
Combining Regional Energy and Intuitionistic Fuzzy Sets for Infrared and Visible Image Fusion


Abstract
:1. Introduction
2. Related Works
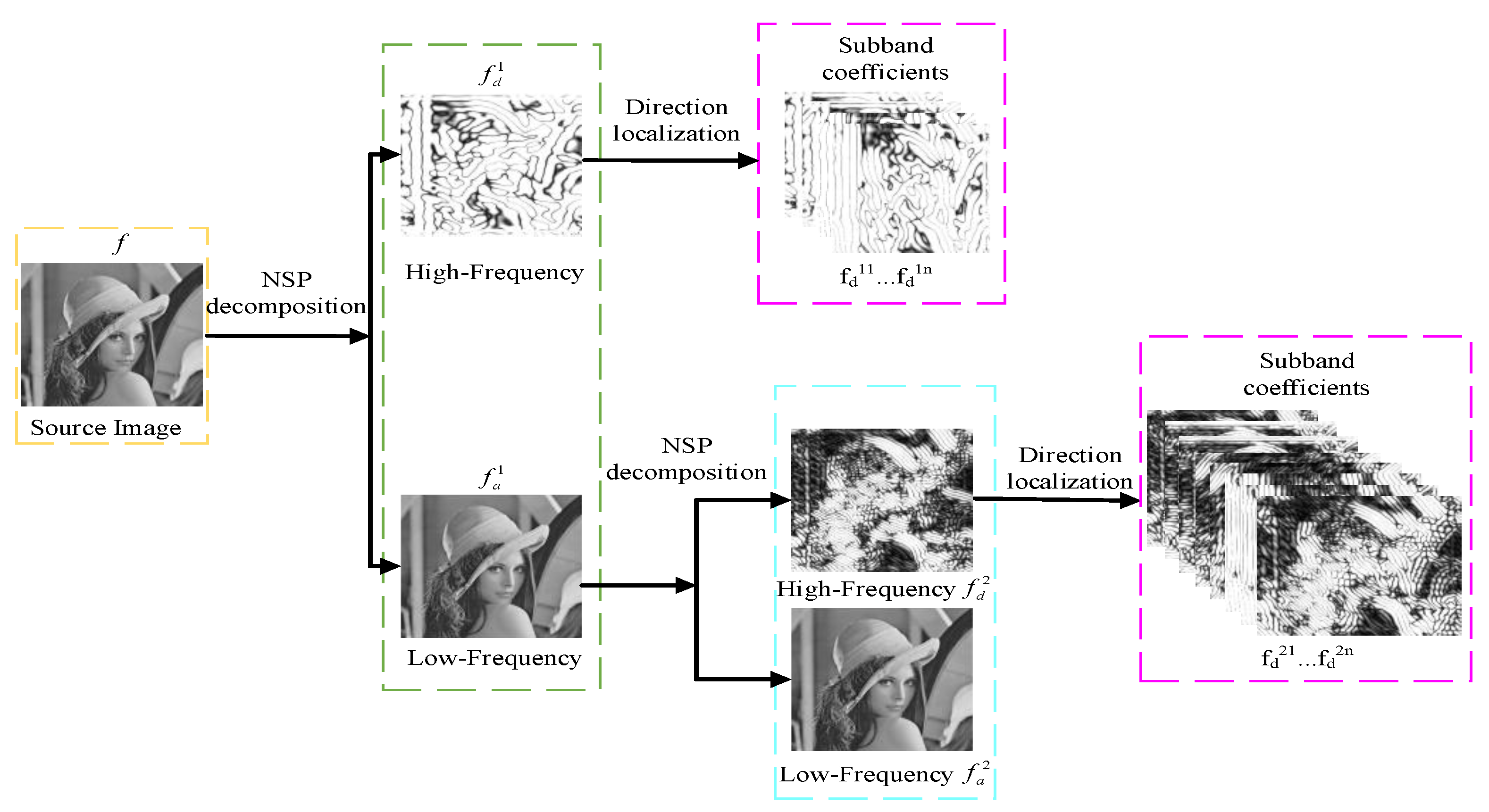
2.1. Basic Principle of NSST
2.2. Fuzzy Set Theory
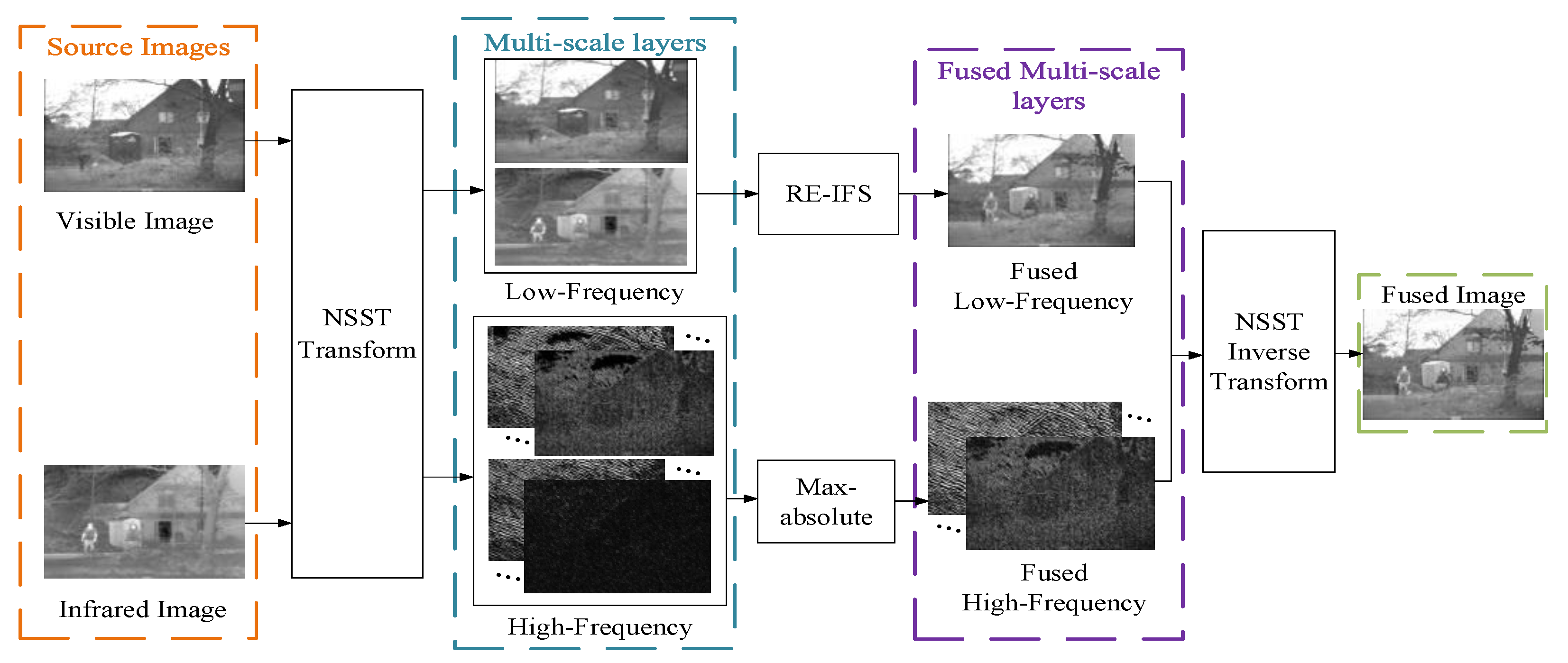
3. Proposed Method
3.1. NSST Decomposition
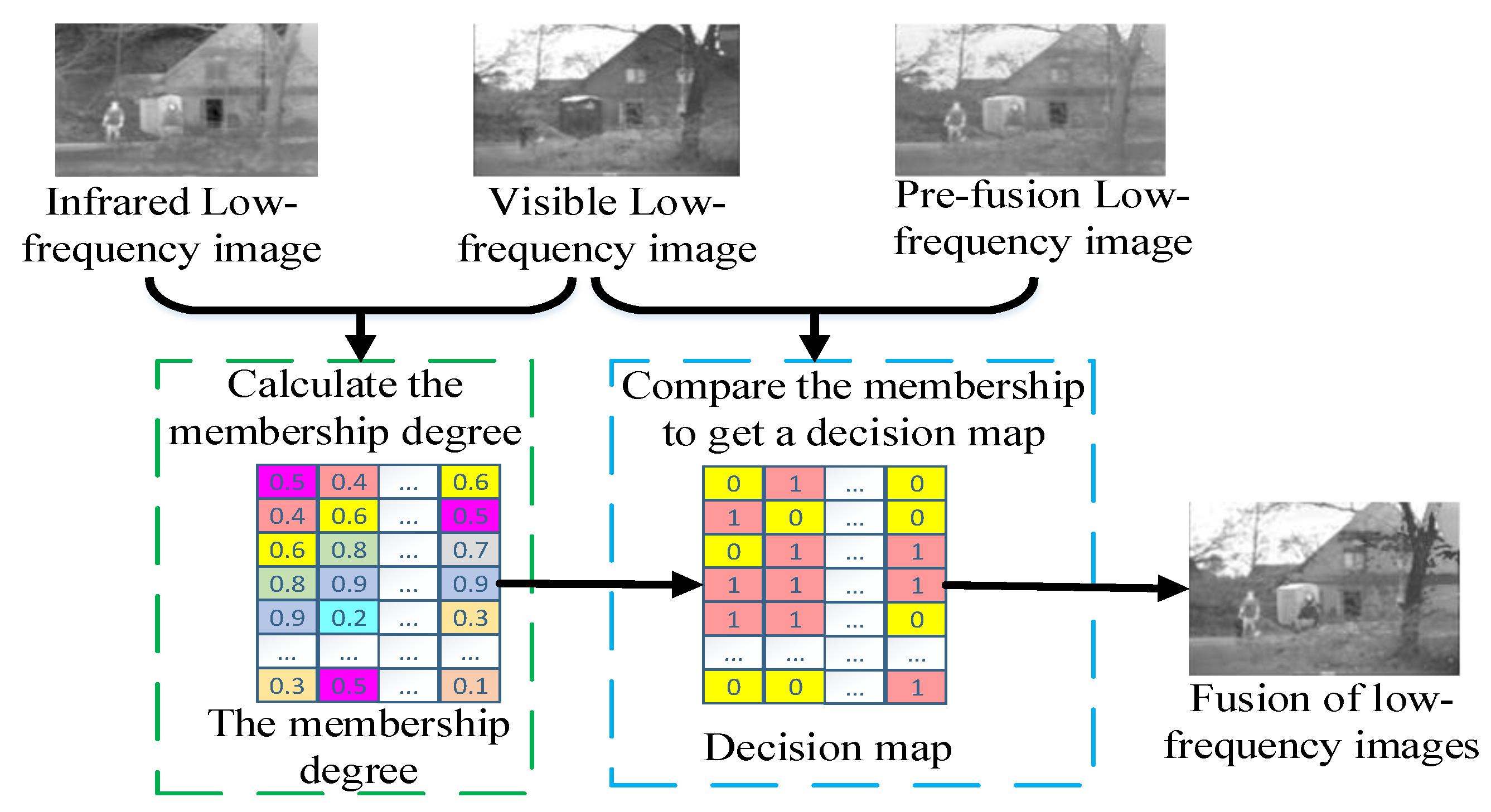
3.2. The Rule for Low-Frequency Components
- (1)
- The pre-fusion based on RE
- (2)
- The final fusion based on IFS
3.3. The Rule for High-Frequency Components
3.4. NSST Reconstruction
| Algorithm 1. The proposed RE-IFS-NSST fusion algorithm. |
| Input: Infrared image (IR), Visible image (VIS) |
| Out: Fused image (F). |
|
4. Experimental Results
4.1. Datasets
4.2. Experimental Setting
- (1)
- The computer is configured as 2.6 Hz Intel Core CPU and 4GB memory, and all experimental codes run on the Matlab2017 platform.
- (2)
- In the proposed method, the ‘maxflat’ is chosen as the pyramid filter. The numbers of decomposition level and directions are 3 and {16,16,16}, respectively.
- (3)
- In the RE-NSST and IFS-NSST methods, the parameters of NSST are the same as that of the proposed method. The calculation of RE and IFS are the same as that of the proposed method.
- (4)
- In Bala and Gauss methods, the ‘9-7′ and ‘pkva’ are chosen as the pyramid filter and the directional filter respectively, and the decomposition scale is 3.
- (5)
- In the MDLatLRR method, the decomposition level selection 2.
- (6)
- The parameters of the other 9 methods are set following the best parameter setting reported in the corresponding papers.
