
Robust Position Control of an Over-actuated Underwater Vehicle under Model Uncertainties and Ocean Current Effects Using Dynamic Sliding Mode Surface and Optimal Allocation Control

 ,
,  ,
,  ,
,  ,
,  ,
, 
Abstract
:1. Introduction
2. Mathematical Model of an over-Actuated AUV under the Ocean Current Effects
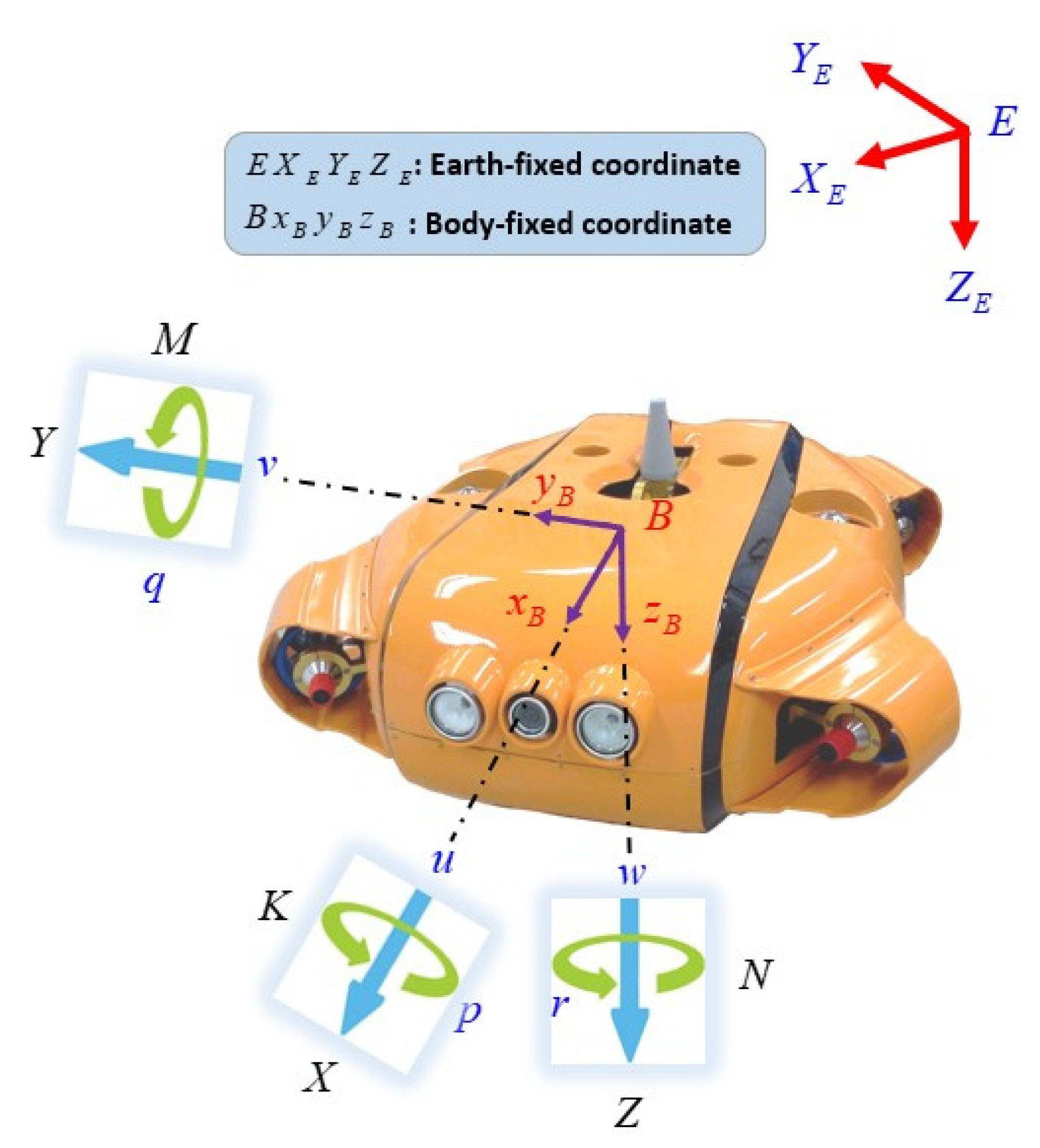
2.1. Coordinate System
- The body-fixed (BF) frame is attached to the center of gravity of the AUV: B-XYZ;
- The Earth-fixed (EF) frame system which can be taken as linked to the Earth in the case of the AUV moving at slow speed:.
2.2. Kinematic Equations
2.3. Kinetic Equations
2.3.1. Inertial Matrix
2.3.2. Coriolis and Centripetal Matrix
2.3.3. Damping Matrix
2.3.4. Restoring Forces and Moments
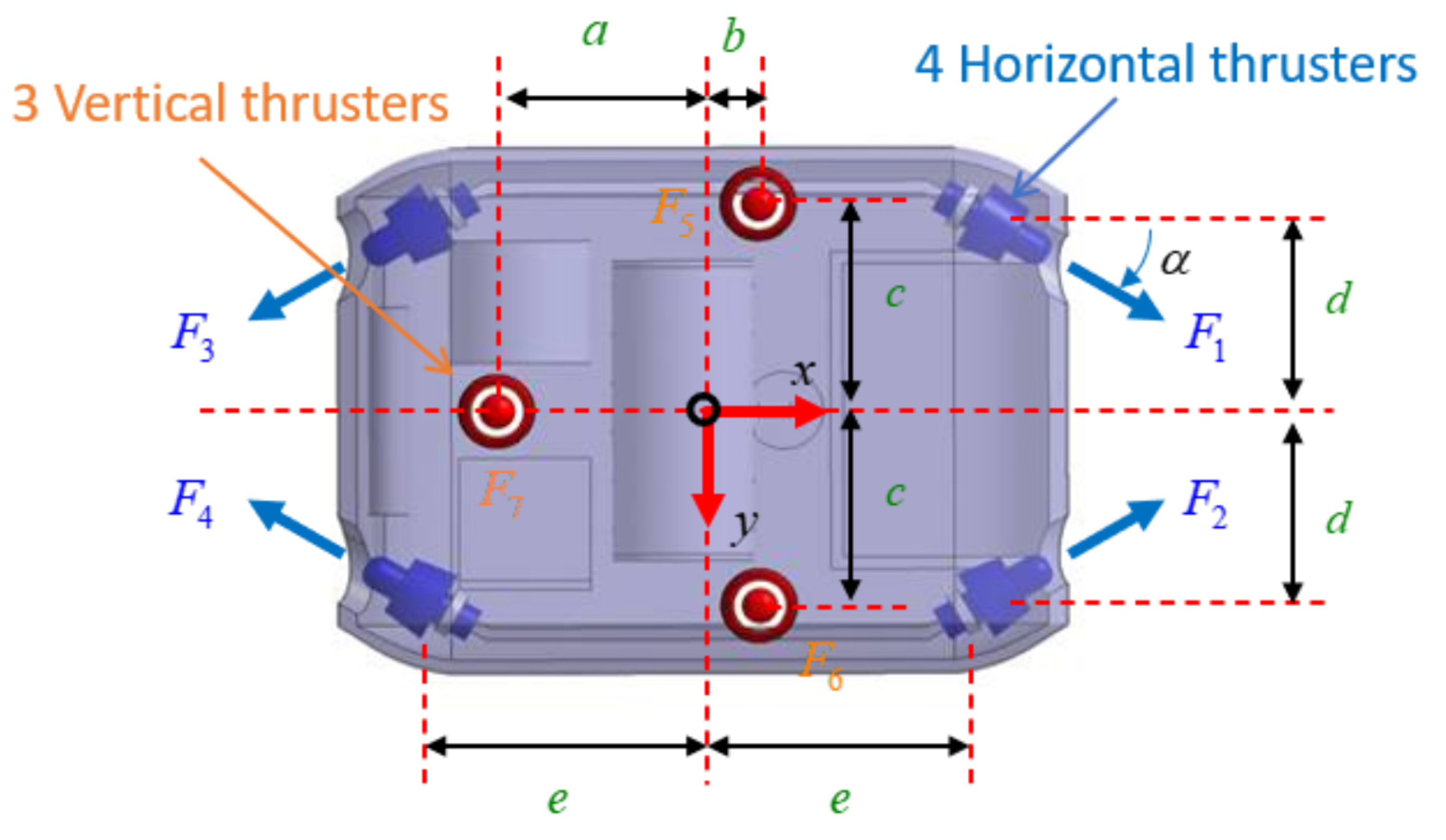
2.4. Thruster Configuration Matrix
2.5. Dynamic Model of the Over-actuated AUV Including Ocean Current Effects
- As the AUV is a submerged object, the wave-induced currents are quite negligible;
- The ocean current is slowly varying or constant, and its speed is bounded in the specified range;
- The equations of the motions can be expressed in terms of the relative velocity between the AUV and the ocean currents.
