
Benefits of Spectral Property Engineering in Distributed Brillouin Fiber Sensing



Abstract
:1. Introduction
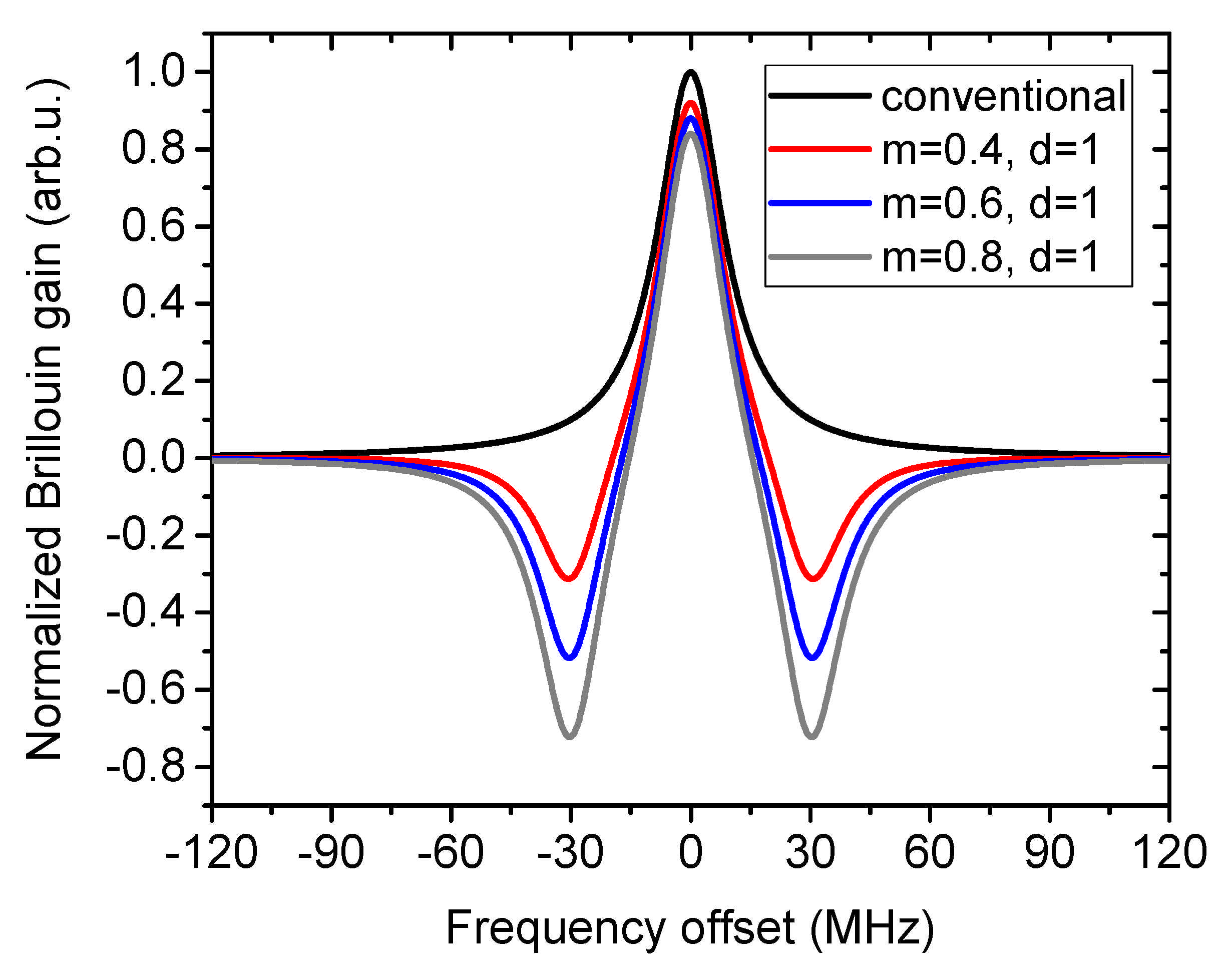
2. Engineering of the Spectral Properties of Brillouin Scattering
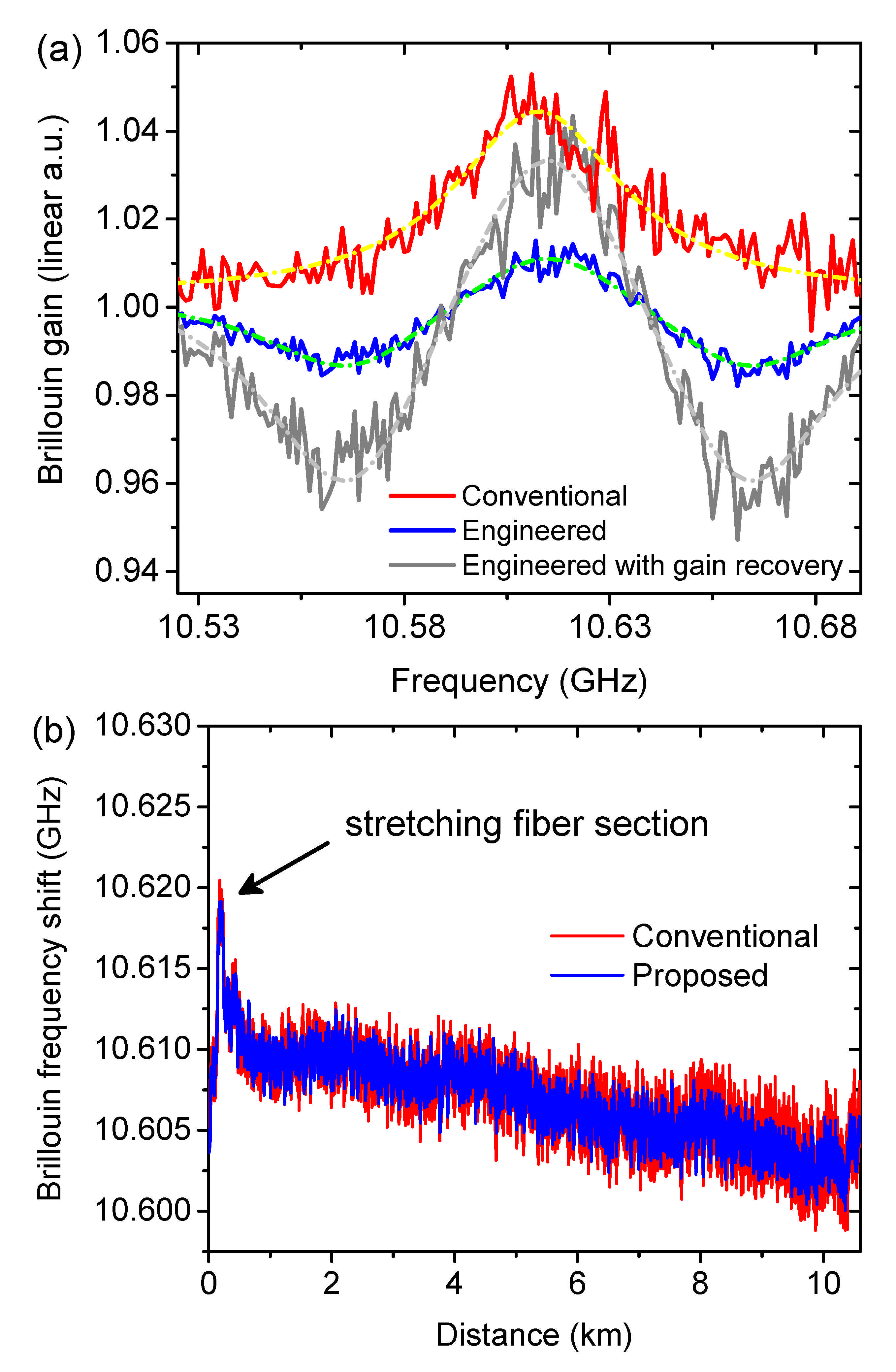
3. Benefits of Brillouin Spectral Property Engineering in Static Distributed Sensing
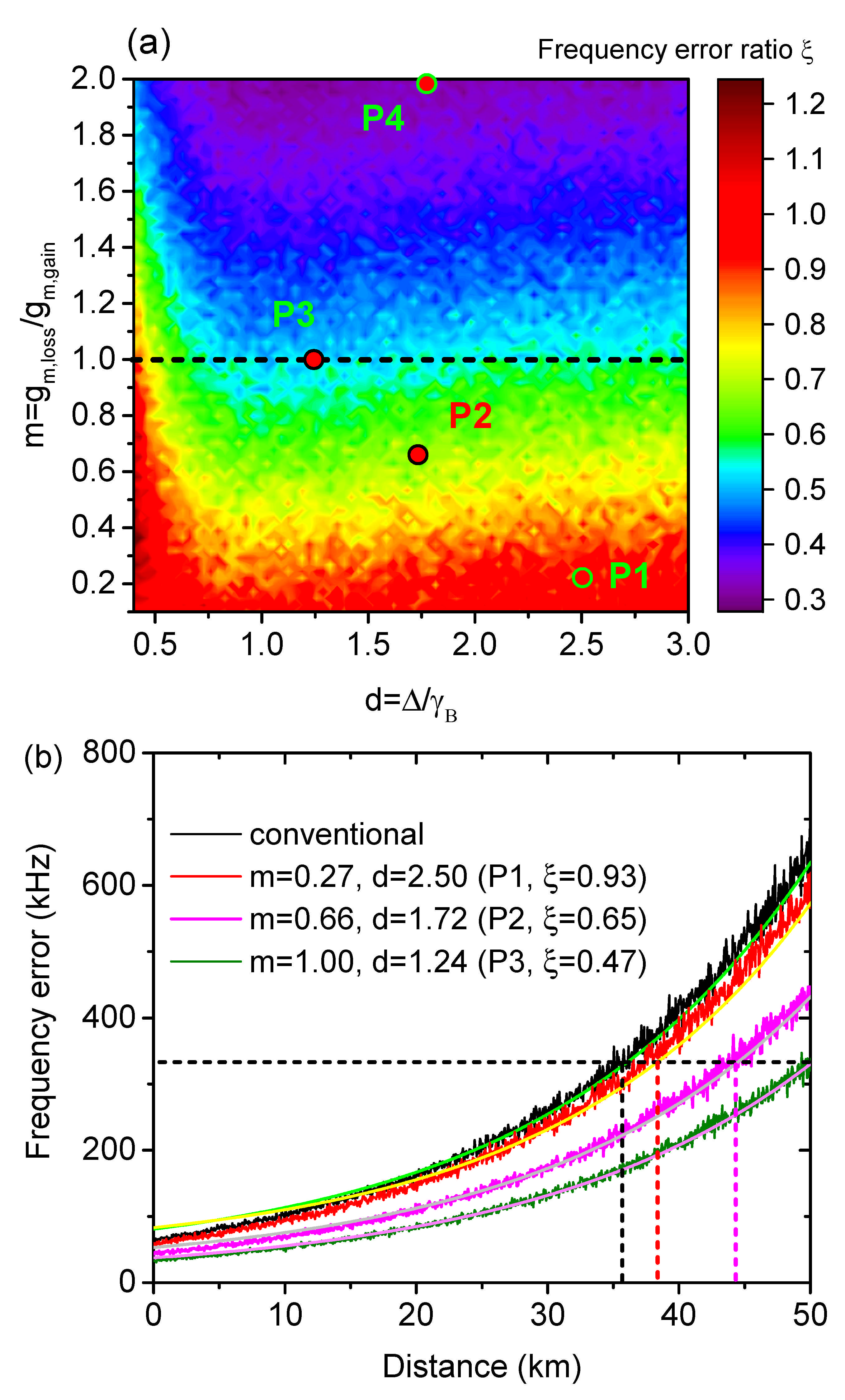
3.1. Simulation
3.2. Implementation
3.2.1. Post-Superposition Scheme
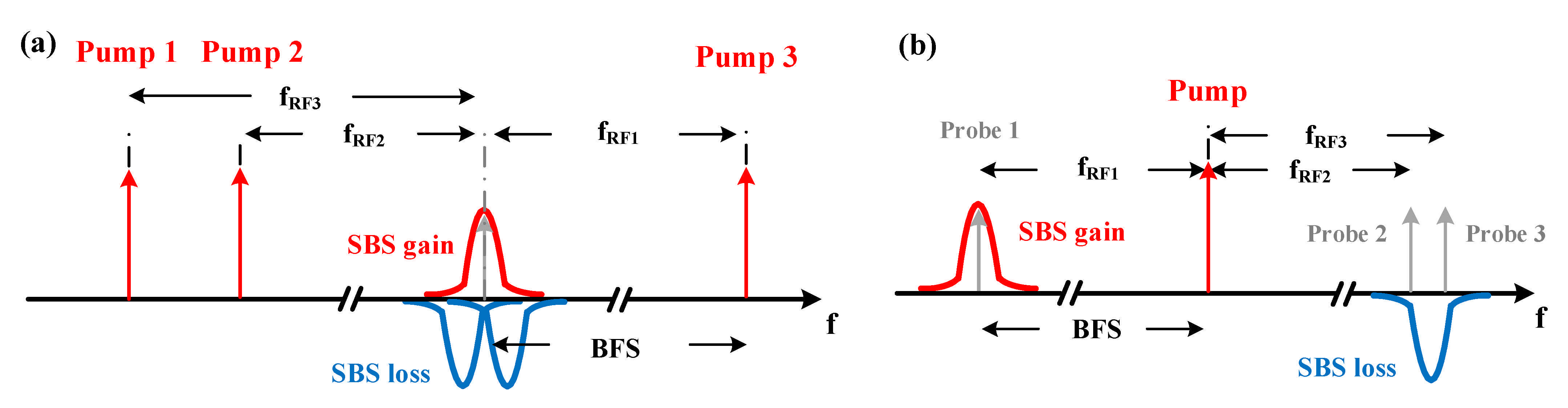
3.2.2. Multi-Pump Wave Scheme
3.2.3. Multi-Probe Wave Scheme
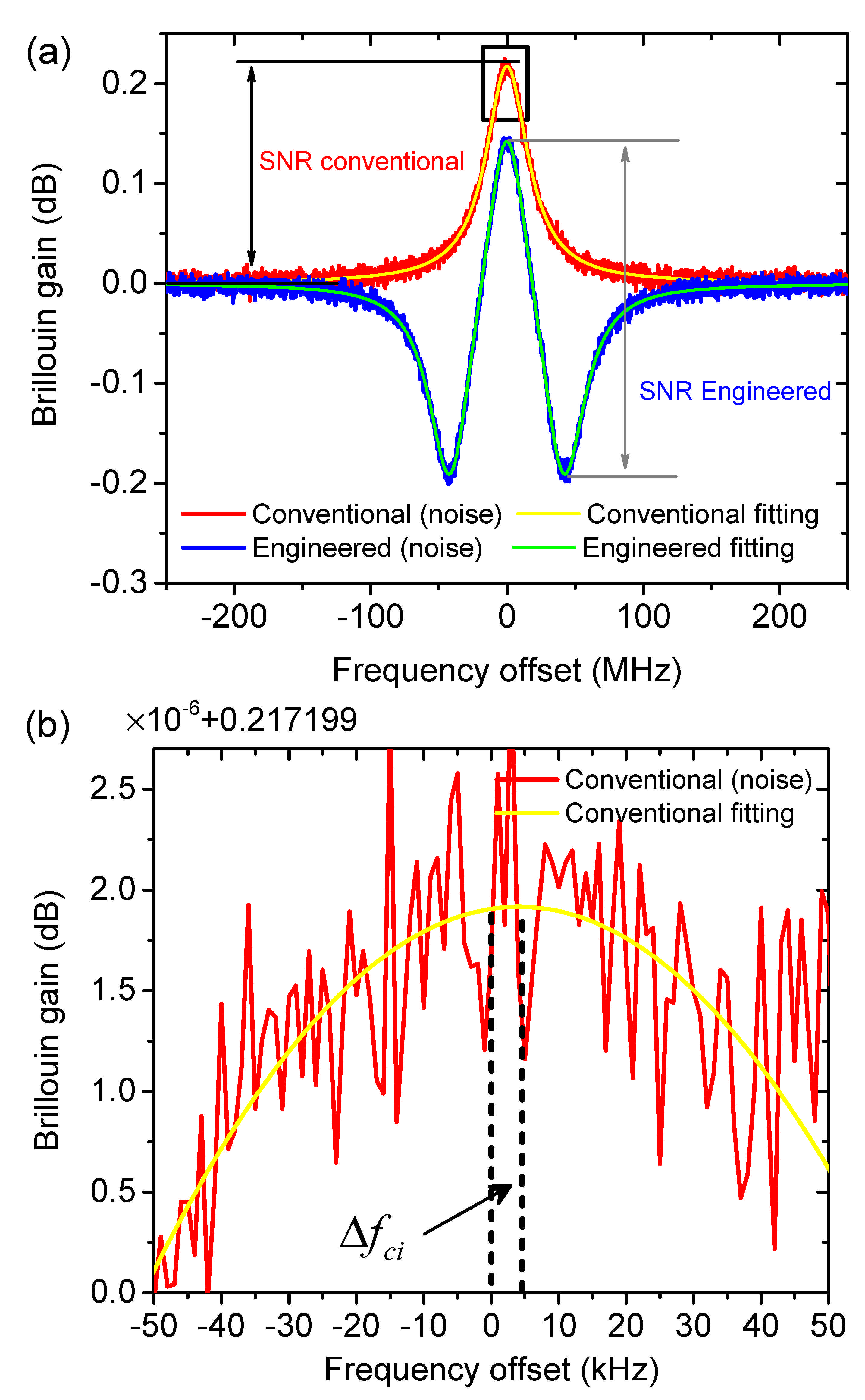
3.3. Results
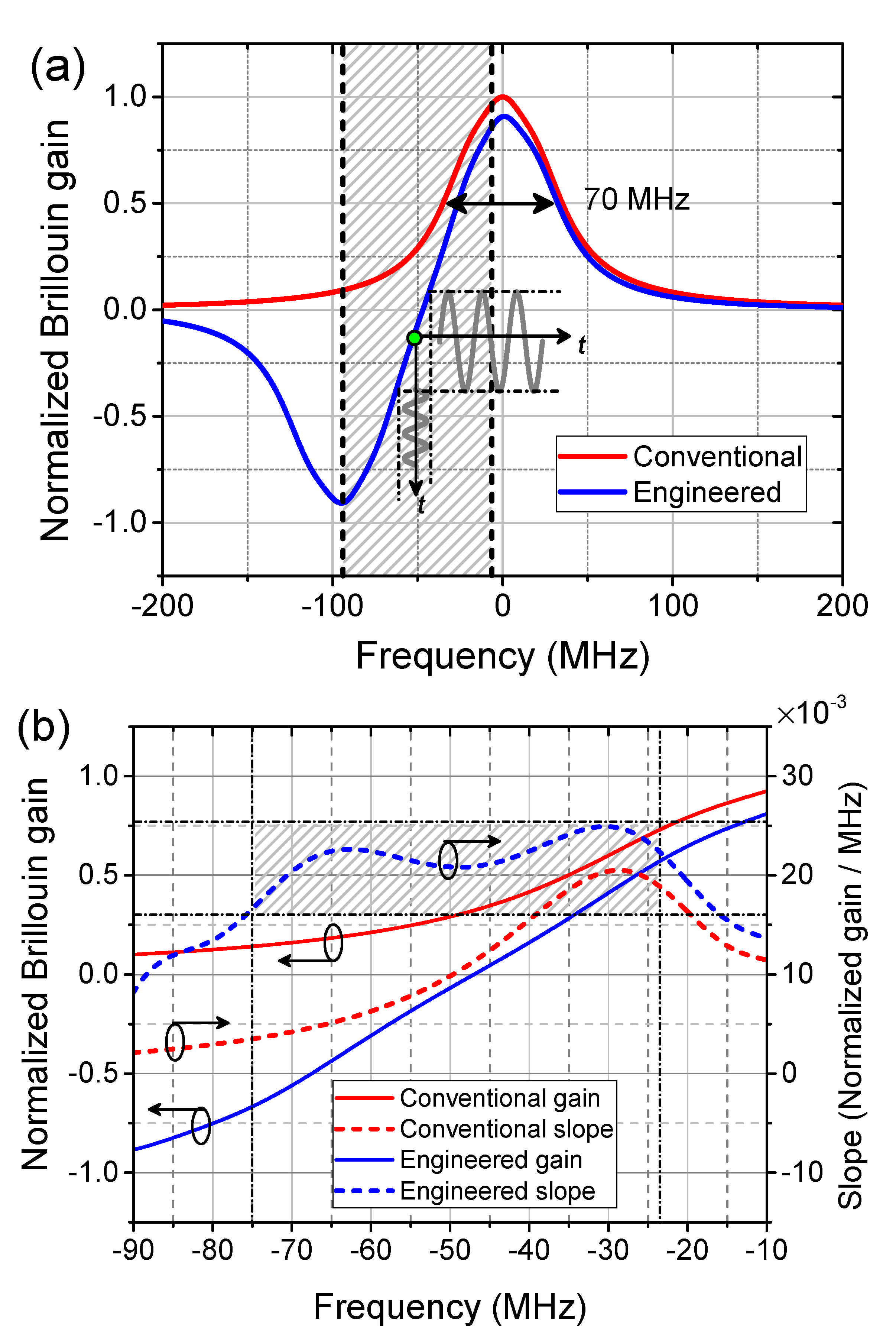
4. Benefits of Brillouin Spectral Property Engineering in Dynamic Distributed Sensing
4.1. Theory
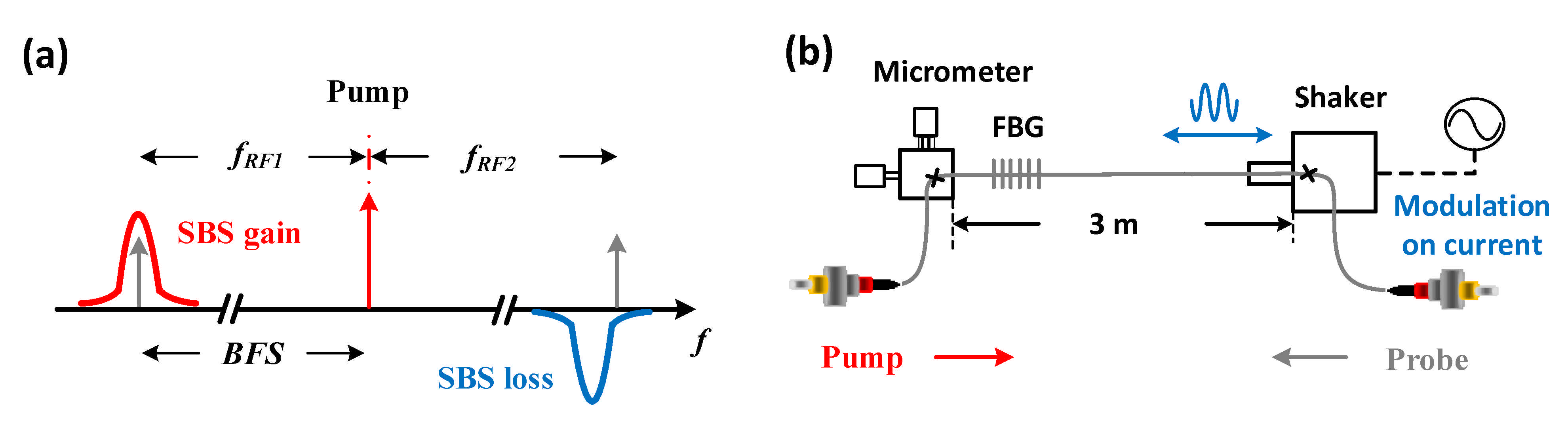
4.2. Experimental Implementation and Results
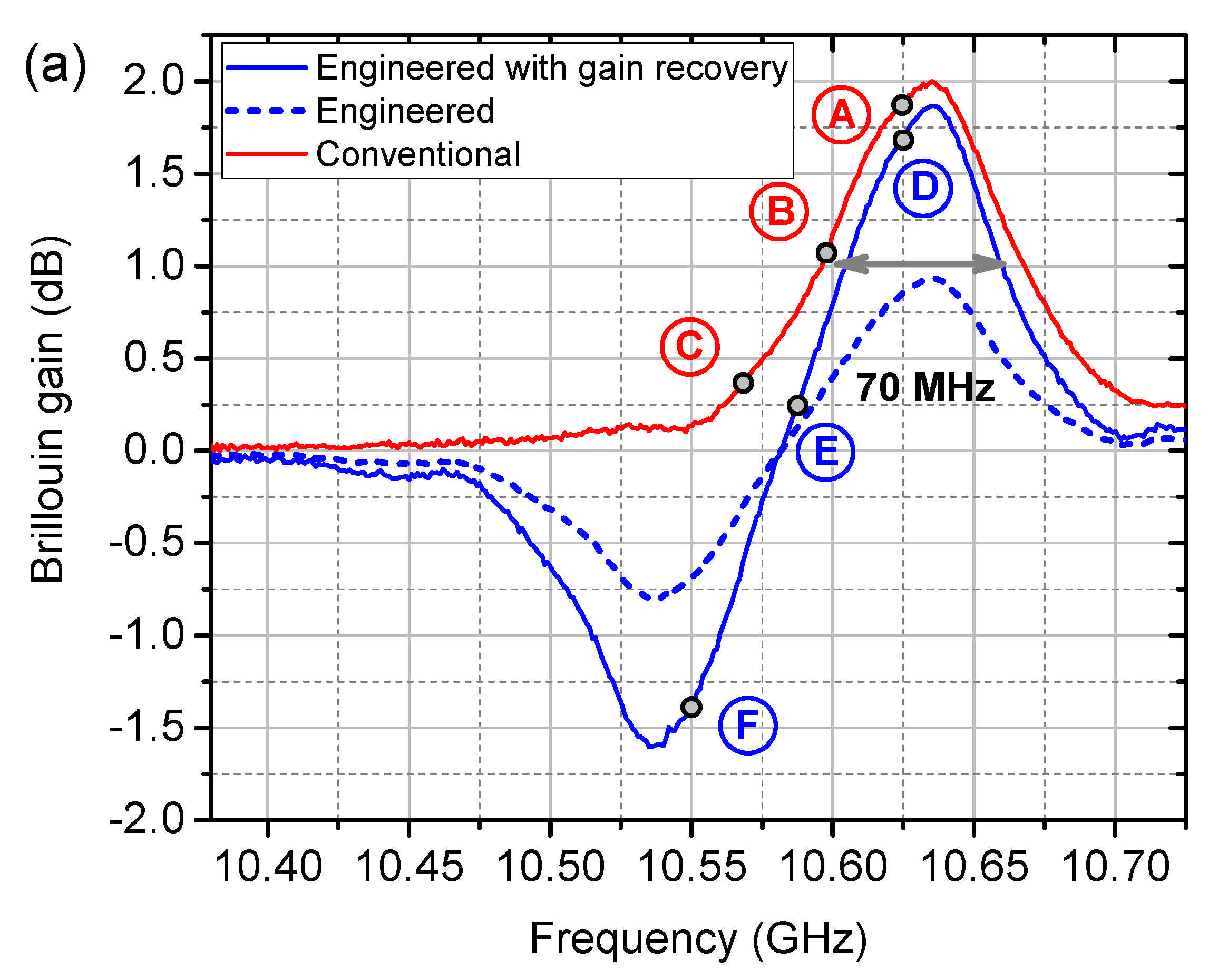
