
Biped Walking Based on Stiffness Optimization and Hierarchical Quadratic Programming


Abstract
:1. Introduction
- (1)
- The velocity feedback controller was used to calculate the foot placement in every control period, which is respectively used to predict the next landing state and generate the actual trajectory of the swinging leg.
- (2)
- The touch down state is taken as the regression mapping state, so that the spring stiffness can be updated immediately after the uneven ground disturbance.
- (3)
- The optimization variables are reduced. Only the spring stiffness and damping coefficient are optimized to speed up the calculation. Meanwhile, the spring stiffness is divided into two parts based on midstance to increase the solving space.
- (4)
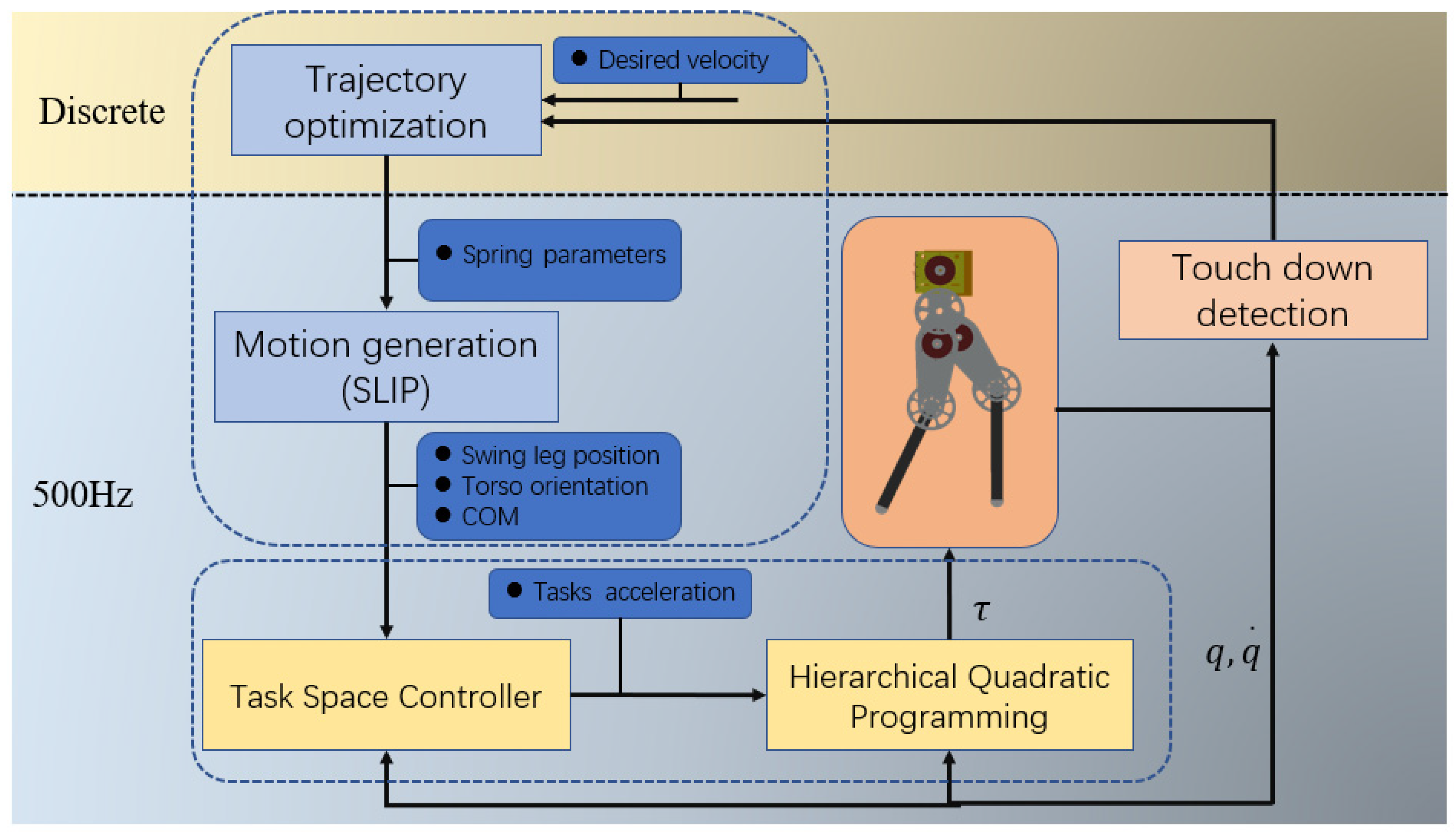
- HQP is used to realize the mapping of the simple robot model to the whole-body dynamic model. Whole-body motion control is realized with a strict priority of tasks.
