
Autonomous Water Quality Monitoring and Water Surface Cleaning for Unmanned Surface Vehicle



Abstract
:1. Introduction
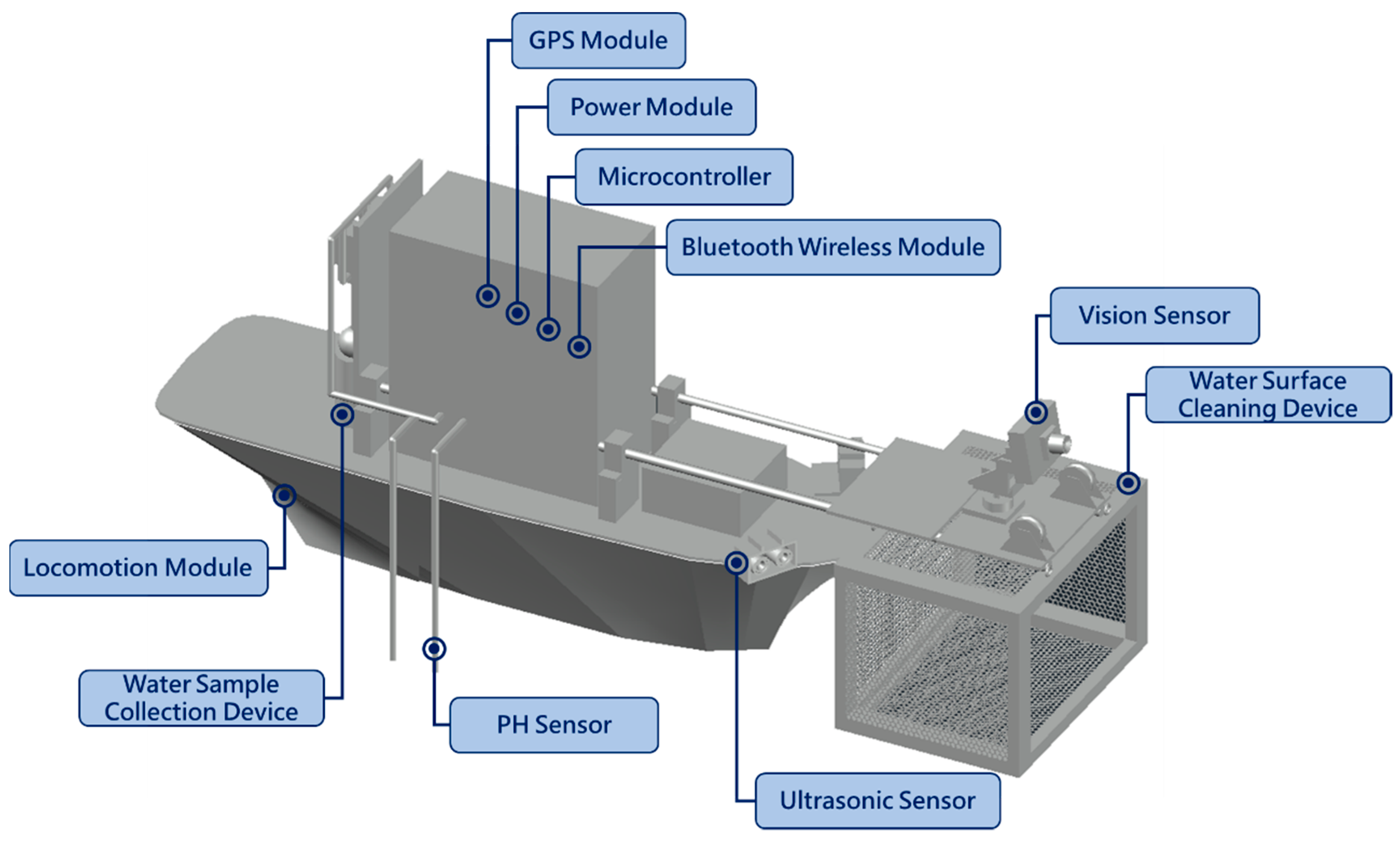
2. Prototype Design of Multi-Function Unmanned Surface Vehicle (MF-USV)
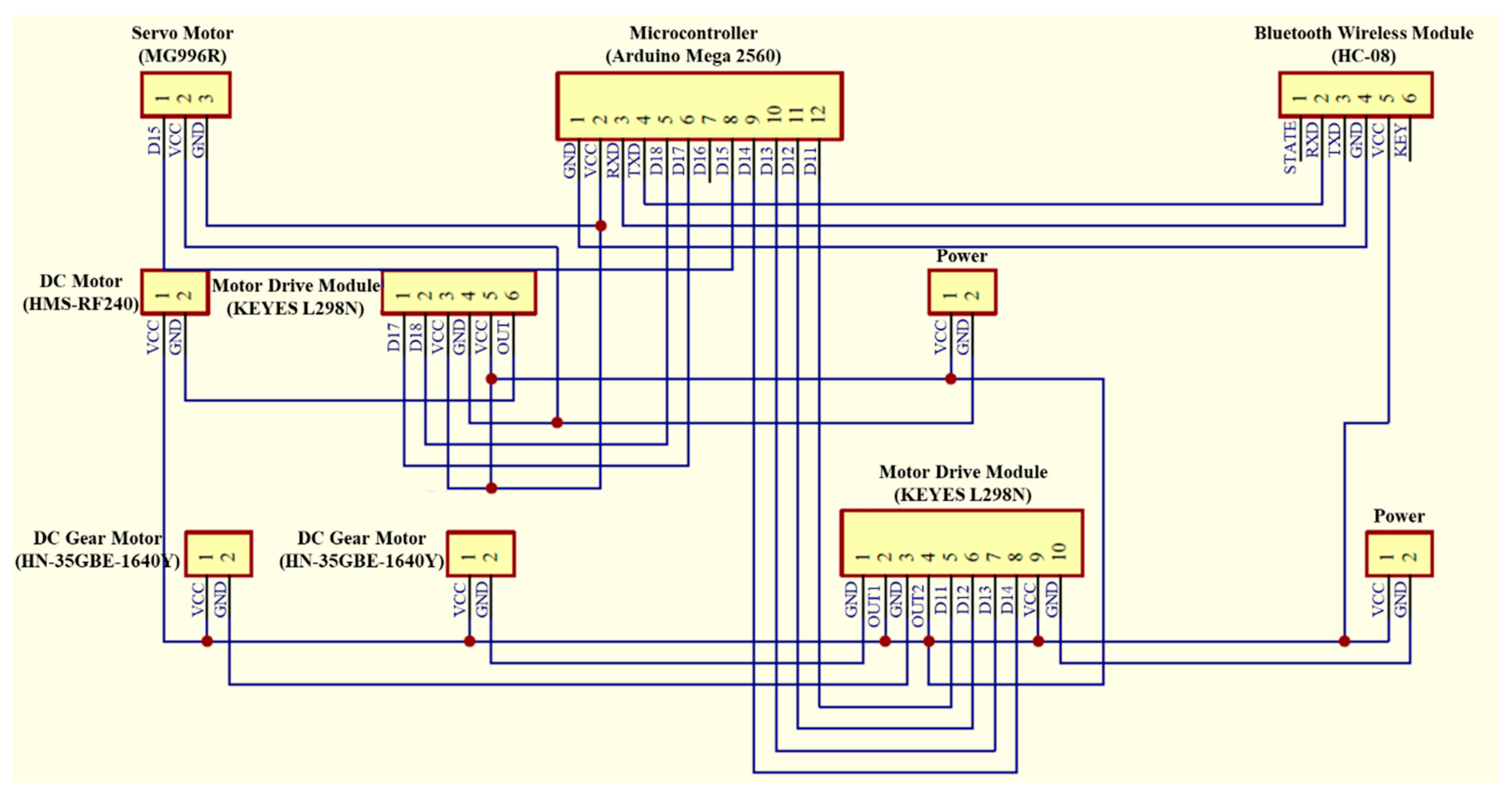
2.1. USV Main Control Unit
2.2. Locomotion Module
2.3. Positioning Module
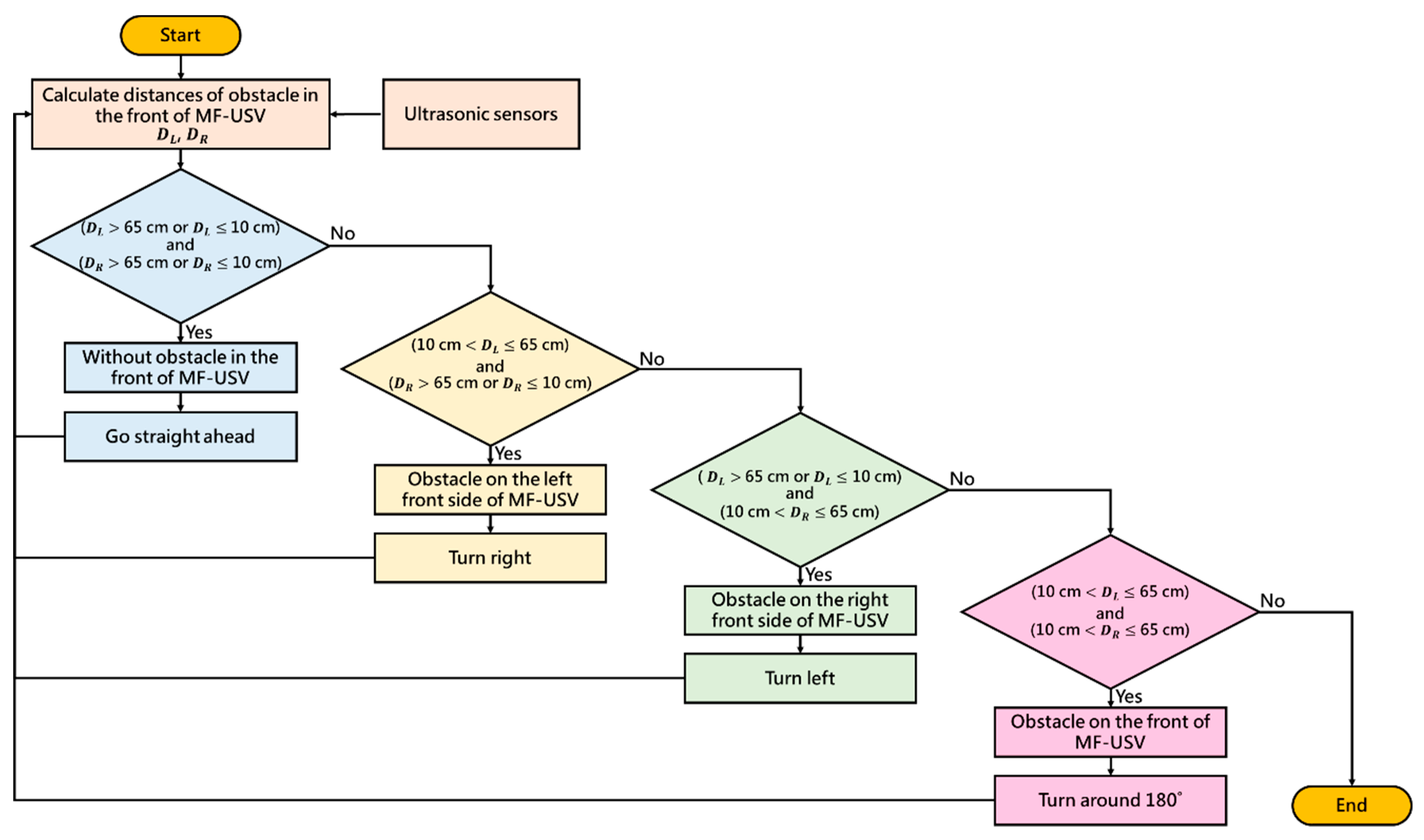
2.4. Obstacle Avoidance Module
2.5. Power Module and Communication Module
2.6. Remote Human–Machine Interface
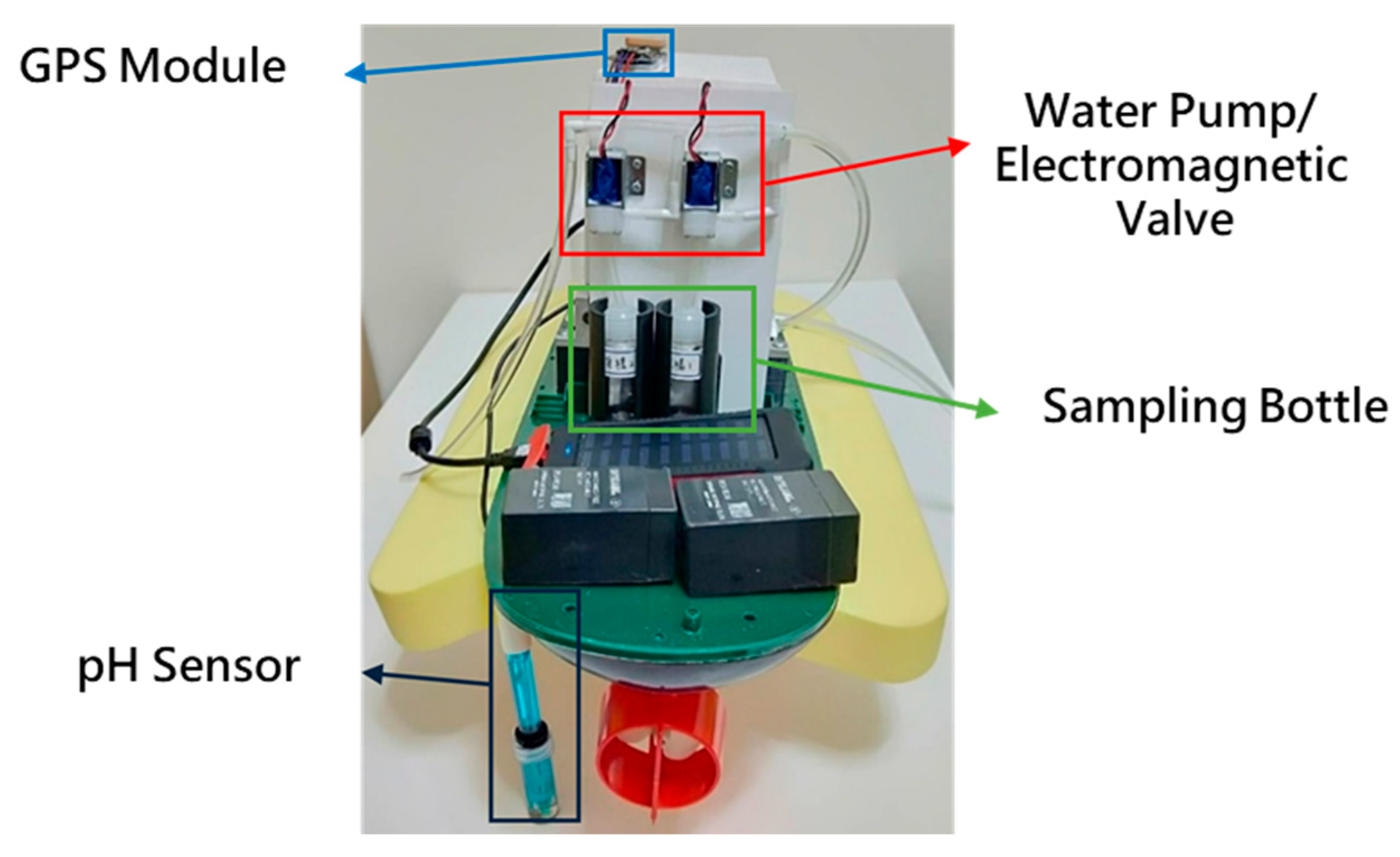
3. Water Quality Monitoring System
4. Water Surface Cleaning System
5. Experimental Results
5.1. Obstacle Avoidance
5.2. Water Quality Monitoring
5.3. Water Surface Cleaning
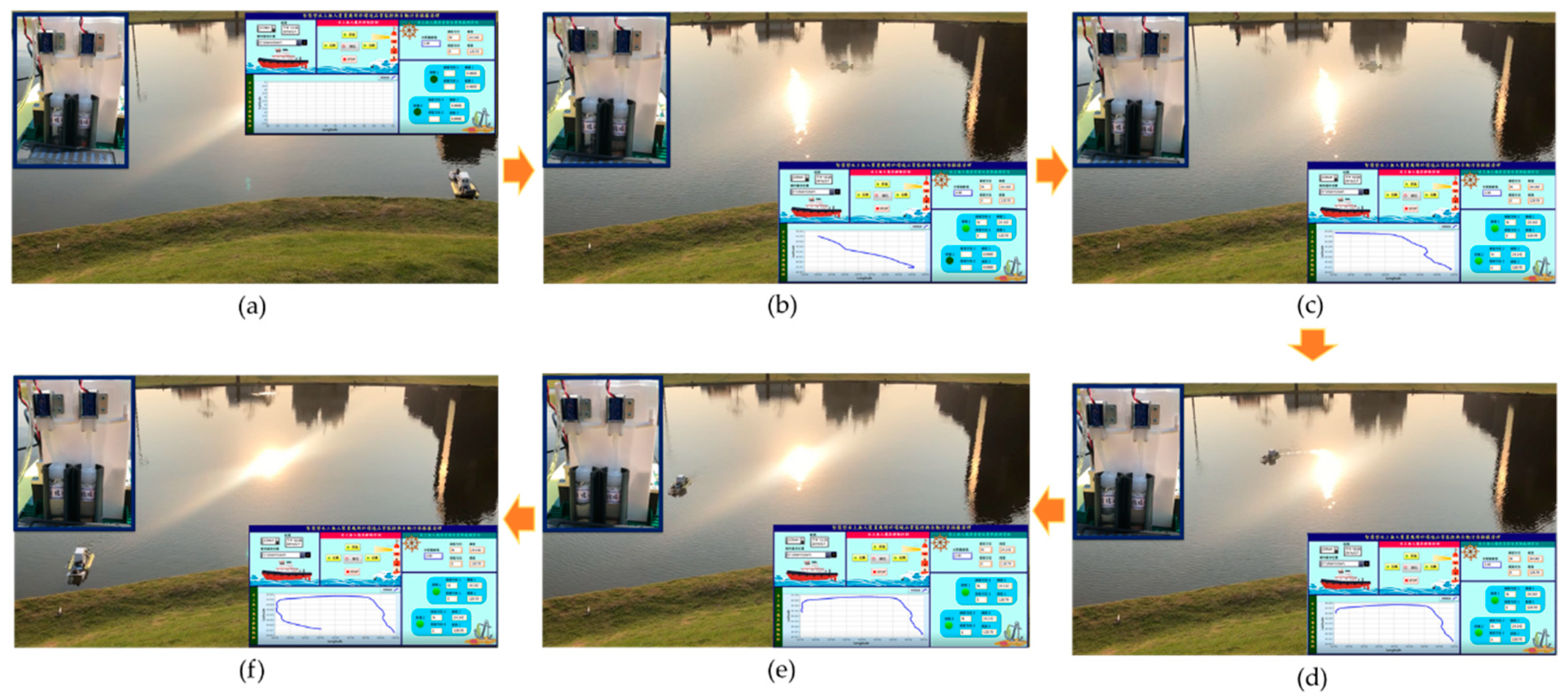
5.4. Multi-Function Tests
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Jambeck, J.R.; Geyer, R.; Wilcox, C.; Siegle, T.R.; Perryman, M.; Andrady, A.; Narayan, R.; Law, K.L. Plastic waste inputs from land into the ocean. Science 2015, 347, 768–771. [Google Scholar] [CrossRef] [PubMed]
- Lebreton, L.C.M.; Van der Zwet, J.; Damsteeg, J.W.; Slat, B.; Andrady, A.; Reisser, J. River plastic emissions to the world’s oceans. Nat. Commun. 2017, 8, 1–10. [Google Scholar] [CrossRef] [PubMed]
- Specht, M.; Specht, C.; Mindykowski, J.; Dabrowski, P.; Masnicki, R.; Marker, A. Geospatial modeling of the tombolo phenomenon in sopot using integrated geodetic and hydrographic measurement methods. Remote Sens. 2020, 12, 737. [Google Scholar] [CrossRef] [Green Version]
