
The Art of Designing Remote IoT Devices—Technologies and Strategies for a Long Battery Life

 ,
,  , ,
, ,  , and
, and 
Abstract
:1. Introducing Opportunities and Challenges in the Design of Remote IoT Devices
1.1. Opportunities for a Diversity of Applications
1.2. Challenges in Connecting Remote IoT Nodes
- Remote autonomous operation: Ideally the nodes can be installed following a ‘deploy-and-forget’ approach, and are able to operate without short-term maintenance. They should be able to run on limited energy reserves, or on energy harvested from their environment. Ultimately, they will support self-management, including self-diagnostic capabilities. Many applications can tolerate that a packet of information gets delayed in delivery, or even sporadically gets lost.
- ‘Light’ IoT nodes: The nodes should come with a low complexity and a small price tag, taking into account both hardware cost and communication plan. Their integration often requires a small form-factor. They mostly need to perform periodic sensor measurement (with a low duty cycle and non-time critical), with a-periodic time critical events. Intelligence at the gateway and/or cloud can be relied on, and a trade-off can be made in processing at the node or off-node.
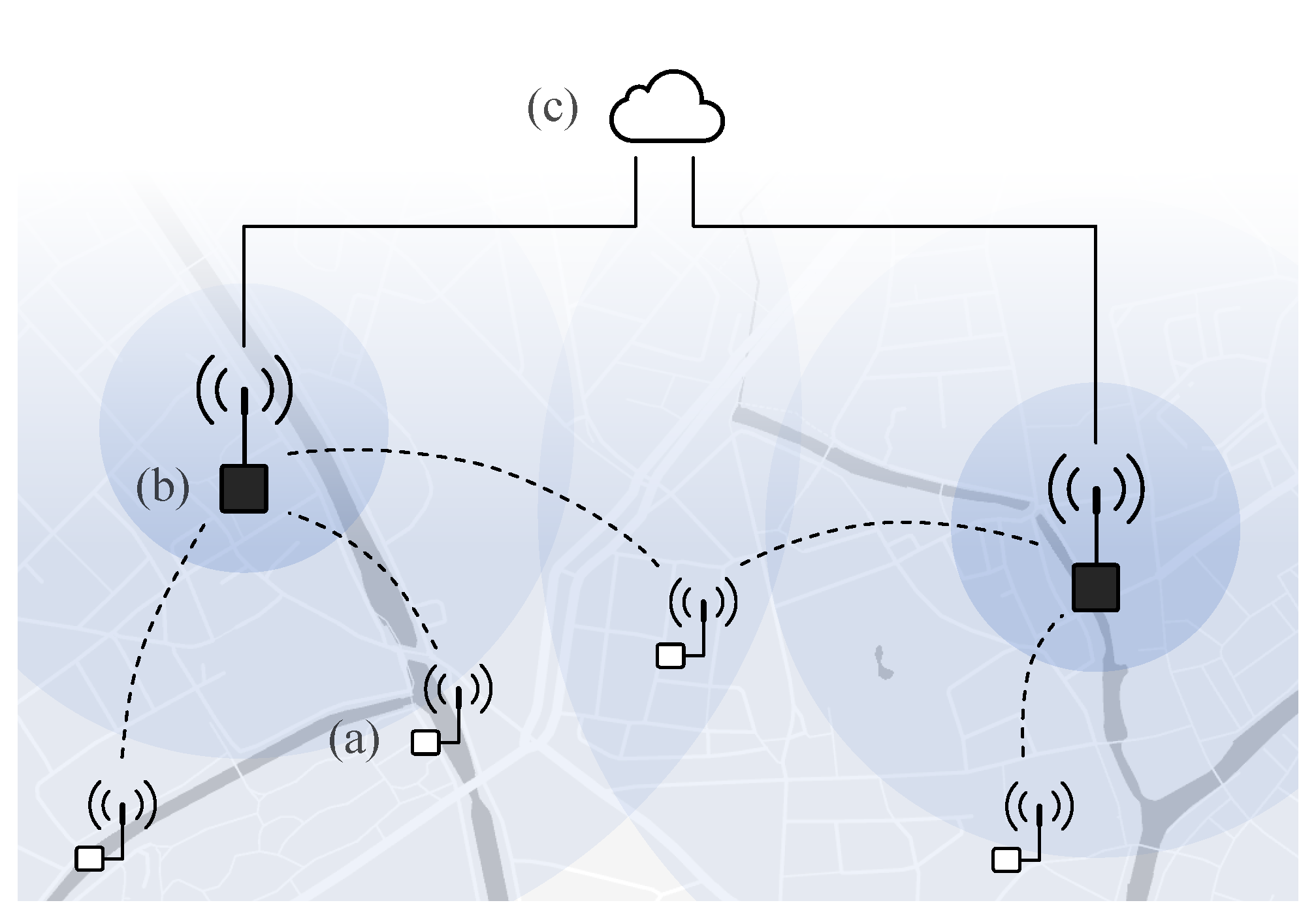
- Large area deployment: the nodes get deployed in a wide range of environments, in (sub-)urban as well as rural areas, and ranging from fields to forests. These applications require long-range wireless communication and have a low packet size. Many application require awareness of the location of the devices [13], while the devices themselves can operate more efficiently by exploiting knowledge on their context [17].
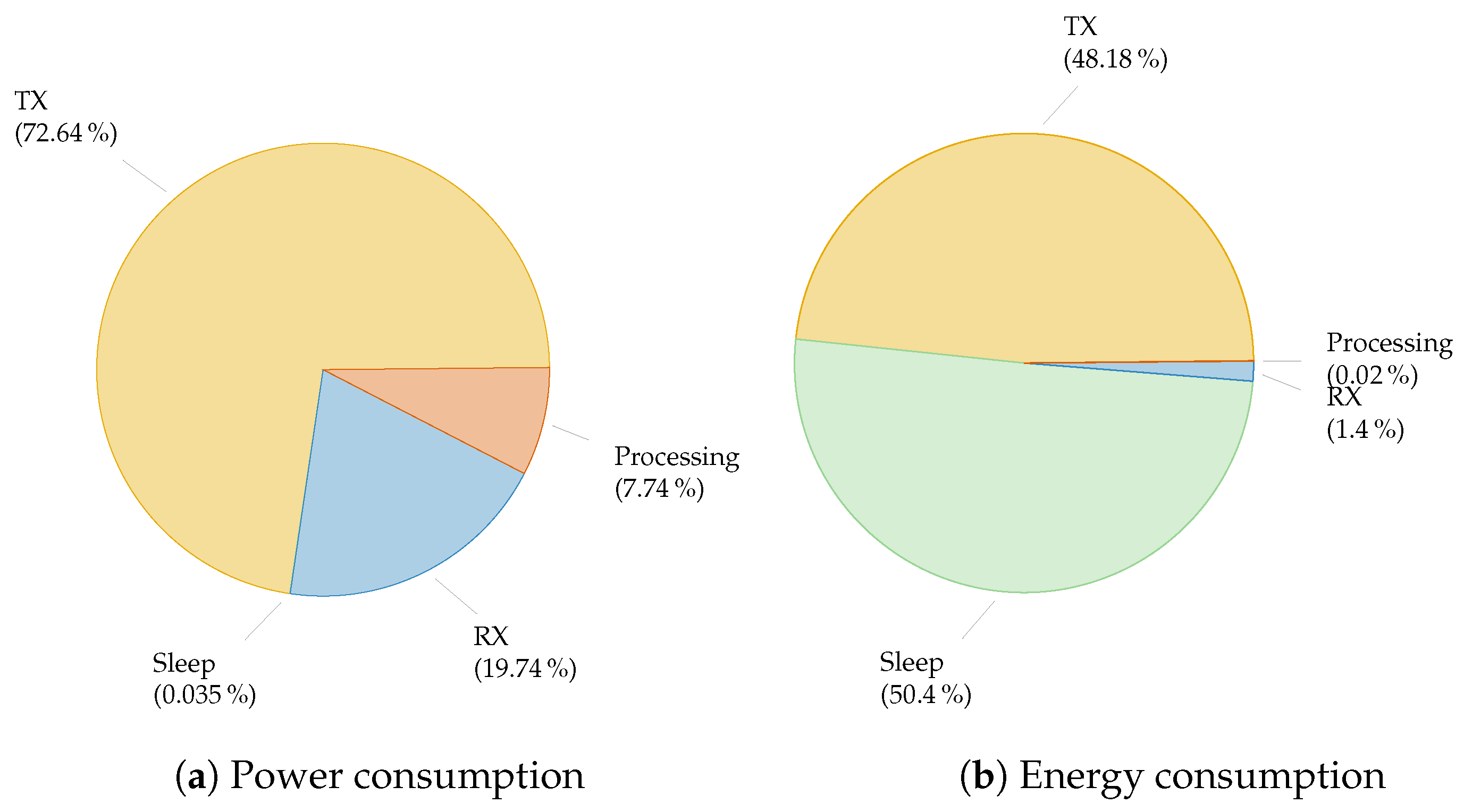
- Make an inventory of operational modes of the device, including active and idle states,
- For each of the modes, estimate the power consumption of the node,
- Calculate the energy consumption by weighing the power consumption with the expected time spent in these modes.
