
Comparing Kriging Estimators Using Weather Station Data and Local Greenhouse Sensors


Abstract
:1. Introduction
2. Literature Review
3. Data and Methods
3.1. Study Area & Study Data
3.2. Spatio-Temporal Kriging
3.3. Data Preprocessing
3.4. Comparison
4. Results
4.1. Cross-Validation Results
4.2. Comparison Result
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Pathak, T.B.; Maskey, M.L.; Dahlberg, J.A.; Kearns, F.; Bali, K.M.; Zaccaria, D. Climate change trends and impacts on California Agriculture: A detailed review. Agronomy 2018, 8, 1–27. [Google Scholar] [CrossRef] [Green Version]
- Malla, G. Climate change and its impact on Nepalese agriculture. J. Agric. Environ. 2008, 9, 62–71. [Google Scholar] [CrossRef] [Green Version]
- van Zoest, V.; Osei, F.B.; Hoek, G.; Stein, A. Spatio-temporal regression kriging for modelling urban NO2 concentrations. Int. J. Geogr. Inf. Sci. 2020, 34, 851–865. [Google Scholar] [CrossRef] [Green Version]
- Oktavia, E.; Mustika, I.W. Inverse distance weighting and kriging spatial interpolation for data center thermal monitoring. In Proceedings of the 2016 1st International Conference on Information Technology, Information Systems and Electrical Engineering (ICITISEE), Yogyakarta, Indonesia, 23–24 August 2016; pp. 69–74. [Google Scholar]
- Lu, G.Y.; Wong, D.W. An adaptive inverse-distance weighting spatial interpolation technique. Comput. Geosci. 2008, 34, 1044–1055. [Google Scholar] [CrossRef]
- Matheron, G. Principles of geostatistics. Econ. Geol. 1963, 58, 1246–1266. [Google Scholar] [CrossRef]
- Zhang, J.; Li, X.; Yang, R.; Liu, Q.; Zhao, L.; Dou, B. An extended kriging method to interpolate near-surface soil moisture data measured by wireless sensor networks. Sensors 2017, 17, 1390. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Li, C.; Lu, Z.; Ma, T.; Zhu, X. A simple kriging method incorporating multiscale measurements in geochemical survey. J. Geochem. Explor. 2009, 101, 147–154. [Google Scholar] [CrossRef]
- Oliver, M.A.; Webster, R. Kriging: A method of interpolation for geographical information systems. Int. J. Geogr. Inf. Syst. 1990, 4, 313–332. [Google Scholar] [CrossRef]
- Wu, T.; Li, Y. Spatial interpolation of temperature in the United States using residual kriging. Appl. Geogr. 2013, 44, 112–120. [Google Scholar] [CrossRef]