- Wang, N.; Xu, H. Dynamics-constrained global-local hybrid path planning of an autonomous surface vehicle. IEEE Trans. Veh. Technol. 2020, 69, 6928–6942. [Google Scholar] [CrossRef]
- Villa, J.; Aaltonen, J.; Koskinen, K.T. Path-following with LiDAR-based obstacle avoidance of an unmanned surface vehicle in harbor conditions. IEEE/ASME Trans. Mechatron. 2020, 25, 1812–1820. [Google Scholar] [CrossRef]
- Ferri, G.; Manzi, A.; Fornai, F.; Ciuchi, F.; Laschi, C. The HydroNet ASV, a small-sized autonomous catamaran for real-time monitoring of water quality: From design to missions at sea. IEEE J. Ocean. Eng. 2015, 40, 710–726. [Google Scholar] [CrossRef]
- Kong, S.; Tian, M.; Qiu, C.; Wu, Z.; Yu, J. IWSCR: An intelligent water surface cleaner robot for collecting floating garbage. IEEE Trans. Syst. Man Cybern. Syst. 2020. [Google Scholar] [CrossRef]
- Wang, H.; Guo, F.; Yao, H.; He, S.; Xu, X. Collision avoidance planning method of USV based on improved ant colony optimization algorithm. IEEE Access 2019, 7, 52964–52975. [Google Scholar] [CrossRef]
- Kim, H.; Koo, J.; Kim, D.; Park, B.; Jo, Y.; Myung, H.; Lee, D. Vision-based real-time obstacle segmentation algorithm for autonomous surface vehicle. IEEE Access 2019, 7, 179420–179428. [Google Scholar] [CrossRef]
- Steccanella, L.; Bloisi, D.D.; Castellini, A.; Farinelli, A. Waterline and obstacle detection in images from low-cost autonomous boats for environmental monitoring. Robot. Auton. Syst. 2020, 124, 1–11. [Google Scholar] [CrossRef]