2. Trajectory Optimization of Center of Mass
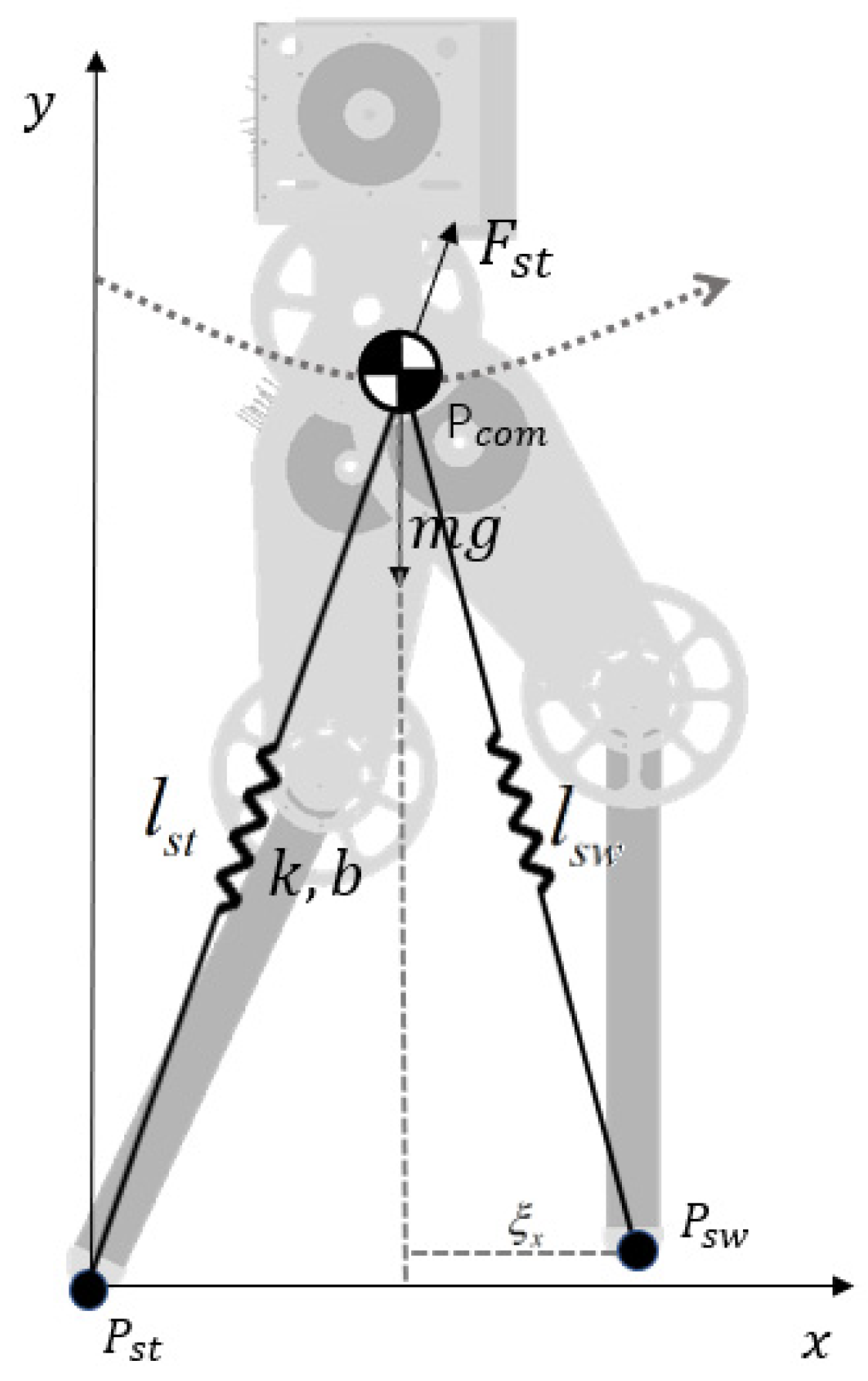
2.1. Spring-Loaded Inverted Pendulum Model
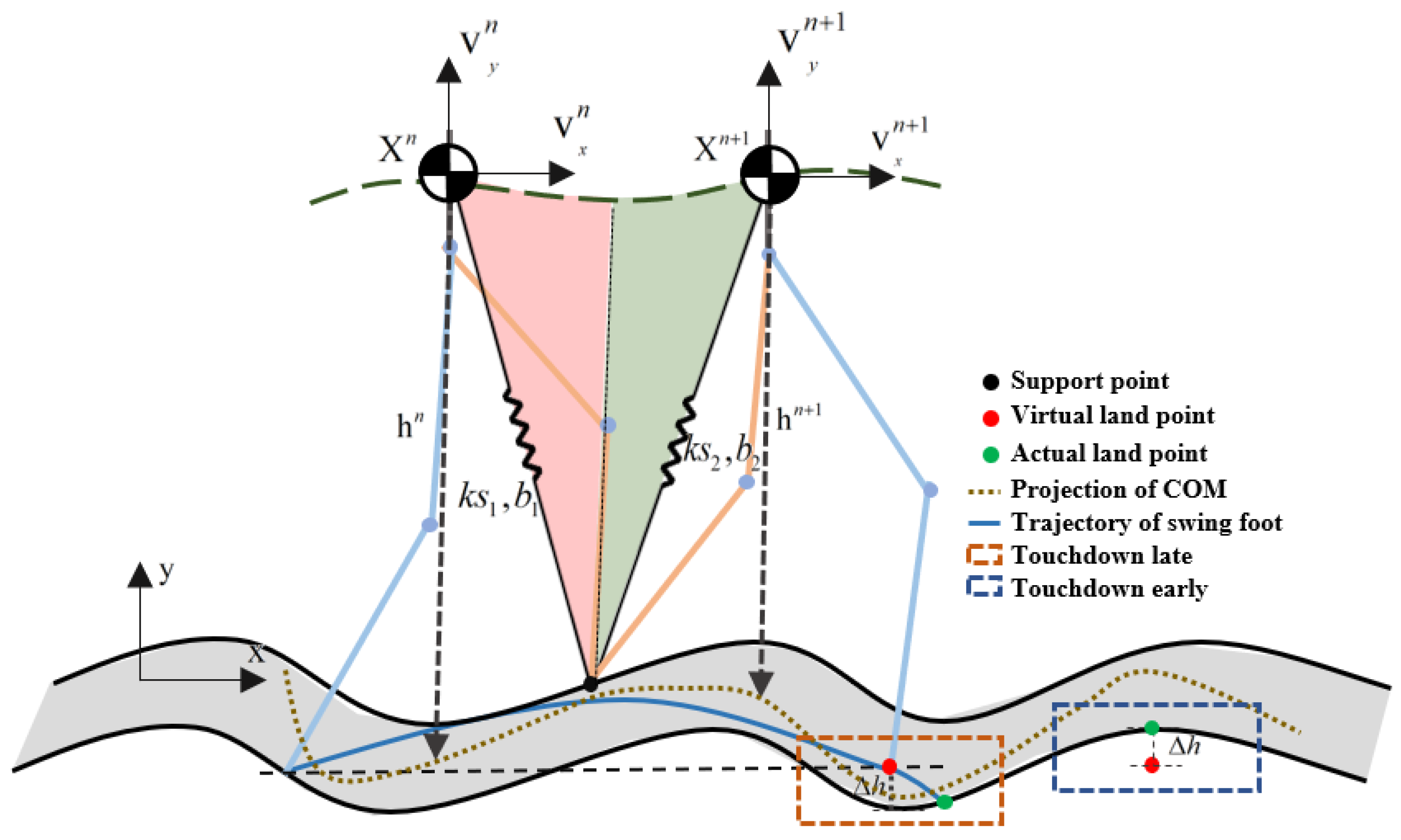
2.2. Touchdown Return Map
2.3. Stiffness Optimization
2.4. Real-Time Trajectory Generation
3. Whole Body Control Based on Hierarchical Quadratic Programming
3.1. Hierarchical Quadratic Programming
3.2. Robot Configuration and Dynamics
3.3. Task Space Controller and Constraint
3.4. Prioritized Whole-Body Control
4. Simulation and Experiment
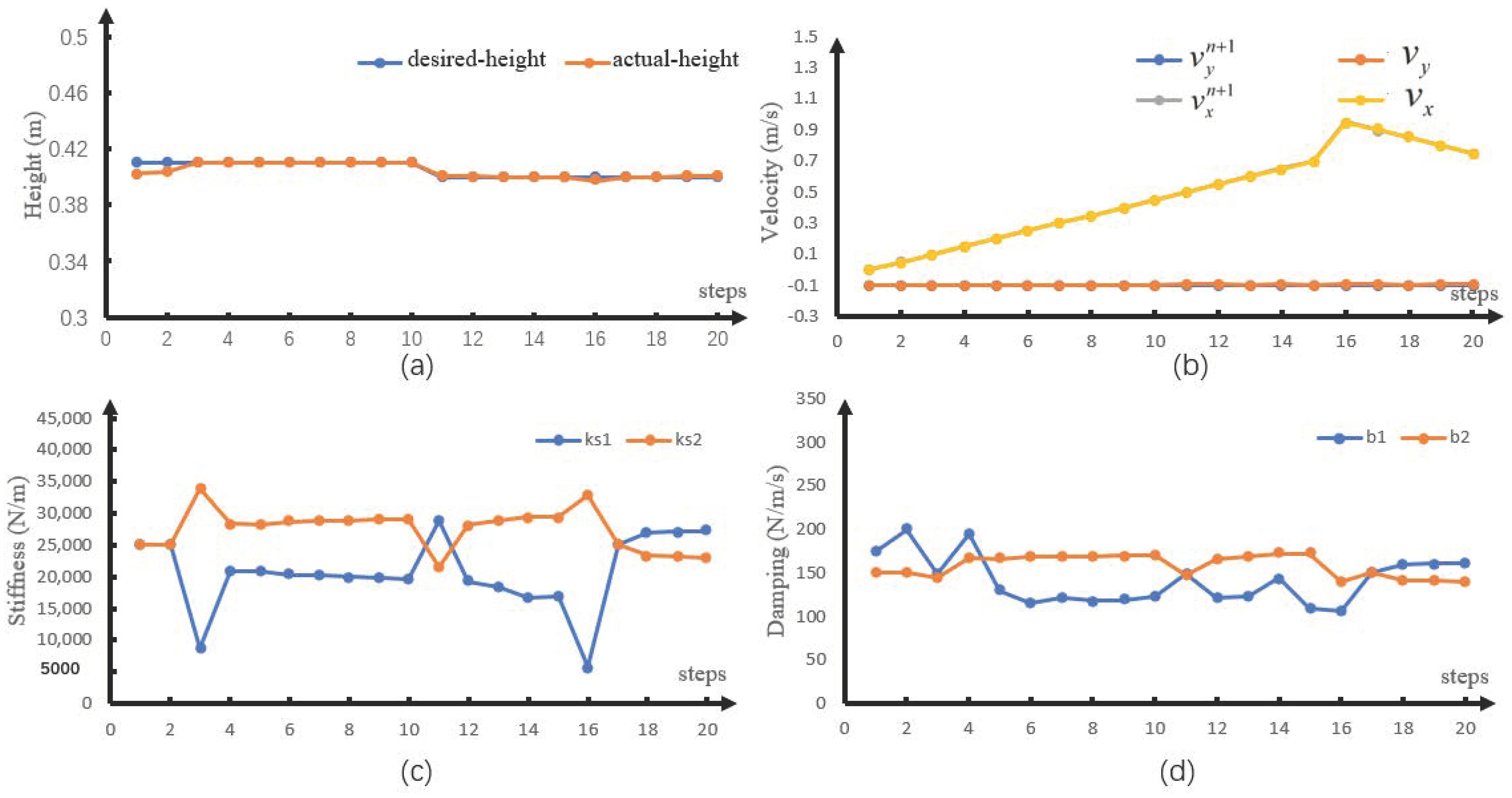
4.1. Simulation
4.2. Experiment
5. Discussion
6. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Blickhan, R. The spring-mass model for running and hopping. J. Biomech. 1989, 22, 1217–1227. [Google Scholar] [CrossRef]
- Hong, H.; Kim, S.; Kim, C.; Lee, S.; Park, S. Spring-like gait mechanics observed during walking in both young and older adults. J. Biomech. 2013, 46, 77–82. [Google Scholar] [CrossRef]
- O’Neill, M.C.; Schmitt, D. The gaits of primates: Center of mass mechanics in walking, cantering and galloping ring-tailed lemurs, Lemur Catta. J. Exp. Biol. 2012, 215, 1728–1739. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Geyer, H.; Seyfarth, A.; Blickhan, R. Compliant leg behaviour explains basic dynamics of walking and running. Proc. R. Soc. B Biol. Sci. 2006, 273, 2861–2867. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Raibert, M.H.; Hodgins, J.K. Animation of dynamic legged locomotion. In Proceedings of the ACM SIGGRAPH Computer Graphics, Las Vegas, NV, USA, 28 July–2 August 1991; ACM: New York, NY, USA, 1991; Volume 25, No. 4. pp. 349–358. [Google Scholar]