2. Low-Power Wide-Area Networks: The Technological Landscape
2.1. How Can LPWAN Technologies Communicate on a Low-Energy Budget?
2.1.1. Low-Energy Physical Layer
Implementations in LPWAN
2.1.2. Low-Energy MAC Layer
Implementations in LPWAN
2.2. How Can LPWAN Technologies Achieve a Long-Range Connection?
2.2.1. Long-Range Physical Layer
Implementations in LPWAN
2.2.2. Long-Range MAC Layer
Implementations in LPWAN
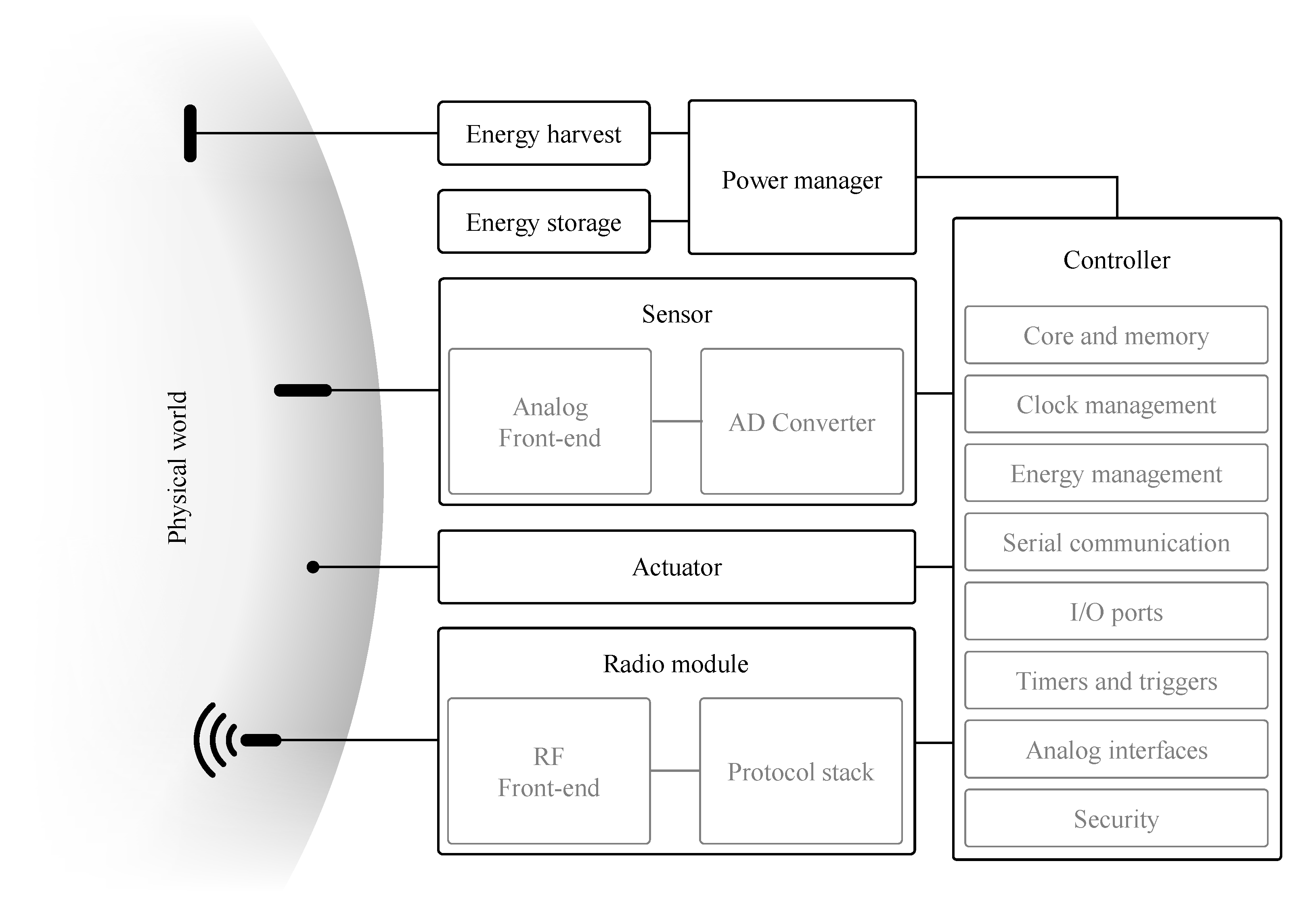
3. Anatomy of an Internet of Things Node
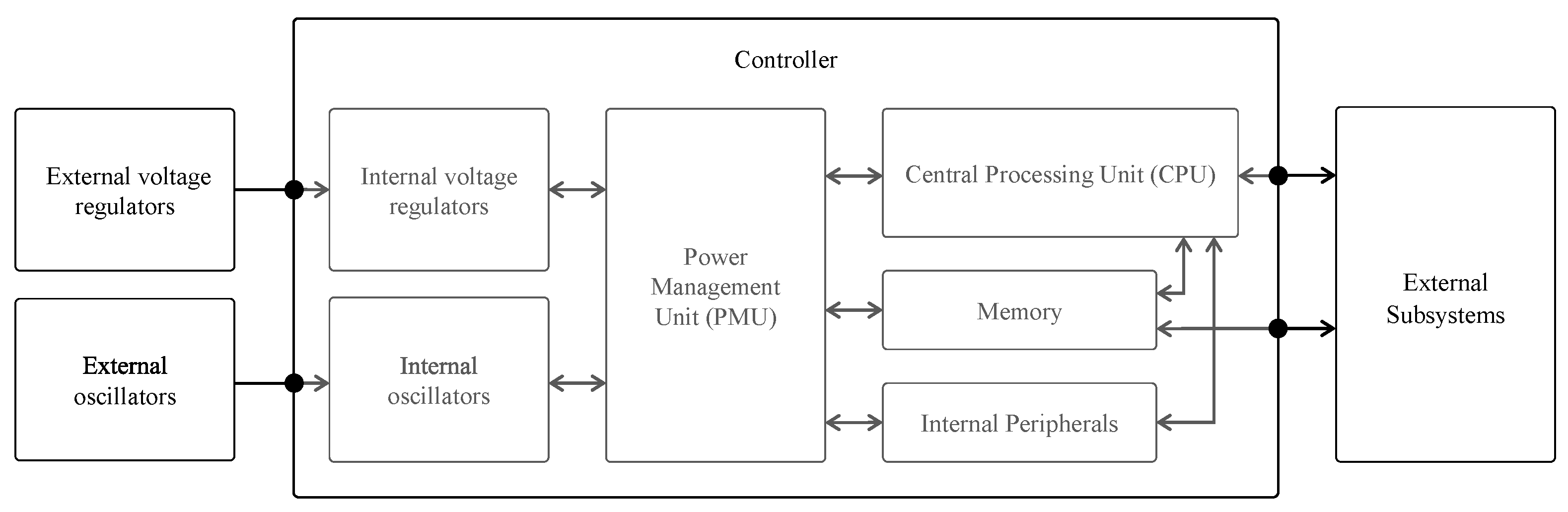
3.1. Controller
3.2. Sensor
- A sleep or power-down function simplifies power management,
- Automatic sampling (with programmable period) omits the need for extra communication with the microcontroller, i.e., it does not continuously need to “tell” the sensor to start a new measurement,
- Programmable thresholds can further reduce communication between the sensor and the controller. For example, an accelerometer will only signal the controller when the measured acceleration is above a certain G-force.