- Guardeño, R.; López, M.J.; Sánchez, J.; Consegliere, A. AutoTuning environment for static obstacle avoidance methods applied to USVs. J. Mar. Sci. Eng. 2020, 8, 300. [Google Scholar] [CrossRef]
- Li, Y.; Tian, L.; Li, W.; Li, J.; Wei, A.; Li, S.; Tong, R. Design and experiments of a water color remote sensing-oriented unmanned surface vehicle. Sensors 2020, 20, 2183. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Madeo, D.; Pozzebon, A.; Mocenni, C.; Bertoni, D. A low-cost unmanned surface vehicle for pervasive water quality monitoring. IEEE Trans. Instrum. Meas. 2020, 69, 1433–1444. [Google Scholar] [CrossRef]
- Cao, H.; Guo, Z.; Wang, S.; Cheng, H.; Zhan, C. Intelligent wide-area water quality monitoring and analysis system exploiting unmanned surface vehicles and ensemble learning. Water 2020, 12, 681. [Google Scholar] [CrossRef]
- Cryer, S.; Carvalho, F.; Wood, T.; Strong, J.A.; Brown, P.; Loucaides, S.; Young, A.; Sanders, R.; Evans, C. Evaluating the sensor-equipped autonomous surface vehicle C-worker 4 as a tool for identifying coastal ocean acidification and changes in carbonate chemistry. J. Mar. Sci. Eng. 2020, 8, 939. [Google Scholar] [CrossRef]
- Ferri, G.; Jakuba, M.V.; Yoerger, D.R. A novel trigger-based method for hydrothermal vents prospecting using an autonomous underwater robot. Auton. Robot. 2010, 29, 67–83. [Google Scholar] [CrossRef] [Green Version]
- Alvarez, A.; Mourre, B. Optimum sampling designs for a glider-mooring observing network. J. Atmos. Ocean. Technol. 2012, 29, 601–612. [Google Scholar] [CrossRef] [Green Version]