- Saranli, U. Rhex: A simple and highly mobile hexapod robot. Int. J. Robot. Res. 2001, 20, 616–631. [Google Scholar] [CrossRef] [Green Version]
- Koepl, D.; Hurst, J. Impulse control for planar spring-mass running. J. Intell. Robot. Syst. 2014, 74, 589–603. [Google Scholar] [CrossRef]
- Blackman, D.J.; Nicholson, J.V.; Ordonez, C.; Miller, B.D.; Clark, J.E. Gait development on minitaur, a direct drive quadrupedal robot. In Proceedings of the Unmanned Systems Technology XVIII, Baltimore, MD, USA, 20–21 April 2016; International Society for Optics and Photonics: Bellingham, WA, USA, 2016; Volume 9837, p. 98370I. [Google Scholar]
- Rummel, J.; Blum, Y.; Maus, H.M.; Rode, C.; Seyfarth, A. Stable and robust walking with compliant legs. In Proceedings of the 2010 IEEE International Conference on Robotics and Automation, Anchorage, AK, USA, 3–7 May 2010; IEEE: Piscataway, NJ, USA, 2010; pp. 5250–5255. [Google Scholar]
- Rezazadeh, S.; Hurst, J.W. Toward step-by-step synthesis of stable gaits for underactuated compliant legged robots. In Proceedings of the 2015 IEEE International Conference on Robotics and Automation (ICRA), Seattle, WA, USA, 26–30 May 2015; IEEE: Piscataway, NJ, USA, 2015; pp. 4532–4538. [Google Scholar]
- Schwind, W.J.; Koditschek, D.E. Control of forward velocity for a simplified planar hopping robot. In Proceedings of the 1995 IEEE International Conference on Robotics and Automation, Nagoya, Aichi, Japan, 21–27 May 1995; IEEE: Piscataway, NJ, USA, 1995; Volume 1, pp. 691–696. [Google Scholar]