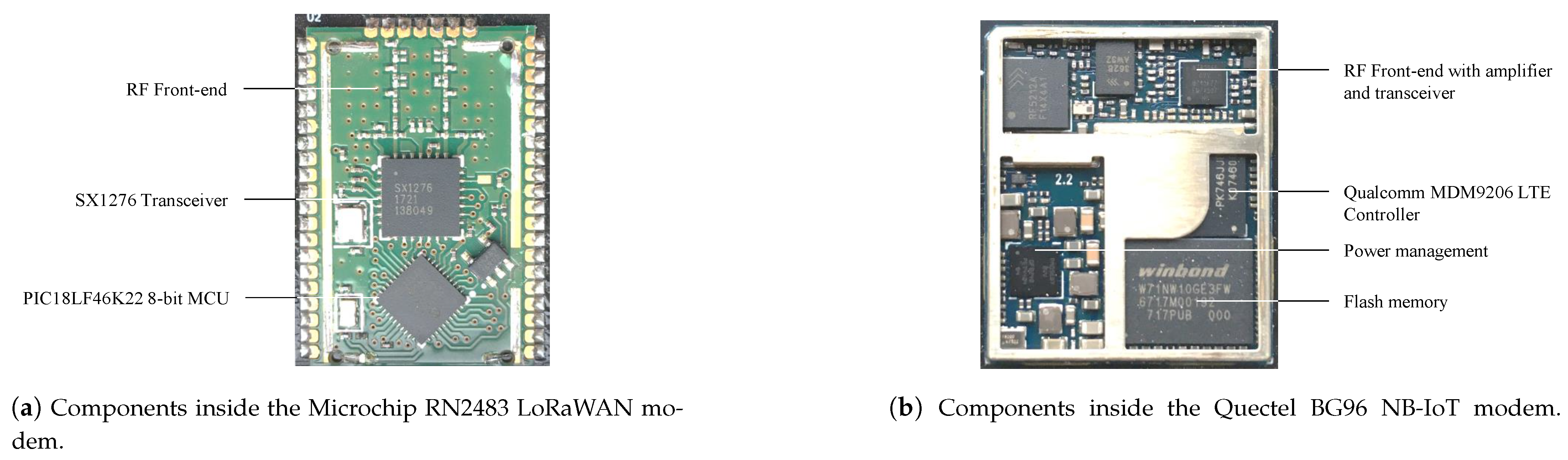
3.3. Radio Module
3.4. Power Management
3.5. Energy Storage
3.5.1. Energy and Power Density
3.5.2. Battery Discharge
3.5.3. Energy Capacity
3.5.4. Operating Temperature
3.5.5. Alternative Rechargeable Storage Solutions
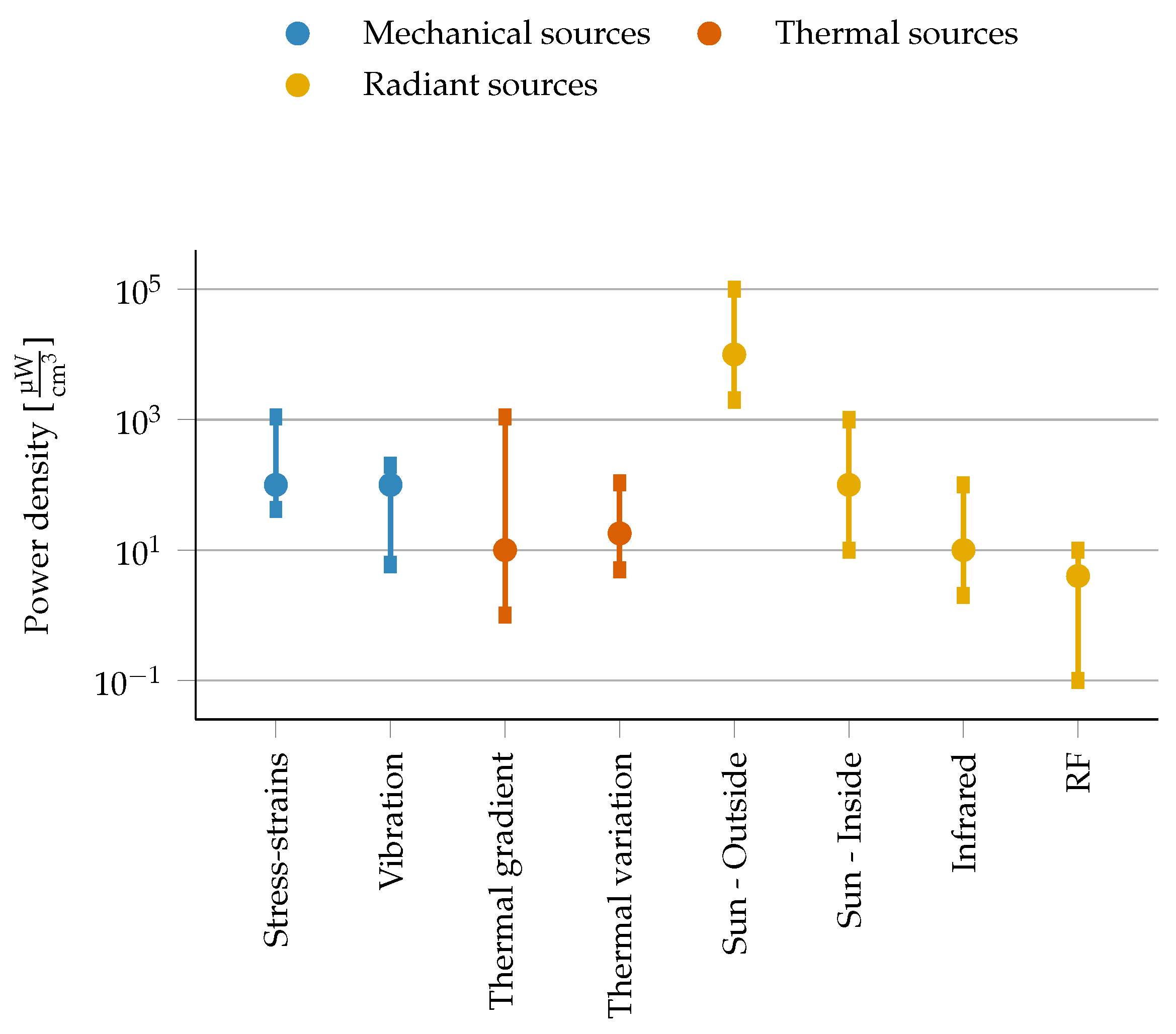
3.6. Energy Harvesting
3.6.1. Sun and Light Sources
3.6.2. Radio Frequency Harvesting
3.6.3. Mechanical Energy Harvesting from Vibrations
3.6.4. Thermal Sources
4. Strategies for a Long Battery Life
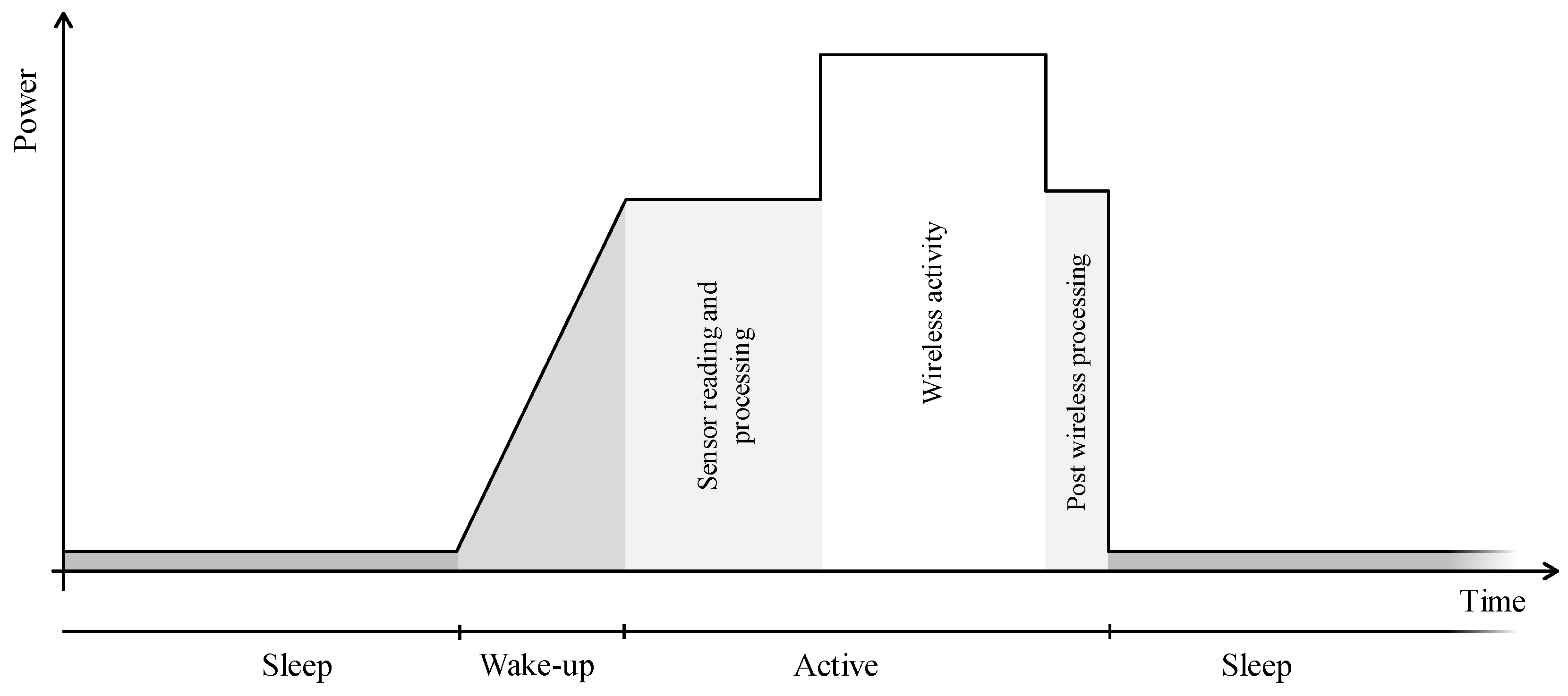
4.1. Sleep
4.1.1. Controller
4.1.2. Power Management
Microcontroller-Based Power Management
PMU-Based Power Management
- When the CPU is executing code, the controller is in energy mode 0. All peripherals can be enabled and the clock speed can be throttled to speed up processing. Enabling extra peripherals will, of course, further increase the current draw,
- In energy mode 1, the CPU clock is disabled. However, all peripherals are still available and they can be configured to work without intervention of the CPU. For example, a timer can be used to periodically start sampling of the ADC which, in turn, uses Direct Memory Access (DMA) to store its samples immediately into memory for later processing by the CPU,
- This mechanism can not be used in energy mode 2, as no high-frequency clocks are available. Only low-power peripherals are available and periodic wake-ups of the CPU can be triggered by using a RTC, running on a low-frequency oscillator,
- In energy mode 3, this RTC is disabled. This means that the CPU can only be woken from an external source, e.g., a pin interrupt on the GPIO. However, data is still being retained in RAM.