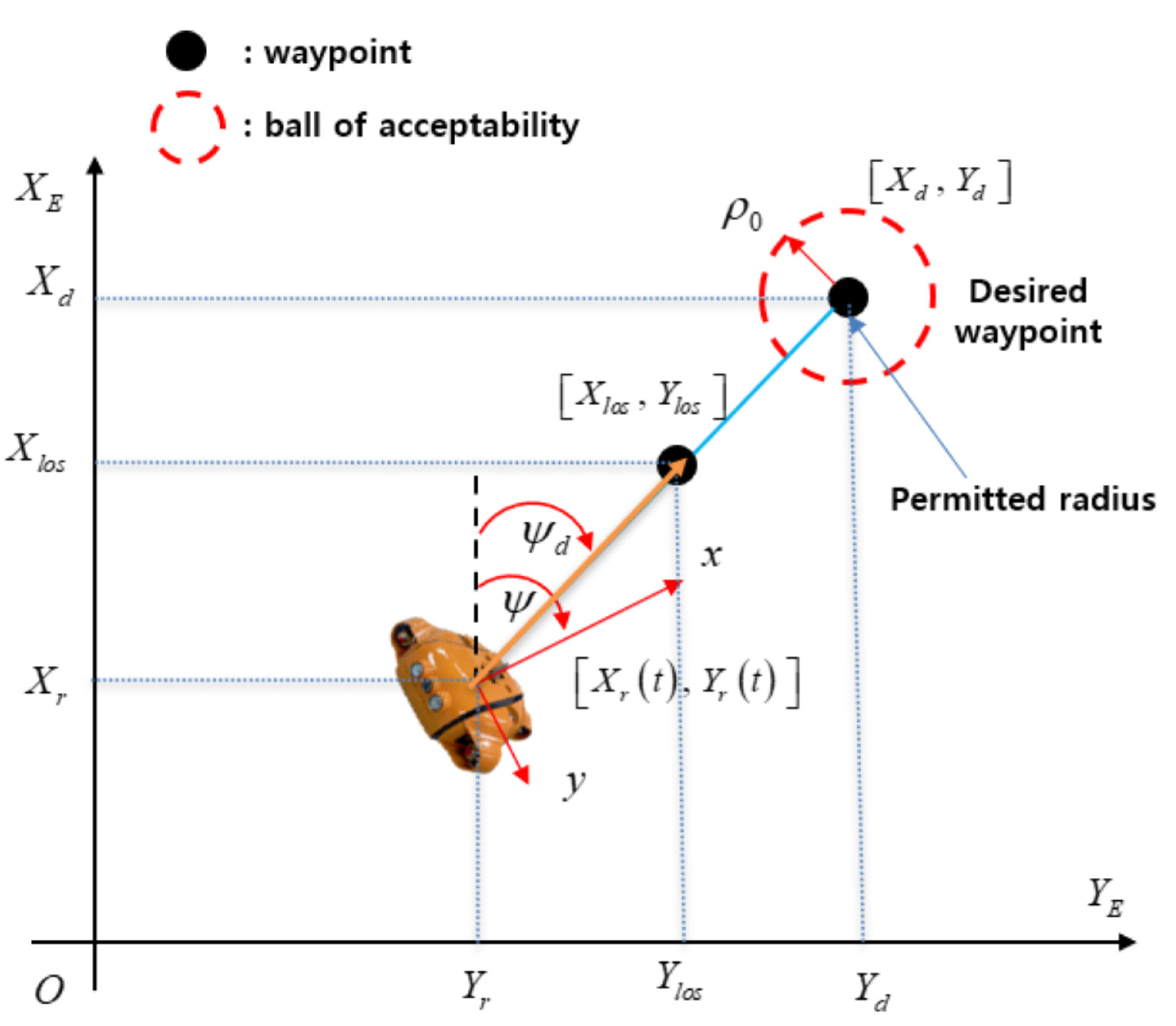
3. Design the Heading Angle of the over-Actuated AUV Using Line of Sight Guidance
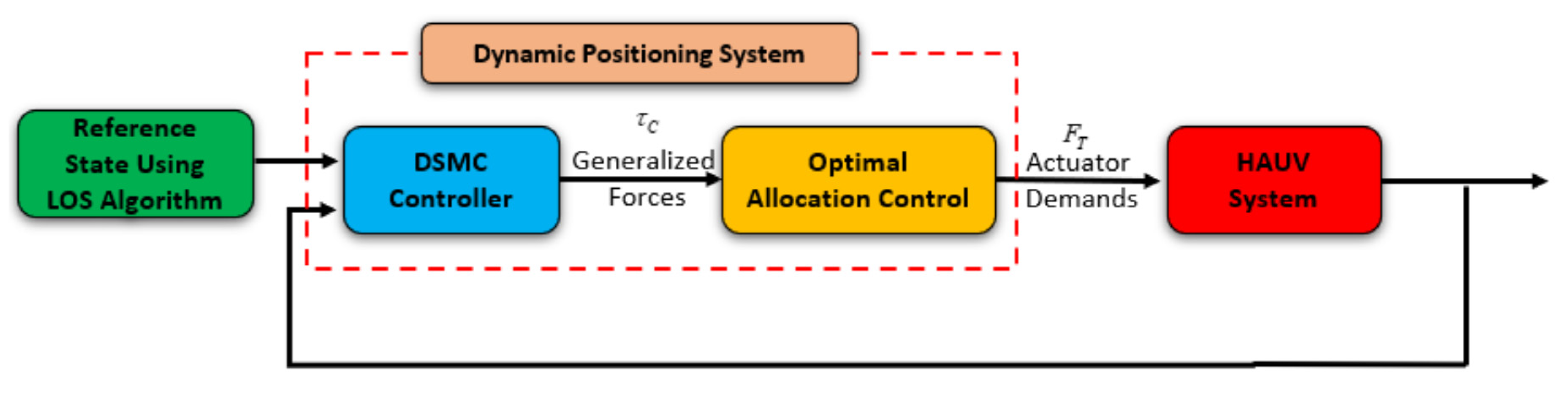
4. Design of Dynamic Position Control for the Over-Actuated AUV
4.1. Design of Motion Control for the over-Actuated AUV Using Dynamic Sliding Mode Controller
4.2. Design of Motion Control for the Over-actuated AUV Using Dynamic Sliding Mode Controller
4.2.1. Unconstrained Thrust Allocation Using Lagrange Multipliers
4.2.2. Constrained Thruster Allocation Using Quadratic Programming
5. Simulation Results and Discussion
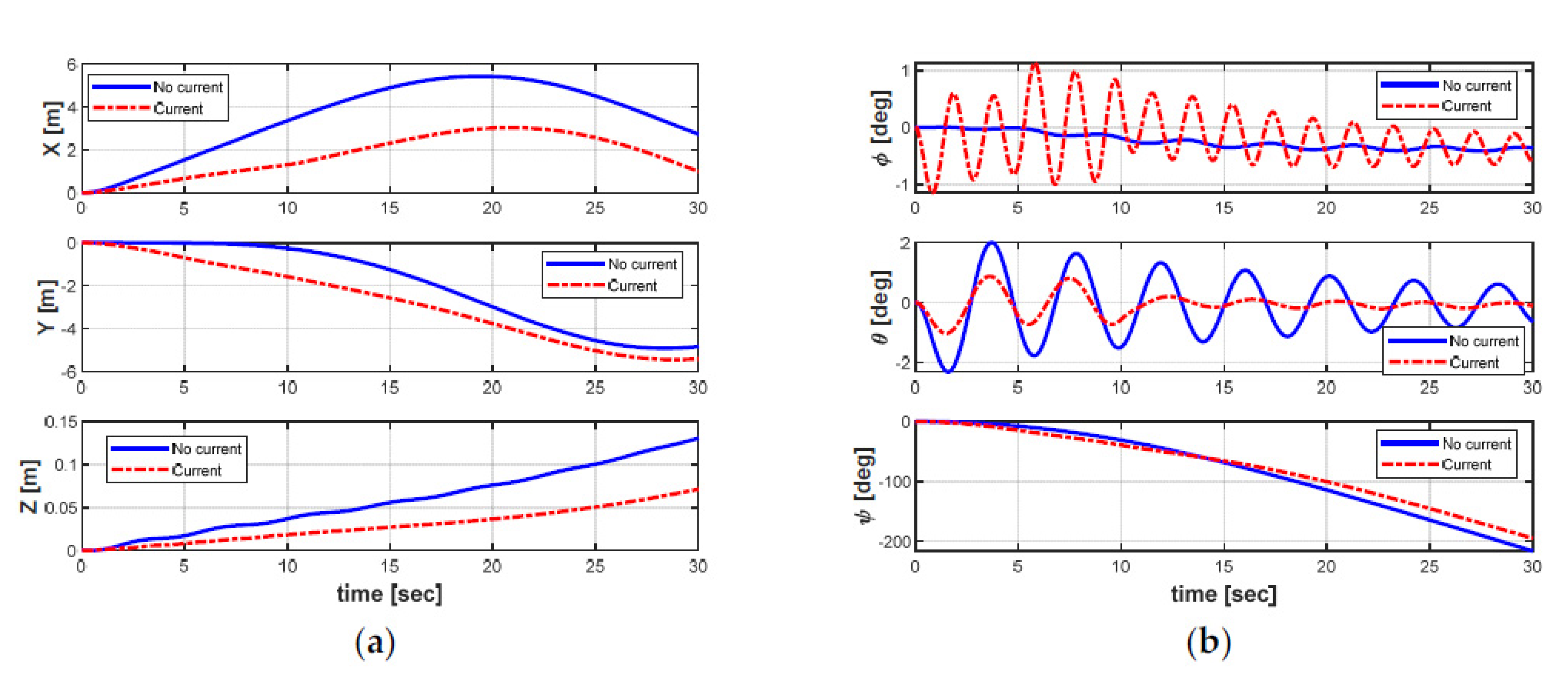
- Simulation 1: The effects of the ocean currents on the AUV motions;
- Simulation 2: The position stabilization control of the AUV in six-DOFs in the presence of the ocean currents and the model uncertainties.