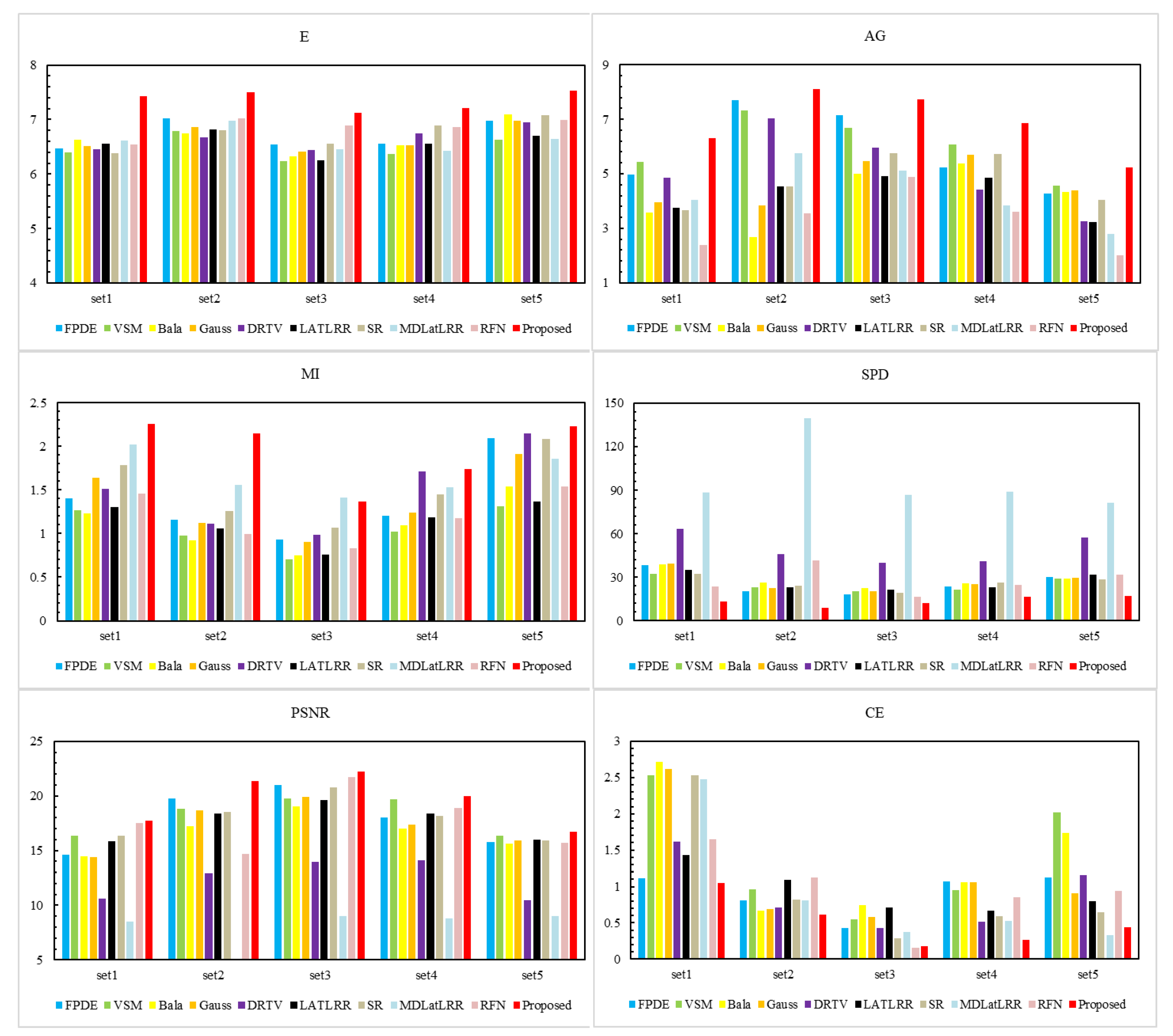
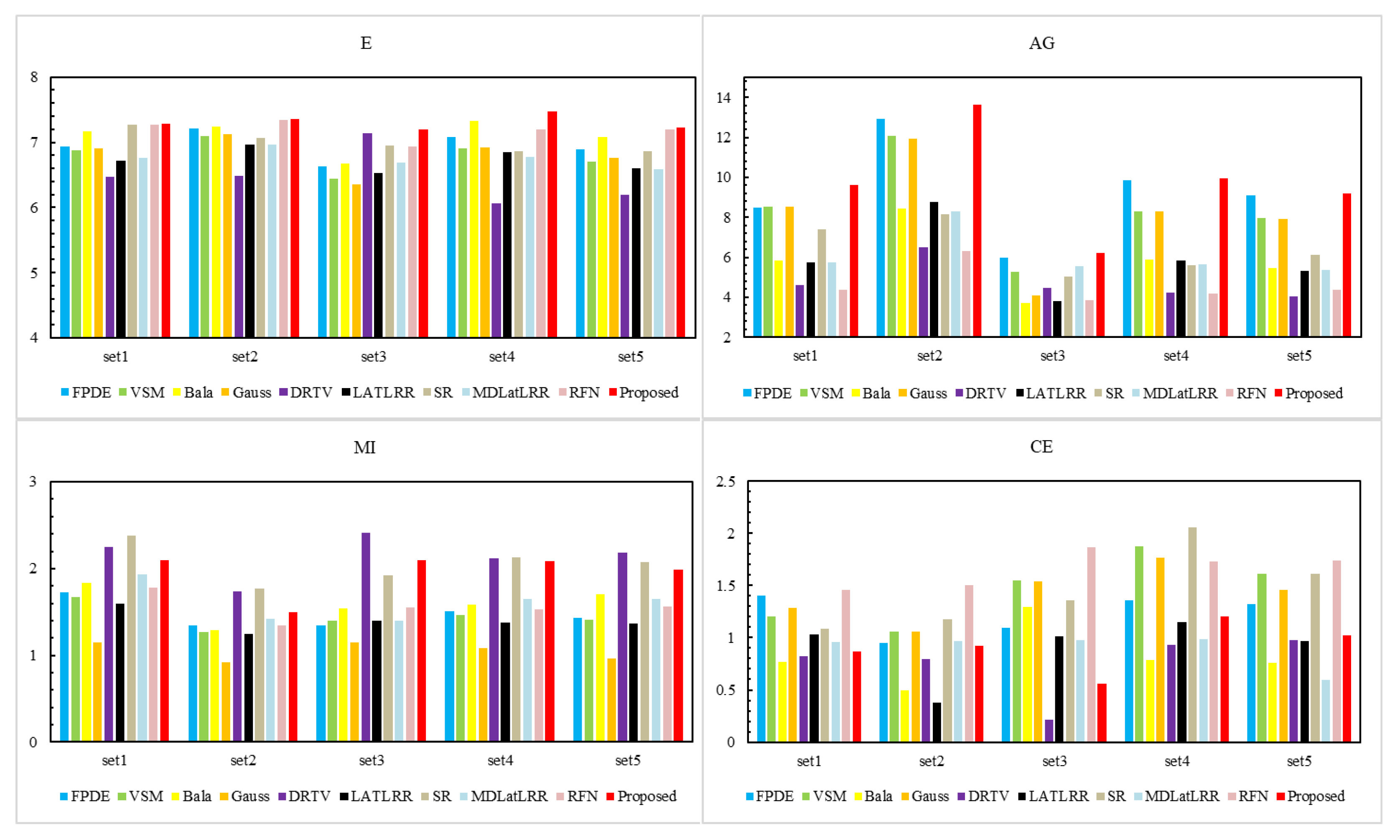
4.3. Quantitative Evaluation
- (1)
- Entropy (E) [43]
- (2)
- Average Gradient (AG) [43]
- (3)
- Mutual Information (MI) [44]
- (4)
- Cross Entropy (CE) [44]
- (5)
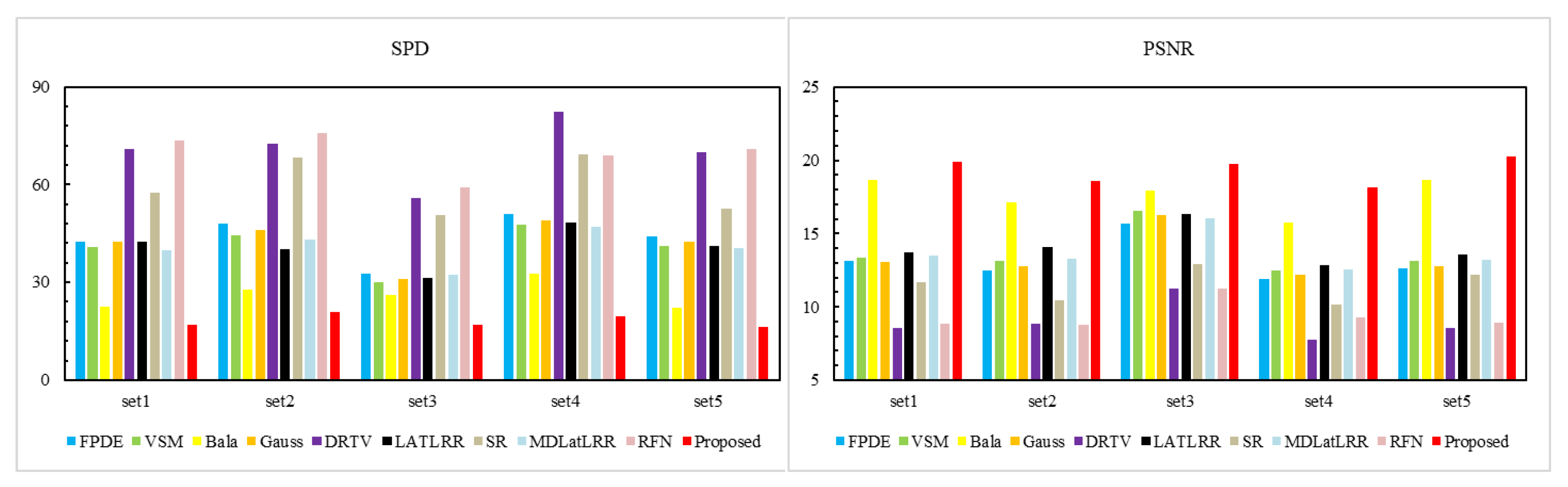
- Spectral Distortion (SPD) [45]
- (6)
- Peak signal to noise ratio (PSNR) [44]
4.4. Fusion Results on the TNO Dataset
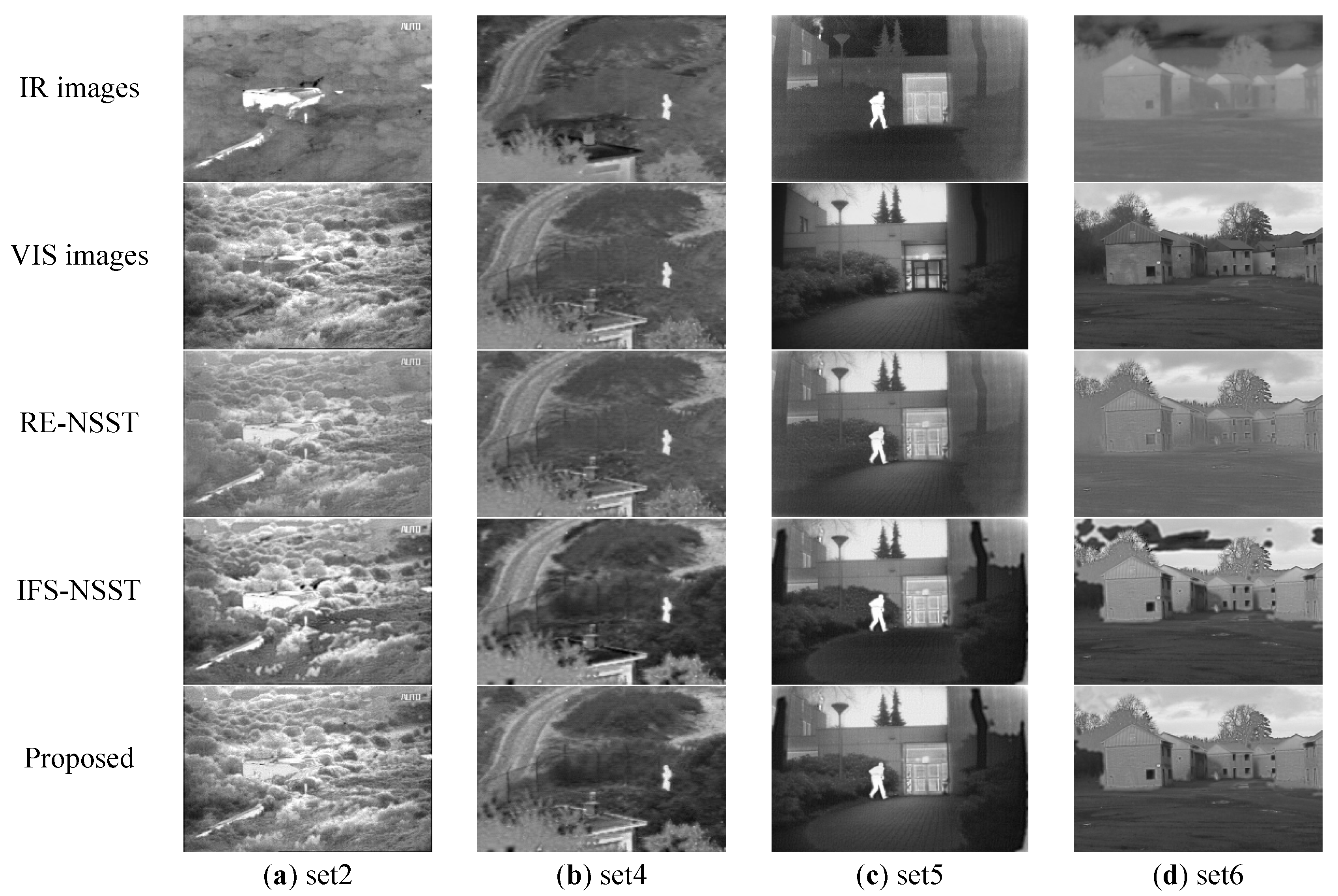
4.4.1. Comparison with RE-NSST and IFS-NSST Methods
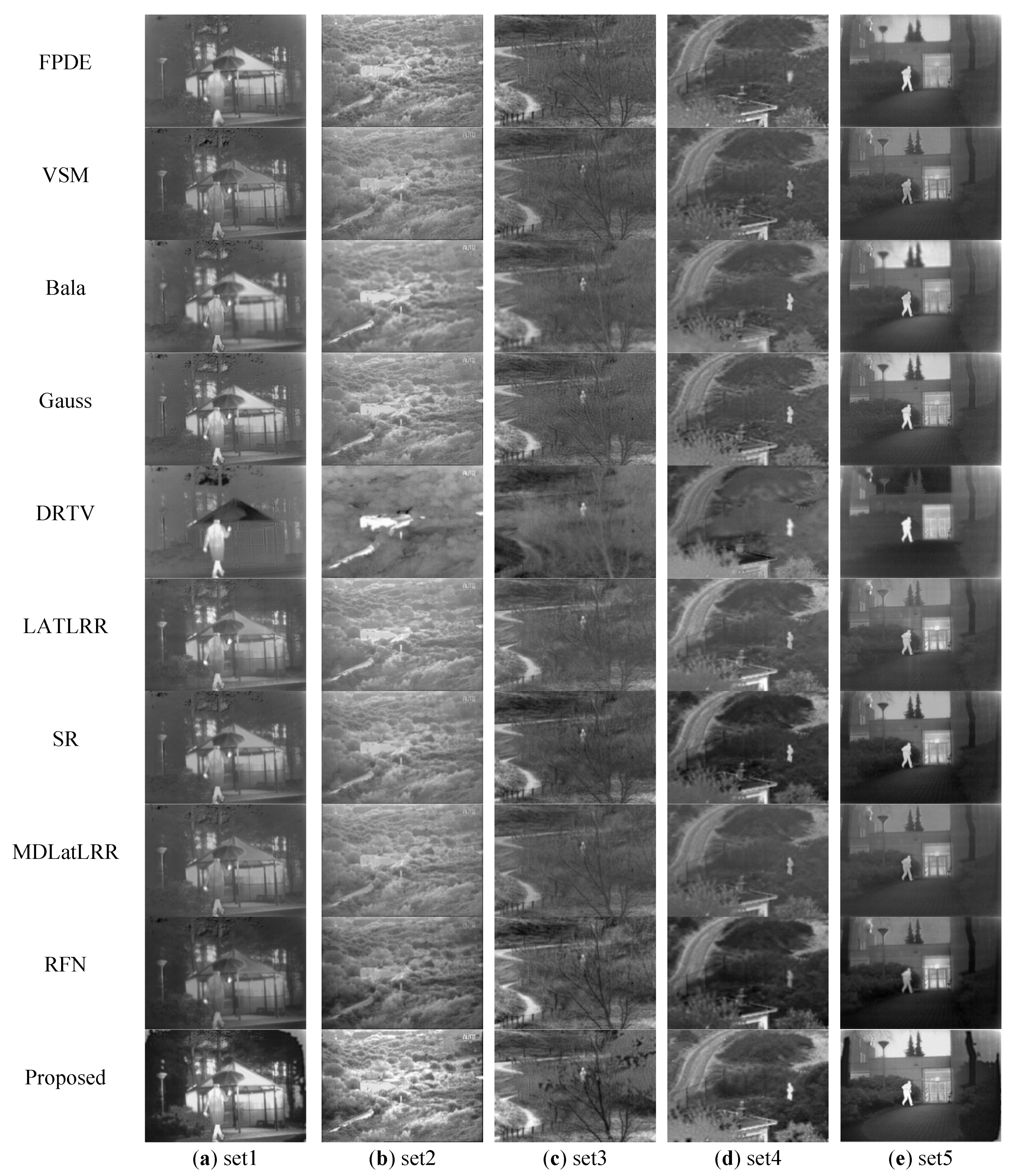
4.4.2. Comparison with the State-of-the-Art Methods
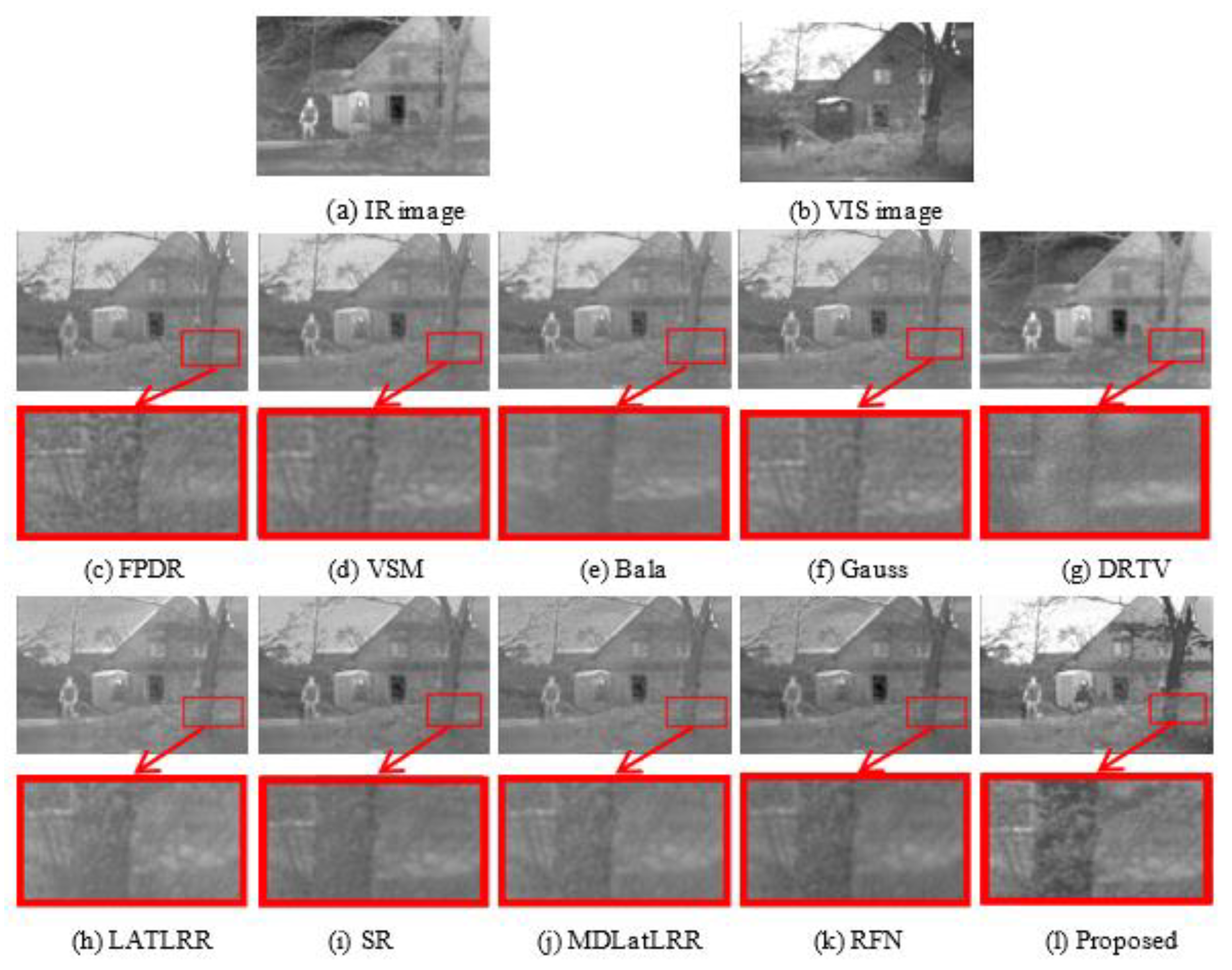
4.4.3. Analysis
- (1)
- The proposed method can transfer more detailed textures features of shrub and tree to the resulting image.
- (2)
- The proposed method can preserve obvious infrared targets information in the resulting image.
- (3)
- The proposed method can improve the image contrast and brightness.
4.5. Fusion Results on the RoadScene Dataset
4.6. The Computational Complexity Analysis
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Hu, W.; Hu, H. Discriminant Deep Feature Learning based on joint supervision Loss and Multi-layer Feature Fusion for heterogeneous face recognition. Comput. Vis. Image Underst. 2019, 184, 9–21. [Google Scholar] [CrossRef]
- Sun, H.; Liu, Q.; Wang, J.; Ren, J.; Wu, Y.; Zhao, H.; Li, H. Fusion of Infrared and Visible Images for Remote Detection of Low-Altitude Slow-Speed Small Targets. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2021, 14, 2971–2983. [Google Scholar] [CrossRef]
- Huang, H.; Dong, L.; Xue, Z.; Liu, X.; Hua, C. Fusion algorithm of visible and infrared image based on anisotropic diffusion and image enhancement. PLoS ONE 2021, 16, e0245563. [Google Scholar]
- Jose, J.; Gautam, N.; Tiwari, M.; Tiwari, T.; Suresh, A.; Sundararaj, V.; Mr, R. An image quality enhancement scheme employing adolescent identity search algorithm in the NSST domain for multimodal medical image fusion. Biomed. Signal Proces. Control 2021, 66, 102480. [Google Scholar] [CrossRef]
- Jin, X.; Huang, S.; Jiang, Q.; Lee, S.J.; Wu, L.; Yao, S. Semisupervised Remote Sensing Image Fusion Using Multiscale Conditional Generative Adversarial Network with Siamese Structure. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2021, 14, 7066–7084. [Google Scholar] [CrossRef]
