1. Introduction
The preservation of cultural heritage assets is an important task of modern civilizations. It provides identity, ensuring the understanding of the past, identification with traditions and customs, and allows for the accessing of existing, destroyed, or lost heritage objects.
Tangible assets of cultural heritage include technical instruments and artifacts—we call these tech heritage (TH). If these assets are historically researched and didactically processed, they allow for insights into developments and objects that have fundamentally shaped our civilization. Without professional processing, however, these assets remain silent; especially when they are technically complex and significantly encapsulated.
There are several methods and technologies for the 3D preservation of outdoors cultural heritage (CH) objects available and well-described in the literature—a most recent review is given by [
1]. These are differentiated as active and passive sensing. Active sensors collect mostly range-based 3D data, by invasive direct measurements of mechanical systems or the operation of optical systems using triangulations, time-of-flight, or interferometry. Therefore, the active sensing technologies used so far in outdoors CH applications seem to be less suitable for the 3D preservation of TH objects.
This scenario completely changes when evaluating the methods and technologies of medical imaging. In medicine, a variety of methods for generating 3D volume data have been developed and are now widely used in medical applications to visualize the internal structures of human organisms, such as magnetic resonance imaging (MRI) (also called magnetic resonance tomography (MRT)), positron emission tomography (PET), and to an even greater extent X-ray-based computed tomography (CT). CT is nowadays used for a variety of sciences and applications beyond the medical field, such as material sciences, physics, biology, mechanical engineering, or technical applications, for the non-destructive determination of three-dimensional models of the internal structures of objects. For example, several studies in non-medical fields have been carried out by the authors of this paper and others using CT: the measurement of the properties of electrical structures [
2], the application of dimensional metrology [
3,
4,
5,
6], and the contactless and non-destructive three-dimensional digitization and conservation of cultural assets in the context of digital heritage [
7,
8,
9,
10]. These non-medical applications are drivers for CT systems with ever higher spatial resolution, from the micrometer to the nanometer range, as well as for X-ray-based CT systems with ever higher photon energies, in order to irradiate materials that absorb much more strongly than tissues, such as metals and greater radiolucent material thicknesses. In summary, using medical technologies, such as CT, extends the existing methods of active sensing for collecting 3D data inside a TH object.
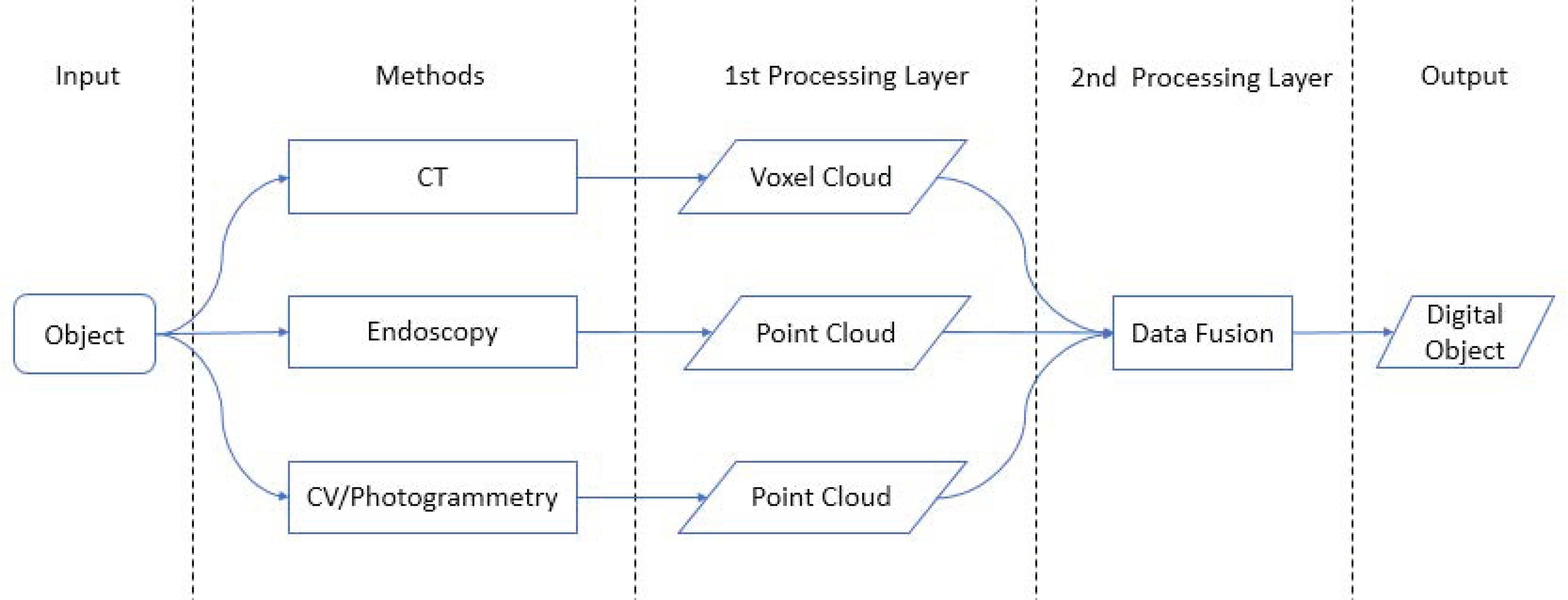
Passive sensing is image-based and uses natural light or enhanced lighting conditions. Based on the well-known methods and technologies for aligning and matching overlapping image blocks, as offered by geometric computer vision (CV) and photogrammetry, we also integrate endoscopy to collect overlapping images inside the TH objects (see
Figure 1). The steps for all three fields are: first, these images are collected with calibrated DSLR cameras and endoscopes. Second, these images are aligned by structure-from-motion (SfM) or bundle block adjustment algorithms. Third, we accomplish dense image matching (DIM) using multi-view stereo (MVS) to get colored dense point clouds in 3D. Finally, the 3D colored point clouds are filtered and meshed to obtain “watertight” models.
The last twenty years have seen important milestones passed in the processing of stereo and multi-view stereo data, likewise in geometric CV and photogrammetry. The relation between photogrammetry and CV [
11] has been considerably improved. It was proven that the projective equations of CV are identical with the collinearity equations of photogrammetry and therefore methods can be exchanged between them. Automatic image feature detection [
12,
13] provides automatic tie points for SfM (geometric CV) and bundle block adjustment (photogrammetry). In 2000 the 1st edition of a comprehensive collection of multiple view methods in CV was published [
14]. Semi-global matching (SGM) was introduced by [
15], leading to the enhanced quality of high resolution point clouds. An accurate, dense, and stereo reconstruction using SGM has been demonstrated by [
16]. A refinement of SGM is tube-based SGM, which led to the development of SURE [
17,
18], a software for dense image matching (DIM) of airborne [
19], close range [
20], and most recently space-borne high resolution optical imagery [
21]. Another refinement of the SGM algorithm is given by [
22].