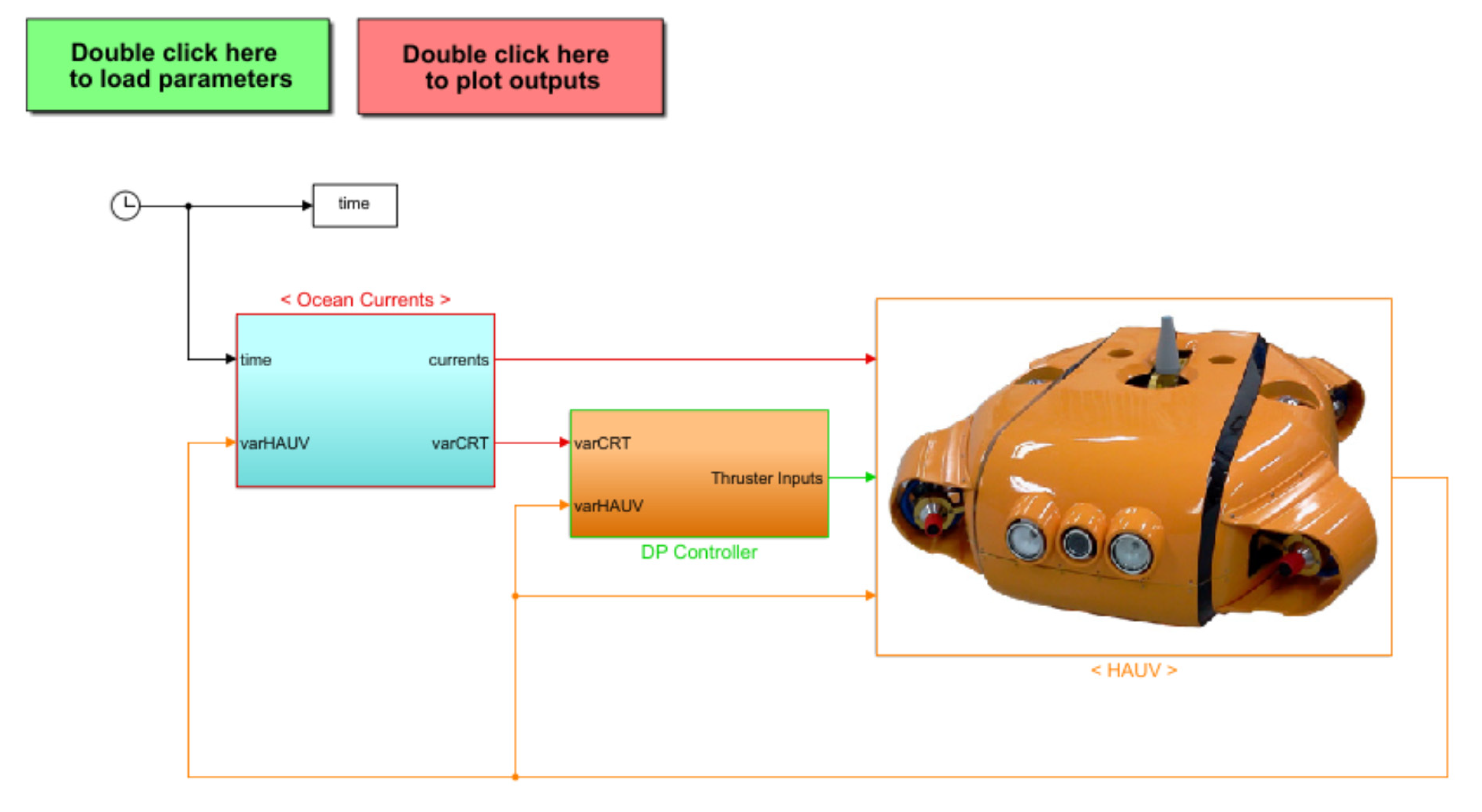
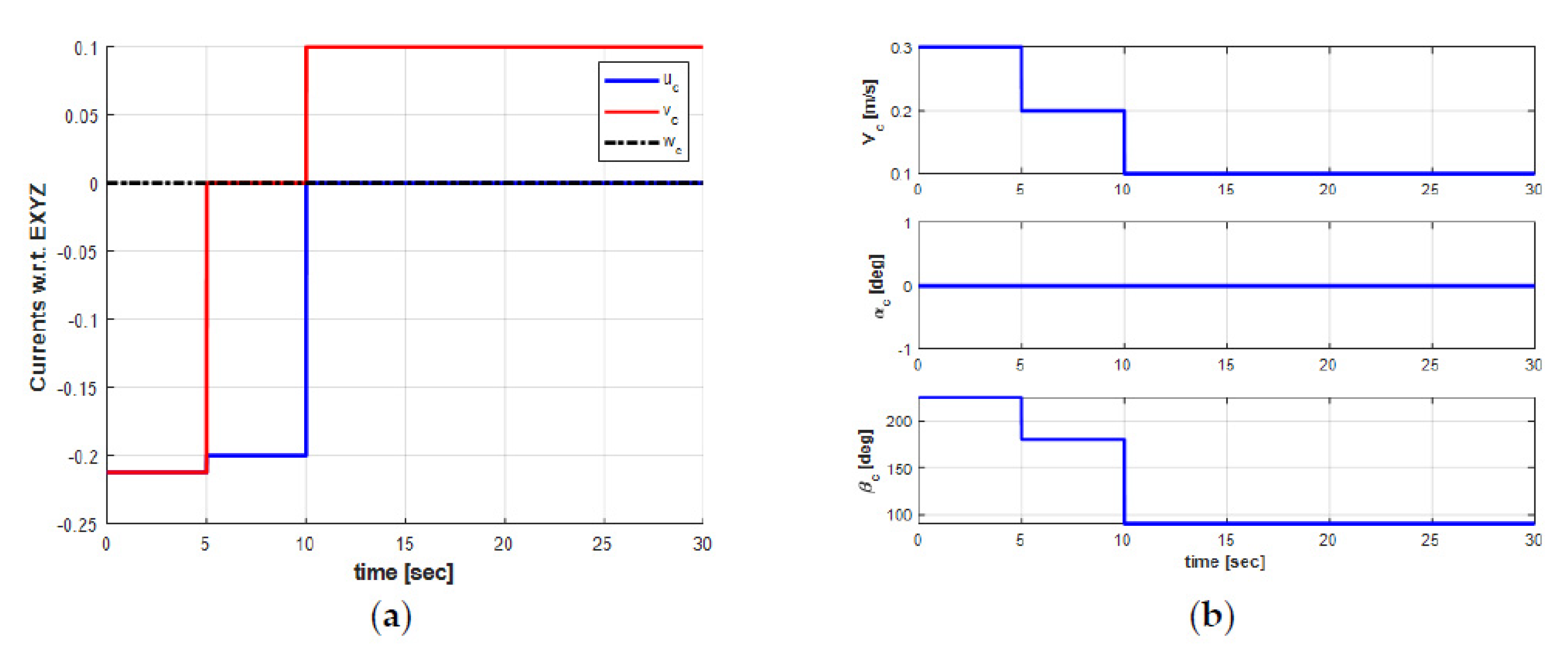
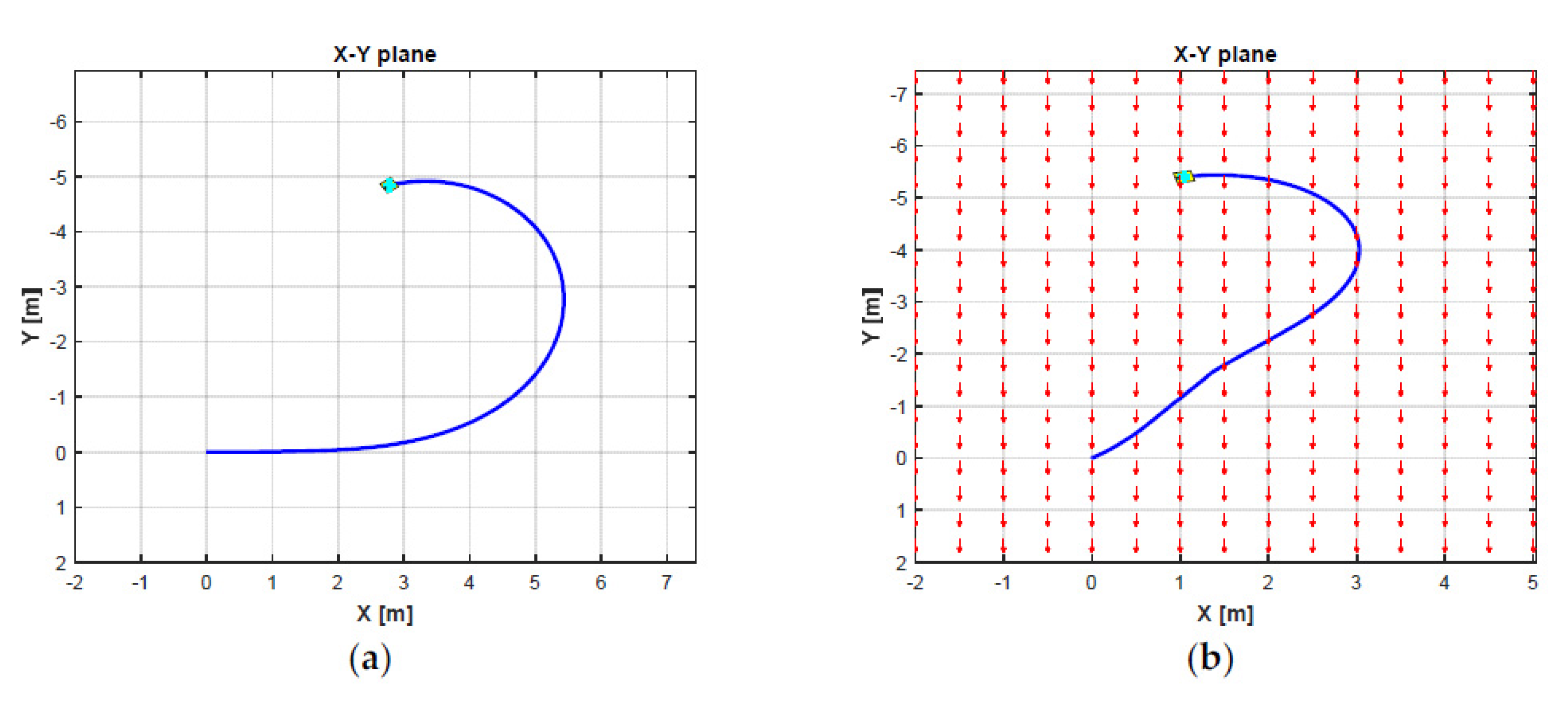
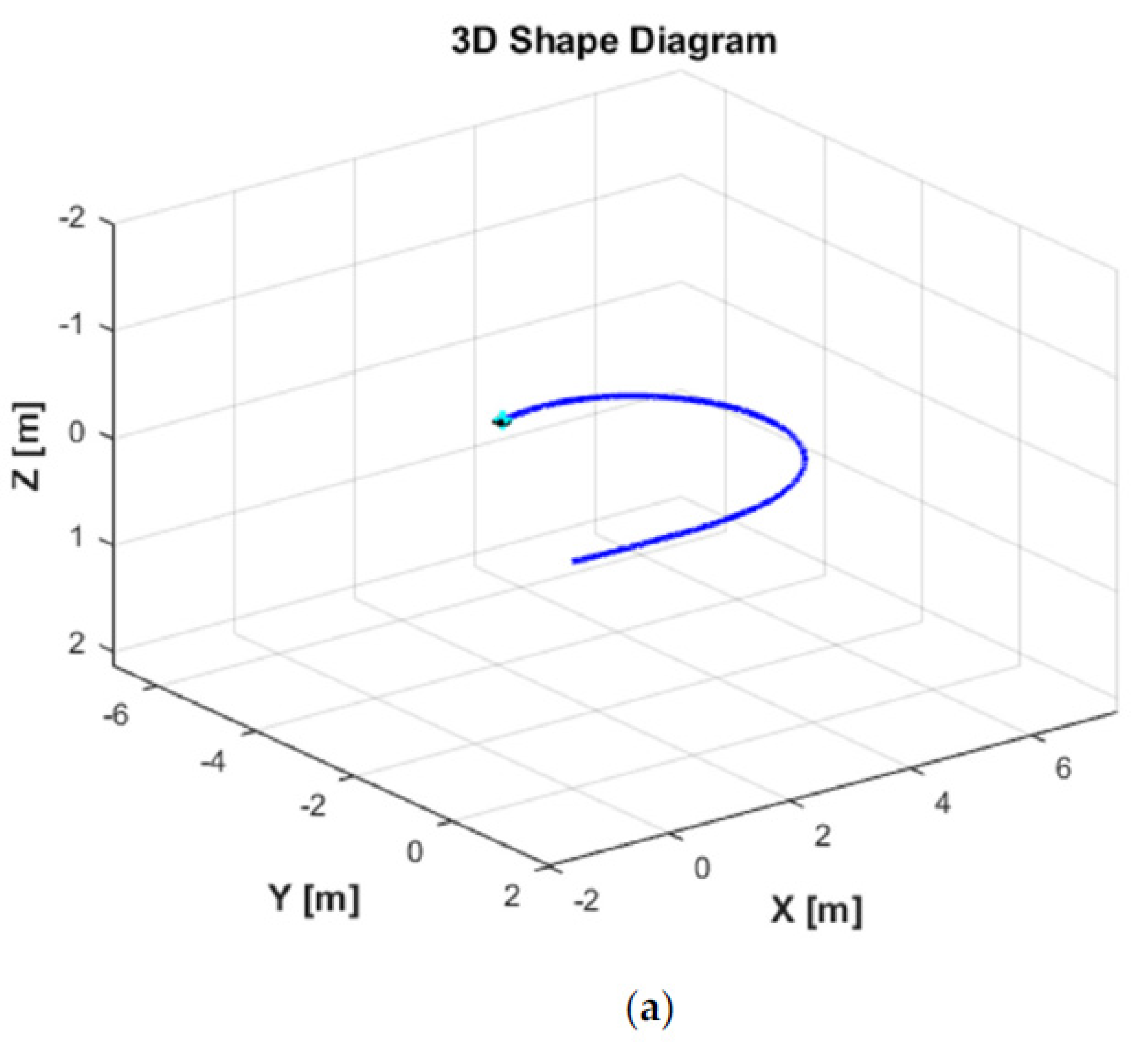
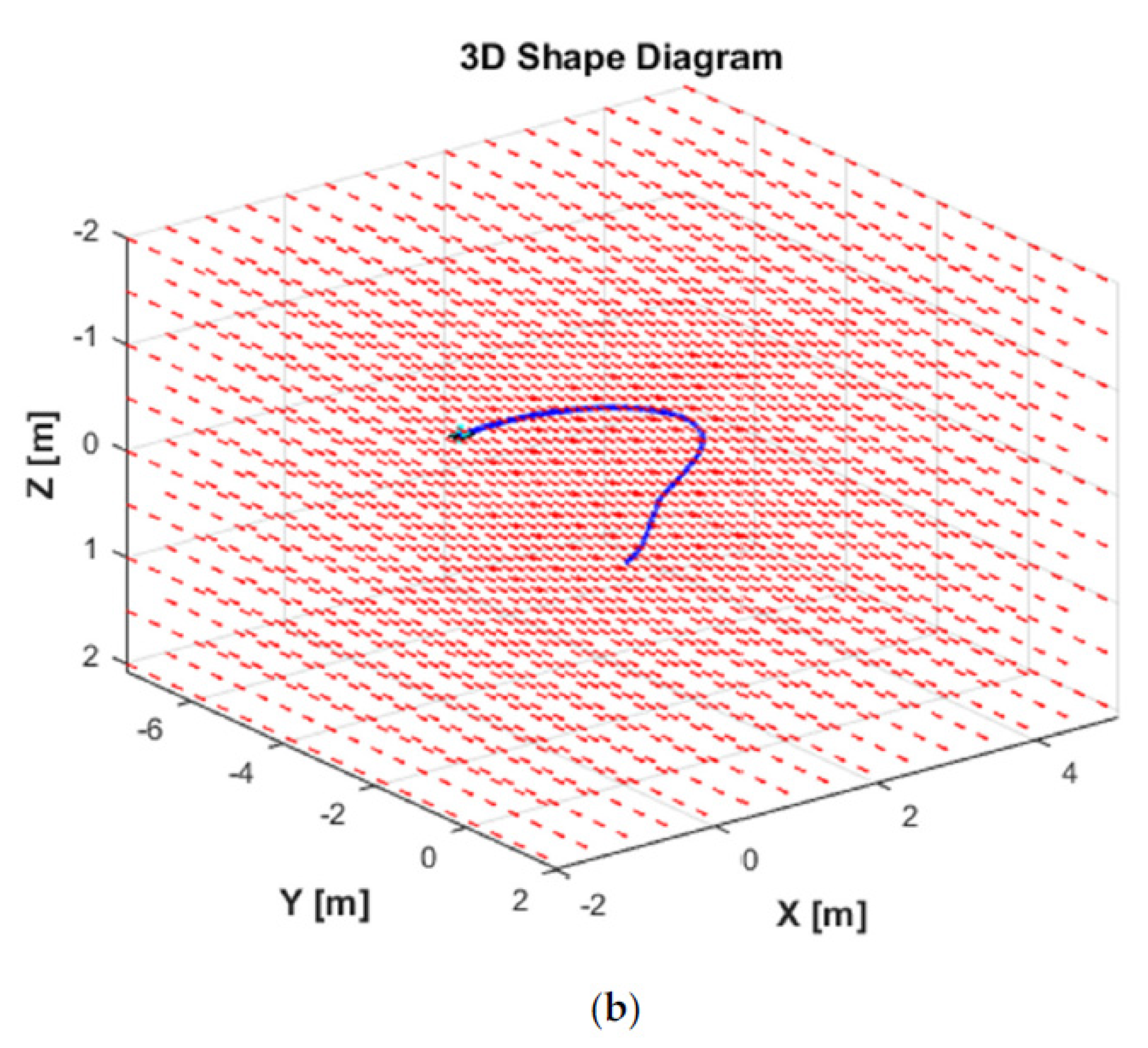
5.1. Simulate the Effects of Ocean Currents on the over-Actuated AUV
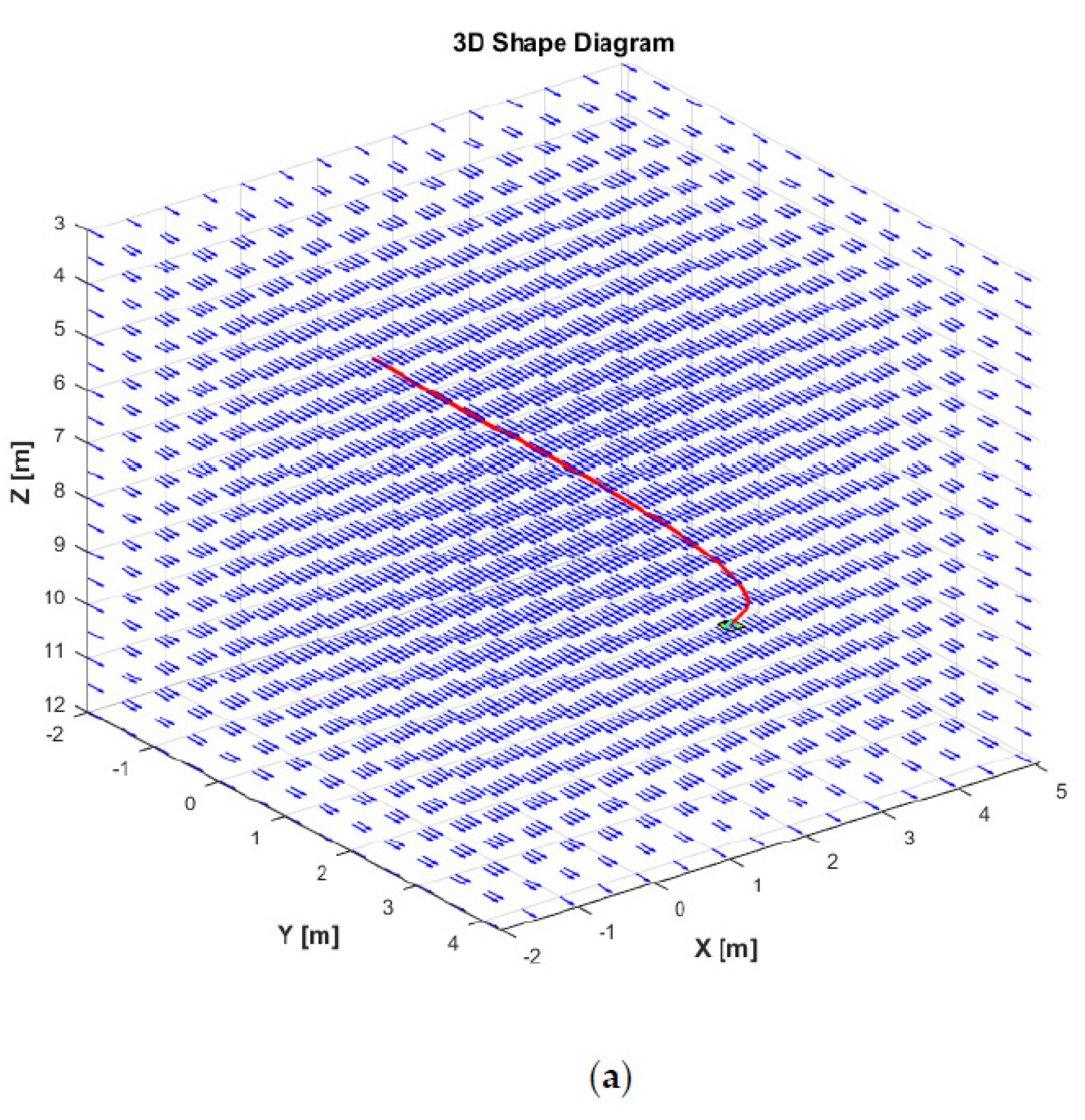
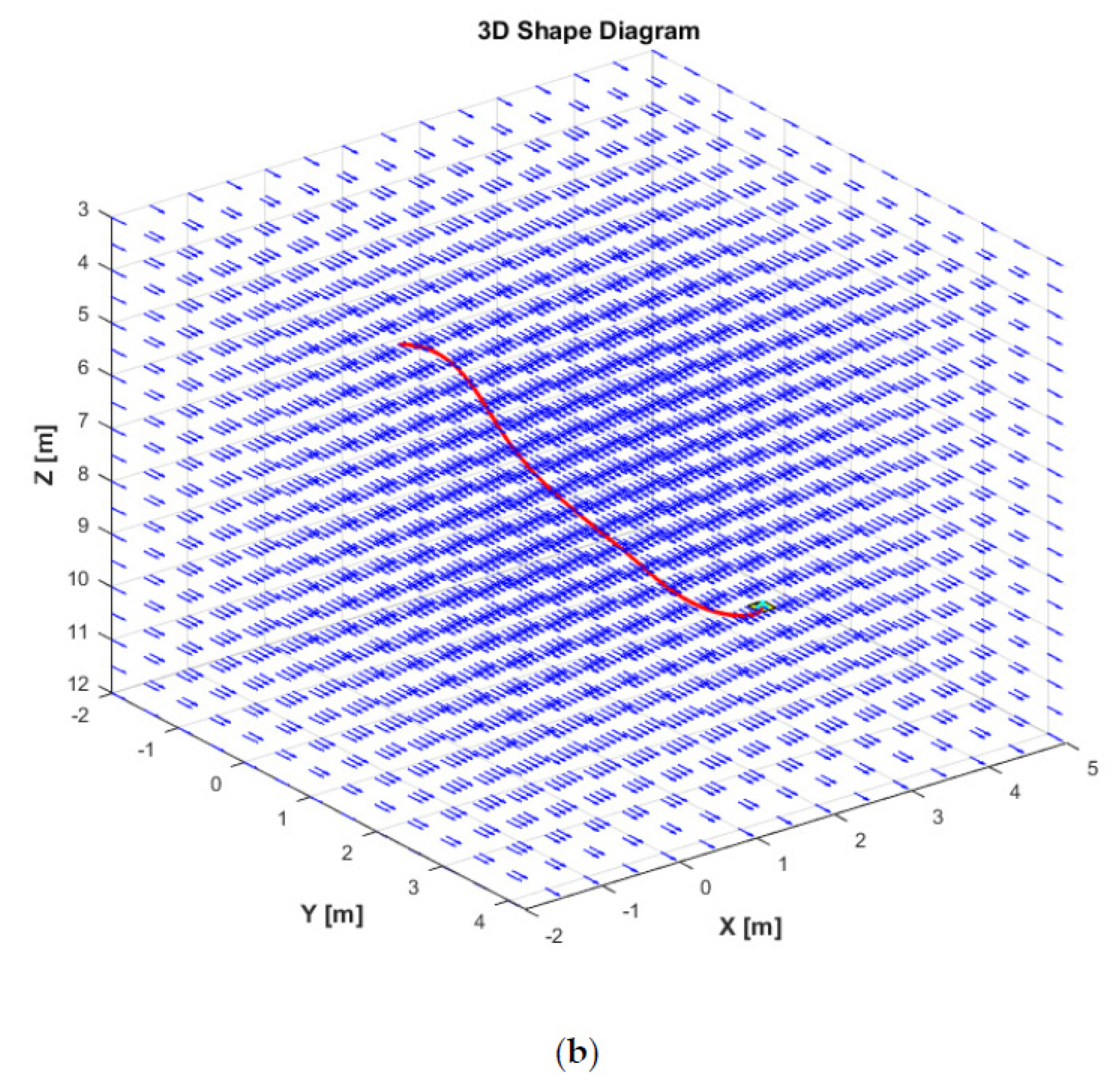
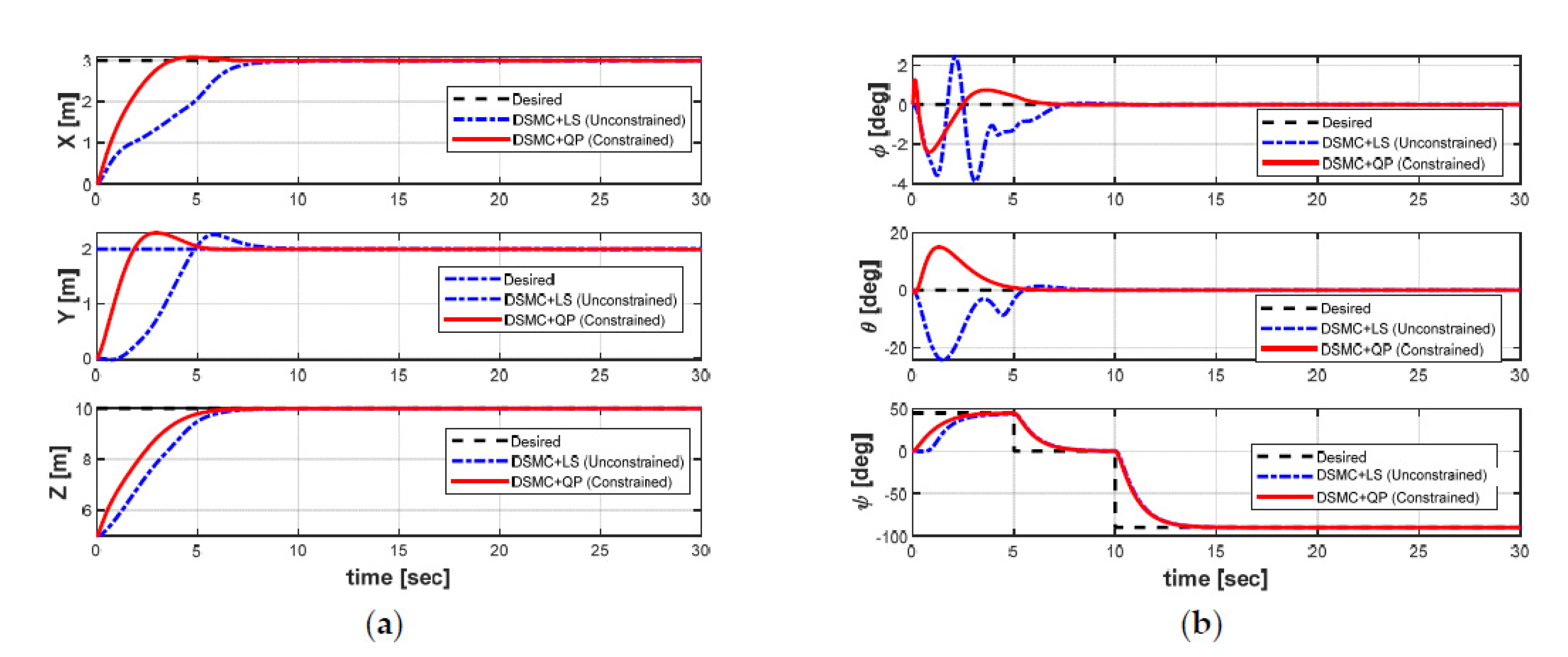
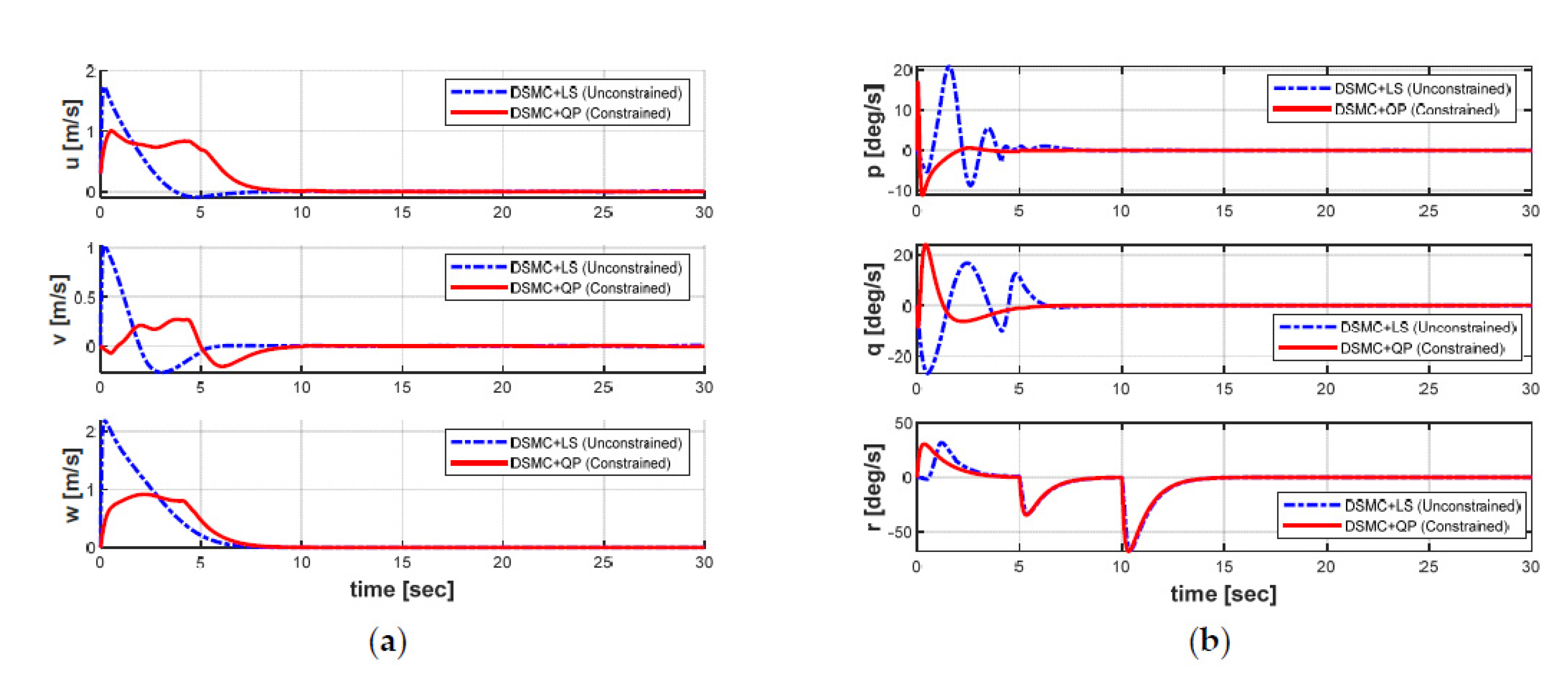
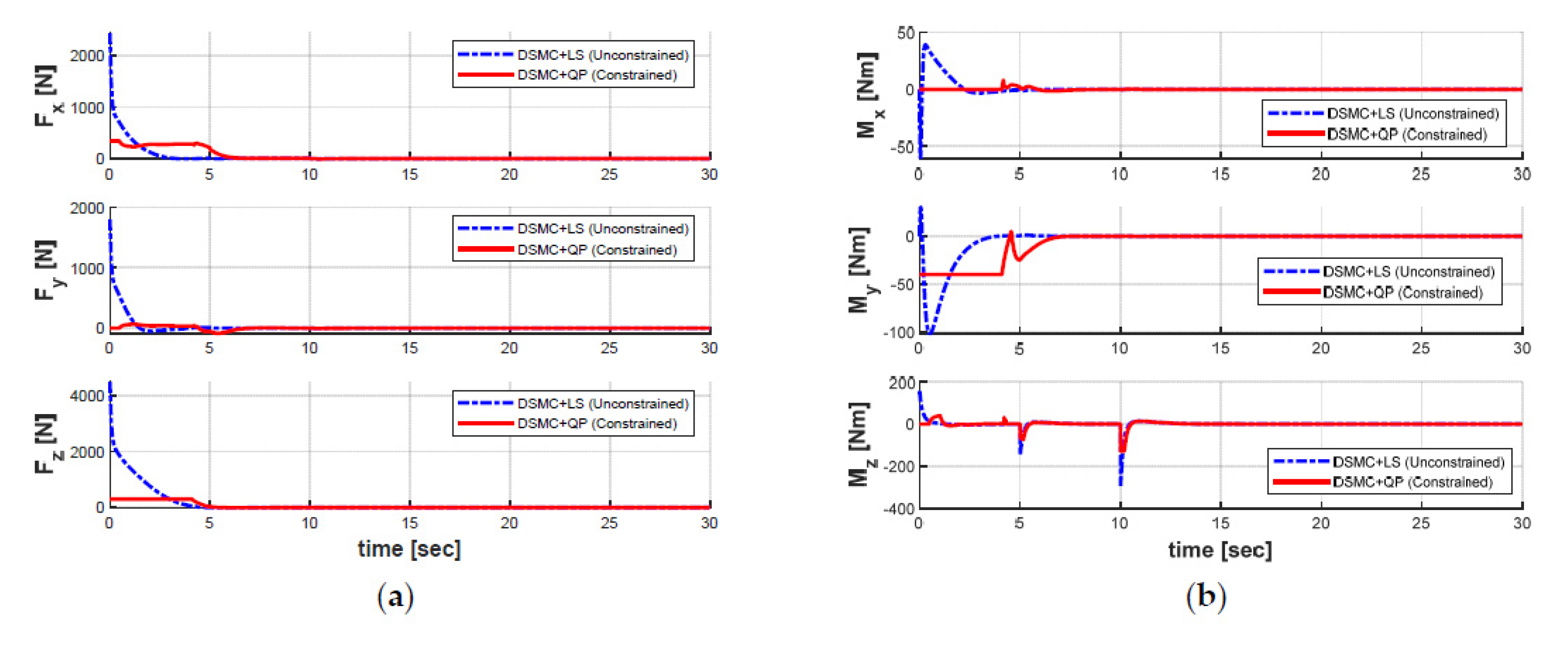
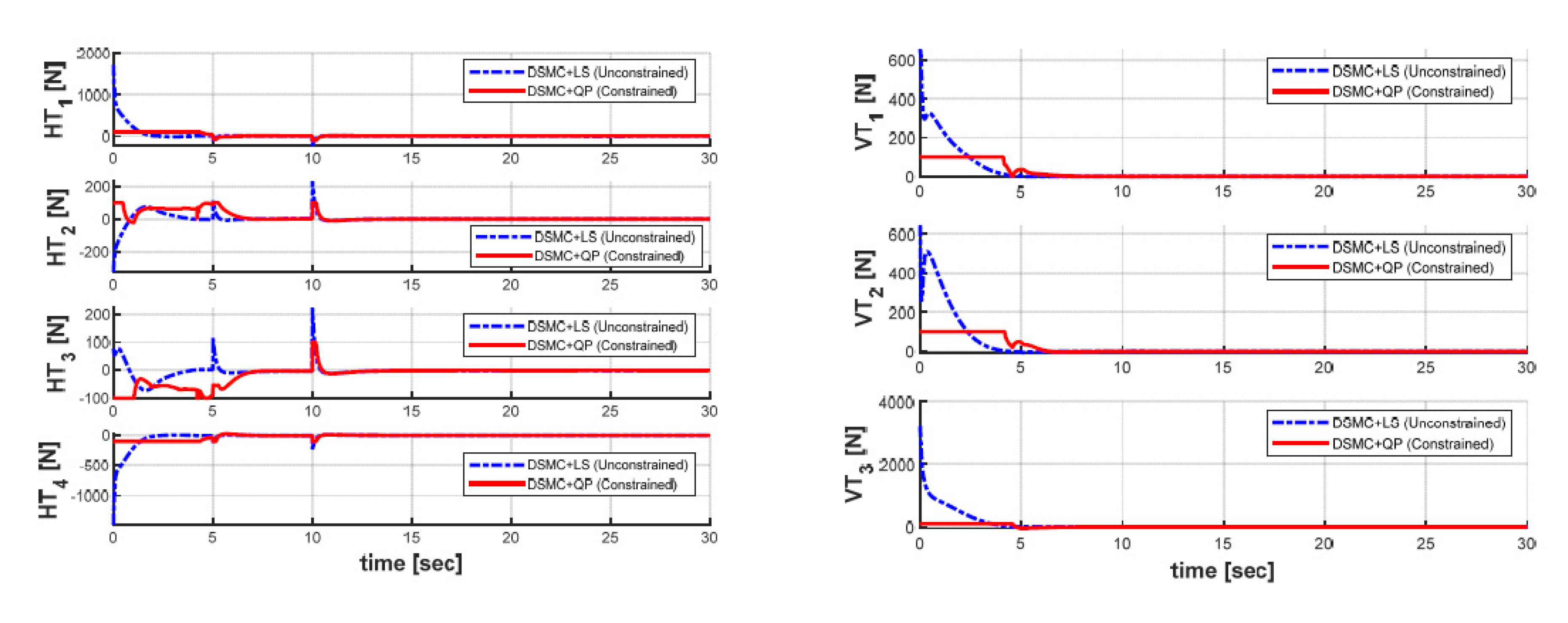
5.2. Dynamic Position of the over-Actuated AUV in Six-DOF
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Vu, M.T.; Choi, H.S.; Kim, J.Y.; Tran, N.H. A study on an underwater tracked vehicle with a ladder trencher. Ocean Eng. 2016, 127, 90–102. [Google Scholar] [CrossRef]
- Vu, M.T.; Choi, H.S.; Kang, J.I.; Ji, D.H.; Jeong, S.K. A study on hovering motion of the underwater vehicle with umbilical cable. Ocean Eng. 2017, 135, 137–157. [Google Scholar]
- Vu, M.T.; Jeong, S.K.; Choi, H.S.; Oh, J.Y.; Ji, D.H. Study on down-cutting ladder trencher of an underwater construction robot for seabed application. Appl. Ocean Res. 2018, 71, 90–104. [Google Scholar] [CrossRef]
- Qiao, L.; Yi, B.; Wu, D.; Zhang, W. Design of three exponentially convergent robust controllers for the trajectory tracking of autonomous underwater vehicles. Ocean Eng. 2017, 134, 157–172. [Google Scholar] [CrossRef]
- Vu, M.T.; Choi, H.S.; Nguyen, N.D.; Kim, S.K. Analytical design of an underwater construction robot on the slope with an up-cutting mode operation of a cutter bar. Appl. Ocean Res. 2019, 86, 289–309. [Google Scholar] [CrossRef]
- Vu, M.T.; Choi, H.S.; Thieu, Q.M.N.; Nguyen, N.D.; Lee, S.D.; Le, T.H.; Sur, J. Docking assessment algorithm for autonomous underwater vehicles. Appl. Ocean Res. 2020, 100, 102180. [Google Scholar] [CrossRef]
- Cho, H.; Jeong, S.-K.; Ji, D.-H.; Tran, N.-H.; Vu, M.T.; Choi, H.-S. Study on Control System of Integrated Unmanned Surface Vehicle and Underwater Vehicle. Sensors 2020, 20, 2633. [Google Scholar] [CrossRef]