- Qi, G.; Chang, L.; Luo, Y.; Chen, Y.; Zhu, Z.; Wang, S. A Precise Multi-Exposure Image Fusion Method Based on Low-level Features. Sensors 2020, 20, 1597. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Liu, Y.; Dong, L.; Ji, Y.; Xu, W. Infrared and Visible Image Fusion through Details Preservation. Sensors 2019, 19, 4556. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zhang, S.; Liu, F. Infrared and visible image fusion based on non-subsampled shearlet transform, regional energy, and co-occurrence filtering. Electron. Lett. 2020, 56, 761–764. [Google Scholar] [CrossRef]
- Srivastava, R.; Prakash, O.; Khare, A. Local energy-based multimodal medical image fusion in curvelet domain. IET Comput. Vis. 2016, 10, 513–527. [Google Scholar] [CrossRef]
- Liu, X.; Zhou, Y.; Wang, J. Image fusion based on shearlet transform and regional features. AEU-Int. J. Electron. Commun. 2014, 68, 471–477. [Google Scholar] [CrossRef]
- Versaci, M.; Calcagno, S.; Morabito, F.C. Fuzzy Geometrical Approach Based on Unit Hyper-Cubes for Image Contrast Enhancement. In Proceedings of the 2015 IEEE International Conference on Signal and Image Processing Applications (ICSIPA), Kuala Lumpur, Malaysia, 19–21 October 2015; pp. 488–493. [Google Scholar]
- Zhang, X.F.; Yan, H.; He, H. Multi-focus image fusion based on fractional-order derivative and intuitionistic fuzzy sets. Front. Inf. Technol. Electron. Eng. 2020, 21, 834–843. [Google Scholar] [CrossRef]
- Tirupal, T.; Mohan, B.C.; Kumar, S.S. Multimodal medical image fusion based on Sugeno’s intuitionistic fuzzy sets. ETRI J. 2017, 39, 173–180. [Google Scholar] [CrossRef]
- Seng, C.H.; Bouzerdoum, A.; Amin, M.G.; Phung, S.L. Probabilistic Fuzzy Image Fusion Approach for Radar Through Wall Sensing. IEEE Trans. Image Process. 2013, 22, 4938–4951. [Google Scholar] [CrossRef] [PubMed]
- Ma, J.; Ma, Y.; Li, C. Infrared and visible image fusion methods and applications: A survey. Inform. Fusion 2019, 45, 153–178. [Google Scholar] [CrossRef]
- Zhou, Z.H.; Tan, M. Infrared Image and Visible Image Fusion Based on Wavelet Transform. Adv. Mater. Res. 2013, 756–759, 2850–2856. [Google Scholar] [CrossRef]
- Kou, L.; Zhang, L.; Zhang, K.; Sun, J.; Han, Q.; Jin, Z. A multi-focus image fusion method via region mosaicking on Laplacian pyramids. PLoS ONE 2018, 13, e0191085. [Google Scholar] [CrossRef] [PubMed]