- Energy mode 4 is the highest energy efficiency mode, offering almost no functionality. The system can only be woken up by GPIO interrupt.
4.1.3. Sensors
4.1.4. Radio Module
4.2. Wake-Up
4.2.1. Controller
4.2.2. Sensors
4.3. Active
4.3.1. Controller
- Polling data transfer. Data is read using processor instructions. The controller actively polls the sensor for available date. When no data is available, the controller will wait for a pre-programmed amount of time. This time is better spent in a low-power sleep state. After this time, the controller will check again whether (sensor) data is ready. When data is available, it is transferred to memory or directly processed by the CPU,
- Interrupt driven data transfer. Data is read using processor instructions, but the controller does not need to check whether data is ready. When data is available, the sensor will interrupt any controller state by means of a changing GPIO pin. The controller will wake from sleep or interrupt its current process and acknowledge by starting the data transfer using the CPU,
- Direct Memory Access. Data is read from the peripheral, not by using processor instructions but by using the integrated Direct Memory Access Controller (DMAC). This will transfer the incoming data directly to a programmed memory block. The processor continues to wait in a low power until the DMAC calls an interrupt after the last byte is transferred. As IO operations are much slower than CPU operations, this results in a considerable energy saving.
4.3.2. Radio Module
4.3.3. Power Manager
4.4. Exemplary Use Case: Acoustic Event Detection
4.4.1. How to Sense?
4.4.2. Choosing a Wireless Technology
5. Conclusions and Outlook
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| A-GPS | Assisted Global Positioning System |
| ABP | Authentication By Personalisation |
| ADC | Analog-to-Digital Converter |
| ADR | Adaptive Data Rate |
| AES | Advanced Encryption Standard |
| ALK | Alkaline |
| AT | ATtention |
| AWGN | Additive White Gaussian Noise |
| BOD | Brown-Out Detection |
| BPSK | Binary Phase Shift Keying |
| CE | Coverage Enhancement |
| CMOS | Complementary Metal-Oxide-Semiconductor |
| CPU | Central Processing Unit |
| CRC | Cycle Redundancy Check |
| CSS | Chirp Spread Spectrum |
| DBPSK | Differential Binary Phase Shift Keying |
| DMA | Direct Memory Access |
| DMAC | Direct Memory Access Controller |
| ECC | Elliptic-Curve Cryptography |
| EDLC | Electric Double-Layer Capacitor |
| eDRX | Extended Discontinuous Reception Mode |
| EM | Electromagnetic |
| FFT | Fast Fourrier Transfomation |
| FSK | Frequency-Shift Keying |
| GNSS | Global Navigation Satellite System |
| GPIO | General-Purpose Input/Output |
| GPS | Global Positioning System |
| GSM | Global Systemfor Mobile Communications |
| I2C | Inter-Integrated Circuit |
| IMU | Inertial Measurement Unit |
| IO | Input/Output |
| IoT | Internet of Things |
| ISM | Industrial, Scientific and Medical |
| LCO | Lithium Cobalt Oxide |
| LDO | Low-Dropout Regulator |
| LED | Light Emitting Diode |
| LIC | Lithium-ion Capacitor |
| LID | Lithium Iron Disulfide |
| LIPO | Lithium Polymer |
| LMD | Lithium Manganese Dioxide |
| LoRa | Long Range |
| LoRaWAN | Long-Range Wide-Area Network |
| LPWAN | Low-Power Wide-Area Network |
| LPWANs | Low-Power Wide-Area Networks |
| LTC | Lithium Thionyl Chloride |
| LTE | Long Term Evolution |
| LTO | Lithium Titanium Oxide |
| M2M | Machine-to-Machine |
| MAC | Medium Access Control |
| MCL | Maximum Coupling Loss |
| MCU | Microcontroller Unit |
| MPPT | Maximum Power Point Tracking |
| MTC | Machine-Type Communication |
| Multi-RAT | Multiple Radio Access Technology |
| NB-IoT | Narrowband IoT |
| OFDMA | Orthogonal Frequency Division Multiple Access |
| OTAA | Over The Air Authentication |
| PA | Power Amplifier |
| PAPR | Peak-to-Average Power Ratio |
| PC | Lithium Poly Carbon |
| PCB | Printed Circuit Board |
| PHY | Physical |
| PLL | Phased Locked Loop |
| PMU | Power Management Unit |
| PRS | Peripheral Reflex System |
| PSM | Power Saving Mode |
| PV | Photovoltaic |
| QAM | Quadrature Amplitude Modulation |
| QPSK | Quadrature Phase Shift Keying |
| RAM | Random-Access Memory |
| RF | Radio Frequency |
| RTC | Real Time Clock |
| SC-FDMA | Single-Carrier Frequency Division Multiple Access |
| SHA | Secure Hash Algorithm |
| SNR | Signal-to-Noise Ratio |
| SOC | System on Chip |
| SPI | Serial Peripheral Interface |
| TAU | Tracking Area Update |
| TPMS | Tire-Pressure Monitoring System |
| TTFF | Time To First Fix |
| UART | Universal Asynchronous Receiver/Transmitter |
| UV | Unmanned Vehicle |
| VOC | Voltatile Organic Compound |
References
- Thoen, B.; Callebaut, G.; Leenders, G.; Wielandt, S. A Deployable LPWAN Platform for Low-Cost and Energy-Constrained IoT Applications. Sensors 2019, 19, 585. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Meeus, S.; Arnouts, H.; Comhaire, L.; Van Ranst, D.; Callebaut, G.; Van der Perre, L. Monitoring Trees in Cities using the Internet of Trees. In Proceedings of the 18th Symposium on Life Sciences for Sustainable Development (USAMV Cluj-Napoca), Cluj-Napoca, Romania, 25–28 September 2019. [Google Scholar]
- Perles, A.; Pérez-Marín, E.; Mercado, R.; Segrelles, J.D.; Blanquer, I.; Zarzo, M.; Garcia-Diego, F.J. An energy-efficient internet of things (IoT) architecture for preventive conservation of cultural heritage. Future Gener. Comput. Syst. 2018, 81, 566–581. [Google Scholar] [CrossRef]
- Merello, P.; García-Diego, F.J.; Zarzo, M. Microclimate monitoring of Ariadne’s house (Pompeii, Italy) for preventive conservation of fresco paintings. Chem. Cent. J. 2012, 6, 145. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Suzuki, L.R. Smart Cities IoT: Enablers and Technology Road Map. In Smart City Networks: Through the Internet of Things; Rassia, S.T., Pardalos, P.M., Eds.; Springer International Publishing: Cham, Switzerland, 2017; pp. 167–190. [Google Scholar] [CrossRef]
- Arasteh, H.; Hosseinnezhad, V.; Loia, V.; Tommasetti, A.; Troisi, O.; Shafie-khah, M.; Siano, P. Iot-based smart cities: A survey. In Proceedings of the 2016 IEEE 16th International Conference on Environment and Electrical Engineering (EEEIC), Florence, Italy, 7–10 June 2016; pp. 1–6. [Google Scholar] [CrossRef]
- Cerchecci, M.; Luti, F.; Mecocci, A.; Parrino, S.; Peruzzi, G.; Pozzebon, A. A Low Power IoT Sensor Node Architecture for Waste Management Within Smart Cities Context. Sensors 2018, 18, 1282. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Medvedev, A.; Fedchenkov, P.; Zaslavsky, A.; Anagnostopoulos, T.; Khoruzhnikov, S. Waste Management as an IoT-Enabled Service in Smart Cities. In Internet of Things, Smart Spaces, and Next Generation Networks and Systems; Balandin, S., Andreev, S., Koucheryavy, Y., Eds.; Springer International Publishing: Cham, Switzerland, 2015; pp. 104–115. [Google Scholar]
- Anagnostopoulos, T.; Zaslavsky, A.; Kolomvatsos, K.; Medvedev, A.; Amirian, P.; Morley, J.; Hadjieftymiades, S. Challenges and Opportunities of Waste Management in IoT-Enabled Smart Cities: A Survey. IEEE Trans. Sustain. Comput. 2017, 2, 275–289. [Google Scholar] [CrossRef]
- Magno, M.; Aoudia, F.A.; Gautier, M.; Berder, O.; Benini, L. WULoRa: An energy efficient IoT end-node for energy harvesting and heterogeneous communication. In Proceedings of the Design, Automation Test in Europe Conference Exhibition (DATE), Lausanne, Switzerland, 27–31 March 2017; pp. 1528–1533. [Google Scholar] [CrossRef] [Green Version]