- Leonard, N.E.; Paley, D.A.; Davis, R.E.; Fratantoni, D.M.; Lekien, F.; Zhang, F. Coordinated control of an underwater glider fleet in an adaptive ocean sampling field experiment in monterey bay. J. Field Robot. 2010, 27, 718–740. [Google Scholar] [CrossRef]
- Palacin, J.; Salse, J.A.; Valganon, I.; Clua, X. Building a mobile robot for a floor-cleaning operation in domestic environments. IEEE Trans. Instrum. Meas. 2004, 53, 1418–1424. [Google Scholar] [CrossRef]
- Kang, M.C.; Kim, K.S.; Noh, D.K.; Han, J.W.; Ko, S.J. A robust obstacle detection method for robotic vacuum cleaners. IEEE Trans. Consum. Electron. 2014, 60, 587–595. [Google Scholar] [CrossRef]
- Zhang, H.; Zhang, J.; Zong, G.; Wang, W.; Liu, R. Sky cleaner 3: A real pneumatic climbing robot for glass-wall cleaning. IEEE Robot. Autom. Mag. 2006, 13, 32–41. [Google Scholar] [CrossRef]
- Bai, J.; Lian, S.; Liu, Z.; Wang, K.; Liu, D. Deep learning based robot for automatically picking up garbage on the grass. IEEE Trans. Consum. Electron. 2018, 64, 382–389. [Google Scholar] [CrossRef] [Green Version]
- Wang, Z.; Liu, Y.; Yip, H.W.; Peng, B.; Qiao, S.; He, S. Design and hydrodynamic modeling of a lake surface cleaning robot. In Proceedings of the 2008 IEEE/ASME (AIM) International Conference on Advanced Intelligent Mechatronics, Xian, China, 2–5 July 2008; pp. 1343–1348. [Google Scholar]
- Ruangpayoongsak, N.; Sumroengrit, J.; Leanglum, M. A floating waste scooper robot on water surface. In Proceedings of the 2017 17th International Conference on Control, Automation and Systems (ICCAS), Jeju, Korea, 18–21 October 2017; pp. 1543–1548. [Google Scholar]
