
Two Simultaneous Leak Diagnosis in Pipelines Based on Input–Output Numerical Differentiation

 , ,
, ,
Abstract
:1. Introduction
1.1. Problem Statement
- In a real pipeline system, several leaks can occur and usually they are not fixed as they appear; this means that the leak problem becomes a challenging multi-leak problem known as the simultaneous leak case. In addition, this situation worsens when water management companies frequently lack flow rate and pressure head records of the leak events.
- Therefore, a methodology to address the simultaneous leak case is proposed on the basis of an input–output numerical differentiation-based strategy by applying a persistent input in the sense of [11].
1.2. Methods
- By considering a state-space representation of a pipeline with two leaks in which the leak parameters are considered as new state variables with constant dynamics, the extended state can be reconstructed via its expression in terms of input, output, and the corresponding time derivatives.
- A persistent input is experimentally generated via a frequency variation of the pump driver that produces a sine-like pressure signal. This persistent input allows the parameters of each leak to be reconstructed. This approach could be extended to a more general case of simultaneous leaks if the applied input is regularly persistent, such that the observability condition is guaranteed [11]. However, this approach could also be limited to physical constraints since a persistent input might cause additional leaks due to the flow transient effect that it produces.
2. Preliminaries
2.1. Pipeline Mathematical Model
2.1.1. Governing Equations
2.1.2. Finite Difference Approximation
2.1.3. Pipeline Equivalent Straight Length
2.1.4. Friction Model
2.2. Two Simultaneous Leak Problem Statement
