
Robust Data-Driven Leak Localization in Water Distribution Networks Using Pressure Measurements and Topological Information



Abstract
:1. Introduction
2. Water Distribution Networks
2.1. Preliminaries
2.2. Structure of the Reduced Order Model
3. Leak Localization
3.1. Leak Localization at Cluster Level
3.2. Leak Localization at Node Level
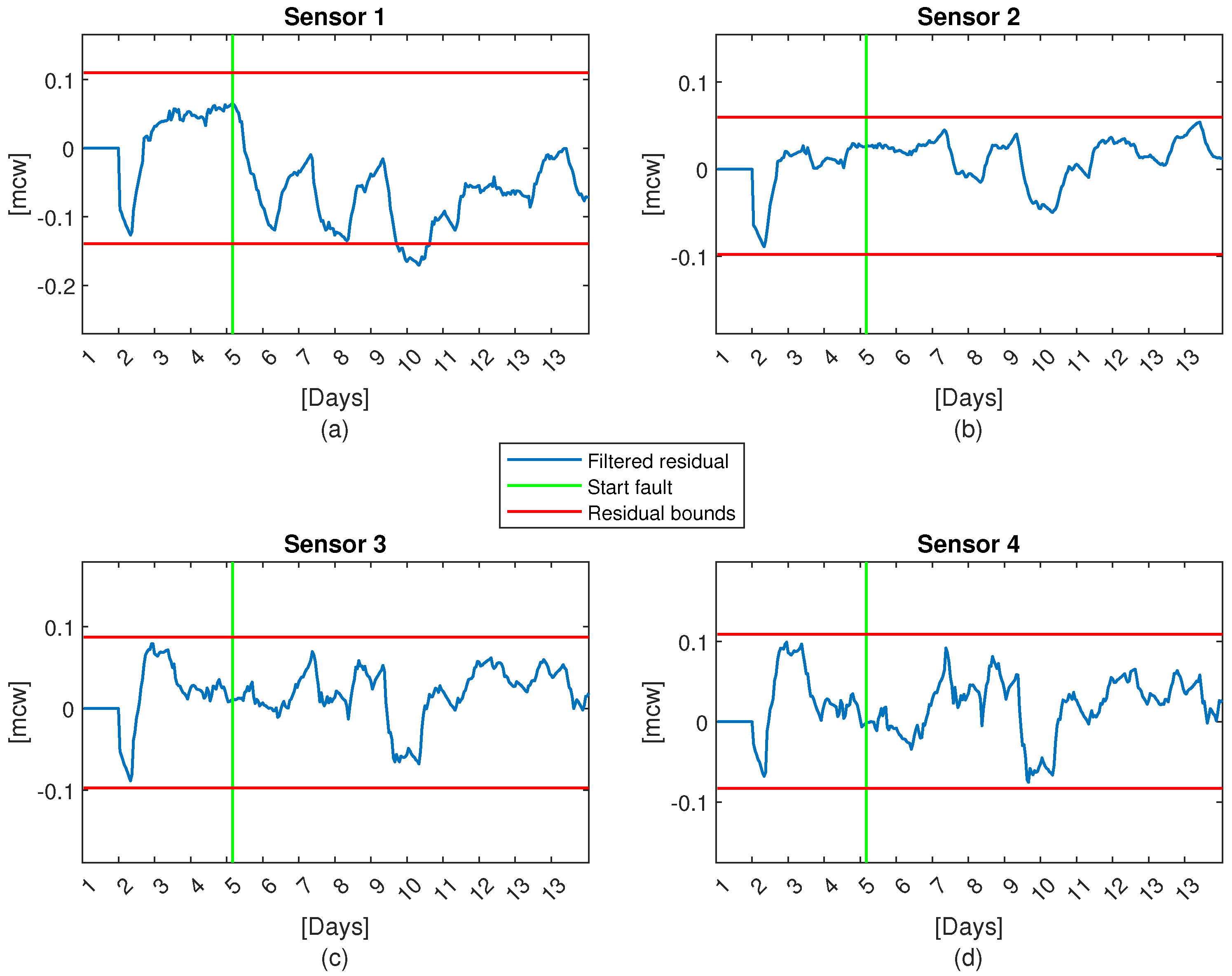
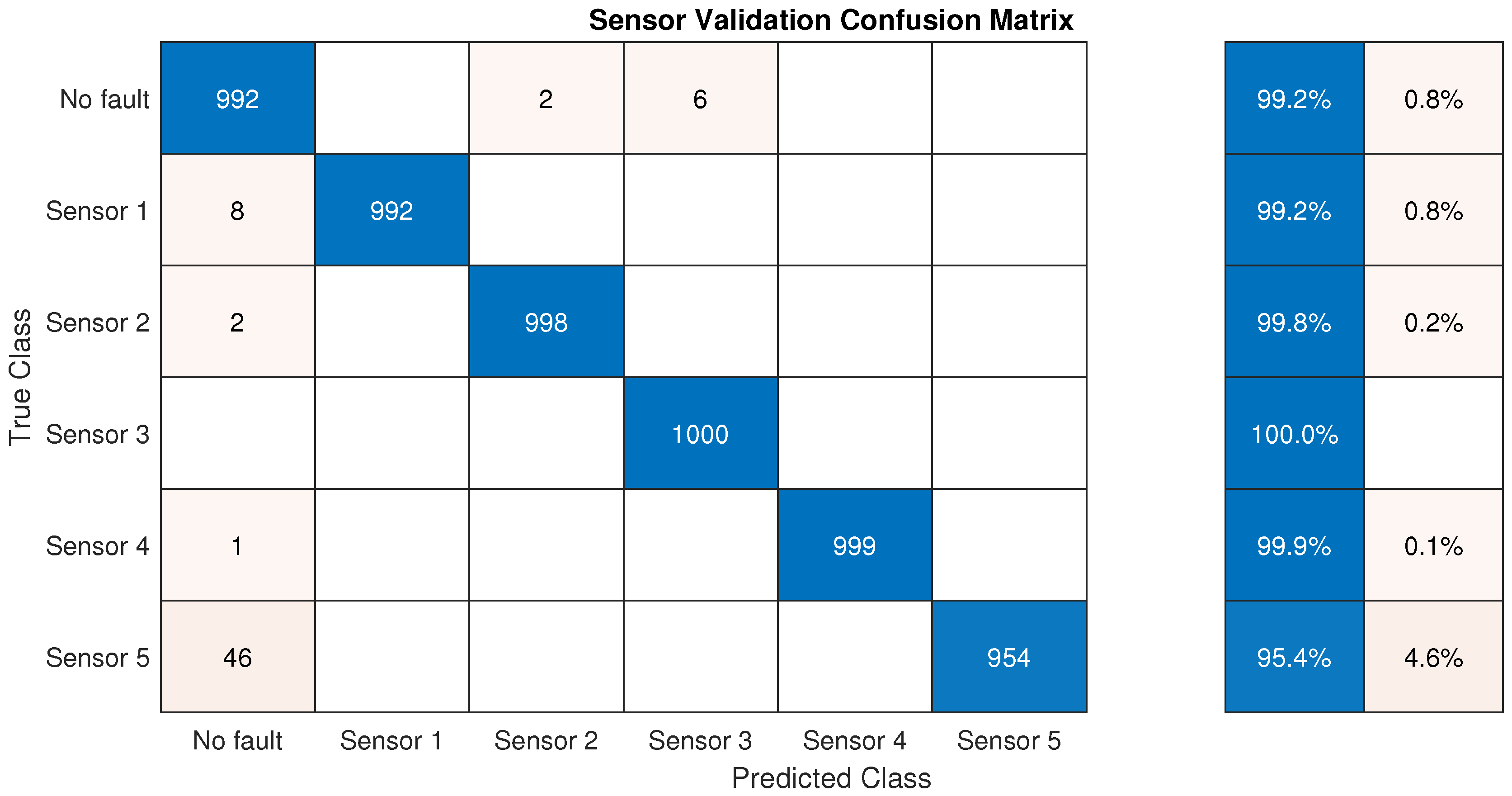
4. Sensor Validation
| Algorithm 1 Sensor validation search for sensor fault |
|
| 1: for do |
| 2: for do |
| 3: for then |