- Liang, X.; Schilling, K.; Zhang, Y.-K.; Jones, C. Co-Kriging Estimation of Nitrate-Nitrogen Loads in an Agricultural River. Water Resour. Manag. 2016, 30, 1771–1784. [Google Scholar] [CrossRef]
- Appelhans, T.; Mwangomo, E.; Hardy, D.R.; Hemp, A.; Nauss, T. Evaluating machine learning approaches for the interpolation of monthly air temperature at Mt. Kilimanjaro, Tanzania. Spat. Stat. 2015, 14, 91–113. [Google Scholar] [CrossRef] [Green Version]
- Sha, L. Geostatistical space-time modeling for temperature estimation. In Proceedings of the 2012 First International Conference on Agro-Geoinformatics (Agro-Geoinformatics), Shanghai, China, 2–4 August 2012; pp. 1–5. [Google Scholar]
- Pebesma, E.; Heuvelink, G. Spatio-temporal interpolation using gstat. RFID J. 2016, 8, 204–218. [Google Scholar]
- Pahuja, R.; Verma, H.K.; Uddin, M. A wireless sensor network for greenhouse climate control. IEEE Pervasive Comput. 2013, 12, 49–58. [Google Scholar] [CrossRef]
- Mcbratney, A.B.; Webster, R. Choosing functions for semi-variograms of soil properties and fitting them to sampling estimates. J. Soil Sci. 1986, 37, 617–639. [Google Scholar] [CrossRef]
- Mercer, L.D.; Szpiro, A.A.; Sheppard, L.; Lindström, J.; Adar, S.D.; Allen, R.W.; Avol, E.L.; Oron, A.P.; Larson, T.; Liu, L.J.; et al. Comparing universal kriging and land-use regression for predicting concentrations of gaseous oxides of nitrogen (NOx) for the Multi-Ethnic Study of Atherosclerosis and Air Pollution (MESA Air). Atmos. Environ. 2011, 45, 4412–4420. [Google Scholar] [CrossRef] [PubMed] [Green Version]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Station | Date | Obs Time | StnPres | Temperature | T.Max | T.Min | RH | WS | Precp | SunShine |
|---|---|---|---|---|---|---|---|---|---|---|
| 467490 | 6/14/2020 | 16 | 1002.2 | 26.1 | 34.1 | 24.4 | 85 | 0.6 | 32 | 0.0 |
| 467770 | 6/14/2020 | 9 | 1008.9 | 30.7 | 32.4 | 27.1 | 70 | 4.3 | 0.0 | 1.0 |
| C0F000 | 6/14/2020 | 4 | 976.3 | 24.7 | 33.0 | 24.3 | 100 | 0.0 | 0.0 | ... |
| C0F850 | 6/14/2020 | 11 | 969.5 | 30.5 | 32.4 | 23.0 | 61 | 3.2 | 0.0 | ... |
| C0F861 | 6/14/2020 | 23 | 786.0 | 16.1 | 24.5 | 13.6 | 100 | 0.0 | 0.0 | … |
| C0F930 | 6/14/2020 | 01 | 998.9 | 28.2 | 35.1 | 26.7 | 94 | 0.4 | 0.0 | ... |
| C0F970 | 6/14/2020 | 17 | 994.9 | 27.0 | 33.6 | 25.2 | 90 | 1.6 | 0.5 | ... |
| C0F9A0 | 6/14/2020 | 4 | 963.2 | 24.9 | 34.8 | 23.4 | 85 | 0.5 | 0.0 | ... |
| C0F9I0 | 6/14/2020 | 1 | 988.4 | 27.1 | 32.5 | 25.6 | 86 | 1.3 | 0.0 | ... |
