; Ferguson, N.S.; Brennan, M.J. Shock isolation using an isolator with switchable stiffness. J. Sound Vib. 2011, 330, 868–882. [Google Scholar] [CrossRef]
- Newmark, N.M.; Blume, J.A.; Kapur, K.K. Seismic design spectra for nuclear power plants. J. Power Div. 1973, 99, 287–303. [Google Scholar] [CrossRef]
- Baker, J.W. Quantitative classification of near-fault ground motions using Wavelet Analysis. Bull. Seismol. Soc. Am. 2007, 97, 1486–1501. [Google Scholar] [CrossRef]
- Zhang, J.; Makris, N. Rocking response of free-standing blocks under cycloidal pulses. J. Eng. Mech. 2001, 127, 473–483. [Google Scholar] [CrossRef] [Green Version]
- Alavi, B.; Krawinkler, H. Behavior of moment-resisting frame structures subjected to near-fault ground motions. Earthq. Eng. Struct. Dyn. 2004, 33, 687–706. [Google Scholar] [CrossRef]
- Mavroeidis, G.P.; Dong, G.; Papageorgiou, A.S. Near-source ground motions, and the response of elastic and inelastic single-degree-of-freedom (SDOF) systems. Earthq. Eng. Struct. Dyn. 2004, 33, 1023–1049. [Google Scholar] [CrossRef]
- Lin, T.-K.; Lu, L.-Y.; Chen, C.-J. Semi-active leverage-type isolation system considering minimum structural energy. Smart Struct. Syst. 2018, 21, 373–387. [Google Scholar]
- Lu, L.-Y.; Chu, S.-Y.; Yeh, S.-W.; Peng, C.-H. Modeling and experimental verification of a variable-stiffness isolation system using a leverage mechanism. J. Vib. Control 2011, 17, 1869–1885. [Google Scholar] [CrossRef]
- Lu, L.-Y.; Chu, S.-Y.; Yeh, S.-W.; Chung, L.-L. Seismic test of least-input-energy control with ground velocity feedback for variable-stiffness isolation systems. J. Sound Vib. 2012, 331, 767–784. [Google Scholar] [CrossRef]
- Davoodi, M.; Jafari, M.K.; Hadiani, N. Seismic response of embankment dams under near-fault and far-field ground motion excitation. J. Eng. Geol. 2013, 158, 66–76. [Google Scholar] [CrossRef]
- Abbas, M.; Izuru, T. Characterization and modelling of near-fault pulse-like strong ground motion via damage-based critical excitation method. Struct. Eng. Mech. 2010, 34, 755–778. [Google Scholar]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Earthquake and Station Name/Hz | 0~1 | 1~2 | 2~3 | 3~4 | 4~5 | Total |
|---|---|---|---|---|---|---|
| Chi-Chi, TCU078W | 95.60% | 1.40% | 0.48% | 0.76% | 0.73% | 98.97% |
| El Centro, H-180 | 38.80% | 47.00% | 7.54% | 3.55% | 1.91% | 98.80% |
| Erzican, ERZ-NS | 82.63% | 11.88% | 3.07% | 1.52% | 0.44% | 99.54% |
| Imperial Valley, H-E06230 | 90.59% | 5.93% | 1.05% | 0.73% | 0.21% | 98.52% |
| Kobe, Takatori-000 | 54.63% | 30.25% | 7.18% | 2.87% | 1.25% | 96.19% |
| Kocaeli, YPT060 | 98.67% | 0.71% | 0.25% | 0.13% | 0.08% | 99.84% |
| Loma Prieta, WVC270 | 96.31% | 0.75% | 0.36% | 0.44% | 0.21% | 98.06% |
| Loma Prieta, LGP000 | 95.40% | 2.73% | 0.78% | 0.34% | 0.26% | 99.51% |
| Northridge, RRS228 | 76.66% | 22.30% | 0.53% | 0.19% | 0.21% | 99.90% |
| Parkfield, C02065 | 64.12% | 17.51% | 5.96% | 3.61% | 4.92% | 96.12% |
| N. Palm Springs, NPS210 | 60.62% | 23.13% | 5.92% | 5.51% | 1.25% | 96.44% |
| N. Palm Springs, WWT180 | 47.69% | 18.59% | 22.67% | 3.54% | 2.92% | 95.41% |