Preserving tech heritage in 3D through a combination of CT, CV, endoscopy, and photogrammetry is a new and fascinating field allowing for many options in historical research, education, and AR/VR applications. At the first stage, a 3D model of an instrument—inside and outside—by a meshed and watertight point cloud is offered, which can be shared by open access (OA) with a worldwide community. Thus, any intersections can be generated, using open source (OS) software, e.g., CloudCompare, MeshLab, the Point Cloud Library, and Pointools. A further processing stage is the decomposition of the model into Constructive Solid Geometry (CSG) features, e.g., vectoral elements, which represent all the parts in a Lego-like fashion. Other benefits of a CSG description is data compression and semantic labeling, i.e., putting attributes behind every geometric element. Up till now, CSG modeling with satisfying output is accomplished only through very time-consuming manual work. In future, the methods of machine learning and deep learning may help to automate this decomposition, but this will not be reflected here. Therefore, with our research we are entering largely unexplored territory that holds the promise of many exciting developments in the years to come.
The structure is as follows: after the introductory
Section 1 we describe the novelty of this work in combining 3D models of geometric computer vision with 3D voxels of computed tomography. In
Section 2, for the first time we combine voxel clouds with point clouds to get a combined 3D model representing the interior and exterior object characteristics. Point clouds are normally fused and co-registered using the ICP algorithm, with no explicit information about their in-depth geometric qualities. We define a spatial similarity transformation embedded in a Gauss–Helmert model to estimate the variances of the unit weight and standard deviations of the combined data sets.
Section 3 describes the University of Stuttgart’s gyroscopes collection, which was launched in the 1960s and contains about 160 objects. To sustain these TH assets, the Gyrolog project started 2017, with the mission to generate digital copies—we call these “digital twins”—using CT, geometric CV, and photogrammetry. In addition, the potential of endoscopy was to be explored.
Section 4 deals with 2D photography and post-processing for easy object documentation and digital archiving. In
Section 5 we outline the details of collecting 3D CT scans with denoising characteristics and 3D colored point clouds of CV/photogrammetry and endoscopy to finally create a 3D digital twin. The basic workflows and experimental results are presented.
Section 6 contains the results of the 3D reconstructions of three different gyroscopes, including some historic research: (1) the Machine of Bohnenberger (1810), which is regarded as the very first gyroscope; (2) a directional gyroscope used for aircrafts in World War II (1940s); and (3) a gyroscope embedded in the inertial platform of the Lockheed F104G Starfighter (1960s). Moreover, two further examples demonstrate our capability to create 3D digital twins of the Stuttgart gyroscope collection. Thereafter their curation and sustainability in OA environments are outlined in
Section 7. Finally, the conclusions and an outlook for future work complete this article, besides the references and list of abbreviations.
2. Merging 2.5D and 3D Data and Texturing—Making 3D Models Alive
In order to generate digital twins of tech heritage objects, such as the very first gyroscope invented by J.G.F. Bohnenberger in 1810 (see
Figure 2), we decided on a combination of CT, endoscopy, and CV/photogrammetry. If we were to use CV/photogrammetry only, we would get the colored 3D hull of an object. Meshing the 3D points along the hull by 2D triangles and texturing it appropriately yields a 2.5D digital model. The definition of 2.5D is often used, when combing 3D coordinates with 2D topological elements, here triangles. As will be shown later, sensor fusion for this combination is only possible with endoscopy and CV/photogrammetry, as both generate optical image blocks to be processed by SfM and DIM in one processing step. This finally leads to consistent alignments and co-registered colored 3D point clouds.
The overall workflow of our novel approach of combining point clouds and voxel clouds is given by
Figure 3. In summary, we are using two layers of data processing: the first layer delivers voxel clouds and point clouds and the second layer performs the data fusion of the CT, CV/photogrammetry, and endoscopy data.
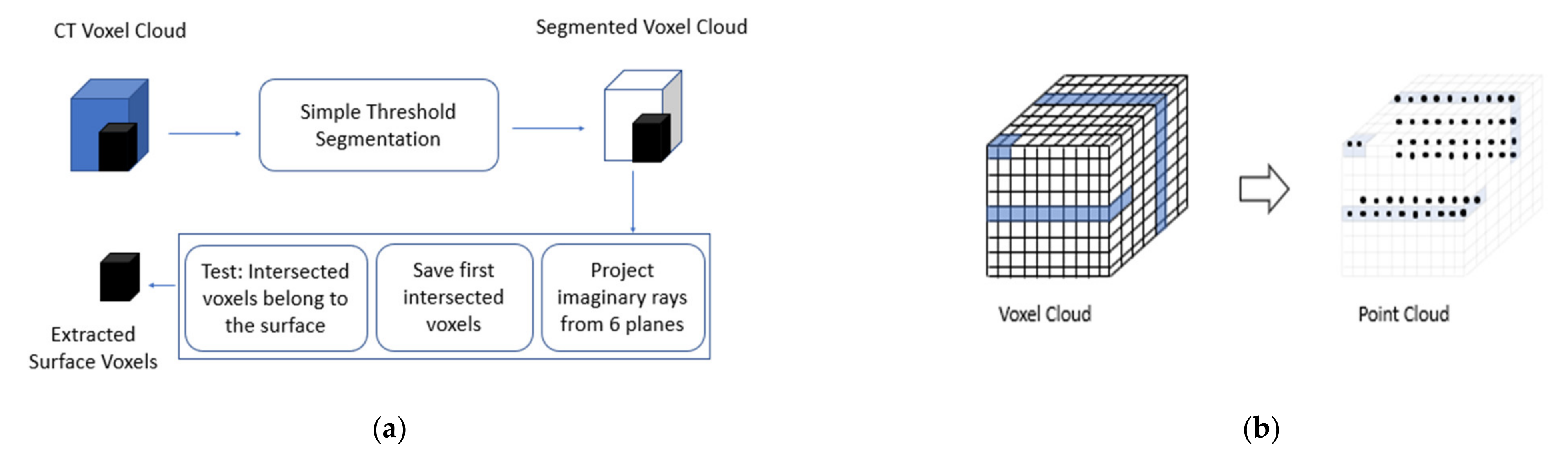
The co-registration of CV/photogrammetry point clouds with 3D CT voxel clouds is only possible by data fusion using registration algorithms, such as the rigid body transformation or a spatial similarity transformation. Two intermediate steps are necessary: as we have CV/photogrammetry hull points we first have to find hull voxels. This is done by segmentation and ray tracing (see
Figure 4a). The second step is a transformation of the processed voxel cloud to a point cloud (see
Figure 4b). We have proven the two-step voxel-to-point cloud processing in [
23] when coloring voxel clouds using photogrammetric hull textures. For the merging of two point clouds, the iterative closest point (ICP) algorithm [
24] implemented in Open Source point cloud libraries, such as CloudCompare, MeshLab, PCL, and Open3D, is considered to be the classic approach. However, its disadvantage is that it is missing an in-depth quality measure for the registration. Thus, we define a seven parameter spatial similarity transformation embedded in an adjustment model, not only to co-register the 3D CT voxel clouds with the 3D point clouds of CV/photogrammetry, but also to achieve quality measures for the registration in the form of unit weight variances and standard deviations.