- Andrews, B.; Miller, B.; Schmitt, J.; Clark, J.E. Running over unknown rough terrain with a one-legged planar robot. Bioinspir. Biomim. 2011, 6, 026009. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Schmitt, J. A simple stabilizing control for sagittal plane locomotion. J. Comput. Nonlinear Dyn. 2006, 1, 348–357. [Google Scholar] [CrossRef]
- Schmitt, J.; Clark, J. Modeling posture-dependent leg actuation in sagittal plane locomotion. Bioinspir. Biomim. 2009, 4, 046005. [Google Scholar] [CrossRef] [PubMed]
- Wu, A.; Geyer, H. The 3-D spring–mass model reveals a time-based deadbeat control for highly robust running and steering in uncertain environments. IEEE Trans. Robot. 2013, 29, 1114–1124. [Google Scholar] [CrossRef]
- Jafarian, M.; van Oort, G.; Carloni, R.; Stramigioli, S. Performance comparison of a planar bipedal robot with rigid and compliant legs. IFAC Proc. Vol. 2011, 44, 6924–6929. [Google Scholar] [CrossRef]
- Ghorbani, R. On Controllable Stiffness Bipedal Walking. Ph.D. Thesis, The University of Manitoba, Winnipeg, MB, Canada, 2008. [Google Scholar]
- Wensing, P.M.; Orin, D.E. High-speed humanoid running through control with a 3D-SLIP model. In Proceedings of the 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems, Tokyo, Japan, 3–7 November 2013; IEEE: Piscataway, NJ, USA, 2013; pp. 5134–5140. [Google Scholar]
- Liu, Y.; Wensing, P.M.; Orin, D.E.; Zheng, Y.F. Dynamic walking in a humanoid robot based on a 3D actuated Dual-SLIP model. In Proceedings of the 2015 IEEE International Conference on Robotics and Automation (ICRA), Seattle, WA, USA, 26–30 May 2015; IEEE: Piscataway, NJ, USA, 2015; pp. 5710–5717. [Google Scholar]