|
4:
|
| 5: Discard sensor , eliminate faulty signals related to this sensors, update . |
| 6: end if |
| 7: end for |
| 8: end for |
5. Case Study
5.1. Hanoi WDN
Results
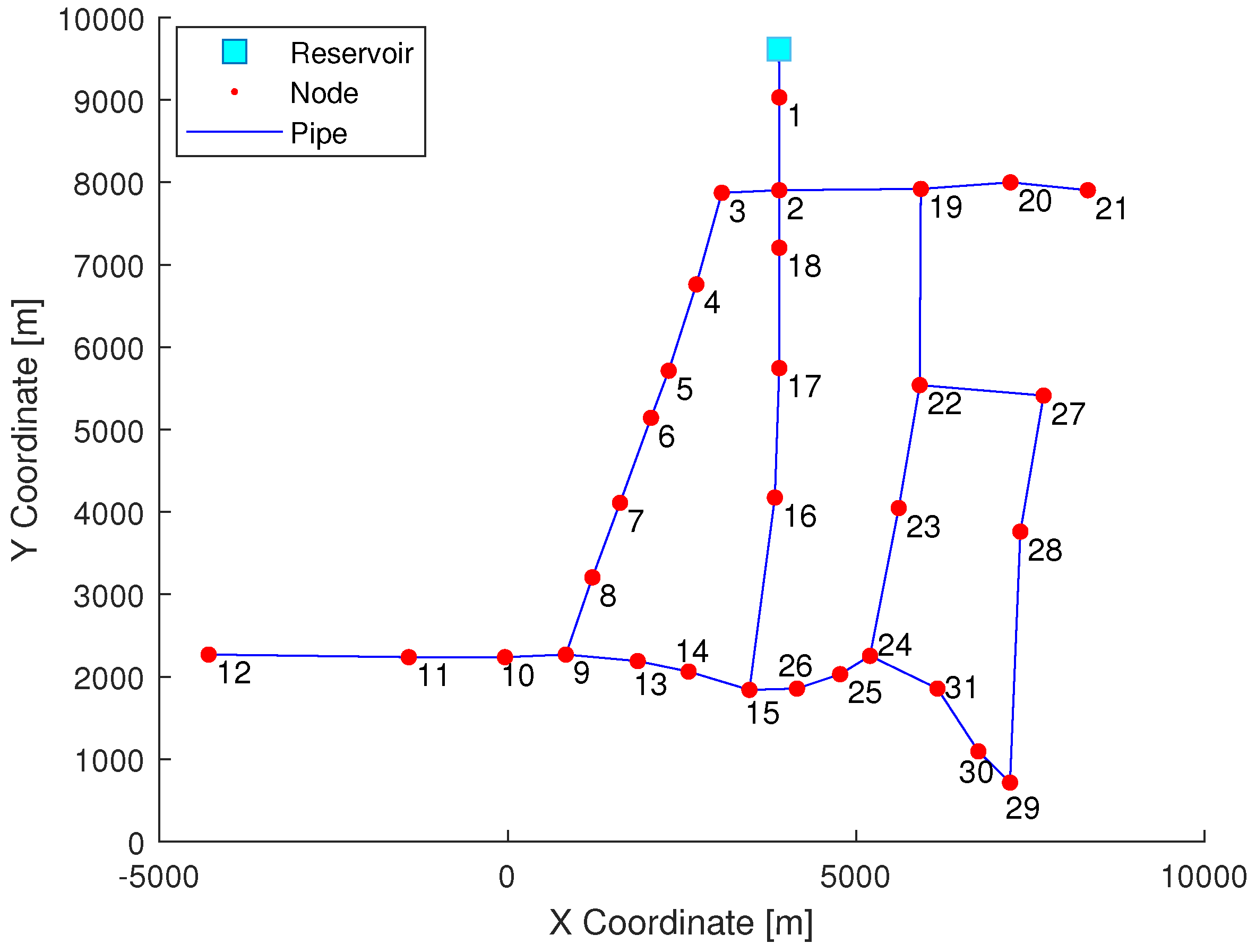
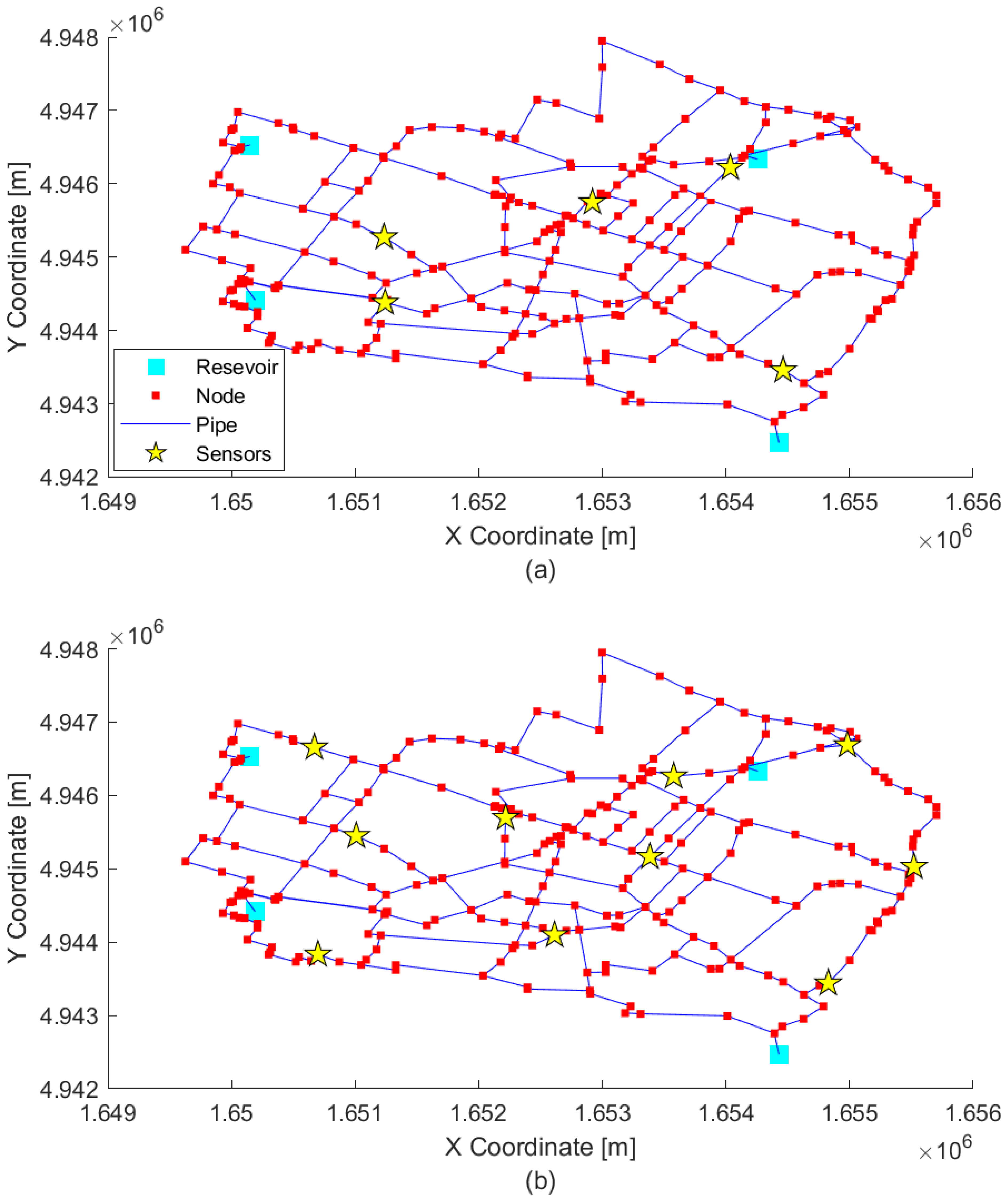