- Vu, M.T.; Van, M.; Bui, D.H.P.; Do, Q.T.; Huynh, T.T.; Lee, S.D.; Choi, H.S. Study on Dynamic Behavior of Unmanned Surface Vehicle-Linked-Unmanned Underwater Vehicle System for Underwater Exploration. Sensors 2020, 20, 1329. [Google Scholar] [CrossRef] [Green Version]
- Kang, J.I.; Choi, H.S.; Vu, M.T.; Nguyen, N.D.; Ji, D.H.; Kim, J.Y. Experimental study of dynamic stability of underwater vehicle-manipulator system using zero moment point. J. Mar. Sci. Technol. 2017, 25, 767–774. [Google Scholar]
- Deutsch, C.; Kuttenkeuler, J.; Melin, T. Glider performance analysis and intermediate-fidelity modelling of underwater vehicles. Ocean Eng. 2020, 210, 107567. [Google Scholar] [CrossRef]
- Ji, D.H.; Choi, H.S.; Vu, M.T.; Nguyen, N.D.; Kim, S.K. Navigation and Control of Underwater Tracked Vehicle Using Ultrashort Baseline and Ring Laser Gyro Sensors. Sens. Mater. 2019, 31, 1575–1587. [Google Scholar] [CrossRef]
- Fernandez, R.A.S.; Grande, D.; Martins, A.; Bascetta, L.; Dominguez, S.; Rossi, C. Modeling and Control of Underwater Mine Explorer Robot UX-1. IEEE Access 2019, 7, 39432–39447. [Google Scholar] [CrossRef]
- Zhou, C.; Low, K.H. Better Endurance and Load Capacity: An Improved Design of Manta Ray Robot (RoMan-II). J. Bionic Eng. 2010, 7, S137–S144. [Google Scholar] [CrossRef]
- Vu, M.T.; Choi, H.S.; Ji, D.H.; Jeong, S.K.; Kim, J.Y. A study on an up-milling rock crushing tool operation of an underwater tracked vehicle. Proc. Inst. Mech. Eng. M J. Eng. Marit. Environ. 2019, 233, 283–300. [Google Scholar] [CrossRef]
- Fernandez, R.A.S.; Parra, R.E.A.; Milosevic, Z.; Dominguez, S.; Rossi, C. Nonlinear Attitude Control of Spherical Underwater Vehicle. Sensors 2019, 19, 1445. [Google Scholar] [CrossRef] [Green Version]
- Vu, M.T.; Choi, H.S.; Nhat, T.Q.M.; Ji, D.H.; Son, H.J. Study on the dynamic behaviors of an USV with a ROV. In Proceedings of the OCEANS 2017, Anchorage, AK, USA, 18–21 September 2017; pp. 1–7. [Google Scholar]