- Li, X.; Tian, M.; Kong, S.; Wu, L.; Yu, J. A modified YOLOv3 detection method for vision-based water surface garbage capture robot. Int. J. Adv. Robot. Syst. 2020, 17, 1–11. [Google Scholar] [CrossRef]
- Environmental Protection Administration Executive Yuan, R.O.C. (Taiwan). Available online: https://oaout.epa.gov.tw/law/LawContent.aspx?id=FL015490 (accessed on 4 February 2021).
- Lee, Y.S.; Juang, J.G. Color identification for quadcopter flight control and object inspection. Adv. Mech. Eng. 2019, 11, 1–16. [Google Scholar] [CrossRef] [Green Version]





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Reference | Function | Sensor | Algorithm |
|---|---|---|---|
| Villa et al. [5] | Obstacle avoidance | LiDAR | LOS-based GNC Algorithm |
| Wang et al. [8] | Obstacle avoidance | Navigation radar | IACO Algorithm |
| Kim et al. [9] | Obstacle detection | Vision sensors | Skip-ENet Algorithm |
| Steccanella et al. [10] | Waterline and obstacle detection | Camera | U-net CNN Algorithm |
| Guardeño et al. [11] | Obstacle avoidance | LiDAR | ATESOA algorithm |
| Li et al. [12] | Obstacle avoidance | Microwave radar, 4G Camera | -- |
| Water quality monitoring | Chl-a turbidity, water dissolved oxygen, water conductivity, oxidation-reduction potential, water temperature, salinity, pH sensors | -- | |
| Ferri et al. [6] | Obstacle avoidance | Laser scanner, Sonar, Altimeter | VFH+ algorithm |