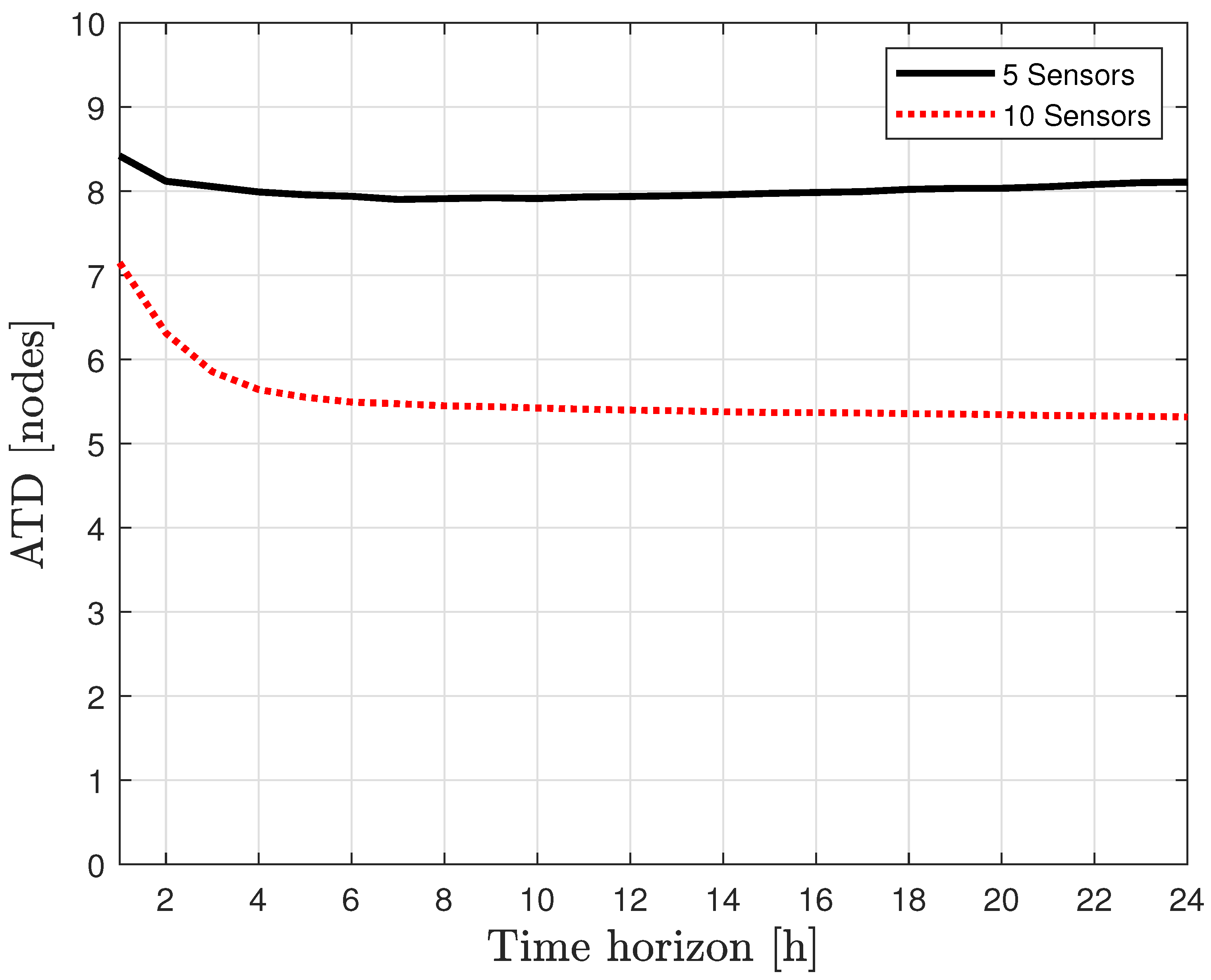
5.2. Modena WDN
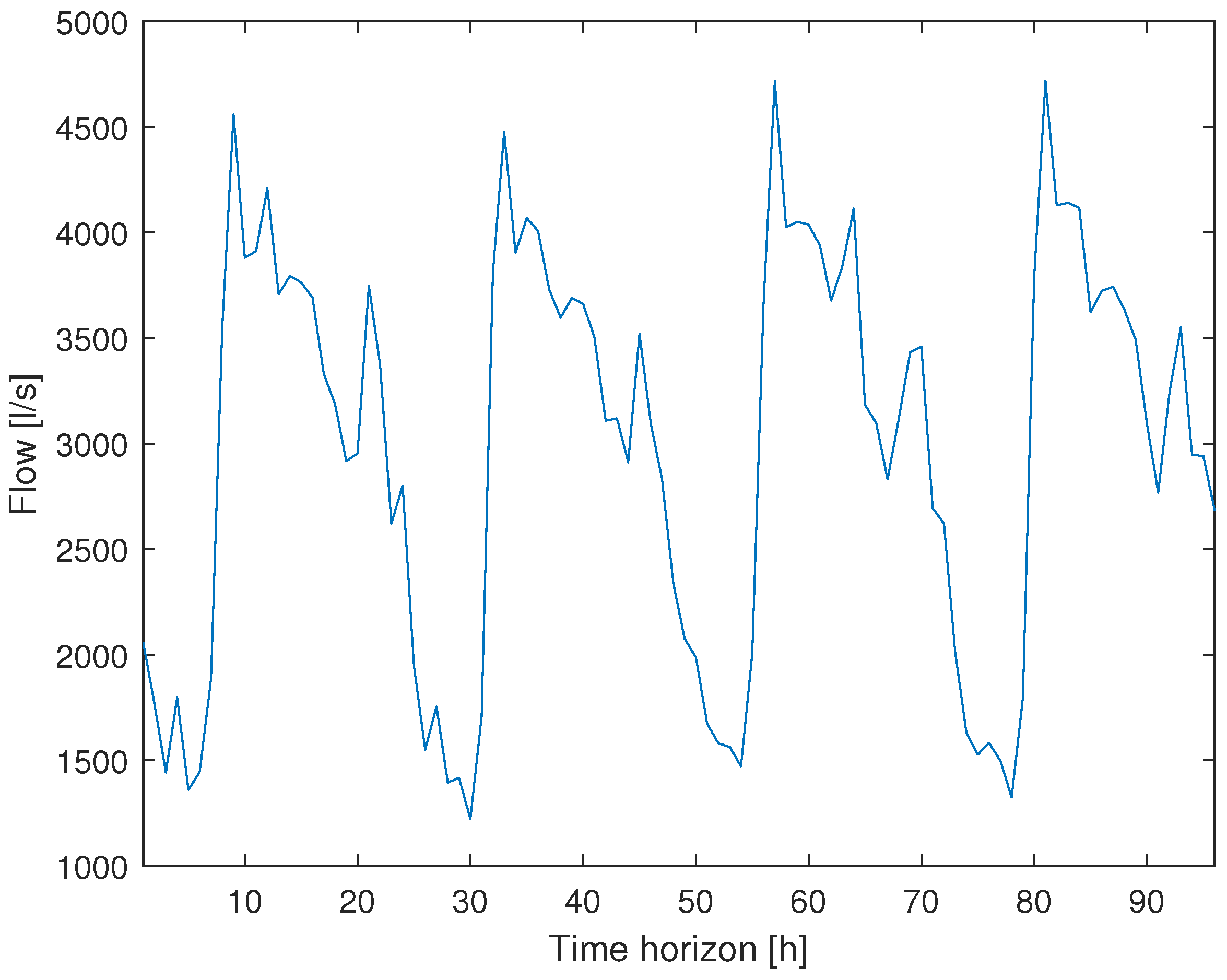
- The leak scenario consists of data samples collected every 10 min and filtered to hourly values to reduce the uncertainty in the data;
- The uncertainty of demand is considered by introducing the uncertainty of 10 [%] (normal distribution) of the nominal demand value. In addition, white noise is deemed to emulate the noise in the measurements;
- The leak size is randomly selected with a range of 3 to 6 [l/s], representing 1% to 2.5% of the network consumption.