- Antonelli, G.; Fossen, T.I.; Yoerger, D.R. Underwater Robotics; Springer: Berlin/Heidelberg, Germany, 2008; pp. 987–1008. [Google Scholar]
- Jung, D.W.; Hong, S.M.; Lee, J.H.; Cho, H.J.; Choi, H.S.; Vu, M.T. A Study on Unmanned Surface Vehicle Combined with Remotely Operated Vehicle System. Proc. Eng. Technol. Innov. 2019, 9, 17–24. [Google Scholar]
- Farrell, J.A.; Pang, S.; Li, W.; Arrieta, R.M. Biologically inspired chemical plume tracing demonstrated on an autonomous underwater vehicle. In Proceedings of the 2004 IEEE International Conference on Systems, Man and Cybernetics, Hague, The Netherlands, 10–13 October 2004. [Google Scholar]
- Yildiz, Ö.; Gökalp, R.B.; Yilmaz, A.E. A review on motion control of the underwater vehicles. In Proceedings of the 2009 International Conference on Electrical and Electronics Engineering-ELECO 2009, Bursa, Turkey, 5–8 November 2009. [Google Scholar]
- Jun, S.W.; Lee, H.J. Design of TS fuzzy-model-based controller for depth control of autonomous underwater vehicles with parametric uncertainties. In Proceedings of the 2011 11th International Conference on Control, Automation and Systems, Gyeonggi-do, Korea, 26–29 October 2011. [Google Scholar]
- Dahmani, H.; Chadli, M.; Rabhi, A.; El Hajjaji, A. Road curvature estimation for vehicle lane departure detection using a robust Takagi–Sugeno fuzzy observer. Veh. Syst. Dyn. 2013, 51, 581–599. [Google Scholar] [CrossRef]
- Thanh, H.L.N.N.; Vu, M.T.; Mung, N.X.; Nguyen, N.P.; Phuong, N.T. Perturbation Observer-Based Robust Control Using a Multiple Sliding Surfaces for Nonlinear Systems with Influences of Matched and Unmatched Uncertainties. Mathematics 2020, 8, 1371. [Google Scholar] [CrossRef]
- Vu, M.T.; Choi, H.S.; Kang, J.I.; Ji, D.H.; Joong, H. Energy efficient trajectory design for the underwater vehicle with bounded inputs using the global optimal sliding mode control. J. Mar. Sci. Technol. 2017, 25, 705–714. [Google Scholar]