| Water quality monitoring | Chemical sensors (Hg, Cr, Cd, and dispersed oil) | -- | |
| Madeo et al. [13] | Water quality monitoring | pH sensor, ORP sensor, salinity sensor, dissolved oxygen probe | -- |
| Cao et al. [14] | Water quality monitoring | pH sensor, TDS sensor, turbidity sensor | Ensemble learning algorithm |
| Cryer et al. [15] | Water quality monitoring | CTD, DO, pH, pCO2, nitrate, chlorophyll fluorescence, CDOM, turbidity, DOC sensors | -- |
| Kong et al. [7] | Water surface cleaning | Vision module, Grasper | YOLOv3 algorithm |
| Wang et al. [23] | Water surface cleaning | Conveyor belt | -- |
| Ruangpayoongsak et al. [24] | Water surface cleaning | Camera, waste scooper | -- |
| Li et al. [25] | Water surface cleaning | Camera, collection box | YOLOv3 algorithm |
| Proposed MF-USV | Obstacle avoidance | Ultrasonic Sensors | Threshold-based obstacle avoidance algorithm |
| Water quality monitoring | pH sensor | -- | |
| Water surface cleaning | Vision sensor, salvage net | Hue-based color filtering algorithm |
| Components | Description | Weight (g) | Estimate of the Average Electric Power Consumption (W) | Notes |
|---|---|---|---|---|
| Main Controller | 2 × ATmega2560 (Arduino Mega2560) AVR® 8-Bit Microcontroller at 16 MHz Communication interface: Universal Asynchronous Receiver Transmitter (UART), Inter-Integrated Circuit (I2C), Serial Peripheral Interface (SPI), General Purpose Input/Output (GPIO) | 74 | 0.4 | |