- Guo, L.; Dai, M.; Zhu, M. Multifocus color image fusion based on quaternion curvelet transform. Opt. Express 2012, 20, 18846–18860. [Google Scholar] [CrossRef] [PubMed]
- Mosavi, M.R.; Bisjerdi, M.H.; Rezai-Rad, G. Optimal Target-Oriented Fusion of Passive Millimeter Wave Images with Visible Images Based on Contourlet Transform. Wireless Pers. Commun. 2017, 95, 4643–4666. [Google Scholar] [CrossRef]
- Adu, J.; Gan, J.; Wang, Y.; Huang, J. Image fusion based on nonsubsampled contourlet transform for infrared and visible light image. Infrared Phys. Technol. 2013, 61, 94–100. [Google Scholar] [CrossRef]
- Fan, Z.; Bi, D.; Gao, S.; He, L.; Ding, W. Adaptive enhancement for infrared image using shearlet frame. J. Opt. 2016, 18, 085706. [Google Scholar] [CrossRef]
- Guorong, G.; Luping, X.; Dongzhu, F. Multi-focus image fusion based on non-subsampled shearlet transform. IET Image Process. 2013, 7, 633–639. [Google Scholar] [CrossRef]
- El-Hoseny, H.M.; El-Rahman, W.A.; El-Shafai, W.; El-Banby, G.M.; El-Rabaie, E.S.M.; Abd El-Samie, F.E.; Faragallah, O.S.; Mahmoud, K.R. Efficient multi-scale non-sub-sampled shearlet fusion system based on modified central force optimization and contrast enhancement. Infrared Phys. Technol. 2019, 102, 102975. [Google Scholar] [CrossRef]
- Kong, W.; Wang, B.; Lei, Y. Technique for infrared and visible image fusion based on non-subsampled shearlet transform and spiking cortical model. Infrared Phys. Technol. 2015, 71, 87–98. [Google Scholar] [CrossRef]
- Guo, K.; Labate, D. Optimally Sparse Multidimensional Representation Using Shearlets. SIAM J. Math. Anal. 2007, 39, 298–318. [Google Scholar] [CrossRef] [Green Version]
- Easley, G.; Labate, D.; Lim, W.Q. Sparse directional image representations using the discrete shearlet transform. Appl. Comput. Harmon. Anal. 2008, 25, 25–46. [Google Scholar] [CrossRef] [Green Version]
- Deschrijver, G.; Kerre, E.E. On the relationship between some extensions of fuzzy set theory. Fuzzy Sets Syst. 2003, 133, 227–235. [Google Scholar] [CrossRef]
- Bai, X. Infrared and Visual Image Fusion through Fuzzy Measure and Alternating Operators. Sensors 2015, 15, 17149–17167. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Saeedi, J.; Faez, K. Infrared and visible image fusion using fuzzy logic and population-based optimization. Appl. Soft Comput. 2012, 12, 1041–1054. [Google Scholar] [CrossRef]