- Medagoda, L.; Williams, S.B. Model predictive control of an autonomous underwater vehicle in an in situ estimated water current profile. In Proceedings of the 2012 Oceans-Yeosu, Yeosu, Korea, 21–24 May 2012. [Google Scholar]
- Vu, M.T.; Thanh, H.L.N.N.; Huynh, T.T.; Do, Q.T.; Do, T.D.; Hoang, Q.D.; Le, T.H. Station-Keeping Control of a Hovering Over-Actuated Autonomous Underwater Vehicle Under Ocean Current Effects and Model Uncertainties in Horizontal Plane. IEEE Access 2021, 9, 6855–6867. [Google Scholar] [CrossRef]
- Kumar, N.; Panwar, V.; Sukavanam, N.; Sharma, S.P.; Borm, J.-H. Neural network-based nonlinear tracking control of kinematically redundant robot manipulators. Math. Comput. Model. 2011, 53, 1889–1901. [Google Scholar] [CrossRef]
- Martin, P.; Katebi, R. Multivariable PID tuning of dynamic ship positioning control systems. J. Mar. Eng. Technol. 2005, 4, 11–24. [Google Scholar] [CrossRef]
- Lin, X.; Nie, J.; Jiao, Y.; Liang, K.; Li, H. Nonlinear adaptive fuzzy output-feedback controller design for dynamic positioning system of ships. Ocean Eng. 2018, 158, 186–195. [Google Scholar] [CrossRef]
- Tannuri, E.A.; Agostinho, A.C.; Morishita, H.M.; Moratell, L.J. Dynamic positioning systems: An experimental analysis of sliding mode control. Control Eng. Pract. 2010, 18, 1121–1132. [Google Scholar] [CrossRef]
- Hu, X.; Du, J.L.; Shi, J.W. Adaptive fuzzy controller design for dynamic positioning system of vessels. Appl. Ocean Res. 2015, 53, 46–53. [Google Scholar] [CrossRef]
- Du, J.L.; Yang, Y.; Wang, D.; Guo, C. A robust adaptive neural networks controller for maritime dynamic positioning system. Neurocomputing 2013, 110, 128–136. [Google Scholar] [CrossRef]
- Subcommittee, S.H. Nomenclature for Treating the Motion of a Submerged Body through a Fluid. In Proceedings of the American Towing Tank Conference, New York, NY, USA, 11–14 September 1950. [Google Scholar]
- Fossen, T.I. Guidance and Control of Ocean Vehicles; John Wiley & Sons: New York, NY, USA, 1994. [Google Scholar]