Starting with the seven parameter transformation with at least three control points, we get:
where
X is the (3 × 1)
u vector of the target coordinates of
u control points,
Xo is the (3 × 1)
u vector of the three translation parameters (
Xo,
Yo,
Zo),
µ is the scale,
R is the (3 × 3)
u rotation matrix depending on the unknown rotation angles
α,
β,
γ, and
x is the (3 × 1)
u vector of the local
u control point coordinates. This non-linear transformation is linearized considering only differential changes in the three translations, three rotations, and one scale, and therefore replaces Equation (1) by,
where
S is the (3 × 7)
u similarity transformation matrix resulting from the linearization process of Equation (1), and,
representing the seven unknown registration parameters. In order to estimate the precision of the registration, a least-squares Gauss–Helmert model [
25] must be solved, for
u ≥ 3 and
B =
S, leading to,
Solving Equation (4) with respect to
v,
x, and the Lagrangian
λ, we use Gaussian error propagation for getting the desired dispersion matrices. With
D(w) =
σ2AP−1A’ the precision of the registration parameters is propagated to,
D(x) contains the variances and covariances along its main diagonal and off-diagonals, which can be used to propagate any precision of the individual in-situ data collection method and finally assess the quality of the registration.
Let
V(
O) be the set of
m voxels of a 3D CT scan and
P(
O) be the set of
n points describing the object hull (3D) of CV/photogrammetry. First of all the ground sampling distance (GSD) or object sampling distance (OSD) of the CT scan should be similar to the CV/photogrammetry OSD. Then the CT hull voxels are identified and the whole voxel cloud is transformed to a point cloud, i.e.,
V(
O) ->
VP(
O), representing a similar data structure of
P(
O) (see
Figure 4). The next step is to choose
u > 3 homologue points for the co-registration of
VP(
O) with
P(
O). The OSD of CV/photogrammetry for our applications is around 0.05–0.09 mm, and the CT scan OSD is about 0.06 mm. Thus the OSDs are similar but CT provides larger data volumes.
For the example in
Figure 5, the CT scan of original resolution is about 86 GB and the CV/photogrammetry point cloud is about 425 MB. The down-sampling of CT by a factor of four reduces the data volume to 1.34 GB, and also the noise and artifacts. After an initial application of the ICP algorithm with a threshold of 0.05 mm using OS libraries, we chose
u = 4 and
u = 10 joint corners (control points) for the seven parameter transformations of the merged point clouds, finally obtaining improved registration results with the following quality measures for precision:
For
u = 4 the estimated standard deviation of unit weight σ = 1.38, the estimated precision of the CT scans σ
CT = 0.10 mm, and the estimated precision of CV/Photogrammetry σ
CV = 0.08mm, and for
u = 10 these results are σ = 1.07, σ
CT = 0.08 mm, and σ
CV = 0.06 mm. The more control points that are used, the better the precision can be estimated. These figures demonstrate that CV/photogrammetry 3D point clouds are more precise than down-sampled CT 3D volume data, and efforts are to be made to reduce noise and artifacts in CT scans (see
Section 5.1) in order for them to arrive at the same level of precision. The results of our combined models and their corresponding precision values are given in
Section 6. It is noted here that the data fusion of CT and CV/photogrammetry can provide digital twins with a precision of 0.1 mm.
3. The University of Stuttgart’s Gyroscopes Collection—The Gyrolog Project
Based on J.G.F. Bohnenberger’s 1810 invention of the gimbal mounted gyro, also called the Machine of Bohnenberger, and the work continued by J.B.L. Foucault to prove the Earth’s rotation, the theory of the gyroscope became a supreme discipline of physics during the 19th century [
26,
27]. The first technical applications followed at the beginning of the 20th century. Scientists like F. Klein, A. Sommerfeld, and M. Schuler at the University of Goettingen, and R. Grammel at the Technical University of Stuttgart, as well as entrepreneurs like H. Anschuetz-Kaempfe, Kiel, and W. v. Siemens, Berlin, made Germany a world leader in gyroscopes for flight and ship control, both scientifically and industrially. After World War II, K. Magnus, M. Schuler’s student and R. Grammel’s successor in Stuttgart, as well as the companies Anschuetz (Kiel), Bodenseewerk (Ueberlingen), C. Plath (Hamburg), Litef (Freiburg), and Teldix (Heidelberg) resumed this tradition [
28].
Understanding the movement of the gimbal-mounted gyro and its derivatives is considered to be particularly challenging, both physically and mathematically [
29]. To illustrate the teaching and research of K. Magnus, he and his assistants H. Sorg and J. Steinwand began in the 1960s to assemble a collection of gyroscopes at the Institute of Mechanics of the Faculty of Mechanical Engineering, University of Stuttgart. In 2005, the responsibility for this collection passed on to J.F. Wagner, of the Faculty of Aerospace Engineering and Geodesy at this University.
In addition to illustrating how gyroscopes and inertial navigation systems work, the collection also reflects the historical development of these instruments. It contains approximately 160 objects and includes most of the known types of gyro instruments for flight, land vehicle, and ship navigation (gyro compass, directional gyro, gyro horizon, P and I rate gyros, etc.) as well as various types of accelerometers. There are also complete inertial platforms. Components of the devices such as rotors, slip rings, and rotary encoders, as well as rotary tables for testing inertial sensors, are also available. Many exhibits were taken from decommissioned aircrafts and ships. Some of them have been cut open or partly dismantled, and some are still operational. They are mostly between 40 and 70 years old. This records the development of gyroscopic instruments, especially the work of H. Anschuetz-Kaempfe, Kiel, and E. Sperry, New York, up to the 1970s. The collection is unique in the higher education sector, at least in Germany, and is also complementary to other important collections of this type not only in Germany but worldwide. Some selected objects are shown in
Figure 6.
In 2017, the German Federal Ministry of Education and Research (BMBF) awarded a grant for a project to create 3D digitization of this collection. The project is called Gyrolog (from the Greek γύρος, rotation, and λόγος, teaching). Its aim is to use digital methods (see
Section 4,
Section 5 and
Section 6) to free the inconspicuous, yet highly complex objects, of today’s ubiquitous gyro technology from their black box in order to open this technology for research in the history of technology, technology didactics, museum education, etc., as well as for teaching in schools, universities, and institutions of further education. Digitization makes this technology understandable and in the truest sense of the word “virtually” and enables further research by the disciplines mentioned. The project was successfully completed at the end of 2020.
Furthermore, the virtual character of the digitized collection allows for the option of reuniting the collection with its historically formed subsidiaries at the Technical University of Munich, Germany, and the Johannes Kepler University of Linz, Austria. Additional instruments, such as an original copy of the Machine of Bohnenberger, which is described in more detail in
Section 6.1, can also be added virtually.
