
Application of Measurement Sensors and Navigation Devices in Experimental Research of the Computer System for the Control of an Unmanned Ship Model


Abstract
:1. Introduction
- Improvements and further increases in the safety of maritime transport: the analyses of maritime accidents and catastrophes carried out indicate that their cause is not a failure of the ship’s equipment, but only human error (depending on the type—collision, grounding, fire—man is responsible for from 80–96% of all accidents, [1,2,3];
- Reduction in ship operation costs: about 20–30% of these costs is the maintenance of the crew and shipowners’ services dealing with the crew;
- Environmental protection: although maritime transport accounts for about 3% of the world’s CO2 emissions to the atmosphere, new ship designs are expected to have completely green propulsion systems;
- Improvements in other indicators affecting the economic side of maritime transport: new hull design with less weight will result in better use of ship displacement;
- More accurate running of ships on the shipping lines, which can lead to a reduction in energy expenditure, reduced voyage time, or improved punctuality of entry into the port of unloading.
2. Status of Research on Autonomous Control Systems for Unmanned Ships
- Construction and testing of remote and then autonomous control systems on existing crew ships (usually small car-passenger ferries operating at short distances);
- Design, construction and experimental research of unmanned transport vessels in the first stage, these are physical models of ships with a length of several meters and then the construction of target unmanned vessels.
- Tests of autonomous control on Falco’s Finnish car ferry—December 2018 [5]: the ferry performs autonomous maneuvers, is supervised by an operator from the land-based center in Turku. No information about the applied measurement and navigation devices, algorithms, and control programs is available.
- Tests of autonomous control of the ferry Suomenlinna II—Finland, December 2018 [6]: tests monitored from the land-based center in Helsinki. No information about the applied measuring and navigation devices, algorithms, and control programs.
- Autonomous control tests on the supply vessel SeaZip 3, the Netherlands, in the North Sea—March 2019 [7]: no information about the applied measuring and navigation devices, algorithms and control systems.
- The Re-Volt—remote container ship with electric drive (Norway) [8]: designed from 2017 by DNV GL, it is to carry 100 TEU; there is no information about the ship’s construction and propulsion and no information about the applied, for autonomous control, measuring and navigation devices, and about the effects of experience from the realized project.
3. Purpose, Scope, and Test Method
- Automatic mooring/unmooring to the quay;
- Selection and optimization of the shipping route from one port to another;
- Maritime detection of fixed and mobile objects (other vessels);
- Possibility to switch to remote control (change of autonomy level);
- Performing anti-collision maneuvers;
- Electronic communication between ships;
- Other functions (after the formulation of rules for autonomous vessels).
- The propulsion system of the model of the ship must be ecological and emission-free with smooth regulation of control parameters;
- Computer system parameters (computing power, memory capacity, speed of processing measurement data, their recording in the memory, and transmission to the Ground Control Station (GCS) must be adjusted to the volume (number) and frequency of recorded parameters;
- The set of measurement sensors and navigation devices must be able to perform all of the above functions;
- Technical and operational parameters of the computer system components (e.g., dimensions, range, measurement accuracy, etc.) must be appropriate for the ship model (dimensions, speed of movement of the ship model—Table 1);
- The cost of building the system should be as low as possible.
- Correct operation of the computer system, measurement and navigation sensors, and registration of all parameters;
- Correctness of processing and sending received signals from these sensors to the computer control system;
- Computing capacity of a computer made in industrial technology receiving and processing the recorded and measured parameters from measurement sensors and navigation devices;
- The correctness of sending the recorded parameters from the measurement and navigation sensors in real time to GCS;
- Correct detection of obstacles set on the water and performing anti-collision maneuvers;
- The correctness of switching to manual or remote control with GCS or when changing the autonomy level.