- Fossen, T.I. Handbook of Marine Craft Hydrodynamics and Motion Control; John Wiley & Sons: Hoboken, NJ, USA, 2011. [Google Scholar]
- Healey, A.J.; Lienard, D. Multivariable Sliding Mode Control for Autonomous Diving and Steering of Unmanned Underwater Vehicles. IEEE J. Ocean. Eng. 1993, 18, 327–339. [Google Scholar] [CrossRef] [Green Version]
- Xu, H.; Zhang, G.C.; Sun, Y.S.; Pang, S.; Ran, X.R.; Wang, X.B. Design and Experiment of a Plateau Data-Gathering AUV. J. Mar. Sci. Eng. 2019, 7, 376. [Google Scholar] [CrossRef] [Green Version]
- Soresen, J.A. A survey of dynamic positioning control systems. Annu. Rev. Control. 2011, 35, 123–136. [Google Scholar] [CrossRef]
- Fossen, T.I.; Strand, J.P. Passive nonlinear observer design for ships using Lyapunov methods: Full-scale experiments with a supply vessel. Automatica 1999, 35, 3–16. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Units | Value | Description |
|---|---|---|---|
| kg | −29 | Added mass | |
| kg/s | −72 | Linear damping | |
| kg/m | −227.18 | Axial drag | |
| kg | −30 | Added mass | |
| kg.m | 1.93 | Added mass | |
| kg/s | −77 | Linear damping | |
| kg/m | −405.41 | Crossflow drag | |
| kg | −90 | Added mass | |
| kg.m | −1.93 | Added mass | |
| kg/s | −95 | Linear damping | |
| kg/m | −478.03 | Crossflow drag | |
| kg.m | −5.2 | Added mass | |
| kg.m/s | −40 | Linear damping | |
| kg.m | −3.212 | Rolling drag | |
| kg | −1.93 | Added mass | |
| kg.m | −7.2 | Added mass | |
| kg.m/s | −30 | Linear damping | |
| kg.m | −14.002 | Crossflow drag | |
| kg | 1.93 | Added mass | |
| kg.m | −3.3 | Added mass | |
| kg.m/s | −30 | Linear damping | |
| kg.m | −12.937 | Crossflow drag |
| Properties | Units | Symbols | Values |
|---|---|---|---|
| AUV Parameters | |||
| Dimension of the AUV | mm | 560 × 750 × 280 | |
| Weight of the AUV | kg | 80 | |
| Center of gravity | m | (0,0,−0.06) | |
| Center of buoyancy | m | (0,0,0) | |