Results
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Puust, R.; Kapelan, Z.; Savic, D.; Koppel, T. A review of methods for leakage management in pipe networks. Urban Water J. 2010, 7, 25–45. [Google Scholar] [CrossRef]
- Gosling, S.N.; Arnell, N.W. A global assessment of the impact of climate change on water scarcity. Clim. Chang. 2016, 134, 371–385. [Google Scholar] [CrossRef] [Green Version]
- Liemberger, R.; Wyatt, A. Quantifying the global non-revenue water problem. Water Supply 2019, 19, 831–837. [Google Scholar] [CrossRef]
- Muggleton, J.; Brennan, M.; Pinnington, R.; Gao, Y. A novel sensor for measuring the acoustic pressure in buried plastic water pipes. J. Sound Vib. 2006, 295, 1085–1098. [Google Scholar] [CrossRef]
- Shimanskiy, S.; Iijima, T.; Naoi, Y. Development of microphone leak detection technology on Fugen NPP. Prog. Nucl. Energy 2003, 43, 357–364. [Google Scholar] [CrossRef]
- Hunaidi, O.; Chu, W.; Wang, A.; Guan, W. Detecting leaks in plastic pipes. J.-Am. Water Work. Assoc. 2000, 92, 82–94. [Google Scholar] [CrossRef] [Green Version]
- Pérez, R.; Puig, V.; Pascual, J.; Quevedo, J.; Landeros, E.; Peralta, A. Methodology for leakage isolation using pressure sensitivity analysis in water distribution networks. Control Eng. Pract. 2011, 19, 1157–1167. [Google Scholar] [CrossRef] [Green Version]
- Casillas, M.V.; Garza-Castañón, L.E.; Puig, V.; Vargas-Martinez, A. Leak signature space: An original representation for robust leak location in water distribution networks. Water 2015, 7, 1129–1148. [Google Scholar] [CrossRef]
- Pérez, R.; Cugueró, J.; Sanz, G.; Cugueró, M.A.; Blesa, J. Leak Monitoring. In Real-Time Monitoring and Operational Control of Drinking-Water Systems; Puig, V., Ocampo-Martínez, C., Pérez, R., Cembrano, G., Quevedo, J., Escobet, T., Eds.; Springer International Publishing: Cham, Switzerland, 2017; pp. 115–130. [Google Scholar]
- Vrachimis, S.G.; Timotheou, S.; Eliades, D.G.; Polycarpou, M.M. Leakage detection and localization in water distribution systems: A model invalidation approach. Control Eng. Pract. 2021, 110, 104755. [Google Scholar] [CrossRef]
- Soldevila, A.; Blesa, J.; Tornil-Sin, S.; Duviella, E.; Fernandez-Canti, R.M.; Puig, V. Leak localization in water distribution networks using a mixed model-based/data-driven approach. Control Eng. Pract. 2016, 55, 162–173. [Google Scholar] [CrossRef] [Green Version]
- Quiñones-Grueiro, M.; Bernal-de Lázaro, J.M.; Verde, C.; Prieto-Moreno, A.; Llanes-Santiago, O. Comparison of Classifiers for Leak Location in Water Distribution Networks. IFAC-PapersOnLine 2018, 51, 407–413. [Google Scholar] [CrossRef]
- Sun, C.; Parellada, B.; Puig, V.; Cembrano, G. Leak localization in water distribution networks using pressure and data-driven classifier approach. Water 2020, 12, 54. [Google Scholar] [CrossRef] [Green Version]
- Santos-Ruiz, I.; Blesa, J.; Puig, V.; López-Estrada, F. Leak localization in water distribution networks using classifiers with cosenoidal features. IFAC-PapersOnLine 2020, 53, 16697–16702. [Google Scholar] [CrossRef]