- Khatib, O. A unified approach for motion and force control of robot manipulators: The operational space formulation. IEEE J. Robot. Autom. 1987, 3, 43–53. [Google Scholar] [CrossRef] [Green Version]
- Hutter, M.; Hoepflinger, M.A.; Gehring, C.; Bloesch, M.; Remy, C.D.; Siegwart, R. Hybrid operational space control for compliant legged systems. In Robotics; MIT Press: Cambridge, MA, USA, 2013; pp. 129–136. [Google Scholar]
- Feng, S.; Whitman, E.; Xinjilefu, X.; Atkeson, C.G. Optimization-based full body control for the darpa robotics challenge. J. Field Robot. 2015, 32, 293–312. [Google Scholar] [CrossRef] [Green Version]
- Dai, H.; Valenzuela, A.; Tedrake, R. Whole-body motion planning with centroidal dynamics and full kinematics. In Proceedings of the 2014 IEEE-RAS International Conference on Humanoid Robots, Madrid, Spain, 18–20 November 2014; IEEE: Piscataway, NJ, USA, 2014; pp. 295–302. [Google Scholar]
- Kanoun, O.; Lamiraux, F.; Wieber, P.B. Kinematic control of redundant manipulators: Generalizing the task-priority framework to inequality task. IEEE Trans. Robot. 2011, 27, 785–792. [Google Scholar] [CrossRef] [Green Version]
- Vejdani, H.R.; Wu, A.; Geyer, H.; Hurst, J.W. Touch-down angle control for spring-mass walking. In Proceedings of the IEEE International Conference on Robotics and Automation, Seattle, WA, USA, 26–30 May 2015; pp. 5101–5106. [Google Scholar]
- Su, H.; Mariani, A.; Ovur, S.E.; Menciassi, A.; Momi, E.D. Toward teaching by demonstration for robot-assisted minimally invasive surgery. IEEE Trans. Autom. Sci. Eng. 2021, 1–11. [Google Scholar] [CrossRef]