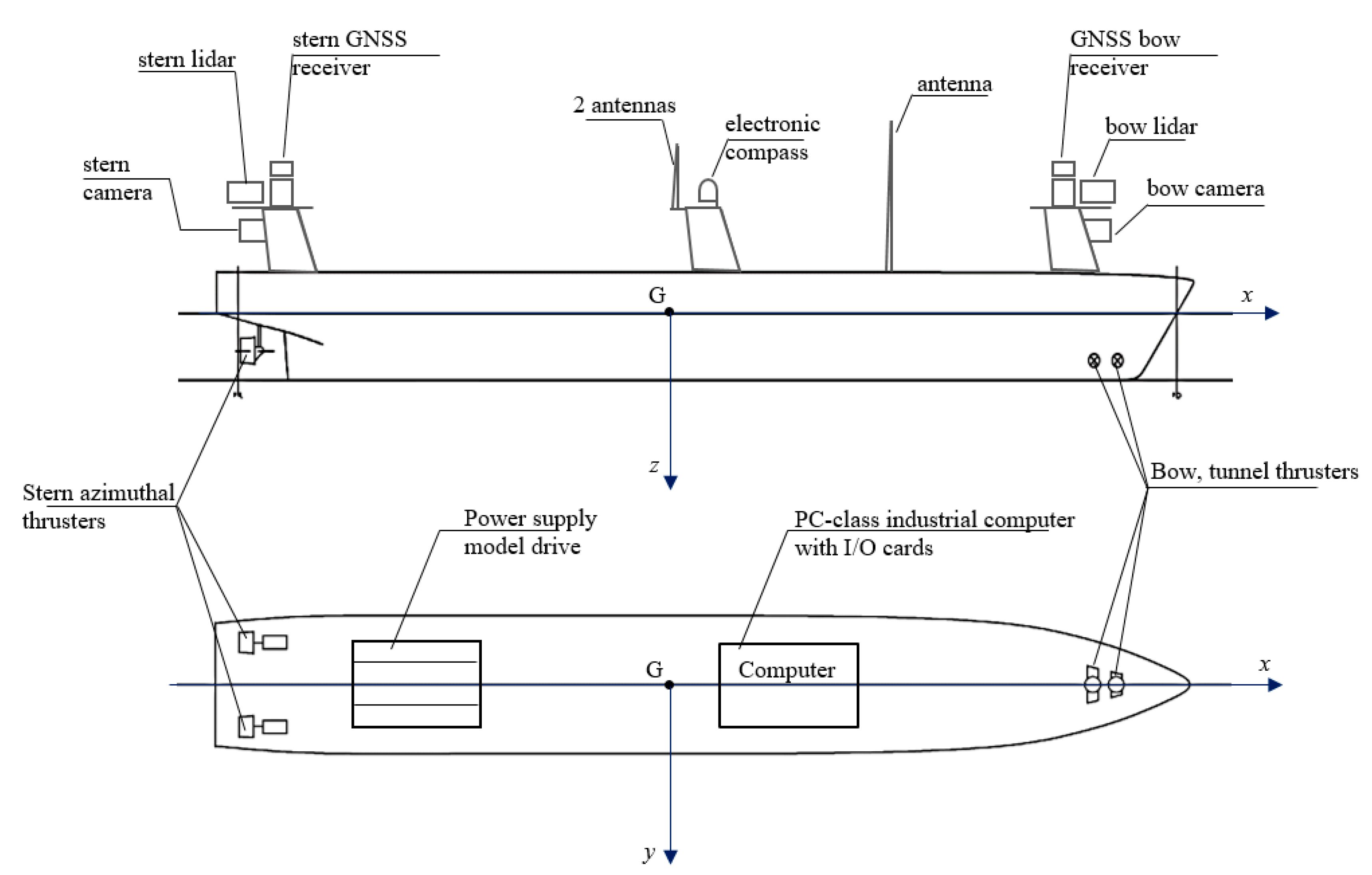
4. Experimental Model of an Unmanned Transport Vessel Controlled Autonomously
- Two stern azimuthal thrusters;
- Two bow tunnel thrusters.