| C0F9L0 | 6/14/2020 | 18 | 983.6 | 26.6 | 33.1 | 25.9 | 99 | 0.5 | 13.0 | ... |
| C0F9M0 | 6/14/2020 | 7 | 985.3 | 28.8 | 33.0 | 25.8 | 67 | 0.6 | 0.0 | ... |
| C0F9N0 | 6/14/2020 | 24 | 1005.9 | 26.9 | 35.7 | 25.7 | 90 | 1.4 | 0.0 | ... |
| C0F9O0 | 6/14/2020 | 23 | 994.2 | 27.8 | 35.8 | 27.3 | 81 | 0.0 | 0.0 | ... |
| C0F9Q0 | 6/14/2020 | 1 | 992.8 | 26.4 | 33.8 | 25.0 | 89 | 1.3 | 0.0 | ... |
| C0F9S0 | 6/14/2020 | 2 | 998.8 | 27.6 | 33.9 | 26.0 | 91 | 0.7 | 0.0 | ... |
| C0F9T0 | 6/14/2020 | 10 | 1000 | 32.1 | 33.7 | 26.5 | 61 | 1.7 | 0.0 | … |
| C0F9U0 | 6/14/2020 | 10 | 1004.6 | 32.7 | 34.4 | 26.6 | 61 | 2.0 | 0.0 | ... |
| C0F9V0 | 6/14/2020 | 6 | 954.2 | 25.2 | 32.6 | 23.5 | 82 | 1.0 | 0.0 | ... |
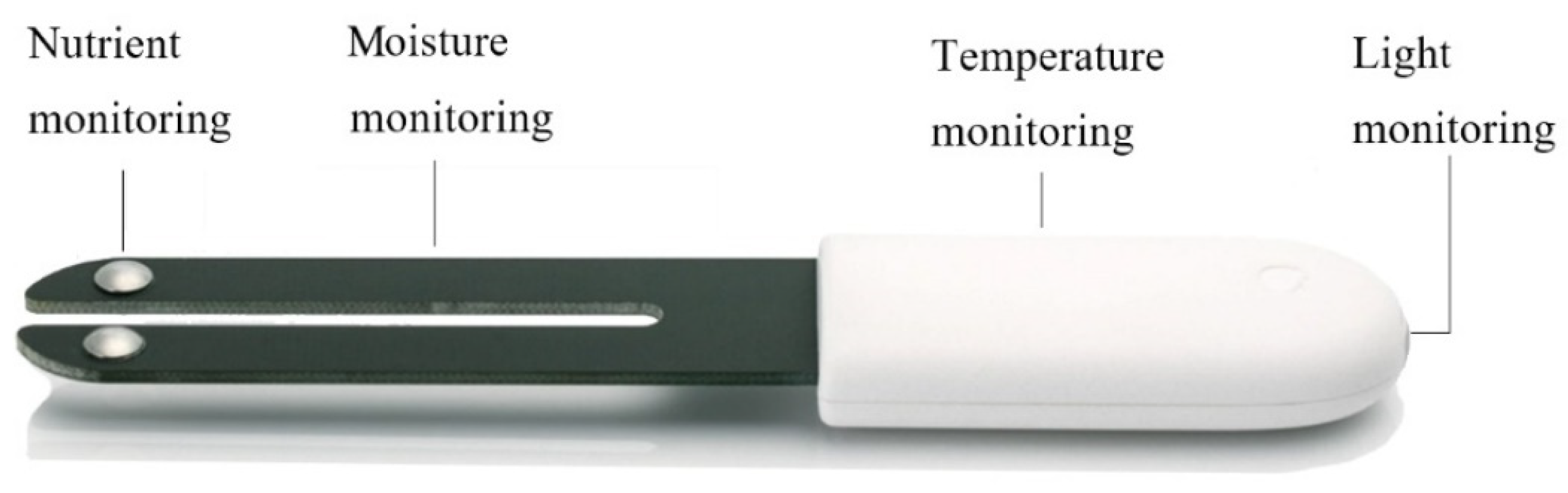
| Size | 120.5 mm × 24.5 mm × 12.5 mm |
|---|---|
| Wireless Connection | Bluetooth 4.1 BLE |
| Operating Voltage | 3 V |
| Battery | CR2032 button cell battery |
| June 14th—20th | September 14th—20th | |||||
|---|---|---|---|---|---|---|
| CWB | Sensor | bs34 | CWB | Sensor | bs34 | |
| Min. | 12.6 | 20.59 | 21.12 | 12.1 | 20.6 | 21.19 |
| Q1 | 26.6 | 22.76 | 22.85 | 26.5 | 23 | 22.98 |
| Median | 28.6 | 23.93 | 23.72 | 28.3 | 24.51 | 24.12 |
| Mean | 28.23 | 26.04 | 26.05 | 28.11 | 26.314 | 25.86 |
| Q3 | 30.8 | 30.00 | 30.16 | 30.5 | 30.31 | 29.57 |
| Max. | 35.7 | 37.81 | 34.06 | 35.7 | 35.03 | 32.77 |
| Stdv | 3.68 | 3.73 | 3.83 | 3.79 | 2.85 | 3.21 |
| RMSE | MAE | |||
|---|---|---|---|---|
| Date | CWB | Sensors | CWB | Sensors |
| June 14th—20th | 3.01 | 1.10 | 2.63 | 0.47 |
| September 14th—20th | 2.66 | 1.87 | 2.26 | 1.72 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kuo, P.-F.; Huang, T.-E.; Putra, I.G.B. Comparing Kriging Estimators Using Weather Station Data and Local Greenhouse Sensors. Sensors 2021, 21, 1853. https://doi.org/10.3390/s21051853
Kuo P-F, Huang T-E, Putra IGB. Comparing Kriging Estimators Using Weather Station Data and Local Greenhouse Sensors. Sensors. 2021; 21(5):1853. https://doi.org/10.3390/s21051853
Chicago/Turabian StyleKuo, Pei-Fen, Tzu-En Huang, and I Gede Brawiswa Putra. 2021. "Comparing Kriging Estimators Using Weather Station Data and Local Greenhouse Sensors" Sensors 21, no. 5: 1853. https://doi.org/10.3390/s21051853
APA StyleKuo, P. -F., Huang, T. -E., & Putra, I. G. B. (2021). Comparing Kriging Estimators Using Weather Station Data and Local Greenhouse Sensors. Sensors, 21(5), 1853. https://doi.org/10.3390/s21051853