5. Gain Penalty and Recovery
6. Summary
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Kersey, A.D.; Davis, M.A.; Patrick, H.J.; LeBlanc, M.; Koo, K.P.; Askins, C.G.; Putnam, M.A.; Friebele, E.J. Fiber grating sensors. J. Light. Technol. 1997, 15, 1442–1463. [Google Scholar] [CrossRef] [Green Version]
- Galindez-Jamioy, C.A.; López-Higuera, J.M. Brillouin Distributed Fiber Sensors: An Overview and Applications. J. Sens. 2012, 2012, 204121. [Google Scholar] [CrossRef] [Green Version]
- Feng, C.; Emad Kadum, J.; Schneider, T. The State-of-the-Art of Brillouin Distributed Fiber Sensing. In Fiber Optic Sensing—Principle, Measurement and Applications; IntechOpen: London, UK, 2019. [Google Scholar] [CrossRef] [Green Version]
- Motil, A.; Bergman, A.; Tur, M. [INVITED] State of the art of Brillouin fiber-optic distributed sensing. Opt. Laser Technol. 2016, 78, 81–103. [Google Scholar] [CrossRef]
- Kurashima, T.; Horiguchi, T.; Tateda, M. Distributed-temperature sensing using stimulated Brillouin scattering in optical silica fibers. Opt. Lett. 1990, 15, 1038–1040. [Google Scholar] [CrossRef]
- Horiguchi, T.; Kurashima, T.; Tateda, M. Tensile strain dependence of Brillouin frequency shift in silica optical fibers. IEEE Photonics Technol. Lett. 1989, 1, 107–108. [Google Scholar] [CrossRef]
- Feng, C. Spectrum Engineering of Stimulated Brillouin Scattering in Distributed Fiber Sensing and Optical Signal Processing; Cuvillier Verlag: Göttingen, Germany, 2020. [Google Scholar]
- Alem, M.; Soto, M.A.; Thévenaz, L. Analytical model and experimental verification of the critical power for modulation instability in optical fibers. Opt. Express 2015, 23, 29514–29532. [Google Scholar] [CrossRef] [Green Version]