- Bharadwaj, A.S.; Rego, R.; Chowdhury, A. IoT based solid waste management system: A conceptual approach with an architectural solution as a smart city application. In Proceedings of the 2016 IEEE Annual India Conference (INDICON), Bangalore, India, 16–18 December 2016; pp. 1–6. [Google Scholar] [CrossRef]
- Hong, I.; Park, S.; Lee, B.; Lee, J.; Jeong, D.; Park, S. IoT-based smart garbage system for efficient food waste management. Sci. World J. 2014, 2014. [Google Scholar] [CrossRef]
- Wen, Z.; Hu, S.; De Clercq, D.; Beck, M.B.; Zhang, H.; Zhang, H.; Fei, F.; Liu, J. Design, implementation, and evaluation of an Internet of Things (IoT) network system for restaurant food waste management. Waste Manag. 2018, 73, 26–38. [Google Scholar] [CrossRef]
- Santos, C.; Jiménez, J.A.; Espinosa, F. Effect of event-based sensing on IoT node power Efficiency. Case study: Air quality monitoring in smart cities. IEEE Access 2019, 7, 132577–132586. [Google Scholar] [CrossRef]
- Lee, J.; Bagheri, B.; Jin, C. Introduction to cyber manufacturing. Manuf. Lett. 2016, 8, 11–15. [Google Scholar] [CrossRef] [Green Version]
- Prasse, C.; Nettstraeter, A.; Hompel, M. How IoT will change the design and operation of logistics systems. In Proceedings of the 2014 International Conference on the Internet of Things (IOT), Seoul, Korea, 6–8 March 2014; pp. 55–60. [Google Scholar] [CrossRef]
- Sen, S. Invited: Context-aware energy-efficient communication for IoT sensor nodes. In Proceedings of the 2016 53nd ACM/EDAC/IEEE Design Automation Conference (DAC), Austin, TX, USA, 5–9 June 2016; pp. 1–6. [Google Scholar] [CrossRef]
- Callebaut, G.; Ottoy, G.; van der Perre, L. Cross-Layer Framework and Optimization for Efficient Use of the Energy Budget of IoT Nodes. In Proceedings of the 2019 IEEE Wireless Communications and Networking Conference (WCNC), Marrakech, Morocco, 15–19 April 2019; pp. 1–6. [Google Scholar] [CrossRef] [Green Version]
- Adelantado, F.; Vilajosana, X.; Tuset-Peiró, P.; Martínez, B.; Melià, J. Understanding the Limits of LoRaWAN. In CoRR; 2016. Available online: http://xxx.lanl.gov/abs/1607.08011 (accessed on 30 December 2020). [CrossRef] [Green Version]
- Ismail, D.; Rahman, M.; Saifullah, A. Low-power wide-area networks: opportunities, challenges, and directions. In Proceedings of the Workshop Program of the 19th International Conference on Distributed Computing and Networking, Varanasi, India, 4–7 January 2018; pp. 1–6. [Google Scholar]
- Sornin, N.; Luis, M.; Eirich, T.; Kramp, T.; Hersent, O. Lorawan Specification. LoRa Alliance 2015. Available online: https://osch.oss-cn-shanghai.aliyuncs.com/blogContentFileSnapshot/1556464676588.pdf (accessed on 30 December 2020).
- Zuniga, J.C.; Ponsard, B. Sigfox System Description. LPWAN@ IETF97, Nov. 14th 2016. Volume 25. Available online: https://datatracker.ietf.org/meeting/97/materials/slides-97-lpwan-25-sigfox-system-description-00.pdf (accessed on 30 December 2020).
- GSM Association. NB-IoT Deployment Guide to Basic Feature Set Requirements, Version 2.0. White Paper, Official Document CLP. 2018, Volume 28. Available online: https://www.gsma.com/newsroom/wp-content/uploads//CLP.28-v2.0.pdf (accessed on 30 December 2020).
- Roth, Y.; Doré, J.B.; Ros, L.; Berg, V. The Physical Layer of Low Power Wide Area Networks: Strategies, Information Theory’s Limit and Existing Solutions. In Advances in Signal Processing: Reviews; Book Series; IFSA Publishing: Barcelona, Spain, 2018; Volume 1. [Google Scholar]
- Bachir, A.; Dohler, M.; Watteyne, T.; Leung, K.K. MAC Essentials for Wireless Sensor Networks. IEEE Commun. Surv. Tutor. 2010, 12, 222–248. [Google Scholar] [CrossRef] [Green Version]
- Sklar, B. Digital Communications: Fundamentals and Applications. IEICE Trans. Commun. 2020, 91, 1612–1614. [Google Scholar]
- Callebaut, G.; Van der Perre, L. Characterization of LoRa Point-to-Point Path Loss: Measurement Campaigns and Modeling Considering Censored Data. IEEE Internet Things J. 2020, 7, 1910–1918. [Google Scholar] [CrossRef]
- Cui, S.; Goldsmith, A.J.; Bahai, A. Energy-constrained modulation optimization. IEEE Trans. Wirel. Commun. 2005, 4, 2349–2360. [Google Scholar]
- Auer, G.; Giannini, V.; Desset, C.; Godor, I.; Skillermark, P.; Olsson, M.; Imran, M.A.; Sabella, D.; Gonzalez, M.J.; Blume, O.; et al. How much energy is needed to run a wireless network? IEEE Wirel. Commun. 2011, 18, 40–49. [Google Scholar] [CrossRef]
- Li, Y.; Lopez, J.; Wu, P.; Hu, W.; Wu, R.; Lie, D.Y.C. A SiGe Envelope-Tracking Power Amplifier With an Integrated CMOS Envelope Modulator for Mobile WiMAX/3GPP LTE Transmitters. IEEE Trans. Microw. Theory Tech. 2011, 59, 2525–2536. [Google Scholar] [CrossRef]
- Kanj, M.; Savaux, V.; Le Guen, M. A Tutorial on NB-IoT Physical Layer Design. IEEE Commun. Surv. Tutor. 2020, 22, 2408–2446. [Google Scholar] [CrossRef]
- Wang, Y.E.; Lin, X.; Adhikary, A.; Grovlen, A.; Sui, Y.; Blankenship, Y.; Bergman, J.; Razaghi, H.S. A Primer on 3GPP Narrowband Internet of Things. IEEE Commun. Mag. 2017, 55, 117–123. [Google Scholar] [CrossRef]
- Berardinelli, G.; de Temino, L.A.M.R.; Frattasi, S.; Rahman, M.I.; Mogensen, P. OFDMA vs. SC-FDMA: Performance comparison in local area IMT-A scenarios. IEEE Wirel. Commun. 2008, 15, 64–72. [Google Scholar] [CrossRef]
- Hoglund, A.; Lin, X.; Liberg, O.; Behravan, A.; Yavuz, E.A.; Van Der Zee, M.; Sui, Y.; Tirronen, T.; Ratilainen, A.; Eriksson, D. Overview of 3GPP release 14 enhanced NB-IoT. IEEE Netw. 2017, 31, 16–22. [Google Scholar] [CrossRef]
- Lavric, A.; Petrariu, A.I.; Popa, V. Long Range SigFox Communication Protocol Scalability Analysis Under Large-Scale, High-Density Conditions. IEEE Access 2019, 7, 35816–35825. [Google Scholar] [CrossRef]
- Casals, L.; Mir, B.; Vidal, R.; Gomez, C. Modeling the Energy Performance of LoRaWAN. Sensors 2017, 17, 2364. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Gomez, C.; Veras, J.C.; Vidal, R.; Casals, L.; Paradells, J. A Sigfox Energy Consumption Model. Sensors 2019, 19, 681. [Google Scholar] [CrossRef] [Green Version]
- Martiradonna, S.; Piro, G.; Boggia, G. On the Evaluation of the NB-IoT Random Access Procedure in Monitoring Infrastructures. Sensors 2019, 19, 3237. [Google Scholar] [CrossRef] [Green Version]
- Leenders, G.; Callebaut, G.; Van der Perre, L.; De Strycker, L. An Experimental Evaluation of Energy Trade-Offs in Narrowband IoT. In Proceedings of the 2020 IEEE 6th World Forum on Internet of Things (WF-IoT), New Orleans, LA, USA, 2–16 July 2020; pp. 1–5. [Google Scholar]
- Friis, H.T. A Note on a Simple Transmission Formula. Proc. IRE 1946, 34, 254–256. [Google Scholar] [CrossRef]
- Kufakunesu, R.; Hancke, G.P.; Abu-Mahfouz, A.M. A Survey on Adaptive Data Rate Optimization in LoRaWAN: Recent Solutions and Major Challenges. Sensors 2020, 20, 5044. [Google Scholar] [CrossRef]
- Jimenez, M.; Palomera, R.; Couvertier, I. Introduction to Embedded Systems: Using Microcontrollers and the MSP430; Springer: Berlin/Heidelberg, Germany, 2014; pp. 1–648. [Google Scholar] [CrossRef]
- AN0025: Peripheral Reflex System (PRS). Technical Report, Silicon Labs Laboratories. Rev. 1.08. Available online: www.silabs.com/documents/public/application-notes/an0025-efm32-prs.pdf (accessed on 30 December 2020).