3. State Vector Reconstruction Based on Input–Output Numerical Differentiation
3.1. Observability Discussion
3.2. Numerical Differentiation with Annihilators
- Let be the m-th order polynomial approximation of ,
- Transforming Equation (19) into Laplace domain yields:
- In order to calculate the i-th time derivative approximation, , it is necessary to first annihilate every () in (20), using the next operator:
- Then, to annihilate every (), the following operator is subsequently applied to Equation (20):
- Now, multiplying both sides of the above equation by yields a polynomial taking the following form:
- Using the Cauchy rule for iterated integrals, the time domain expression for in Equation (24) yields:
3.3. Extended State Vector Reconstruction
4. Experimental Results
4.1. Pilot Pipeline Description
4.2. LDI Results
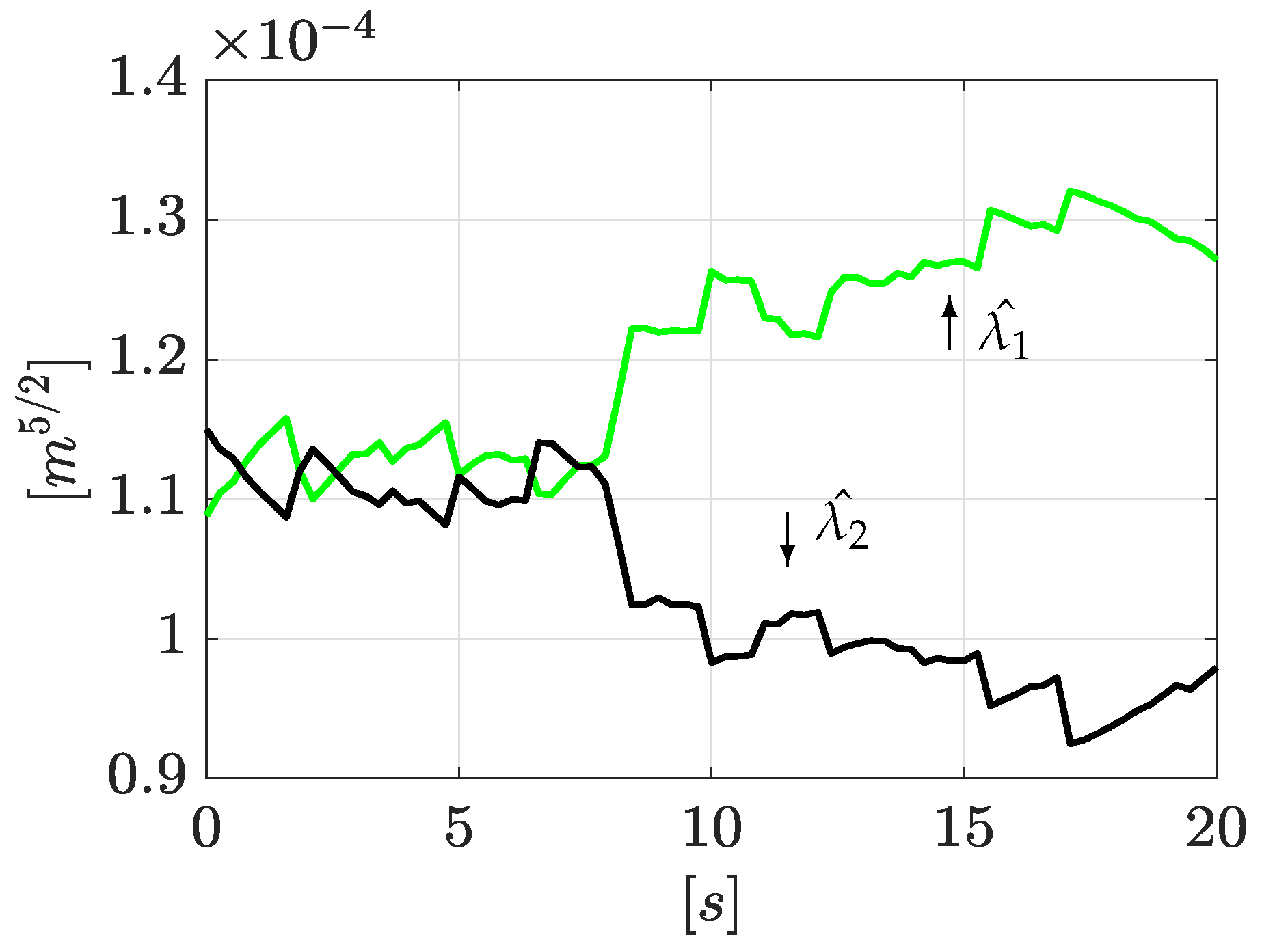
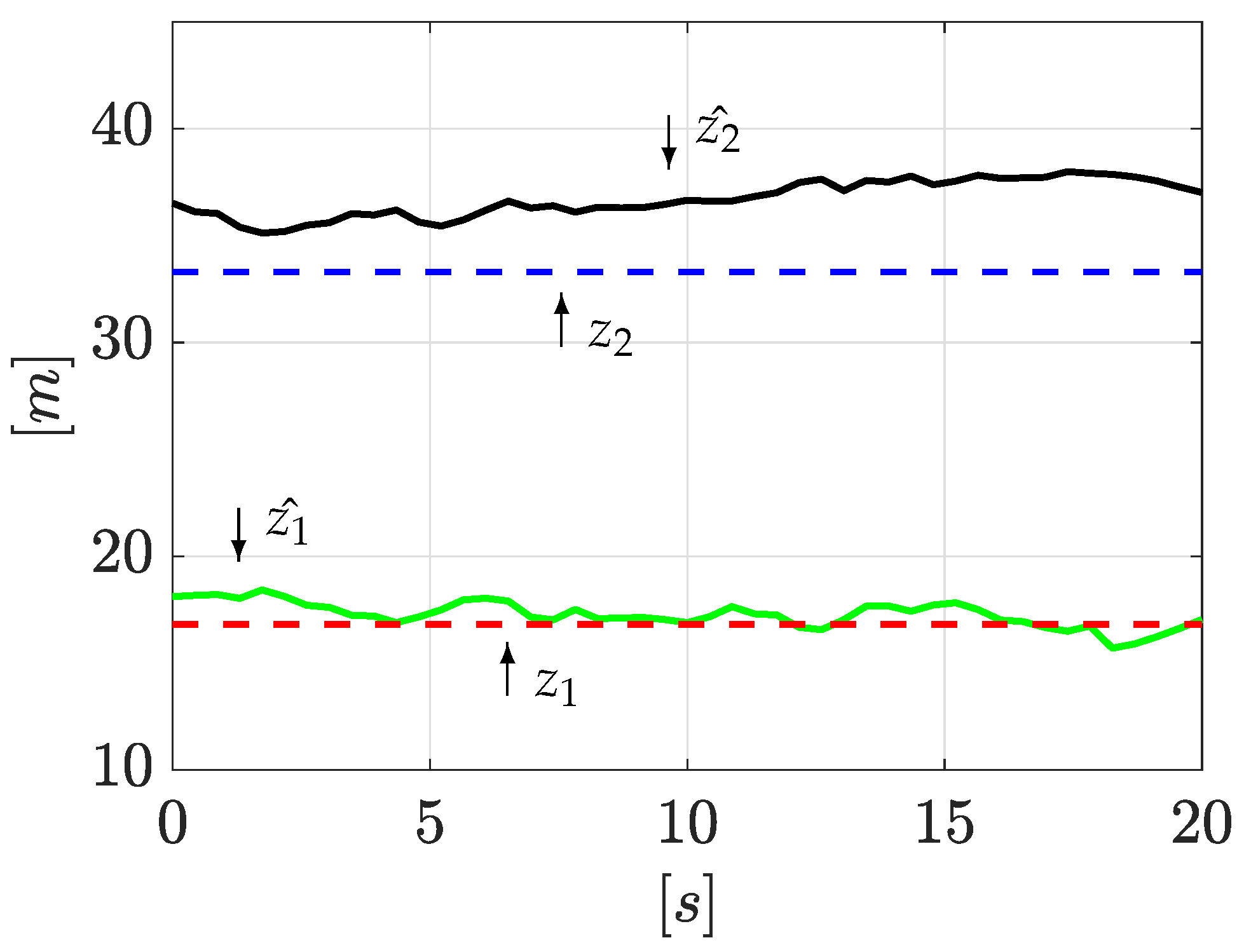
4.2.1. Experiment 1: Leaks Induced in Valves and
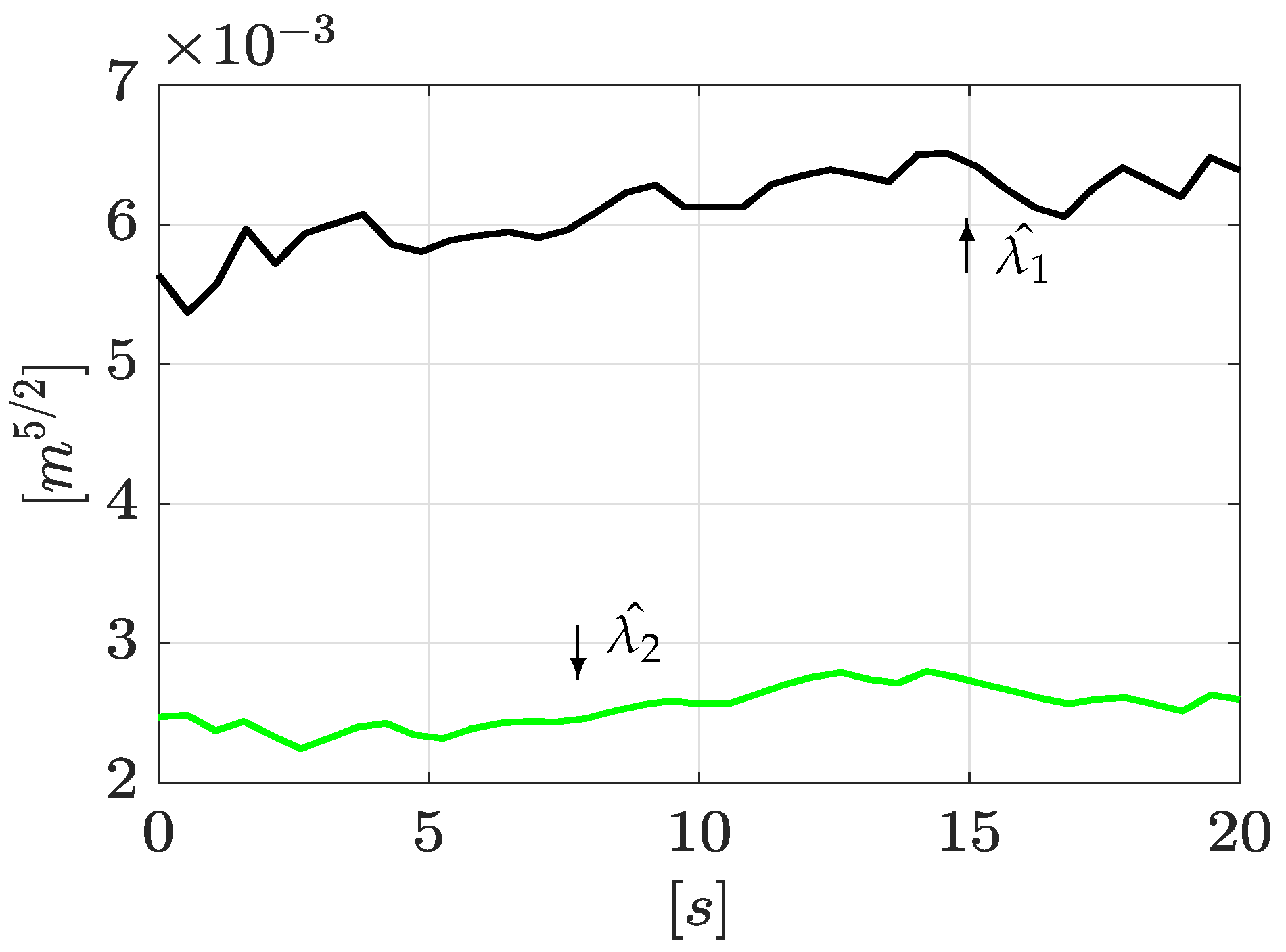
4.2.2. Experiment 2: Leaks Induced in Valve and
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- OECD. Water Governance in Cities; OECD: Paris, France, 2016; p. 140. [Google Scholar] [CrossRef]
- Navarro, A.; Begovich, O.; Sánchez, J.; Besancon, G. Real-Time Leak Isolation Based on State Estimation with Fitting Loss Coefficient Calibration in a Plastic Pipeline. Asian J. Control 2017, 19, 255–265. [Google Scholar] [CrossRef]
- Santos-Ruíz, I.; Bermúdez, J.; López-Estrada, F.; Puig, V.; Torres, L.; Delgado-Aguiñaga, J. Online leak diagnosis in pipelines using an EKF-based and steady-state mixed approach. Control Eng. Pract. 2018, 81, 55–64. [Google Scholar] [CrossRef]