| Inertia tensor in the x-axis | kg.m2 | 6.9 | |
| Inertia tensor in the y-axis | kg.m2 | 26.1 | |
| Inertia tensor in the z-axis | kg.m2 | 23.2 | |
| Initial Values and Desired Trajectory | |||
| Initial position of the AUV | m/degree | [0;0;0;0;0;0] | |
| Initial velocity of the AUV | m/degree | [0.3;0;0;0;0;0] | |
| Desired point of the AUV | m/degree | [3;2;10;0;0;LOS] | |
| Parameter of the DSMC Controller | |||
| Parameter 1: | - | [7;7;7;7;7;9] | |
| Parameter 2: | - | [0.06;0.06;0.06;0.06;0.06;0.06] | |
| Parameter 3: | - | [0.5;0.5;0.5;0.5;0.5;0.5] | |
| Parameter 4: | - | [8;8;8;8;8;10] | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Vu, M.T.; Le, T.-H.; Thanh, H.L.N.N.; Huynh, T.-T.; Van, M.; Hoang, Q.-D.; Do, T.D. Robust Position Control of an Over-actuated Underwater Vehicle under Model Uncertainties and Ocean Current Effects Using Dynamic Sliding Mode Surface and Optimal Allocation Control. Sensors 2021, 21, 747. https://doi.org/10.3390/s21030747
Vu MT, Le T-H, Thanh HLNN, Huynh T-T, Van M, Hoang Q-D, Do TD. Robust Position Control of an Over-actuated Underwater Vehicle under Model Uncertainties and Ocean Current Effects Using Dynamic Sliding Mode Surface and Optimal Allocation Control. Sensors. 2021; 21(3):747. https://doi.org/10.3390/s21030747
Chicago/Turabian StyleVu, Mai The, Tat-Hien Le, Ha Le Nhu Ngoc Thanh, Tuan-Tu Huynh, Mien Van, Quoc-Dong Hoang, and Ton Duc Do. 2021. "Robust Position Control of an Over-actuated Underwater Vehicle under Model Uncertainties and Ocean Current Effects Using Dynamic Sliding Mode Surface and Optimal Allocation Control" Sensors 21, no. 3: 747. https://doi.org/10.3390/s21030747
APA StyleVu, M. T., Le, T. -H., Thanh, H. L. N. N., Huynh, T. -T., Van, M., Hoang, Q. -D., & Do, T. D. (2021). Robust Position Control of an Over-actuated Underwater Vehicle under Model Uncertainties and Ocean Current Effects Using Dynamic Sliding Mode Surface and Optimal Allocation Control. Sensors, 21(3), 747. https://doi.org/10.3390/s21030747