- Pal, S.K.; King, R. Image enhancement using smoothing with fuzzy sets. IEEE Trans. Syst. Man Cybern. 1981, 11, 494–500. [Google Scholar]
- Selvaraj, A.; Ganesan, P. Infrared and visible image fusion using multi-scale NSCT and rolling-guidance filter. IET Image Process. 2020, 14, 4210–4219. [Google Scholar] [CrossRef]
- Yu, S.; Chen, X. Infrared and Visible Image Fusion Based on a Latent Low-Rank Representation Nested with Multiscale Geometric Transform. IEEE Access 2020, 8, 110214–110226. [Google Scholar] [CrossRef]
- Cai, H.; Zhuo, L.; Zhu, P.; Huang, Z.; Wu, X. Fusion of infrared and visible images based on non-subsampled contourlet transform and intuitionistic fuzzy set. Acta Photon. Sin. 2018, 47, 610002. [Google Scholar] [CrossRef]
- Dai, Z.; Wang, Q. Research on fusion method of visible and infrared image based on PCNN and IFS. J. Optoelectron. Laser 2020, 31, 738–744. [Google Scholar]
- Bavirisetti, D.P.; Xiao, G.; Liu, G. In Multi-Sensor Image Fusion Based on Fourth Order Partial Differential Equations. In Proceedings of the 2017 20th International Conference on Information Fusion (Fusion), Xi’an, China, 10–13 July 2017; pp. 1–9. [Google Scholar]
- Ma, J.; Zhou, Z.; Wang, B.; Zong, H. Infrared and visible image fusion based on visual saliency map and weighted least square optimization. Infrared Phys. Technol. 2017, 82, 8–17. [Google Scholar] [CrossRef]
- Jingchao, Z.; Suzhen, L.; Dawei, L.; Lifang, W.; Xiaoli, Y. Comparative Study of Intuitionistic Fuzzy Sets in Multi-band Image Fusion. Infrared Technol. 2018, 40, 881. [Google Scholar]
- Du, Q.; Xu, H.; Ma, Y.; Huang, J.; Fan, F. Fusing infrared and visible images of different resolutions via total variation model. Sensors 2018, 18, 3827. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Li, H.; Wu, X.J. Infrared and visible image fusion using latent low-rank representation. arXiv 2018, arXiv:1804.08992. [Google Scholar]
- Anantrasirichai, N.; Zheng, R.; Selesnick, I.; Achim, A. Image fusion via sparse regularization with non-convex penalties. Pattern Recogn. Lett. 2020, 131, 355–360. [Google Scholar] [CrossRef] [Green Version]
- Li, H.; Wu, X.J.; Kittler, J. MDLatLRR: A novel decomposition method for infrared and visible image fusion. IEEE Trans. Image Process. 2020, 29, 4733–4746. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Li, H.; Wu, X.J.; Kittler, J. RFN-Nest: An end-to-end residual fusion network for infrared and visible images. Inf. Fusion 2021, 73, 72–86. [Google Scholar] [CrossRef]