4. Two-Dimensional Data Collections and Postprocessing
Meanwhile, the digitized collection of gyro instruments can easily be accessed by 2D pictures. This human–computer interaction interface provides first details of these highly complex and fascinating objects.
Accordingly, the intention behind the 2D digitization was to provide the user with as many views, as well as details, of the gyroscopic instruments as possible. However, compared to the newly created 3D objects, 2D pictures always provide limited object details depending on the field-of-view. The Gyrolog 2D setup is based upon photographic studio facilities, with a professional background and lighting. A light crème color was chosen as a background to contrast with the mostly dark, black, or metallic objects.
For the 2D data collection process a standardized procedure was created that included a fast response and digitization time as well as an elaborate way of handling the objects in order to minimize the impact of the data collection. First, the object is placed on the 2D set-up for the so-called characteristic view, which was developed together with a professional photographer. This characteristic view will guarantee a first impression with all the relevant information contained within the gyro instrument in one view, if possible, as seen in
Figure 7a.
Then the instrument is rotated to display the front of the object. This process includes some challenges with regard to definition. Parts of the gyro collection are aircraft instruments that were built for and used in aircraft cockpits. Here the front view definition is quite easy. Other parts of the collection were rather more challenging but could also be defined together with our collection experts (see
Figure 7b). Then the further data collection process was similarly executed as the object was carefully rotated in predefined ways: to display the left view, the rear view, and the right view. For the bottom and upward view, the instrument was cautiously turned. Furthermore, caging devices were used to minimize movements. These were individual fixtures that were partly 3D printed to fit to some of the objects within the collection (see also
Figure 7a). In a last step, details such as type labels were digitized for a close-up view. With this data collection process the Gyrolog project ensured a detailed set of 2D pictures from every possible view of the individual gyro instruments.
This 2D dataset was also post-processed after a standardized sorting procedure. The basis for this was laid out during the digitization process. To distinguish between the different views, the 2D digitization photographer used different colored labels while digitizing the objects to support the post processing. The different labels were color-coded as well as labeled always in the same order: characteristic view, front view, and follow-up views. During the post processing the pictures were sorted into the different views for each instrument.
For every object, the best pictures are chosen and are available on the viewing platform Goobi. Goobi [
30] is an open source, web-based software that is used by the University of Stuttgart’s library, a Gyrolog project cooperation partner, to ensure the sustainability of the digital gyroscopes collection (see
Section 7).
5. Three-Dimensional Data Collections by Means of Computed Tomography, Computer Vision, and Endoscopy
With emerging technologies in the fields of data capture, data processing, and data visualization, three-dimensional object preservations have become state-of-the art practice for cultural heritage and also for tech heritage assets. One efficient and robust technology is photogrammetry, using horizontally and vertically overlapping photos to generate 3D reconstructions of surfaces and hulls. For a long time, photogrammetry served 3D mapping by means of bundle block adjustments and orthophotos. With the invention of DIM, photogrammetry underwent a renaissance and is equivalent and comparable to geometric CV. The photogrammetric bundle block adjustment is the pose estimation of computer vision, also called structure-from-motion (SfM). Large image blocks are automatically processed by SfM and DIM algorithms in one software package, delivering finally very dense colored point clouds which can be meshed for watertight models, also called virtual reality (VR) models or digital twins (DT).
Endoscopy is the use of imaging camera systems with huge enlargements but tiny fields-of-views (FoVs). Therefore, it is tricky to collect sufficiently overlapping image blocks through controlled camera movements along horizontal and vertical axes only. An endoscopic image block can be processed with the same workflow of geometric CV, moreover, it can directly be integrated into the CV image blocks which simplifies the point cloud registrations.
CT is a non-invasive imaging technology which directly provides 3D volumetric models or volume elements, in short voxels. As mentioned previously, the down-sampling of huge voxel files to reasonable data volumes is quite a challenge, which has to be overcome for the joint registration process.
The complete 3D contents of our gyroscopes’ DTs are obtained by an integration of CT voxel clouds with CV/photogrammetry and endoscopy point clouds. CT data and CV/photogrammetry point clouds are co-registered using the similarity transformation as described in
Section 2. If endoscopic image blocks are simultaneously processed with the exterior image blocks, then they are automatically co-registered. If not, another similarity transformation ought to be accomplished.
5.1. Computed Tomography 3D Data Collection
In comparison to medical CT machines, industrial machines are more powerful and can easily penetrate through the different alloys of metals. In this work, an X-ray-based CT scanner with a resolution in the single digit micrometer range and with a photon energy up to 225 KeV is used, see
Figure 8.
It is our concern to capture the interior of these historical gyroscopes in 3D without disassembling or destroying them. As is usual in CT systems, the 3D volume data is generated by rotating the sample placed on a turntable and taking several thousand X-ray images during the rotation; see
Figure 8. From these projections the most widely used algorithm for CT reconstruction, the so-called filtered back projection (FBP) [
3], is used. In selected cases, the maximum-likelihood expectation-maximization (MLEM) reconstruction algorithm is applied with a significantly higher computation time in order to generate 3D volume data of high quality in terms of noise of the objects [
31].
There are several noise sources caused by artifacts in the 3D volume data. If the imaged gyroscopes are difficult to penetrate with X-rays due to their size and associated metal content, the projections are contaminated by massive Poisson noise.
To tackle this problem, we have applied several denoising techniques to the gyroscope samples. In order to show the results of the denoising, the X-ray images were taken with high current and acceleration voltage (
Table 1) as a ground truth and later we simulated the strong Poisson noise over the scanned projections, where the approximate number of photons was about 500 per detector pixels.