- Thévenaz, L.; Mafang, S.F.; Lin, J. Effect of pulse depletion in a Brillouin optical time-domain analysis system. Opt. Express 2013, 21, 14017–14035. [Google Scholar] [CrossRef] [PubMed]
- Iribas, H.; Urricelqui, J.; Mompó, J.J.; Mariñelarena, J.; Loayssa, A. Non-Local Effects in Brillouin Optical Time-Domain Analysis Sensors. Appl. Sci. 2017, 7, 761. [Google Scholar] [CrossRef] [Green Version]
- Dominguez-Lopez, A.; Angulo-Vinuesa, X.; Lopez-Gil, A.; Martin-Lopez, S.; Gonzalez-Herraez, M. Non-local effects in dual-probe-sideband Brillouin optical time domain analysis. Opt. Express 2015, 23, 10341–10352. [Google Scholar] [CrossRef] [Green Version]
- Zornoza, A.; Sagues, M.; Loayssa, A. Self-heterodyne detection for SNR improvement and distributed phase-shift measurements in BOTDA. J. Light. Technol. 2012, 30, 1066–1072. [Google Scholar] [CrossRef]
- Kadum, J.E.; Feng, C.; Schneider, T. Characterization of the Noise Induced by Stimulated Brillouin Scattering in Distributed Sensing. Sensors 2020, 20, 4311. [Google Scholar] [CrossRef] [PubMed]
- Kadum, J.; Feng, C.; Schneider, T. Investigation on the excess noise in Brillouin optical time domain analysis due to stimulated Brillouin scattering. In Proceedings of the Terahertz, RF, Millimeter, and Submillimeter-Wave Technology and Applications XIII, San Francisco, CA, USA, 1–6 February 2020; p. 112791W. [Google Scholar] [CrossRef]
- Farahani, M.A.; Castillo-Guerra, E.; Colpitts, B.G. Accurate estimation of Brillouin frequency shift in Brillouin optical time domain analysis sensors using cross correlation. Opt. Lett. 2011, 36, 4275–4277. [Google Scholar] [CrossRef] [PubMed]
- Haneef, S.M.; Yang, Z.; Thévenaz, L.; Venkitesh, D.; Srinivasan, B. Performance analysis of frequency shift estimation techniques in Brillouin distributed fiber sensors. Opt. Express 2018, 26, 14661–14677. [Google Scholar] [CrossRef] [Green Version]