- Xing, X.X.; Liu, C.; Luo, C.; Xu, T. Infrared and visible image fusion based on nonlinear enhancement and NSST decomposition. EURASIP J. Wirel. Commun. Netw. 2020, 2020, 162. [Google Scholar] [CrossRef]
- Yang, Y.C.; Li, J.; Wang, Y.P. Review of image fusion quality evaluation methods. J. Front. Comput. Sci. Technol. 2018, 12, 1021–1035. [Google Scholar]
- Guo, Q.; Liu, S. Performance analysis of multi-spectral and panchromatic image fusion techniques based on two wavelet discrete approaches. Optik 2011, 122, 811–819. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Pictures | Algorithm | E | AG | MI | CE | SPD | PSNR |
|---|---|---|---|---|---|---|---|
| set2 | RE-NSST | 7.0231 | 7.8391 | 1.5491 | 0.4003 | 20.2137 | 18.6581 |
| IFS-NSST | 7.4985 | 8.2866 | 1.6744 | 0.4143 | 17.9667 | 17.4212 | |
| Proposed | 7.5003 | 8.1158 | 2.1463 | 0.3881 | 9.1239 | 21.3318 | |
| set4 | RE-NSST | 6.6502 | 6.6127 | 1.3885 | 1.1583 | 27.0561 | 16.3921 |
| IFS-NSST | 7.1960 | 6.9817 | 1.5673 | 0.4401 | 23.0697 | 16.2754 | |
| Proposed | 7.2065 | 6.8724 | 1.7395 | 0.2678 | 16.6751 | 17.9727 | |
| set5 | RE-NSST | 7.1367 | 5.0369 | 2.1408 | 0.8499 | 30.3678 | 14.9696 |
| IFS-NSST | 7.4193 | 5.2169 | 2.1355 | 0.7068 | 22.5062 | 15.6012 | |
| Proposed | 7.5317 | 5.2223 | 2.2287 | 0.4438 | 17.1070 | 16.7450 | |
| set6 | RE-NSST | 6.7152 | 5.1251 | 2.3817 | 2.5125 | 30.7200 | 17.3706 |
| IFS-NSST | 7.1657 | 5.6524 | 2.7181 | 1.4545 | 23.0795 | 14.9469 | |
| Proposed | 7.1764 | 5.2818 | 3.0924 | 1.2185 | 10.6998 | 22.1216 |
| Algorithm | E | AG | MI | CE | SPD | PSNR |
|---|---|---|---|---|---|---|
| FPDE | 6.6385 | 5.1961 | 1.5334 | 1.1573 | 25.8568 | 17.8237 |
| VSM | 6.5374 | 5.0431 | 1.1345 | 1.5274 | 30.3846 | 15.9714 |
| Bala | 6.7515 | 2.5025 | 1.3897 | 0.6556 | 28.1342 | 16.8945 |
| Gauss | 6.7573 | 3.3446 | 1.4076 | 1.5874 | 27.1725 | 17.3515 |
| DRTV | 7.0767 | 4.9648 | 1.9273 | 0.8521 | 60.3667 | 10.0039 |
| LATLRR | 6.6468 | 3.3042 | 1.1525 | 1.2658 | 31.8783 | 15.9835 |
| SR | 6.6610 | 3.4351 | 1.7760 | 1.6768 | 27.7083 | 17.1956 |
| MDLatLRR | 6.6913 | 3.9260 | 1.8946 | 0.4422 | 134.4224 | 5.3021 |
| RFN | 6.6424 | 2.7265 | 1.1956 | 1.4660 | 30.4971 | 15.5273 |