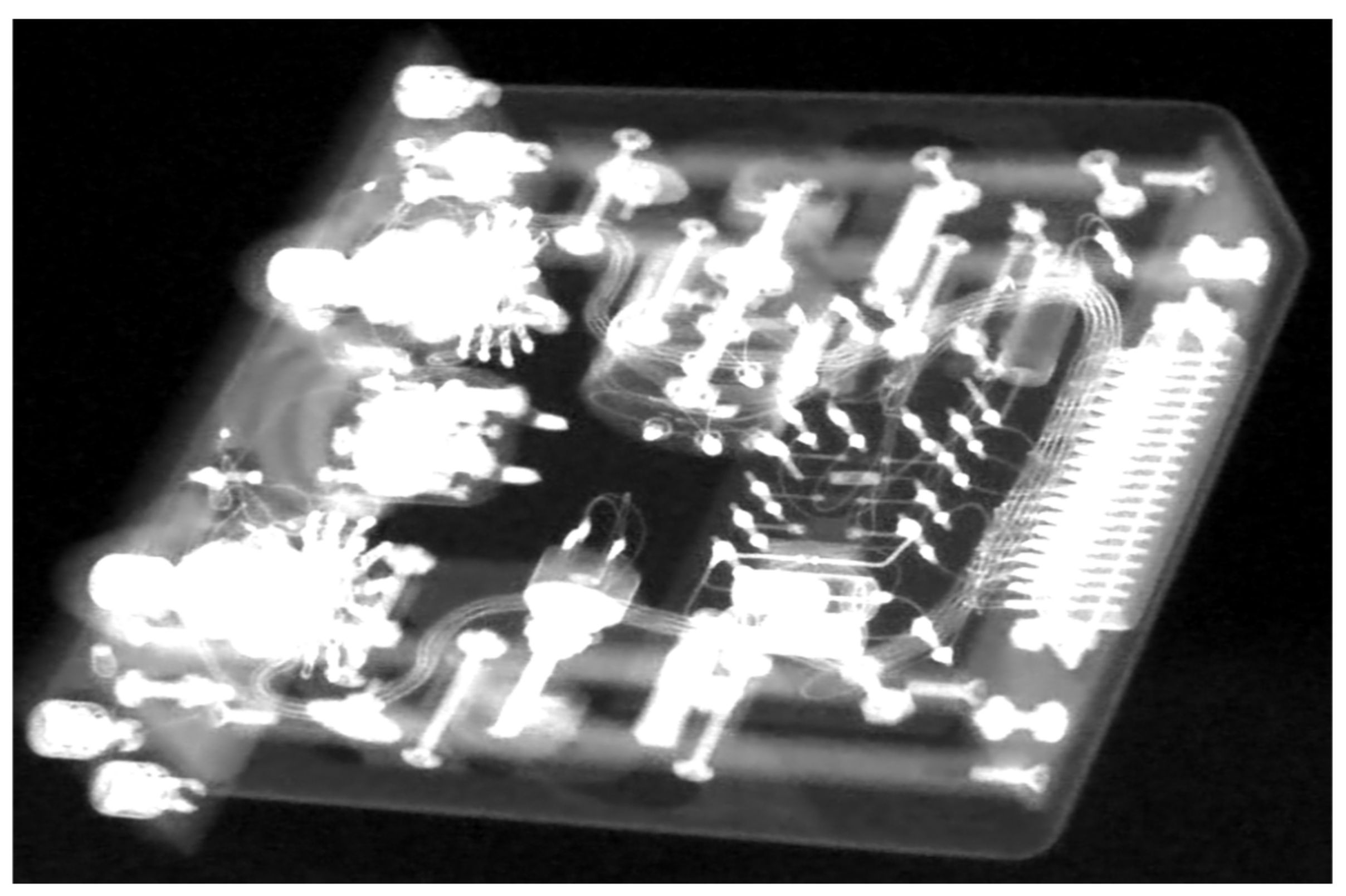
In order to demonstrate this behavior, the target object KH-09-09 was chosen because the object has a massive, closed metal box structure and a large number of small features consisting of mechanical and electrical structures, which can be seen in the X-ray projection image in
Figure 9.
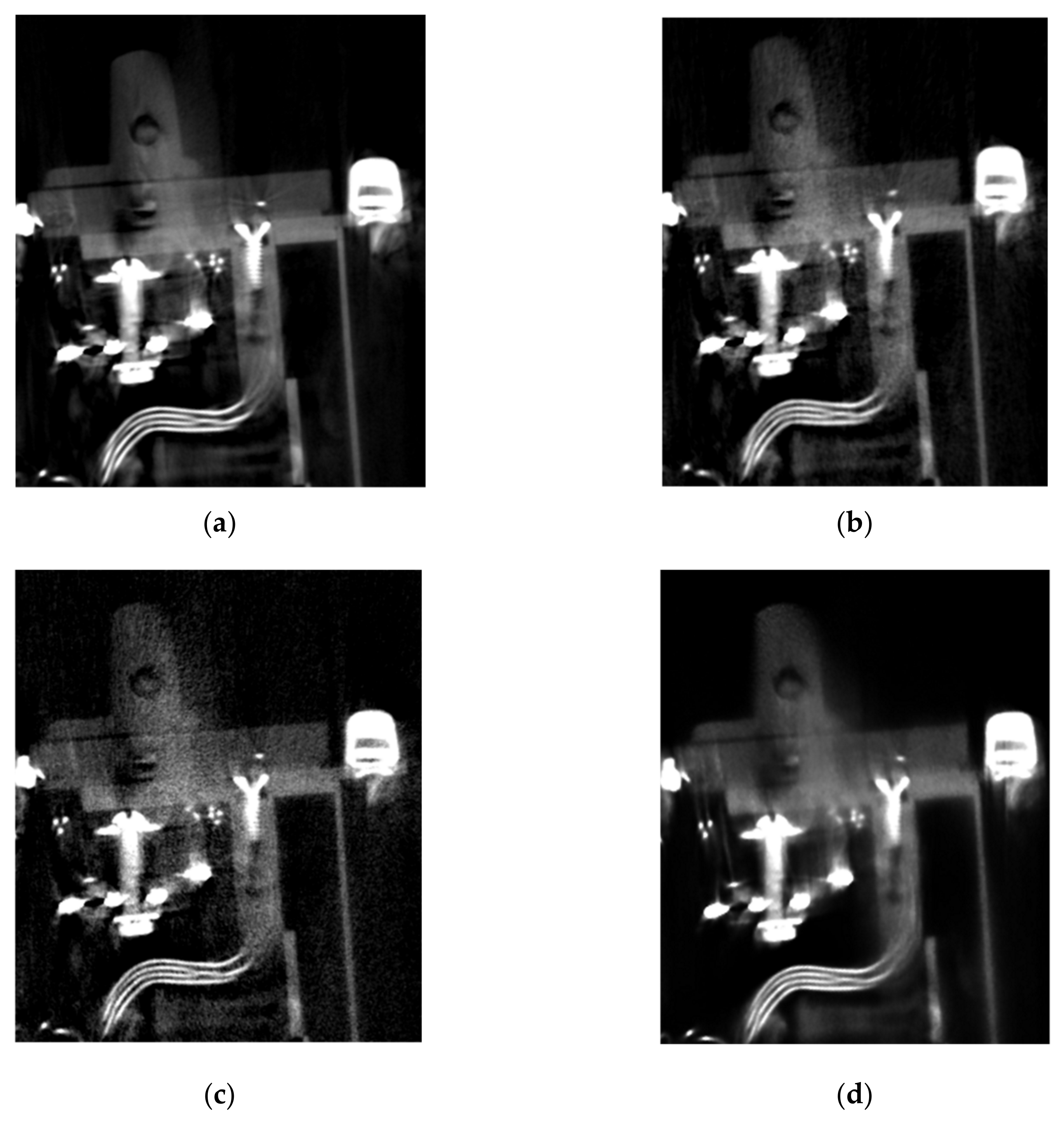
Figure 9 shows that the noise is distributed over the entire projection and thus distorts the fine structure of the image. There are two methods that we have used to achieve noise-reduced projections that contribute to the final reconstructed volume. The first denoising method is based on a fully convolutional neural network (CNN), as proposed in [
32]. The authors clearly show the benefit of the CNN for the presence of high Poisson noise, as is usually the case in CT, over the best denoising techniques available, with high number of photons and lower Poisson noise. The recently published CNN uses 20 connected layers, with 18 of them using Rectified Linear Unit (ReLU) nonlinearity and 2 of them using linear activation function. The architecture, presented in
Figure 10, utilizes 64 kernels with size 3 × 3 to convolve on each layer. The network is trained on real X-ray projections with simulated Poisson noise. The network learns the unknown denoising function by training with known data sets. The result of the CNN is shown in
Figure 11.