- Navarro, A.; Delgado-Aguiñaga, J.A.; Sánchez-Torres, J.D.; Begovich, O.; Besançon, G. Evolutionary Observer Ensemble for Leak Diagnosis in Water Pipelines. Processes 2019, 7, 913. [Google Scholar] [CrossRef] [Green Version]
- Pérez-Pérez, E.; López-Estrada, F.; Valencia-Palomo, G.; Torres, L.; Puig, V.; Mina-Antonio, J. Leak diagnosis in pipelines using a combined artificial neural network approach. Control Eng. Pract. 2021, 107, 104677. [Google Scholar] [CrossRef]
- Delgado-Aguiñaga, J.; Puig, V.; Becerra-López, F. Leak diagnosis in pipelines based on a Kalman filter for Linear Parameter Varying systems. Control Eng. Pract. 2021, 115, 104888. [Google Scholar] [CrossRef]
- Delgado-Aguiñaga, J.; Besançon, G.; Begovich, O.; Carvajal, J. Multi-leak diagnosis in pipelines based on Extended Kalman Filter. Control Eng. Pract. 2016, 49, 139–148. [Google Scholar] [CrossRef]
- Rojas, J.; Verde, C. Adaptive estimation of the hydraulic gradient for the location of multiple leaks in pipelines. Control Eng. Pract. 2020, 95, 104226. [Google Scholar] [CrossRef]
- Fu, H.; Wang, S.; Ling, K. Detection of two-point leakages in a pipeline based on lab investigation and numerical simulation. J. Pet. Sci. Eng. 2021, 204, 108747. [Google Scholar] [CrossRef]
- Torres, L.; Besançon, G.; Georges, D. Multi-leak estimator for pipelines based on an orthogonal collocation model. In Proceedings of the 48h IEEE Conference on Decision and Control (CDC) held jointly with 2009 28th Chinese Control Conference, Shanghai, China, 15–18 December 2009; pp. 410–415. [Google Scholar] [CrossRef]
- Besançon, G. Nonlinear Observers and Applications; Springer: Berlin/Heidelberg, Germany, 2007; Volume 363. [Google Scholar]
- Torres, L.; Besançon, G.; Georges, D.; Navarro, A.; Begovich, O. Examples of pipeline monitoring with nonlinear observers and real-data validation. In Proceedings of the 8th International Multi-Conference on Systems, Signals and Devices, Sousse, Tunisia, 22–25 March 2011. [Google Scholar]