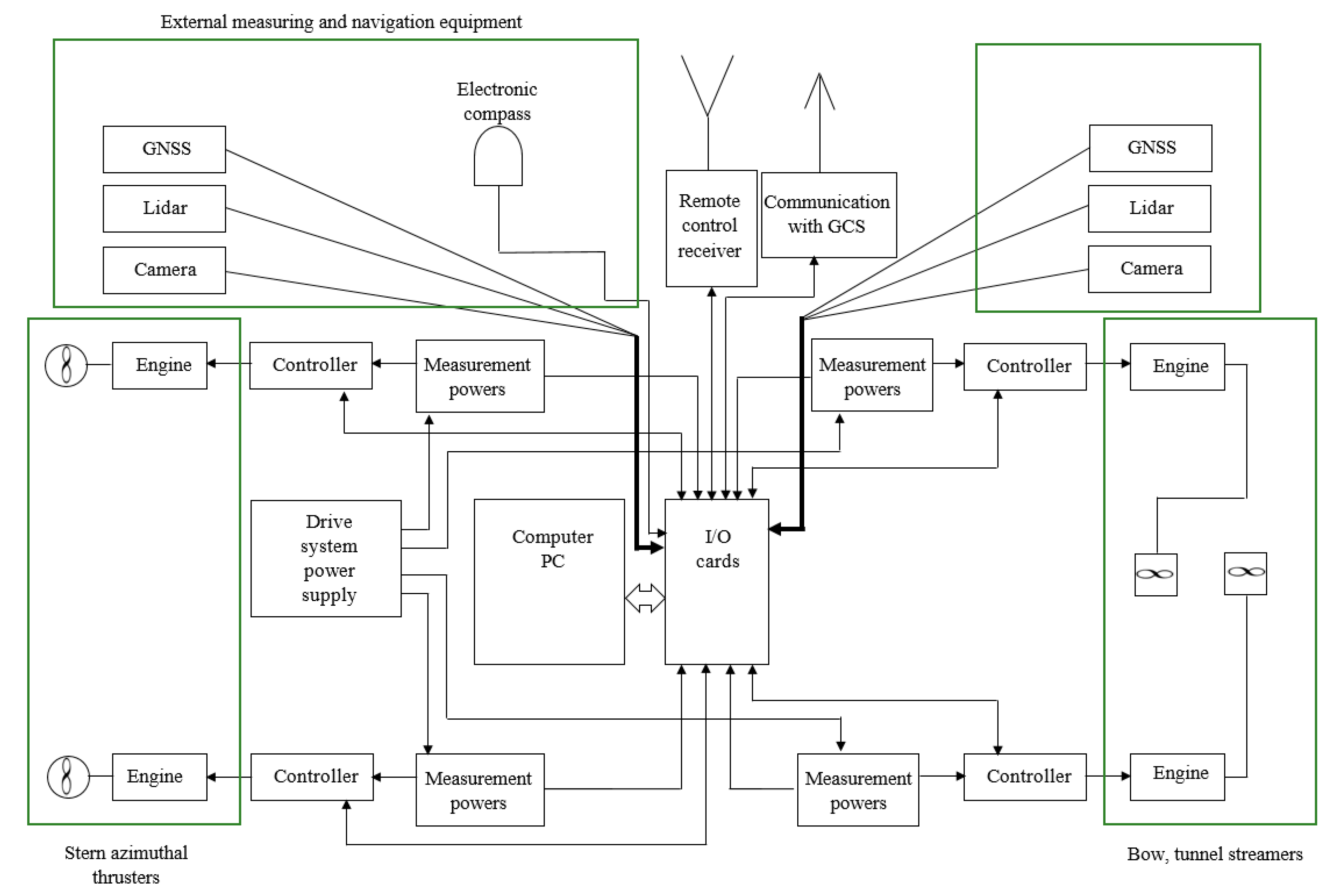
- PC-class computer;
- I/O cards (analog–digital and digital–digital);
- Individual controllers for each drive motor;
- RC receiver (remote control in emergency situations or change of autonomy level);
- Internal Ethernet network;
- External antennas for communication on different frequencies;
- A set of measuring sensors and navigation devices adequate for the model of an unmanned transport vessel and planned tests of autonomous control.
- Processing data from all sensors;
- Performing calculations resulting from ship model control algorithms;
- Machine learning using artificial intelligence.
- Conversion of data sent by the computer into motor control signals—PWM;
- Sensor readings for measuring the power consumed by motors;
- Reading the system supply voltage;
- Reading data from the ship’s emergency manual control system;
- Reading data from the direct control receiver.