For the MLEM reconstruction we used our implementation combining the penalty which controls the total variation of the calculated volume at each iteration [
31,
33,
34], including a regularization parameter
β. The scanned specimen KH-09-09 was reconstructed with the regularization parameter
β equal to 1 × 10
−2 with a total number of 50 iterations. In the cases considered, the MLEM algorithm required about 50 iterations to reconstruct all features of the reconstructed volume. If the signal-to-noise ratio of the projections is low, the number of iterations should exceed 50. However, the MLEM algorithm has a computing time of more than 300 h on a powerful computer with 8 GPUs for the resolution of the detector used here for the projection images of 2300 × 3200 pixels. This is due to the large number of forward and backward projections. In order to reduce the computing time for the reconstruction significantly by a factor of 50 and still achieve high-quality volume data sets with noise reduction, denoised X-ray projections using the CNN architecture of
Figure 10 were reconstructed using the FBP. For the CNN network training, a ground truth of the original high-dose X-ray images and reconstructed 3D volume data sets were generated using FBP. A denoised projection is shown in
Figure 11. As can be seen from
Figure 12, the results obtained from the MLEM reconstruction of the noise projections and the FBP of high-dose projections are similar, and in some regions MLEM produces better results, although it is very time consuming. Denoising images with the CNN algorithm helps to remove shot noise for high photon counts.
Thus, in comparison to the FBP of noisy projections, the FBP of denoised projections shows better overall results. The noise error for both methods can be calculated assuming the FBP of the original projections without noise as a ground truth. Thus, standard metrics such as the peak-to-signal-noise-ratio, root-mean-squared error (the standard deviation), and the signal-to-noise-ratio can be used.
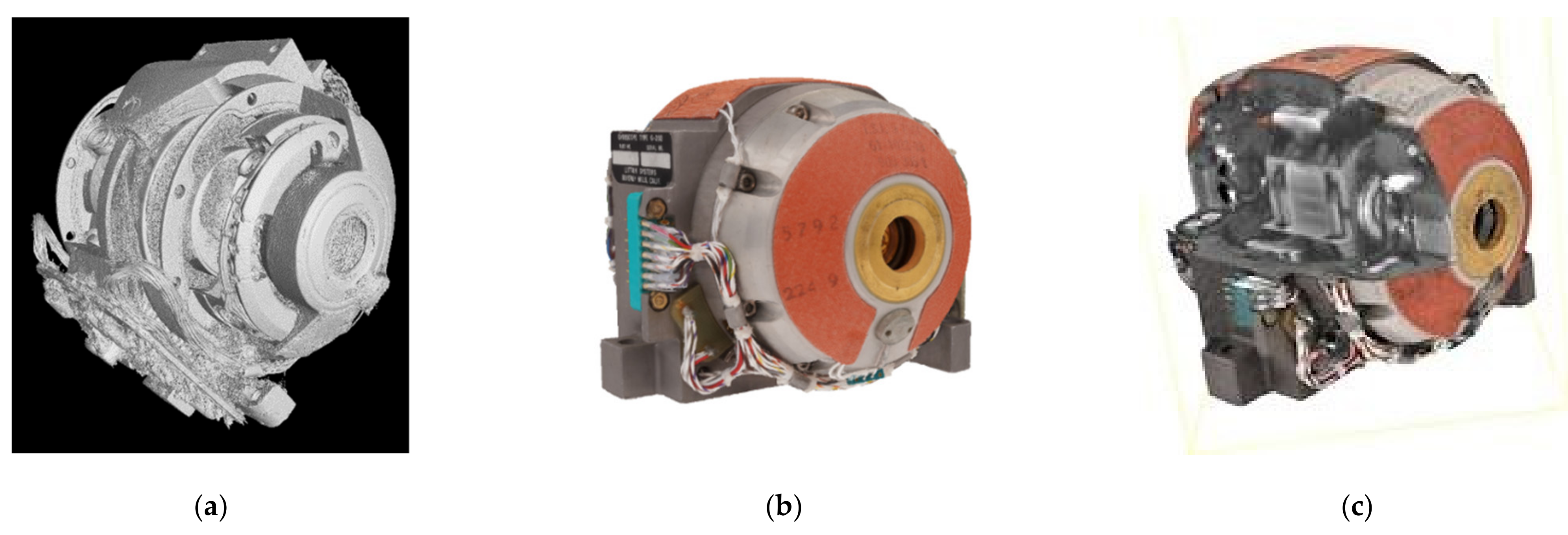
For the object G200, we have generated the iso-surfaces for both, the denoising technique of the CNN architecture of
Figure 10 and the iterative reconstruction algorithm MLEM. Compared to the first experiment, the Poisson noise will not be added to the projections. Thus, the reconstructed object will suffer from beam hardening, scattering artefacts, and shot noise. The scan parameters for the G200 specimen are given in
Table 2.
Both the outer and inner structures of the G200 are complex. On the surface there are several cables and pins which cause an increase in streak artefacts as the walls of the object are thick and difficult to penetrate by X-rays, and are made of different metal alloys such as iron, copper, and aluminum. The main goal before scanning was to use a high level of energy and metal filters to harden the X-ray beam and prevent highly visible artefacts arising from the polychromatic nature of the source. Therefore, a copper filter with a thickness of 4.5 mm was used to reduce the beam hardening artefacts and exposure time of 1.4 s was used in order to receive more photons on the detector. The surface renderings [
35] and iso-surfaces of the G200 object are depicted in
Figure 13. As is obvious, the reconstructed volume based on the FBP has severe artefacts both on the outer and inner surface.
Figure 14 shows the difference in the iso-surfaces generated from the reconstructed volume from the denoised projections calculated by the CNN. The noise and metal artefacts are significantly reduced in comparison to
Figure 13, where the denoising technique was not applied.