| Locomotion Module | Propulsion: HMS-RF240 DC motor Rudder motor: MG996R Servo motor Motor drive module: KEYES L298N Electric propeller Rudder and actuation mechanism | 135 | 5.52 | Maximum propeller speed: 15 cm/s Maximum rudder speed: 300°/s |
| Positioning Module | GY-GPS6MV2 NEO-6M-5Hz GPS Antenna GPS | 18 | 0.14 | |
| Ultrasonic Sensor | 2 × HC-SR04 | 17 | 0.02 | Microcontroller collects data from the ultrasonic sensors, execute the obstacle detection and avoidance algorithm |
| pH Sensor | SEN0161 pH sampling probe | 75 | 0.2 | |
| Water Sample Collection Device | R385 Water pump 2 × Electromagnetic valve 2 × Sampling bottle | 387 | 1.7 | Total volume of two sampling bottles: 60 ml |
| Vision Sensor | Pixy CMUcam5 Processor: NXP LPC4330 at 204 MHz Communication interface: UART, I2C, SPI, USB Image sensor: Omnivision OV9715 2 × GS-9018 Servo motor | 27 | 0.7 | |
| Water Surface Cleaning Device | 2 × HN-35GBE-1640Y DC gear motor Motor drive module: KEYES L298N Cleaning device: Salvage net | 1159 | 0.38 | |
| Communication Module | 2×HC-08 Bluetooth wireless module | 7 | 0.09 | |
| Cabling and Boxes | Plastic boxes with waterproof connectors and glands | 233 | -- | |
| Hulls and Deck | 1073 | -- | ||
| Total | 3205 (without batteries) | 9.15 |
| Sensor Type | Image | Range | Working Voltage (V) | Accuracy | Producer |
|---|---|---|---|---|---|
| GPS |  | ≥−161 dBm | 3.3~5.0 | Position: 2.5 m Velocity: 0.1 m/s Heading: 0.5° | U-BLOX 1 |
| Ultrasonic |  | 2~400 cm | 3.3~5.0 | 0.3 cm | ELECFREAKS 2 |
| pH |  | 0~14 | 5.0 | ±0.1 pH | DFROBOT 3 |