- The I/O module has a Fail Safe mode—in case of suspension of the PC software during testing new algorithms, it allows one to take over manual control of the ship model;
- Independent power system monitoring and response to battery charge status;
- Prevents accidental startup of drive systems during software testing;
- Provides a long-range emergency communication channel;
- It is possible to modify the I/O module software to implement a simple software controlling system, which, in the event of a Fail Safe condition, will allow the ship model to return to a preset position.
- Suspension or lack of communication between the PC and I/O module: the software sends cyclically, in addition to control and read commands, a data frame called heart beat—a frame of a few bytes sent at a software-controlled frequency of 1–0.1 Hz as a request–response. If the frame does not arrive in the expected time, the I/O module stops the thrusters and switches the control mode to manual.
- I/O Module Software Suspend: Software Watchdog 500 ms (can be reduced if necessary).
- Loss of the manual control signal (priority—the system provides for manual control of the ship model in every situation): then, the thrusters are stopped (worst case scenario) and the ship model has to be recovered by itself. It is possible to extend the I/O module by a function for automatic ship model return.
- Supply level too low: A two-stage action is provided. When the first level is exceeded, the I/O module will not allow a high-power task. When the second level is exceeded, the thrusters are stopped, but the system can be switched to manual mode and the thrusters can be forced to work manually until the batteries are completely discharged—this is an extreme emergency situation and destructive for the batteries, but in some situations, it must be possible to move the model ship away from a dangerous place, e.g., to avoid a collision. All values are configured in the I/O module. The operator can view these data in the GCS and is informed in advance when the critical values are approached.
5. Measuring Sensors and Navigation Devices Used in the Autonomous Control System
- Lidars working in the 360° range (bow and stern);
- Global Navigation Satellite Systems (GNSS) receivers (bow and stern);
- Electronic compass;
- HD cameras (bow and stern).
6. Results of Tests of the Computer System and Measurement and Navigation Devices
7. Discussion of Test Results
- During the software hang of the I/O module, the software Watchdog was 500 ms (can be reduced if necessary).
- The time delay for the I/O module to respond to a command from the PC is between 1.2 and 1.6 ms. To speed up communication, it is possible to change communication from ASCII to binary format. The system is equipped with a CAN bus, which can also be used for future data exchange between the PC and I/O module.
- The conversion time in the I/O module of the analog signals to digital was about 1 μs (12-bit converters). The total conversion time of analog values is, for 5 A/D channels, about 5 μs. Each measurement channel is software averaged and also filtered using a median filter for a sequence of 5 samples. The result is then converted to an output value (mA) and compared to a 5-point calibration curve for each sensor (calibration performed according to a certified current meter with adjustable current load).
- Approximate delay time between issuing the command from the PC to change the speed of the thruster and its execution is about 2–3 ms. The delay is the sum of communication time—UART, ASCII, decoding of information sent over the I2c bus (400 kHz) to the PWM generator, and the response of the generator itself.
- All measuring sensors and navigational equipment were working properly and all recorded parameters were transmitted in real time to the control computer installed in the model vessel.
- Lidars were installed to detect obstacles on the water, regardless of the course of the ship in relation to the obstacles (the distance and position of the model ship in relation to the obstacle was determined on the basis of the image from the lidar).
- All recorded parameters from measuring sensors and navigation devices were properly registered in the on-board computer and prepared for transmission to the land station (GCS).
- All computational operations connected with recording and processing parameters from measurement sensors and navigation devices required from 10 to 15% of the total computational power of the on-board computer.
- After changing the broadband network frequency, the interference in the transmission of video from cameras and lidars no longer occurred; after a series of tests, it was concluded that the broadband transmission should be modified and the 5G LTE network should be used.
8. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Chauvina, C.; Lardjaneb, S.; Morela, G.; Clostermannc, J.P.; Langard, B. Human and organisational factors in maritime accidents: Analysis of collisions at sea using the HFACS. Accid. Anal. Prev. 2013, 59, 26–37. [Google Scholar] [CrossRef] [PubMed]
- Herdzik, J. Analiza skutków wybranych wypadków na morzu jako zagrożeń utrudniających akcje ratownicze. Logistyka 2014, 4, 419–429. [Google Scholar]
- Cordon, J.R.; Walliser, J.; Mestre, J.M. Human factor: The key element of maritime accidents. In Proceedings of the Atlantic Stakeholder Platform Conference, Brest, France, 29 October 2015. [Google Scholar] [CrossRef]
- gCaptain. Rolls-Royce on Drone Ships: It’s Not If, It’s When. 2016. Available online: https://gcaptain.com/rolls-royce-on-drone-ships-its-not-if-its-when/ (accessed on 15 May 2019).