In comparison to
Figure 13,
Figure 15a has been reconstructed by down-sampling the projections by a factor of four. The quality of the iso-surface is further significantly improved due to the increased signal-to-noise-ratio produced by the down-sampling process in each dimension. This factor of four results in an increase in the number of photons of 64 per voxel in the 3D volume, which enhances the signal-to-noise-ratio in dB by a factor of eight, which is also a reason for the overall improvement in quality of the iso-surface view in
Figure 15b compared to
Figure 14. The reduction of the spatial resolution by down-sampling is no limitation in the context of the CT images considered here, since voxel sizes after down-sampling by a factor of four are still in an acceptable range below 250 µm, which allows a sufficient resolution for the model computed by the data fusion of CT and CV/photogrammetry data. This resolution is no limitation for the use of the data to visualize the objects including their internal structures in the context of digital heritage. The denoised projections based on the FBP reconstruction of
Figure 15b show the best overall results of all the considered cases. Obviously, based on the iso-surface, we can accurately differentiate the structure of the Regions-of-Interest (RoI) indicated by the square and circle. Both are parts of the electronic components and the rotor shape, respectively.
Based on the methods described above, 3D models of the gyroscopes in the collection were generated. As an example, parts of the Machine of Bohnenberger (see
Section 6.1) are reconstructed and shown in
Figure 16. The structure of the inner rod can be clearly seen in a cross-sectional image of the 3D volume data set in
Figure 16b. In addition, a further segmentation with a predefined material threshold results in an iso-image of the entire surface of the gyroscopic gimbal (see
Figure 16c).
5.2. Geometric Computer Vision and Photogrammetric 3D Data Collection
The principle of three-dimensional (3D) point reconstruction from imagery is called triangulation (see
Figure 17). An object is captured in at least two different photos and the corresponding image point coordinates of p
1 and p
2 are measured. With additional camera orientation information for O
1 and O
2 (image poses) the 3D corresponding point P can be calculated by the forward intersection.
The 2D–3D correspondences can be either expressed by the collinearity equations in photogrammetry:
or as the projective equation in computer vision:
The notation of CV can be abbreviated as
where
is the calibrated camera matrix.
In practice, the CV/photogrammetry workflow is split into several steps [
13,
14,
16,
18,
20], as shown in
Figure 18a. First of all, we work with calibrated camera systems, no matter if we use a DSLR camera, an “off the shelf” camera, or cell phone cameras. Camera calibration has been an issue for photogrammetry for about 100 year, with very precise calibrations for close range applications proposed in the 1960s. In this project we investigated the performance of camera calibration for four camera systems: the Gyrolog project camera Sony α7R II, a Leica Q, an Apple iPhone 7Plus, and a Samsung Note 8 [
36]. When extending the ideal lens characteristics with distortion, the collinearity Equation (6) are reformulated as:
Here
and
are the correction terms for the image coordinates,
are the components of the rotation matrix
R. With regards to camera distortion, various models are based on either the mathematical principle, the physical principle, or the mixed principle. Among many, the classical Brown model and its variants are most widely used [
37]. It classifies the distortion into radial distortion ∆
r and tangential distortion ∆
t.
In the Brown model, the radial distortion is modeled by the three parameters
K1,
K2, and
K3, and
P1 and
P2 are tangential distortion parameters. Furthermore,
:
Various methods based on the geometrical relationship are put forward, with regards to calibration scenes, calibration models, and estimation processes. For this work, experiments are mainly dependent on the Matlab® Calibration Toolbox, which uses a planar chessboard.
The CV/photogrammetry data acquisition process is on display in
Figure 18. First, we start with camera calibration. An example of the calibrated focal length (pixel) in x direction for the DSLR Sony α7R II is shown in
Figure 19. For the four calibrated cameras, the Gaussian fitting standard deviations of the calibrated focal length are shown in
Figure 20.
After the camera calibration, the data acquisition of the gyroscope objects begins. The object to be digitized is placed on a turntable under an appropriate lighting configuration, and the camera is fixed in a suitable position to take pictures, while the turntable is rotated at a well-defined speed (see
Figure 18b). With 500 to 800 images from all views in horizontal and vertical modes, and after estimating the camera pose using SfM, a dense point cloud can be calculated by DIM for further 3D modeling processes or VR/AR (virtual and augmented reality) animation. When the calculated 3D model is not complete, most probably due to the lack of information from invisible perspectives, additional images need to be taken and the corresponding point clouds will be integrated with the previous ones to complete the model. This process is called point cloud registration and is part of the process shown in
Figure 18a. A first successful test coloring 3D CT scan with photo textures is given by [
37].
5.3. Endoscopy in 3D
An endoscope is an illuminated optical, typically slender, and tubular instrument. The lens projects a real-life scene image onto the first focal plane, which is then transmitted by the reversal system to the final focal plane. At the eyepiece, the image is projected onto the file by a camera lens. An example of an endoscope can be seen in
Figure 21. Among all steps, the proper acquisition of data delivers the biggest difference in comparison to normal camera applications. In addition to the visual effects of an endoscope, more factors should be taken into account, such as accuracy, image quality, appropriate image blocks, and many more.
In traditional 3D reconstructions within CV and photogrammetry, the overlap between neighboring images should be over 80%, due to imaging distance and resolution. A DSLR or off the shelf camera fulfills this requirement without much effort, however for an endoscope, the situation is quite different (see
Figure 22).
Suppose the imaging distance is d, the coverage of the object space can be calculated via
In our case, the viewing angle is 75° and the imaging distance ranges from 5–15 mm. Therefore l can be determined from 8–23 mm. If we need an 80% overlap between the neighboring images, the movement of the tip should be 1.6–4.6 mm, which is extremely difficult to accomplish in practice while operating the endoscope to collect image blocks.
Due to the challenging imaging characteristics stated above, a suitable endoscope type should be chosen to ensure invasive possibility and sufficient image quality. In addition, using images only as an input for pose estimation requires suitable image configurations, especially for the overlap between neighboring images. The endoscope holder can be either mechanical, which gives less automation, or a robotized device (which is normally more expensive). Since highly precise movement control is hard to achieve in practice, a streaming video can be used in the place of taking still images. In practice, though video frames deliver lower resolution than endoscopic still images, highly overlapped extracted frames can make the task of image alignment much easier. Even with streaming video as input for 3D reconstruction, there are still several necessary precautions that should be undertaken.
Therefore, instead of using free hand movements, a more stable solution is proposed using a self-designed gimbal. This fixture has four degrees of freedom and the whole system consists of several parts: for horizontal movement, a cross slide is used as the base, and another single slide is attached via a 3D-printed 90 degree adapter with the cross slide. In addition, a ball head is fixed for the rotation movement. With the assistance of this system, it is possible to use screws to calmly move the endoscope precisely to create enough overlap between the images. The endoscope is thus able to move forward and backward, left and right, up and down, and also laterally.
The movement of the gimbal-assisted endoscope is shown in
Figure 23. Here a total of about 200 overlapping endoscopic images have been processed to deliver a colored point cloud (the software used for SfM and DIM is RealityCapture).