| Vision |  | Lens field of view: ±37.5° horizontal ±23.5° vertical | 6.0~10.0 | Resolution: 1280 × 800 dpi | PIXYCAM 4 |
| Angle | −30° | −15° | 0° | 15° | 30° | |
|---|---|---|---|---|---|---|
| Distance | ||||||
| 40 cm | 100% | 100% | 100% | 100% | 100% | |
| 70 cm | 100% | 100% | 100% | 100% | 100% | |
| 100 cm | 94% | 97% | 99% | 99% | 96% | |
| 130 cm | 89% | 94% | 98% | 97% | 93% | |
| Angle | Left 15°~30° | Left 0°~15° | Front 0° | Right 0°~15° | Right 15°~30° | |
|---|---|---|---|---|---|---|
| Distance | ||||||
| 130 cm | 70% | 92% | 95% | 95% | 75% | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chang, H.-C.; Hsu, Y.-L.; Hung, S.-S.; Ou, G.-R.; Wu, J.-R.; Hsu, C. Autonomous Water Quality Monitoring and Water Surface Cleaning for Unmanned Surface Vehicle. Sensors 2021, 21, 1102. https://doi.org/10.3390/s21041102
Chang H-C, Hsu Y-L, Hung S-S, Ou G-R, Wu J-R, Hsu C. Autonomous Water Quality Monitoring and Water Surface Cleaning for Unmanned Surface Vehicle. Sensors. 2021; 21(4):1102. https://doi.org/10.3390/s21041102
Chicago/Turabian StyleChang, Hsing-Cheng, Yu-Liang Hsu, San-Shan Hung, Guan-Ru Ou, Jia-Ron Wu, and Chuan Hsu. 2021. "Autonomous Water Quality Monitoring and Water Surface Cleaning for Unmanned Surface Vehicle" Sensors 21, no. 4: 1102. https://doi.org/10.3390/s21041102
APA StyleChang, H. -C., Hsu, Y. -L., Hung, S. -S., Ou, G. -R., Wu, J. -R., & Hsu, C. (2021). Autonomous Water Quality Monitoring and Water Surface Cleaning for Unmanned Surface Vehicle. Sensors, 21(4), 1102. https://doi.org/10.3390/s21041102