- Fraden, J. Handbook of Modern Sensors, 5th ed.; Springer: Berlin/Heidelberg, Germany, 2016. [Google Scholar]
- Fischer, A.C.; Forsberg, F.; Lapisa, M.; Bleiker, S.J.; Stemme, G.; Roxhed, N.; Niklaus, F. Integrating MEMS and ICs. Microsyst. Nanoeng. 2015, 1. [Google Scholar] [CrossRef] [Green Version]
- ADIS16488A Tactical Grade, Ten Degrees of Freedom Inertial Sensor. Technical Report, Analog Devices. Available online: www.analog.com/media/en/technical-documentation/data-sheets/ADIS16488A.pdf (accessed on 30 December 2020).
- BME680 Low Power Gas, Pressure, Temperature & Humidity Sensor. Technical Report, Bosch Sensortec. Rev. 1.5. Available online: https://www.bosch-sensortec.com/media/boschsensortec/downloads/datasheets/bst-bme680-ds001.pdf (accessed on 30 December 2020).
- Djuknic, G.M.; Richton, R.E. Geolocation and assisted GPS. Computer 2001, 34, 123–125. [Google Scholar] [CrossRef]
- Sather, J. Battery technologies for IoT. In Enabling the Internet of Things; Springer: Berlin/Heidelberg, Germany, 2017; pp. 409–440. [Google Scholar]
- Gramlich. Ansmann Industrial Alkaline Battery AA-Size. ANSMANN. Available online: docs.rs-online.com/4217/0900766b81682440.pdf (accessed on 30 December 2020).
- Tadiran Batteries. LTC Batteries SL-360 AA. Tadiran Batteries GmbH. Available online: docs.rs-online.com/9168/0900766b8070972c.pdf (accessed on 30 December 2020).
- RS PRO. Lithium Battery CR123A. Available online: docs.rs-online.com/c5bf/0900766b81583902.pdf (accessed on 30 December 2020).
- TG. Ansmann Lithium Battery “Industrial” AA-size. ANSMANN. Available online: docs.rs-online.com/ab89/0900766b813c3f6e.pdf (accessed on 30 December 2020).
- PT. Panasonic Gobel Energy Indonesia. Poly-Carbonmonofluoride Lithium Battery BR-1/2AA. Panasonic Corporation Energy Company. Available online: www.farnell.com/datasheets/1766151.pdf (accessed on 30 December 2020).
- Samsung SDI. INR18650-29E. Samsung. Available online: eu.nkon.nl/sk/k/29E.pdf (accessed on 30 December 2020).
- Cellevia BATTERIES. LP584070. Available online: www.tme.com/Document/c8a652e1696b3378d5fd2920892bd230/cel0008.pdf (accessed on 30 December 2020).
- Salameh, Z.; Kim, B. Advanced lithium polymer batteries. In Proceedings of the 2009 IEEE Power & Energy Society General Meeting, Calgary, AB, Canada, 26–30 July 2009; pp. 1–5. [Google Scholar]
- Sanyo Liont e. Lithion Ion. Available online: https://web.archive.org/web/20160309053749/http://rathboneenergy.com/articles/sanyo_liont_e.pdf (accessed on 30 December 2020).
- Jain, M.; Nagasubramanian, G.; Jungst, R.G.; Weidner, J.W. Analysis of a Lithium/Thionyl Chloride Battery under Moderate-Rate Discharge. J. Electrochem. Soc. 1999, 146, 4023. [Google Scholar]
- Energizer Brands, L. Alkaline Manganese Dioxide Handbook and Application Manual. Energizer. Available online: data.energizer.com/pdfs/alkaline_appman.pdf (accessed on 30 December 2020).
- Aris, A.M.; Shabani, B. An experimental study of a lithium ion cell operation at low temperature conditions. Energy Procedia 2017, 110, 128–135. [Google Scholar] [CrossRef]
- Sun, X.; An, Y.; Geng, L.; Zhang, X.; Wang, K.; Yin, J.; Huo, Q.; Wei, T.; Zhang, X.; Ma, Y. Leakage current and self-discharge in lithium-ion capacitor. J. Electroanal. Chem. 2019, 850, 113386. [Google Scholar] [CrossRef]
- Wang, L.; Wang, Z.; Ju, Q.; Wang, W.; Wang, Z. Characteristic analysis of lithium titanate battery. Energy Procedia 2017, 105, 4444–4449. [Google Scholar] [CrossRef]
- Bolufawi, O.; Shellikeri, A.; Zheng, J.P. Lithium-Ion Capacitor Safety Testing for Commercial Application. Batteries 2019, 5, 74. [Google Scholar] [CrossRef] [Green Version]
- Zhang, X.; Peng, H.; Wang, H.; Ouyang, M. Hybrid lithium iron phosphate battery and lithium titanate battery systems for electric buses. IEEE Trans. Veh. Technol. 2017, 67, 956–965. [Google Scholar] [CrossRef]
- Liu, X.; Sánchez-Sinencio, E. An 86% Efficiency 12 µW Self-Sustaining PV Energy Harvesting System With Hysteresis Regulation and Time-Domain MPPT for IOT Smart Nodes. IEEE J. Solid State Circuits 2015, 50, 1424–1437. [Google Scholar] [CrossRef]
- Shaikh, F.K.; Zeadally, S. Energy harvesting in wireless sensor networks: A comprehensive review. Renew. Sustain. Energy Rev. 2016, 55, 1041–1054. [Google Scholar] [CrossRef]
- Adu-Manu, K.S.; Adam, N.; Tapparello, C.; Ayatollahi, H.; Heinzelman, W. Energy-Harvesting Wireless Sensor Networks (EH-WSNs): A Review. ACM Trans. Sens. Netw. 2018, 14. [Google Scholar] [CrossRef]
- La Rosa, R.; Livreri, P.; Trigona, C.; Di Donato, L.; Sorbello, G. Strategies and Techniques for Powering Wireless Sensor Nodes through Energy Harvesting and Wireless Power Transfer. Sensors 2019, 19, 2660. [Google Scholar] [CrossRef] [Green Version]
- Jeon, K.E.; Tong, T.; She, J. Preliminary design for sustainable BLE beacons powered by solar panels. In Proceedings of the 2016 IEEE Conference on Computer Communications Workshops (INFOCOM WKSHPS), San Francisco, CA, USA, 10–15 April 2016; pp. 103–109. [Google Scholar]
- Spanggaard, H.; Krebs, F.C. A brief history of the development of organic and polymeric photovoltaics. Sol. Energy Mater. Sol. Cells 2004, 83, 125–146. [Google Scholar] [CrossRef]
- Luo, P.; Peng, D.; Wang, Y.; Zheng, X. Review of Solar Energy Harvesting for IoT Applications. In Proceedings of the 2018 IEEE Asia Pacific Conference on Circuits and Systems (APCCAS), Chengdu, China, 26–30 October 2018; pp. 512–515. [Google Scholar]
- Moon, E.; Blaauw, D.; Phillips, J.D. Subcutaneous photovoltaic infrared energy harvesting for bio-implantable devices. IEEE Trans. Electron Devices 2017, 64, 2432–2437. [Google Scholar] [CrossRef] [PubMed]
- Pizzotti, M.; Perilli, L.; del Prete, M.; Fabbri, D.; Canegallo, R.; Dini, M.; Masotti, D.; Costanzo, A.; Franchi Scarselli, E.; Romani, A. A Long-Distance RF-Powered Sensor Node with Adaptive Power Management for IoT Applications. Sensors 2017, 17, 1732. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Piyare, R.; Murphy, A.L.; Kiraly, C.; Tosato, P.; Brunelli, D. Ultra Low Power Wake-Up Radios: A Hardware and Networking Survey. IEEE Commun. Surv. Tutor. 2017, 19, 2117–2157. [Google Scholar] [CrossRef]
- Mazloum, N.S.; Edfors, O. Performance Analysis and Energy Optimization of Wake-Up Receiver Schemes for Wireless Low-Power Applications. IEEE Trans. Wirel. Commun. 2014, 13, 7050–7061. [Google Scholar] [CrossRef] [Green Version]
- Boisseau, S.; Despesse, G.; Seddik, B.A. Electrostatic conversion for vibration energy harvesting. In Small-Scale Energy Harvesting; BoD—Books on Demand: Norderstedt, Germany, 2012; pp. 1–39. [Google Scholar]
- Faranda, R.; Leva, S. Energy comparison of MPPT techniques for PV Systems. WSEAS Trans. Power Syst. 2008, 3, 446–455. [Google Scholar]
- Snyder, G.J. Thermoelectric energy harvesting. In Energy Harvesting Technologies; Springer: Berlin/Heidelberg, Germany, 2009; pp. 325–336. [Google Scholar]
- Vullers, R.J.; Van Schaijk, R.; Visser, H.J.; Penders, J.; Van Hoof, C. Energy harvesting for autonomous wireless sensor networks. IEEE Solid State Circuits Mag. 2010, 2, 29–38. [Google Scholar]
- Cook-Chennault, K.A.; Thambi, N.; Sastry, A.M. Powering MEMS portable devices—A review of non-regenerative and regenerative power supply systems with special emphasis on piezoelectric energy harvesting systems. Smart Mater. Struct. 2008, 17, 043001. [Google Scholar] [CrossRef] [Green Version]
- Helms, D.; Schmidt, E.; Nebel, W. Leakage in CMOS circuits—An introduction. In International Workshop on Power and Timing Modeling, Optimization and Simulation; Springer: Berlin/Heidelberg, Germany, 2004; pp. 17–35. [Google Scholar]
- eXtreme Low-Power (XLP) PIC Microcontrollers: An Introduction to Microchip’s Low Power Devices, AN1267. Technical Report, Microchip. Available online: ww1.microchip.com/downloads/en/AppNotes/00001267b.pdf (accessed on 30 December 2020).