Finally a comparison of the 3D meshes generated by endoscopic and photogrammetric image blocks can be accomplished (
Figure 23b,c). Due to the enlargements of the endoscopic camera systems more details can be resolved than with regular DSLR or off-the shelf cameras, which might be important for the historical research of a gyro system. Working with endoscopic image blocks is a challenge. With the self-designed mechanical gimbal the generation of densely colored point clouds has been proven to be feasible. Further experiments will follow that explore the full potential of a multi-view stereo of large endoscopic image blocks.
7. Curation of Gyrolog and Open Access
Stable long-term accessibility of both the digitized objects as well as their pertinent metadata are decisive prerequisites for the sustained usefulness of all digitization efforts—otherwise invisible objects would merely be replaced by hidden or, even worse, lost digital data. In the Gyrolog project, sustainable data curation rests on four pillars addressing the technical and the formal aspects, as well as the administrative aspects, of longtime accessibility.
First of all, the Gyrolog project maintains a strategic partnership with the university library to grant stable availability of the digitized objects. This institution has already accumulated considerable expertise with the 2D digitization of books, architectural drawings, maps, and the like. The library presents its digitized resources via the viewing platform Goobi [
30]. Goobi is an OS web-based software providing both the front-end viewer as well as the back-end digitization management system. In order to present the Gyrolog data, the viewer has recently been expanded to include 3D representations (see
Figure 30).
It uses glTF data format for 3D graphics output, whereas *.obj files are used in Goobi’s internal workflow. The graphics language Transmission Format (glTF) was developed by the Khronos Group 3D Formats Working Group and minimizes both the size of the 3D objects and the runtime needed to unpack the objects. A difficulty that occurred during the implementation points to a characteristic dilemma of digitization: digitalized objects become unmanageable if they are too detailed because data files will become too big for comfortable consultation.
The huge
*.obj files are significantly compressed when being turned into
*.gltf files, but in most cases additional compression via the open source compression library Draco has proven indispensable to ensure a smart user experience.
Table 5 displays the file sizes of the specified Gyrolog objects presented in this paper. Thus, the
gltf/Draco format is recommended for the 3D data sharing of our Gyrolog 3D digital twins.
Gyrolog is the pioneering project for Goobi’s enhanced functionality and it is expected that several other university libraries will follow. Contrary to museums, university collections in Germany usually have no permanent professional IT personnel of their own and often are an institutional subunit within the local university library.
In contrast, Goobi’s curated data workflow allows for both 2D and 3D representations including the pertinent metadata, and Gyrolog’s massive amount of research data is hosted by DaRUS, the University of Stuttgart’s data repository for long-time data storage and accessibility. Via DaRUS, which forms the second pillar for Gyrolog’s longevity, all available 2D data as well as the CT and CV/photogrammetry data will remain accessible for at least ten years. This would enable researchers in the future to reprocess point clouds, e.g., with novel algorithms. The file system strictly refers to the objects’ inventory numbers and allows for the unambiguous attribution of every data set to the original object. This is all the more important as the data comes from many different sources and is in different formats. The inventory thus forms the data hub of Gyrolog’s metadata stock, the third pillar of long-term searchability. Apart from the images’ pertinent technical metadata, it contains semantic metadata providing information on the respective object’s manufacturer, its life cycle, and many more aspects. Curating the data comprehends the development of controlled vocabulary—for example the common labeling as “gyro” obviously is no help for the differentiation of the objects in the collection and a more finely tuned classification system had to be developed. This was done in cooperation with the Deutsches Museum at Munich, another facility holding a major collection of gyros in Germany. The unambiguous identification of manufacturers, corporations, and scientists/inventors is achieved by reference to the Integrated Authority File (in German, Gemeinsame Normdatei, GND) [
54]. Conceptual conformity with the CIDOC Conceptual Reference Model and metadata format interoperability with major web portals such as Europeana (via the Deutsche Digitale Bibliothek to which Goobi exports data routinely) allow for maximum accessibility to Gyrolog’s digital data.
Accessibility, finally, refers not only to formal issues such as controlled vocabulary and technical aspects such as longtime data storage, but also to legality. Here, open access (OA) is the fourth pillar of Gyrolog’s sustainable data curation. All Gyrolog data and metadata are shared under the creative commons license CC-BY-SA. Open access was not only a formal requirement for the grant but is also requisite for the intended broad use of the digital twins in teaching and research, for example in the history of technology or for visualization purposes in courses on mechanics. Moreover, crowdsourcing has become a substantial human resources supply in developing cultural heritage [
55]. There are so many knowledgeable gatherers and enthusiasts of gyro instruments whose expertise might prove valuable in filling the gaps in our knowledge of our objects and of gyro history more generally. To get to know these experts and to encourage them to contribute to Gyrolog’s semantic metadata is an exciting task that is only just beginning as we approach the termination of the proper digitization process.
8. Conclusions and Outlook
This paper has demonstrated that the 2D, 2.5D, and 3D digitization of tech heritage objects is a challenge that can be mastered through the combining of different technologies. For our application, in order to sustain the gyroscope collection of the University of Stuttgart, we used computed tomography, geometric computer vision, endoscopy, and photogrammetry. First, all of the objects were 2D photographed and labeled, for archival purposes. The real challenge lay in the generation of the 3D digital twins. As is well-known, CT delivers 3D voxels of superb resolution, much higher than the ground sampling distances (GSDs) of CV and photogrammetry. Thus, a decision was made to resolve CT models with lower and similar GSDs as used in CV/photogrammetry, but with denoising characteristics. It was also proven that endoscopic image blocks can be aligned in one structure-from-motion processing step, to estimate the poses of all images. This is a big advantage, although the image block data collection using endoscopes is difficult to maintain. Afterwards, pose estimation disparities for pixel-wise dense image matching are calculated and point clouds are derived. The fusion of CT 3D voxel clouds and CV/photogrammetry 3D colored point clouds is accomplished by a spatial similarity transformation embedded in the Gauss–Helmert model of statistical inference. The advantage of this fusion compared with classical ICP solutions is the quality assessment. Here the standard deviations of the fused 3D models are clear indicators for the goodness-of-fit of the CV-CT/photogrammetry data fusion process. The final model is three-dimensional and reconstructed with a precision of about 0.1 mm.
Finally the 2.5D and 3D digital twins are made open access in the glTF format, using the Goobi and the DaRUS platforms. Through the Library of the University of Stuttgart the maintenance and sustainability of the digital twins is secured for a period of ten years. This means researchers from all over the world can download the 2D photos, 2.5D and 3D digital twins, and the object semantics for their own research.
Our research is a first step into the 3D digitization of tech heritage and we are proud of the results achieved. The next steps are the Lego-wise decompositions of the complex gyroscopes using constructive solid geometry modeling. So far, we have decomposed simple structures such as the Machine of Bohnenberger and other surveying instruments using Maya, Blender, and Autodesk 3ds MAX in time-consuming manual work. To apply machine learning and deep learning methods to get similar quality by automatic decompositions compared with manual work provides an intriguing challenge, however this will take most probably another decade.


 ,
, 































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}