- PortalMorski.pl. Pierwszy, w pełni Autonomiczny Prom Rolls-Royce’a. 2018. Available online: https://www.portalmorski.pl/zegluga/41181-pierwszy-w-pelni-autonomiczny-prom-rolls-royce-a (accessed on 15 May 2019).
- GospodarkaMorska.pl. Kolejny Eksperyment z Udziałem Promu Bezzałogowego Zakończony Sukcesem. 2018. Available online: https://www.gospodarkamorska.pl/Porty,Transport/kolejny-eksperyment-zudzialem-promu-bezzalogowego-zakonczony-sukcesem-html (accessed on 30 May 2019).
- CTV Seazip 3. 2019. Available online: https://www.seazip.com/our-fleet/ctv-seazip-3/ (accessed on 4 October 2019).
- DNV-GL. The ReVolt. A New Inspirational Ship Concept. 2019. Available online: https://www.dnvgl.com/technology-innovation/revolt/index.html (accessed on 30 May 2019).
- Kongsberg New Norwegian Autonomous Shipping Test-Bed Opens. 2017. Available online: https://www.kongsberg.com/maritime/about-us/news-and-media/news-archive/2017/new-norwegianautonomous-shipping-test-bed-opens/ (accessed on 4 October 2019).
- GospodarkaMorska.pl. Prace przy Yara Birkeland Wstrzymane ze Względu na Pandemię Koronawirusa. 2020. Available online: https://www.gospodarkamorska.pl/stocznie-offshore-prace-przy-yara-birkeland-wstrzymane-ze-wzgledu-na-pandemie-koronawirusa-49143. (accessed on 12 May 2020).
- Specht, C.; Świtalski, E.; Specht, M. Application of an Autonomous/Unmanned Survey Vessel (ASV/USV) in Bathymetric Measurements. Pol. Marit. Res. 2017, 24, 36–44. [Google Scholar] [CrossRef] [Green Version]
- Schiaretti, M.; Chen, L.; Negenborn, R.R. Survey on Autonomous Surface Vessels: Part I—A New Detailed Definition of Autonomy Levels, Part II—Categorization of 60 Prototypes and Future Applications; Computational Logistics. ICCL 2017. Lecture Notes in Computer Science; Springer: Cham, Switzerland, 2017; Volume 10572. [Google Scholar] [CrossRef]
- Stateczny, A.; Burdziakowski, P. Universal Autonomous Control and Management System for Multipurpose Unmanned Surface Vessel. Pol. Marit. Res. 2019, 26, 30–39. [Google Scholar] [CrossRef] [Green Version]
- Moreira, L.; Santos, F.P.; Mocanu, A.; Liberato, M.; Pascoal, R.; Guedes Soares, C. Instrumentation Used on Guidance, Control and Navigation of a Ship Model. In Proceedings of the 8th Portuguese Conference on Automatic Control (CONTROLO), Vila Real, Portugal, 21–23 July 2008. [Google Scholar]
- Moreira, L.; Guedes Soares, C. Autonomous Ship Model to Perform Manoeuvring Tests. J. Marit. Res. 2011, 8, 29–46. [Google Scholar]
- Perera, L.P.; Moreira, L.; Santos, F.P.; Ferrari, V.; Sutulo, S.; Guedes Soares, C. A Navigation and Control Platform for Real-Time Manoeuvring of Autonomous Ship Models. In Proceedings of the 9th IFAC Conference on Manoeuvring and Control of Marine Craft, The International Federation of Automatic Control, Arenzano, Italy, 19–21 September 2012. [Google Scholar]
- Perera, L.P.; Ferrari, V.; Santos, F.P.; Hinostroza, M.A.; Guedes Soares, C. Experimental Evaluations on Ship Autonomous Navigation and Collision Avoidance by Intelligent Guidance. IEEE J. Ocean. Eng. 2015, 40, 374–387. [Google Scholar] [CrossRef]
- Reed, S.; Schmidt, V.E. Providing Nautical Chart awareness to autonomous surface vessel operations. In Proceedings of the OCEANS 2016 MTS/IEEE Monterey, Monterey, CA, USA, 19–23 September 2016. [Google Scholar]