- Su, H.; Qi, W.; Hu, Y.; Karimi, H.R.; Ferrigno, G.; De Momi, E. An incremental learning framework for human-like redundancy optimization of anthropomorphic manipulators. IEEE Trans. Ind. Inform. 2020. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Priority | Description | ||
|---|---|---|---|
| 1 | Dynamic | , | , |
| 2 | contact | , | , |
| 3 | CoM | , | , |
| 4 | Swing foot, posture | , , | , , |
| Description | Value |
|---|---|
| 2.088 kg | |
| 1.064 kg | |
| 0.329 kg | |
| 0.0044 kg·m² | |
| 0.0038 kg·m² | |
| 0.0028 kg·m² | |
| 0.152 m | |
| 0.25 m | |
| 0.25 m |
| Description | Value |
|---|---|
| 0.45 m | |
| 0.3 s | |
| [,,] | [0.12,0.2,0.1] |
| [,] | [[1000,700], [40,65]] |
| [,] | [[600,600], [35,35]] |
| [,] | [50,5.5] |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shi, X.; Gao, J.; Lu, Y.; Tian, D.; Liu, Y. Biped Walking Based on Stiffness Optimization and Hierarchical Quadratic Programming. Sensors 2021, 21, 1696. https://doi.org/10.3390/s21051696
Shi X, Gao J, Lu Y, Tian D, Liu Y. Biped Walking Based on Stiffness Optimization and Hierarchical Quadratic Programming. Sensors. 2021; 21(5):1696. https://doi.org/10.3390/s21051696
Chicago/Turabian StyleShi, Xuanyang, Junyao Gao, Yizhou Lu, Dingkui Tian, and Yi Liu. 2021. "Biped Walking Based on Stiffness Optimization and Hierarchical Quadratic Programming" Sensors 21, no. 5: 1696. https://doi.org/10.3390/s21051696
APA StyleShi, X., Gao, J., Lu, Y., Tian, D., & Liu, Y. (2021). Biped Walking Based on Stiffness Optimization and Hierarchical Quadratic Programming. Sensors, 21(5), 1696. https://doi.org/10.3390/s21051696