- Roberson, J.A.; Cassidy, J.J.; Chaudhry, M.H. Hydraulic Engineering; John Wiley & Sons: Hoboken, NJ, USA, 1998. [Google Scholar]
- Verde, C. Accommodation of multi-leak location in a pipeline. Control Eng. Pract. 2005, 13, 1071–1078. [Google Scholar] [CrossRef]
- Besançon, G.; Georges, D.; Begovich, O.; Verde, C.; Aldana, C. Direct observer design for leak detection and estimation in pipelines. In Proceedings of the 2007 European Control Conference (ECC), Kos, Greece, 2–5 July 2007; pp. 5666–5670. [Google Scholar]
- Mott, R.L.; Noor, F.M.; Aziz, A.A. Applied Fluid Mechanics; Pearson Prentice Hall: Singapore, 2006. [Google Scholar]
- Navarro, A.; Begovich, O.; Besancon, G. Calibration of fitting loss coefficients for modelling purpose of a plastic pipeline. In Proceedings of the ETFA2011, Toulouse, France, 5–9 September 2011; pp. 1–6. [Google Scholar]
- Takacs, G. Sucker-Rod Pumping Handbook: Production Engineering Fundamentals and Long-Stroke Rod Pumping; Gulf Professional Publishing: Houston, TX, USA, 2015. [Google Scholar]
- E Shashi Menon, P. Piping Calculations Manual; McGraw-Hill Education: New York, NY, USA, 2005. [Google Scholar]
- Diop, S.; Fliess, M. Nonlinear observability, identifiability, and persistent trajectories. In Proceedings of the 30th IEEE Conference on Decision and Control, Brighton, UK, 11–13 December 1991; pp. 714–719. [Google Scholar]
- Isidori, A. Nonlinear Control Systems; Springer: Berlin/Heidelberg, Germany, 1995. [Google Scholar]
- Diop, S. Elimination in control theory. Math. Control. Signals Syst. 1991, 4, 17–32. [Google Scholar] [CrossRef]