| Proposed | 7.1322 | 5.6427 | 2.0628 | 0.2455 | 14.5461 | 19.2055 |
| Images | FPDE | VSM | Bala | Gauss | DRTV | LATLRR | SR | MDLatLRR | RFN | Proposed |
|---|---|---|---|---|---|---|---|---|---|---|
| set1 | 11.0281 | 2.1048 | 32.5587 | 33.2193 | 0.8448 | 105.9846 | 6.0897 | 150.6458 | 10.6317 | 3.1674 |
| set2 | 18.6852 | 3.6156 | 49.1194 | 49.3599 | 1.3805 | 111.3046 | 10.266 | 186.3398 | 11.4100 | 4.8280 |
| set3 | 10.2954 | 2.2599 | 31.4941 | 31.0160 | 0.8172 | 99.6353 | 5.9340 | 180.6707 | 11.9672 | 3.1971 |
| set4 | 1.7641 | 0.8080 | 22.3608 | 19.6283 | 0.2517 | 33.6849 | 1.7168 | 80.0596 | 12.7350 | 1.3497 |
| set5 | 10.8291 | 2.1046 | 32.4518 | 32.0341 | 0.8023 | 106.767 | 6.3531 | 161.4593 | 13.6248 | 3.1962 |
| Images | FPDE | VSM | Bala | Gauss | DRTV | LATLRR | SR | MDLatLRR | RFN | Proposed |
|---|---|---|---|---|---|---|---|---|---|---|
| set1 | 5.3412 | 2.0977 | 36.0400 | 37.9651 | 0.4194 | 104.1814 | 3.1564 | 153.4153 | 9.7678 | 2.3402 |
| set2 | 2.6183 | 3.0216 | 17.0855 | 19.6853 | 0.2962 | 75.0036 | 1.7318 | 95.97211 | 10.8458 | 1.5268 |
| set3 | 7.6224 | 4.6006 | 24.3446 | 25.7651 | 0.5192 | 112.2796 | 3.1698 | 192.0942 | 11.7744 | 1.9909 |
| set4 | 2.7065 | 5.3109 | 14.0975 | 15.7018 | 0.2460 | 55.0571 | 1.5370 | 76.53124 | 12.1473 | 1.2707 |
| set5 | 6.1202 | 6.8466 | 23.5806 | 25.0931 | 0.4660 | 103.0710 | 3.0122 | 162.6771 | 13.0335 | 1.9509 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xing, X.; Luo, C.; Zhou, J.; Yan, M.; Liu, C.; Xu, T. Combining Regional Energy and Intuitionistic Fuzzy Sets for Infrared and Visible Image Fusion. Sensors 2021, 21, 7813. https://doi.org/10.3390/s21237813
Xing X, Luo C, Zhou J, Yan M, Liu C, Xu T. Combining Regional Energy and Intuitionistic Fuzzy Sets for Infrared and Visible Image Fusion. Sensors. 2021; 21(23):7813. https://doi.org/10.3390/s21237813
Chicago/Turabian StyleXing, Xiaoxue, Cong Luo, Jian Zhou, Minghan Yan, Cheng Liu, and Tingfa Xu. 2021. "Combining Regional Energy and Intuitionistic Fuzzy Sets for Infrared and Visible Image Fusion" Sensors 21, no. 23: 7813. https://doi.org/10.3390/s21237813
APA StyleXing, X., Luo, C., Zhou, J., Yan, M., Liu, C., & Xu, T. (2021). Combining Regional Energy and Intuitionistic Fuzzy Sets for Infrared and Visible Image Fusion. Sensors, 21(23), 7813. https://doi.org/10.3390/s21237813