- Salas, M. Low Power Design Basics: How to Choose the Optimal Low Power MCU for your Embedded System. Technical Report, Silicon Labs Laboratories. Available online: https://silabs-prod.adobecqms.net/documents/public/white-papers/picking-the-right-microcontroller-based-on-low-power-specs.pdf (accessed on 30 December 2020).
- PIC Microcontroller Low Power Tips ’n Tricks, DS01146B; Technical Report; Microchip Technology Inc.: Chandler, AZ, USA, 2009.
- Atmel. Peripheral Power Consumption in Standby Mode for SAM D Devices, AT11491. Technical Report, Microchip. Available online: http://ww1.microchip.com/downloads/en/AppNotes/Atmel-42472-Peripheral-Power-Consumption-in-Standby-Mode-for-SAM-D-Devices_ApplicationNote_AT6490.pdf (accessed on 30 December 2020).
- Microchip. PIC16(L)F1717/8/9: Cost-Effective 8-Bit Intelligent Analog Flash Microcontrollers, DS40001740C. Technical Report, Microchip. Available online: http://ww1.microchip.com/downloads/en/DeviceDoc/PIC16F1717_8_9-data-sheet-40001740C.pdf (accessed on 30 December 2020).
- Microchip. PIC24FJ128GA310 Family, DS30009996G. Technical Report, Microchip. Available online: http://ww1.microchip.com/downloads/en/DeviceDoc/30009996g.pdf (accessed on 30 December 2020).
- Instruments, T. TPS22860 Ultra-Low Leakage Load Switch, SLVSD04. Technical Report, Texas Instruments. Available online: https://www.ti.com/lit/ds/symlink/tps22860.pdf (accessed on 30 December 2020).
- Instruments, T. LP2985 150-mA Low-Noise Low-Dropout Regulator with Shutdown, SLVS522O. Technical Report, Texas Instruments. Available online: https://www.ti.com/lit/ds/symlink/lp2985.pdf (accessed on 30 December 2020).
- Silicon Labs. AN0007.0: MCU and Wireless MCU Energy Energy Modes 2017. Rev. 1.10. Available online: https://www.silabs.com/documents/public/application-notes/an0007.0-efm32-ezr32-series-0-energymodes.pdf (accessed on 30 December 2020).
- Mayer, P.; Magno, M.; Brunner, T.; Benini, L. LoRa vs. LoRa: In-Field Evaluation and Comparison For Long-Lifetime Sensor Nodes. In Proceedings of the 2019 IEEE 8th International Workshop on Advances in Sensors and Interfaces (IWASI), Otranto, Italy, 13–14 June 2019; pp. 307–311. [Google Scholar]
- Lehtinen, M.; Happonen, A.; Ikonen, J. Accuracy and time to first fix using consumer-grade GPS receivers. In Proceedings of the 2008 16th International Conference on Software, Telecommunications and Computer Networks, Edinburgh, UK, 16–18 June 2008; pp. 334–340. [Google Scholar]
- Haxhibeqiri, J.; De Poorter, E.; Moerman, I.; Hoebeke, J. A survey of LoRaWAN for IoT: From technology to application. Sensors 2018, 18, 3995. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Sallouha, H.; Chiumento, A.; Pollin, S. Localization in long-range ultra narrow band IoT networks using RSSI. In Proceedings of the 2017 IEEE International Conference on Communications (ICC), Paris, France, 21–25 May 2017; pp. 1–6. [Google Scholar] [CrossRef] [Green Version]
- Kamal, R. Microcontrollers: Architecture, Programming, Interfacing and System Design; Pearson Education: Tamil Nadu, India, 2011. [Google Scholar]
- Chew, T.S.; Tuttle, M. Application Note 2—Using the VM1010 Wake-on-Sound Microphone and Zero Power ListeningTM Technology. Technical Report, Vesper Technologies. 2018. Rev. 4. Available online: www.digikey.be/nl/pdf/v/vesper/using-vm1010-wake-on-sound-microphone (accessed on 30 December 2020). [CrossRef]
- Callebaut, G.; Ottoy, G.; Leenders, G.; Thoen, B.; Strycker, L.D.; der Perre, L.V. Remote IoT devices: Sleepy strategies and signal processing to the rescue for a long battery life. arXiv 2019, arXiv:eess.SP/1901.06836. [Google Scholar]
- Singh, R.K.; Puluckul, P.P.; Berkvens, R.; Weyn, M. Energy Consumption Analysis of LPWAN Technologies and Lifetime Estimation for IoT Application. Sensors 2020, 20, 4794. [Google Scholar] [CrossRef]
- Boyden, A.; Soo, V.K.; Doolan, M. The Environmental Impacts of Recycling Portable Lithium-Ion Batteries. Procedia CIRP 2016, 48, 188–193. [Google Scholar] [CrossRef] [Green Version]
- Huang, B.; Pan, Z.; Su, X.; An, L. Recycling of lithium-ion batteries: Recent advances and perspectives. J. Power Sources 2018, 399, 274–286. [Google Scholar] [CrossRef]
- Callebaut, G.; Gunnarsson, S.; Guevara, A.P.; Tufvesson, F.; Pollin, S.; der Perre, L.V.; Johansson, A.J. Massive MIMO goes Sub-GHz: Implementation and Experimental Exploration for LPWANs. arXiv 2020, arXiv:2012.01803. [Google Scholar]
- Sallum, E.; Pereira, N.; Alves, M.; Santos, M. Improving Quality-Of-Service in LoRa Low-Power Wide-Area Networks through Optimized Radio Resource Management. J. Sens. Actuator Netw. 2020, 9, 10. [Google Scholar] [CrossRef] [Green Version]
- Stusek, M.; Moltchanov, D.; Masek, P.; Hosek, J.; Andreev, S.; Koucheryavy, Y. Learning-Aided Multi-RAT Operation for Battery Lifetime Extension in LPWAN Systems. In Proceedings of the 2020 12th International Congress on Ultra Modern Telecommunications and Control Systems and Workshops (ICUMT), Brno, Czech Republic, 5–7 October 2020; pp. 26–32. [Google Scholar] [CrossRef]
- Mikhaylov, K.; Stusek, M.; Masek, P.; Petrov, V.; Petajajarvi, J.; Andreev, S.; Pokorny, J.; Hosek, J.; Pouttu, A.; Koucheryavy, Y. Multi-RAT LPWAN in Smart Cities: Trial of LoRaWAN and NB-IoT Integration. In Proceedings of the 2018 IEEE International Conference on Communications (ICC), Kansas City, MO, USA, 20–24 May 2018; pp. 1–6. [Google Scholar] [CrossRef] [Green Version]
- Tejan, P.K.; Kain, S. Smart community maintenance ecosystem with self-reporting and self-diagnostic IoT sensors. In Proceedings of the 2018 International Conference on Smart City and Emerging Technology (ICSCET), Mumbai, India, 5 January 2018; pp. 1–4. [Google Scholar] [CrossRef]
- Rady, M.; Georges, J.P.; Lepage, F. Can energy optimization lead to economic and environmental waste in LPWAN architectures? ETRI J. 2020. [Google Scholar] [CrossRef]
- Mulders, J.V.; Crul, S.; Leenders, G.; Thoen, B.; Van der Perre, L. Bringing Energy to IoT Nodes: An Unmanned Vehicle for Wireless Power Transfer. In Proceedings of the 2019 IEEE Sensors Applications Symposium (SAS), Sophia Antipolis, France, 11–13 March 2019; pp. 1–5. [Google Scholar] [CrossRef]