| Morgan Hill, Halls Valley, HVR240 | 23.72% | 56.49% | 15.67% | 1.64% | 0.31% | 97.82% |
| Morgan Hill, AND340 | 59.89% | 18.21% | 11.15% | 4.44% | 4.38% | 98.06% |
| Loma Prieta, GIL337 | 66.62% | 9.10% | 14.28% | 5.57% | 1.80% | 97.36% |
| Loma Prieta, G01000 | 85.70% | 6.20% | 3.22% | 2.07% | 0.41% | 97.61% |
| Earthquake and Station Name/Hz | 0~1 | 1~2 | 2~3 | 3~4 | 4~5 | Total |
|---|---|---|---|---|---|---|
| Chalfant Valley, A-CVK000 | 63.12% | 22.13% | 5.24% | 2.98% | 1.64% | 95.11% |
| Coalinga-01, H-C02000 | 73.83% | 3.47% | 4.26% | 11.46% | 1.99% | 95.01% |
| Kern County, TAF111 | 94.63% | 3.67% | 0.46% | 0.26% | 0.57% | 99.59% |
| Loma Prieta, FMS090 | 73.33% | 2.71% | 5.66% | 8.83% | 3.97% | 94.50% |
| Loma Prieta, HSP090 | 56.92% | 24.61% | 7.59% | 2.67% | 2.32% | 94.11% |
| Morgan Hill, SJB213 | 82.68% | 7.34% | 6.19% | 0.79% | 1.60% | 98.61% |
| N.Palm Springs, Hesperia HES002 | 87.01% | 3.38% | 1.43% | 1.83% | 0.66% | 94.32% |
| San Fernando, ORR291 | 37.87% | 45.05% | 13.54% | 0.89% | 0.95% | 98.29% |
| Coalinga-01 Parkfield H-PG6000 | 7.72% | 76.75% | 7.04% | 1.64% | 2.22% | 95.37% |
| N. Palm Springs H06360 | 43.65% | 13.85% | 28.61% | 8.50% | 1.20% | 95.82% |
| Loma Prieta Hayward HWB310 | 93.55% | 4.25% | 0.66% | 0.27% | 0.27% | 98.99% |
| Landers Yermo Fire Station YER360 | 83.64% | 6.60% | 3.25% | 3.22% | 0.48% | 97.20% |
| Whittier Narrows-01 A-KAG315 | 20.15% | 13.14% | 15.14% | 5.42% | 16.97% | 70.82% |
| Northridge-01, WAI290 | 82.79% | 5.04% | 2.83% | 1.45% | 1.38% | 93.51% |
| Northridge-01, BA000 | 93.26% | 1.29% | 0.36% | 2.65% | 0.21% | 97.76% |
| Northridge-01, STN110 | 71.14% | 11.46% | 3.93% | 3.46% | 2.69% | 92.68% |
| Near to Far-Field/Energy Ratio | ≥99% | ≥98% | ≥97% | <97% | <96% | <95% |
|---|---|---|---|---|---|---|
| Near-fault earthquake (number) | 4 | 9 | 12 | 4 | 1 | 0 |
| Far-field earthquake (number) | 1 | 4 | 6 | 10 | 10 | 6 |
| Total | 5 | 13 | 18 | 14 | 11 | 6 |
| Property | Value | |
|---|---|---|
| Superstructure | Mass (ms) | 18.66 kg |
| Damping (cs) | 9.1104 N-s/m | |
| Stiffness (ks) | 2780 N/m | |
| Natural frequency | 1.95 Hz | |
| isolation layer | Mass (mb) | 38.445 kg |
| Friction coefficient (µ) | 0.002 | |
| Stiffness (kr0) | 500 N/m | |
| Stiffness incremental range of isolation layer kr | (1.5 kr0, 0.2 kr0) |
| Seismic Isolation System | R | Potential Energy Weighing |
|---|---|---|
| Passive | X | X |
| LIEM | X | |
| MEW | 30 | |
| FPEEA |
| Seismic Isolation System | Superstructure Displacement (m) | Isolation Layer Displacement (m) | Superstructure Acceleration (m/s2) | Acceleration of Isolation Layer (m/s2) |
|---|---|---|---|---|
| Passive | 0.021 | 0.019 | 0.430 | 0.369 |
| (1.00) | (1.00) | (1.00) | (1.00) | |
| LIEM | 0.016 | 0.015 | 0.372 | 0.303 |
| (0.766) | (0.779) | (0.866) | (0.819) | |
| MEW | 0.019 | 0.017 | 0.360 | 0.413 |
| (0.906) | (0.864) | (0.836) | (1.118) | |
| FPEEA | 0.016 | 0.015 | 0.362 | 0.355 |
| (0.777) | (0.773) | (0.843) | (0.960) |
| Seismic Isolation System | Superstructure Displacement (m) | Isolation Layer Displacement (m) | Superstructure Acceleration (m/s2) | Acceleration of Isolation Layer (m/s2) |