- Mboup, M.; Join, C.; Fliess, M. Numerical differentiation with annihilators in noisy environment. Numer. Algorithms 2009, 50, 439–467. [Google Scholar] [CrossRef] [Green Version]
- Rotoplas. Tuboplus: Mejor Tubería, Mejor Agua; Rotoplas: Mexico City, Mexico, 2018. [Google Scholar]
- Begovich, O.; Pizano-Moreno, A.; Besançon, G. Online implementation of a leak isolation algorithm in a plastic pipeline prototype. Lat. Am. Appl. Res. 2012, 42, 131–140. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Symbol | Value | Units |
|---|---|---|---|
| Pipeline length | 68.2 | [m] | |
| Upstream to valve | 16.8 | [m] | |
| Upstream to valve | 33.3 | [m] | |
| Upstream to valve | 49.8 | [m] | |
| Internal diameter | [m] | ||
| Pipe roughness | [m] | ||
| Friction factor | [dimensionless] | ||
| Pressure wave speed | b | 358 | [m/s] |
| Gravity acceleration | g | [m/s] |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Navarro-Díaz, A.; Delgado-Aguiñaga, J.-A.; Begovich, O.; Besançon, G. Two Simultaneous Leak Diagnosis in Pipelines Based on Input–Output Numerical Differentiation. Sensors 2021, 21, 8035. https://doi.org/10.3390/s21238035
Navarro-Díaz A, Delgado-Aguiñaga J-A, Begovich O, Besançon G. Two Simultaneous Leak Diagnosis in Pipelines Based on Input–Output Numerical Differentiation. Sensors. 2021; 21(23):8035. https://doi.org/10.3390/s21238035
Chicago/Turabian StyleNavarro-Díaz, Adrián, Jorge-Alejandro Delgado-Aguiñaga, Ofelia Begovich, and Gildas Besançon. 2021. "Two Simultaneous Leak Diagnosis in Pipelines Based on Input–Output Numerical Differentiation" Sensors 21, no. 23: 8035. https://doi.org/10.3390/s21238035
APA StyleNavarro-Díaz, A., Delgado-Aguiñaga, J. -A., Begovich, O., & Besançon, G. (2021). Two Simultaneous Leak Diagnosis in Pipelines Based on Input–Output Numerical Differentiation. Sensors, 21(23), 8035. https://doi.org/10.3390/s21238035