- Li, Y.; Liang, W.; Xu, W.; Jia, X. Data Collection of IoT Devices Using an Energy-Constrained UAV. In Proceedings of the 2020 IEEE International Parallel and Distributed Processing Symposium (IPDPS), New Orleans, LA, USA, 18–22 May 2020; pp. 644–653. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| LoRaWAN | Sigfox | NB-IoT | ||
|---|---|---|---|---|
| PHY | ||||
| Modulation scheme | CSS | D-BPSK | BPSK/QPSK (SC-FDMA) | |
| Frequency | 868 | 868 | GSM (e.g., 900) LTE (e.g., 1700) | |
| Bandwidth | 250 and 125 | 100 | 200 | |
| Transmit Power () | ISM governed: max. 14 (node) /27 (gateway) | 14/20/23 | ||
| MAC | ||||
| Protocol overhead | ||||
| Initial Access | None (ABP)/Low (OTA) | None | High | |
| Uplink Packet | 13–28 bytes | 14 bytes | IP-based (depends on higher layer protocols) | |
| Collisions | ||||
| Freq. div. | No | Yes | ||
| Space div. | Yes | Yes | n.a. (grant-based) | |
| Time div. | No | Yes | ||
| Overhearing | No | No | No (grant-based) | |
| Adaptive PHY control | Yes (ADR) | No | Yes (CE levels) | |
| Maximum payload size | ∼250 bytes | 12 bytes | 1600 bytes | |
| MKR WAN 1300 | The Things Uno | Seeeduino LoRaWAN | ST B-L072Z-LRWAN1 | |
|---|---|---|---|---|
| Host MCU | SAMD21 | ATmega32u4 | ATSAMD21 | STM32L0 |
| MCU Architecture | Arm M0+ | AVR 8 bit | Arm M0+ | Arm M0+ |
| MCU Clock speed | 48 | 16 | 48 | 32 |
| Modem | Murata CMWX1 | Microchip RN2483 | RisingHF RHF76 | Semtech SX1276 |
| Operating voltage | V | 5V | 5V | V |
| Power usage | Low | High | Medium | Low |
| Price indication | €33 | €55 | €47 | €42 |
| Non Rechargeable | Rechargeable | |||||||
|---|---|---|---|---|---|---|---|---|
| Composition | Alkaline | Lithium Thionyl Chloride | Lithium Manganese Dioxide | Lithium Iron Disulfide | Lithium Poly Carbon | Lithium Cobalt Oxide | Lithium Polymer | |
| Abreviation | ALK [50] | LTC [51] | LMD [52] | LID [53] | PC [54] | LCO [55] | LIPO [56] | |
| Volumetric energy density | Wh/L | 506 | 1080 | 683 | 562 | 532 | 602 | 309 |
| Weight energy density | Wh/kg | 176 | 480 | 323 | 300 | 300 | 217 | 185 |
| Power density | W/kg | 18 | <0.1 | 6.5 | 300 | 0.3 | 650.2 | 123 |
| Internal resistance | <250 | High | 10–70 | <350 | <1000 | ∼40 | ∼40 | |
| Nominal voltage | V | 1.5 | 3.6 | 3 | 1.5 | 3 | 3.65 | 3.7 |
| Discharge cut-off voltage | V | 0.9 | 2 | 1.5 | 0.9 | 1.5 | 2.5 | 2.75 |
| Discharge rate | - | C/10 | C/10,000 | 1 C | 1 C | C/1000 | 0.5–1 C | 1 C |
| Self discharge | %/year | 2–3 | <1 | 1 | 2 | 0.5 | 12 | 60 |
| Operating temperature | −10 to 50 | −55 to 85 | −40 to 60 | −40 to 60 | −40 to 85 | −20 to 60 | −10 to 50 | |
| Price | EUR/Wh | ∼0.1 | ∼1 | ∼0.7 | ∼0.5 | ∼1 | ∼0.3 | ∼1.8 |
| Shelf life | year | 7–10 | 10 | 10–20 | 10 | 10 | ∼10 | <5 |
| Parameter | Arm M0+ (ATSAMD21) [86] | 8-bit PIC (PIC16F1717) [87] | 16-bit PIC (PIC24FJ128GA310) [88] |
|---|---|---|---|
| BOD () | 0.132 | 0.8 | 0.07 |
| WDT () | 0.007 | 0.5 | 0.8 |
| 32 kHz RTC () | 0.056 | 1.3 | 0.4 |
| Energy Mode | Current Consumption | Capabilities (Non-Exhaustive List) |
|---|---|---|
| Energy Mode 0 | 180 / | Full capabilities. |
| Active/Run Mode | High performance CPU and with all peripherals available (if enabled) | |
| Energy Mode 1 | 45 / | CPU disabled, all peripherals available (if enabled) |
| Sleep Mode | PRS combined with DMA enables data transmission between peripherals | |
| without CPU intervention | ||
| Energy Mode 2 | 0.9 | No high frequency oscillators, which means not timers or continuous |
| Deep Sleep Mode | sampling of the ADC. RTC on a low-frequency oscillator. | |
| Low-Energy UART, I2C (slave operation), Analog Comparator, GPIO | ||
| Energy Mode 3 | 0.6 | Full RAM retention, no RTC |
| Stop Mode | Watchdog timer, I2C slave operation, GPIO, Analog Comparator | |
| Energy Mode 4 | 20 | No RAM retention, only asynchronous wake-ups possible from |
| Shutoff Mode | GPIO or reset. |
| a. Power consumption in each mode. | ||
| Mode | CPU State | Power |
| sensor off | EM2 | 5 |
| wake-on sound | EM3 | 50 |
| sample | EM1 @ 1 MHz + ADC | 1 |
| process | EM0 @ 24 MHz | 10 |
| b. Average power in (sampling and processing each take 10 ms). | ||
| Events/Hour | with Wake-on-Sound | Periodic Wake-Up |
| 3600 | 159 | 115 |
| 1200 | 86 | 115 |
| 100 | 53 | 115 |
| 10 | 50 | 115 |
| LoRaWAN [39,98] (SF7) | LoRaWAN [39,98] (SF12) | Sigfox [37] | NB-IoT [99] (PSM) | NB-IoT [99] (shutdown) | |
|---|---|---|---|---|---|
| Energy per packet | mJ | mJ | mJ | mJ | mJ |
| Duration of packet | s | s | s | s | s |
| Transmission Frequency | Average power () during one cycle | ||||
| 1/15 min | 17.0 | 254.9 | 28,797.7 | 70,908.2 | 3,639,071.5 |
| 1/hour | 8.0 | 67.5 | 7203.1 | 18,008.3 | 909,771.6 |
| 2/day | 5.2 | 10.2 | 604.8 | 1844.4 | 75,818.89 |
| 1/day | 5.1 | 7.6 | 304.9 | 1109.7 | 37,911.9 |
| 0.5 /day | 5.0 | 6.3 | 155.0 | 742.4 | 18,958.5 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Callebaut, G.; Leenders, G.; Van Mulders, J.; Ottoy, G.; De Strycker, L.; Van der Perre, L. The Art of Designing Remote IoT Devices—Technologies and Strategies for a Long Battery Life. Sensors 2021, 21, 913. https://doi.org/10.3390/s21030913
Callebaut G, Leenders G, Van Mulders J, Ottoy G, De Strycker L, Van der Perre L. The Art of Designing Remote IoT Devices—Technologies and Strategies for a Long Battery Life. Sensors. 2021; 21(3):913. https://doi.org/10.3390/s21030913
Chicago/Turabian StyleCallebaut, Gilles, Guus Leenders, Jarne Van Mulders, Geoffrey Ottoy, Lieven De Strycker, and Liesbet Van der Perre. 2021. "The Art of Designing Remote IoT Devices—Technologies and Strategies for a Long Battery Life" Sensors 21, no. 3: 913. https://doi.org/10.3390/s21030913
APA StyleCallebaut, G., Leenders, G., Van Mulders, J., Ottoy, G., De Strycker, L., & Van der Perre, L. (2021). The Art of Designing Remote IoT Devices—Technologies and Strategies for a Long Battery Life. Sensors, 21(3), 913. https://doi.org/10.3390/s21030913