- Javadiha, M.; Blesa, J.; Soldevila, A.; Puig, V. Leak Localization in Water Distribution Networks using Deep Learning. In Proceedings of the 2019 6th International Conference on Control, Decision and Information Technologies (CoDIT), Paris, France, 23–26 April 2019; pp. 1426–1431. [Google Scholar] [CrossRef] [Green Version]
- Pérez-Pérez, E.; López-Estrada, F.; Valencia-Palomo, G.; Torres, L.; Puig, V.; Mina-Antonio, J. Leak diagnosis in pipelines using a combined artificial neural network approach. Control Eng. Pract. 2021, 107, 104677. [Google Scholar] [CrossRef]
- Wu, Y.; Liu, S. A review of data-driven approaches for burst detection in water distribution systems. Urban Water J. 2017, 14, 972–983. [Google Scholar] [CrossRef]
- Soldevila, A.; Blesa, J.; Fernandez-Canti, R.M.; Tornil-Sin, S.; Puig, V. Data-driven approach for leak localization in water distribution networks using pressure sensors and spatial interpolation. Water 2019, 11, 1500. [Google Scholar] [CrossRef] [Green Version]
- Soldevila, A.; Blesa, J.; Jensen, T.N.; Tornil-Sin, S.; Fernández-Cantí, R.M.; Puig, V. Leak Localization Method for Water-Distribution Networks Using a Data-Driven Model and Dempster–Shafer Reasoning. IEEE Trans. Control Syst. Technol. 2021, 29, 937–948. [Google Scholar] [CrossRef]
- Deo, N. Graph Theory with Applications to Engineering and Computer Science, 1st ed.; Dover Books on Mathematics: Mineola, NY, USA, 2016; ISBN 13 978-0486807935. [Google Scholar]
- Pérez, R.; Sanz, G. Modelling and simulation of drinking-water networks. In Real-time Monitoring and Operational Control of Drinking-Water Systems; Springer: Berlin/Heidelberg, Germany, 2017; pp. 37–52. [Google Scholar]
- Jensen, T.N.; Kallesøe, C.S. Application of a novel leakage detection framework for municipal water supply on aau water supply lab. In Proceedings of the IEEE 2016 3rd Conference on Control and Fault-Tolerant Systems (SysTol), Barcelona, Spain, 7–9 September 2016; pp. 428–433. [Google Scholar]
- Jense, T.N.; Kallesøe, C.S.; Bendtse, J.D.; Wisniewsk, R. Plug-and-play Commissionable Models for Water Networks with Multiple Inlets. In Proceedings of the IEEE 2018 European Control Conference (ECC), Limassol, Cyprus, 12–15 June 2018; pp. 1–6. [Google Scholar]
- Simpkins, A. System identification: Theory for the user, (ljung, l.; 1999)[on the shelf]. IEEE Robot. Autom. Mag. 2012, 19, 95–96. [Google Scholar] [CrossRef]
- Bort, C.G.; Righetti, M.; Bertola, P. Methodology for leakage isolation using pressure sensitivity and correlation analysis in water distribution systems. Procedia Eng. 2014, 89, 1561–1568. [Google Scholar] [CrossRef] [Green Version]
- Soldevila, A.; Fernandez-Canti, R.M.; Blesa, J.; Tornil-Sin, S.; Puig, V. Leak localization in water distribution networks using Bayesian classifiers. J. Process Control 2017, 55, 1–9. [Google Scholar] [CrossRef] [Green Version]
- Romano, M.; Woodward, K.; Kapelan, Z. Statistical Process Control Based System for Approximate Location of Pipe Bursts and Leaks in Water Distribution Systems. Procedia Eng. 2017, 186, 236–243. [Google Scholar] [CrossRef]
- Blesa, J.; Jiménez, P.; Rotondo, D.; Nejjari, F.; Puig, V. An Interval NLPV Parity Equations Approach for Fault Detection and Isolation of a Wind Farm. IEEE Trans. Ind. Electron. 2015, 62, 3794–3805. [Google Scholar] [CrossRef] [Green Version]