|---|---|---|---|---|
| Passive | 0.259 | 0.242 | 2.710 | 2.248 |
| (1.00) | (1.00) | (1.00) | (1.00) | |
| LIEM | 0.295 | 0.294 | 3.213 | 2.835 |
| (1.142) | (1.218) | (1.185) | (1.261) | |
| MEW | 0.238 | 0.236 | 3.448 | 2.926 |
| (0.921) | (0.976) | (1.272) | (1.301) | |
| FPEEA | 0.172 | 0.156 | 2.657 | 2.529 |
| (0.665) | (0.648) | (0.980) | (1.125) |
| Item | Value | |
|---|---|---|
| Superstructure | Mass (ms) | 20.52 kg |
| Damping (cs) | 9.1104 N-s/m | |
| Stiffness (ks) | 2800 N/m | |
| Natural frequency | 1.9 Hz | |
| Isolation layer | Mass (mb) | 38.445 kg |
| Friction coefficient (μ) | 0.002 | |
| Stiffness (kr0) | 520 N/m |
| Isolation System | Superstructure Displacement (m) | Displacement of Isolation Layer (m) | Superstructure Acceleration (m/s2) | Acceleration of Isolation Layer (m/s2) |
|---|---|---|---|---|
| Passive (Simulation) | 0.225 | 0.203 | 4.870 | 4.330 |
| (1.00) | (1.00) | (1.00) | (1.00) | |
| LIEM(R = 10−8) (Simulation) | 0.126 | 0.121 | 3.967 | 3.836 |
| (0.559) | (0.597) | (0.815) | (0.886) | |
| MEW (Simulation) | 0.105 | 0.103 | 4.440 | 4.006 |
| (0.465) | (0.507) | (0.912) | (0.925) | |
| FPEEA (Simulation) | 0.126 | 0.122 | 4.042 | 3.788 |
| (0.560) | (0.602) | (0.830) | (0.875) | |
| FPEEA (Experiment) | 0.130 | 0.117 | 4.562 | 4.587 |
| (0.578) | (0.576) | (0.937) | (1.059) |
| Seismic Isolation System | Superstructure Displacement (m) | Isolation Layer Displacement (m) | Superstructure Acceleration (m/s2) | Acceleration of Isolation Layer (m/s2) |
|---|---|---|---|---|
| Passive | 0.134 | 0.124 | 1.415 | 1.238 |
| (Simulation) | (1.00) | (1.00) | (1.00) | (1.00) |
| LIEM(R = 10−8) | 0.170 | 0.172 | 1.348 | 1.289 |
| (Simulation) | (1.268) | (1.387) | (0.953) | (1.042) |
| MEW | 0.146 | 0.142 | 1.470 | 0.920 |
| (Simulation) | (1.088) | (1.141) | (1.039) | (0.743) |
| FPEEA | 0.119 | 0.109 | 1.974 | 1.716 |
| (Simulation) | (0.886) | (0.877) | (1.395) | (1.387) |
| FPEEA | 0.107 | 0.100 | 1.573 | 1.440 |
| (Experiment) | (0.800) | (0.805) | (1.112) | (1.164) |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lin, T.-K.; Chandrasekhara, T.; Liu, Z.-J.; Chen, K.-Y. Verification of a Stiffness-Variable Control System with Feed-Forward Predictive Earthquake Energy Analysis. Sensors 2021, 21, 7764. https://doi.org/10.3390/s21227764
Lin T-K, Chandrasekhara T, Liu Z-J, Chen K-Y. Verification of a Stiffness-Variable Control System with Feed-Forward Predictive Earthquake Energy Analysis. Sensors. 2021; 21(22):7764. https://doi.org/10.3390/s21227764
Chicago/Turabian StyleLin, Tzu-Kang, Tappiti Chandrasekhara, Zheng-Jia Liu, and Ko-Yi Chen. 2021. "Verification of a Stiffness-Variable Control System with Feed-Forward Predictive Earthquake Energy Analysis" Sensors 21, no. 22: 7764. https://doi.org/10.3390/s21227764
APA StyleLin, T. -K., Chandrasekhara, T., Liu, Z. -J., & Chen, K. -Y. (2021). Verification of a Stiffness-Variable Control System with Feed-Forward Predictive Earthquake Energy Analysis. Sensors, 21(22), 7764. https://doi.org/10.3390/s21227764