- Son, N.S.; Kim, S.Y. On the sea trial test for the validation of an autonomous collision avoidance system of unmanned surface vehicle. In Proceedings of the OCEANS 2018 MTS/IEEE Charleston, Charleston, SC, USA, 22–25 October 2018; pp. 1–5. [Google Scholar]
- Lee, J.; Woo, J.; Kim, N. Vision and 2D LiDAR based autonomous surface vehicle docking for identify symbols and dock task in 2016. In Proceedings of the 2017 IEEE Underwater Technology (UT), Busan, South Korea, 21–24 February 2017. [Google Scholar]
- Song, H.; Lee, K.; Kim, D.H. Obstacle avoidance system with LiDAR sensor based fuzzy control for an autonomous unmanned ship. In Proceedings of the 2018 Joint 10th International Conference on Soft Computing (SCIS) and Intelligent Systems and 19th International Symposium on Advanced Intelligent Systems (ISIS), Toyama, Japan, 5–8 December 2018. [Google Scholar]
- Zaleski, P. Problemy rozwoju statków autonomicznych. In Akademickie Aktualności Morskie, 3(107), Magazyn Informacyjny Akademii Morskiej w Szczecinie; Scientific Publishing House of the Maritime University of Szczecin: Szczecin, Poland, 2020. [Google Scholar]
- Szelangiewicz, T.; Żelazny, K. Hydrodynamic characteristics of the propulsion system thrusters of the unmanned ship model. Sci. J. issued Marit. Univ. Szczec. 2020, 32, 136–141. [Google Scholar]
- Szczecin Google Maps. Available online: https://www.google.pl/maps/place/Jezioro+G%C5%82%C4%99bokie/@53.4768631,14.4658762,13.92z/data=!4m5!3m4!1s0x47aa0c2d98d84a27:0x9fd8d04bd7861d6!8m2!3d53.4771739!4d14.4759493 (accessed on 30 August 2020).
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Unit | Ship | Model (Scale 1:25) |
|---|---|---|---|
| Length over all Loa | m | 78.75 | 3.15 |
| Length between perpendiculars LPP | m | 75.00 | 3.00 |
| Breadth B | m | 11.10 | 0.47 |
| Draft T | m | 4.33 | 0.17 |
| Displaced value ∇ | m3 | 2500.00 | 0.16 |
| Block coefficient cB | - | 0.6589 | 0.6589 |
| Velocity V | m/s | 8.22 | 1.64 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Szelangiewicz, T.; Żelazny, K.; Antosik, A.; Szelangiewicz, M. Application of Measurement Sensors and Navigation Devices in Experimental Research of the Computer System for the Control of an Unmanned Ship Model. Sensors 2021, 21, 1312. https://doi.org/10.3390/s21041312
Szelangiewicz T, Żelazny K, Antosik A, Szelangiewicz M. Application of Measurement Sensors and Navigation Devices in Experimental Research of the Computer System for the Control of an Unmanned Ship Model. Sensors. 2021; 21(4):1312. https://doi.org/10.3390/s21041312
Chicago/Turabian StyleSzelangiewicz, Tadeusz, Katarzyna Żelazny, Andrzej Antosik, and Maciej Szelangiewicz. 2021. "Application of Measurement Sensors and Navigation Devices in Experimental Research of the Computer System for the Control of an Unmanned Ship Model" Sensors 21, no. 4: 1312. https://doi.org/10.3390/s21041312
APA StyleSzelangiewicz, T., Żelazny, K., Antosik, A., & Szelangiewicz, M. (2021). Application of Measurement Sensors and Navigation Devices in Experimental Research of the Computer System for the Control of an Unmanned Ship Model. Sensors, 21(4), 1312. https://doi.org/10.3390/s21041312