- Rossman, L.A. EPANET 2 User’s Manual; U.S. EPA: Cincinnati, OH, USA, 2000.
- Blesa, J.; Pérez, R. Modelling uncertainty for leak localization in Water Networks. IFAC-PapersOnLine 2018, 51, 730–735. [Google Scholar] [CrossRef]
- Soldevila, A.; Blesa, J.; Tornil-Sin, S.; Fernandez-Canti, R.M.; Puig, V. Sensor placement for classifier-based leak localization in water distribution networks using hybrid feature selection. Comput. Chem. Eng. 2018, 108, 152–162. [Google Scholar] [CrossRef] [Green Version]
- Wang, Q.; Guidolin, M.; Savic, D.; Kapelan, Z. Two-objective design of benchmark problems of a water distribution system via MOEAs: Towards the best-known approximation of the true Pareto front. J. Water Resour. Plan. Manag. 2015, 141, 04014060. [Google Scholar] [CrossRef] [Green Version]
- Bragalli, C.; D’Ambrosio, C.; Lee, J.; Lodi, A.; Toth, P. Water Network Design by MINLP; Rep. No. RC24495; IBM Research: Yorktown Heights, NY, USA, 2008. [Google Scholar]
- Quiñones-Grueiro, M.; Verde, C.; Llanes-Santiago, O. Multi-objective sensor placement for leakage detection and localization in water distribution networks. In Proceedings of the IEEE 2019 4th Conference on Control and Fault Tolerant Systems (SysTol), Casablanca, Morocco, 18–20 September 2019; pp. 129–134. [Google Scholar]
- Ares-Milián, M.J.; Quiñones-Grueiro, M.; Verde, C.; Llanes-Santiago, O. A Leak Zone Location Approach in Water Distribution Networks Combining Data-Driven and Model-Based Methods. Water 2021, 13, 2924. [Google Scholar] [CrossRef]
- Quiñones-Grueiro, M.; Milián, M.A.; Rivero, M.S.; Neto, A.J.S.; Llanes-Santiago, O. Robust leak localization in water distribution networks using computational intelligence. Neurocomputing 2021, 438, 195–208. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| ⋯ | ⋯ | ||||
|---|---|---|---|---|---|
| ⋯ | ⋯ | ||||
| ⋮ | ⋮ | ⋮ | ⋮ | ⋮ | ⋮ |
| ⋯ | ⋯ | ||||
| ⋮ | ⋮ | ⋮ | ⋮ | ⋮ | ⋮ |
| ⋯ | ⋯ |
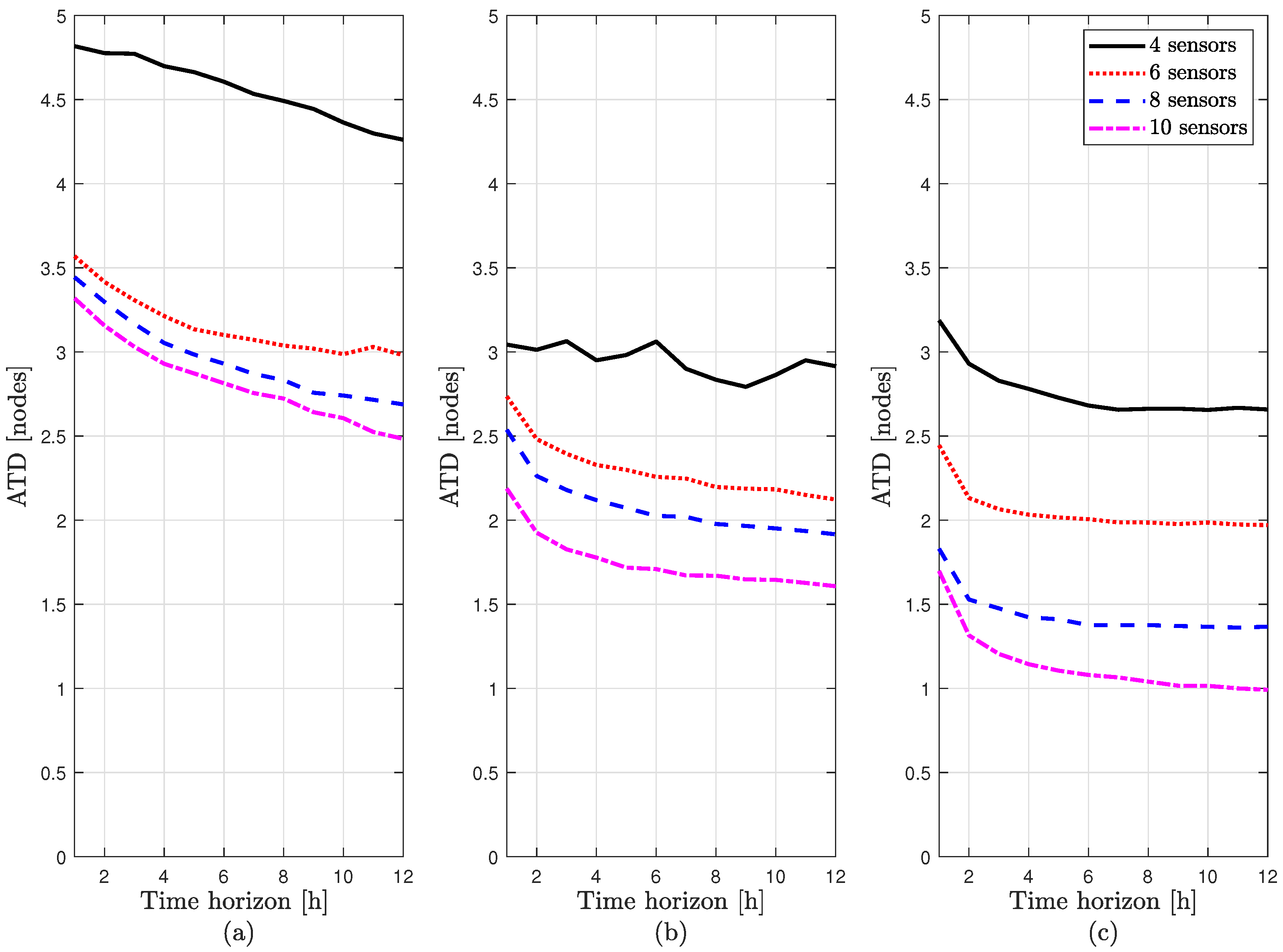
| Case | Nodes with Sensors |
|---|---|
| 1 | 12, 17, 23, 29 |
| 2 | 6, 12, 17, 23, 29, 21 |
| 3 | 6, 12, 15, 17, 23, 21, 27, 30 |
| 4 | 6, 9, 12, 15, 17, 24, 21, 22, 28, 29, 31 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Alves, D.; Blesa, J.; Duviella, E.; Rajaoarisoa, L. Robust Data-Driven Leak Localization in Water Distribution Networks Using Pressure Measurements and Topological Information. Sensors 2021, 21, 7551. https://doi.org/10.3390/s21227551
Alves D, Blesa J, Duviella E, Rajaoarisoa L. Robust Data-Driven Leak Localization in Water Distribution Networks Using Pressure Measurements and Topological Information. Sensors. 2021; 21(22):7551. https://doi.org/10.3390/s21227551
Chicago/Turabian StyleAlves, Débora, Joaquim Blesa, Eric Duviella, and Lala Rajaoarisoa. 2021. "Robust Data-Driven Leak Localization in Water Distribution Networks Using Pressure Measurements and Topological Information" Sensors 21, no. 22: 7551. https://doi.org/10.3390/s21227551
APA StyleAlves, D., Blesa, J., Duviella, E., & Rajaoarisoa, L. (2021). Robust Data-Driven Leak Localization in Water Distribution Networks Using Pressure Measurements and Topological Information. Sensors, 21(22), 7551. https://doi.org/10.3390/s21227551