- Lin, W.; Yang, Z.; Hong, X.; Wang, S.; Wu, J. Brillouin gain bandwidth reduction in Brillouin optical time domain analyzers. Opt. Express 2017, 25, 7604–7615. [Google Scholar] [CrossRef]
- Peled, Y.; Motil, A.; Tur, M. Fast Brillouin optical time domain analysis for dynamic sensing. Opt. Express 2012, 20, 8584–8591. [Google Scholar] [CrossRef] [PubMed]
- Voskoboinik, A.; Willner, A.E.; Tur, M. Extending the Dynamic Range of Sweep-Free Brillouin Optical Time-Domain Analyzer. J. Light. Technol. 2015, 33, 2978–2985. [Google Scholar] [CrossRef]
- Voskoboinik, A.; Wang, J.; Shamee, B.; Nuccio, S.R.; Zhang, L.; Chitgarha, M.; Willner, A.E.; Tur, M. SBS-Based Fiber Optical Sensing Using Frequency-Domain Simultaneous Tone Interrogation. J. Light. Technol. 2011, 29, 1729–1735. [Google Scholar] [CrossRef]
- Jin, C.; Guo, N.; Feng, Y.; Wang, L.; Liang, H.; Li, J.; Li, Z.; Yu, C.; Lu, C. Scanning-free BOTDA based on ultra-fine digital optical frequency comb. Opt. Express 2015, 23, 5277–5284. [Google Scholar] [CrossRef] [PubMed]
- Voskoboinik, A.; Yilmaz, O.F.; Willner, A.W.; Tur, M. Sweep-free distributed Brillouin time-domain analyzer (SF-BOTDA). Opt. Express 2011, 19, B842–B847. [Google Scholar] [CrossRef]
- Peled, Y.; Motil, A.; Yaron, L.; Tur, M. Slope-assisted fast distributed sensing in optical fibers with arbitrary Brillouin profile. Opt. Express 2011, 19, 19845–19854. [Google Scholar] [CrossRef] [Green Version]
- Bernini, R.; Minardo, A.; Zeni, L. Dynamic strain measurement in optical fibers by stimulated Brillouin scattering. Opt. Lett. 2009, 34, 2613–2615. [Google Scholar] [CrossRef]
- Feng, C.; Mariñelarena, J.; Schneider, T. Investigation on the working point of slope-assisted dynamic Brillouin distributed fiber sensing. In Proceedings of the Seventh European Workshop on Optical Fibre Sensors, Limassol, Cyprus, 28 August 2019; Volume 11199, p. 111991V. [Google Scholar] [CrossRef]
- Motil, A.; Danon, O.; Peled, Y.; Tur, M. Pump-power-independent double slope-assisted distributed and fast Brillouin fiber-optic sensor. IEEE Photonics Technol. Lett. 2014, 26, 797–800. [Google Scholar] [CrossRef]
- Feng, C.; Bhatta, H.D.; Bohbot, J.; Davidi, R.; Lu, X.; Schneider, T.; Tur, M. Gain Spectrum Engineering in Slope-Assisted Dynamic Brillouin Optical Time-Domain Analysis. J. Light. Technol. 2020, 38, 6967–6975. [Google Scholar] [CrossRef]
- Yang, G.; Fan, X.; Wang, B.; He, Z. Enhancing strain dynamic range of slope-assisted BOTDA by manipulating Brillouin gain spectrum shape. Opt. Express 2018, 26, 32599–32607. [Google Scholar] [CrossRef]
- Marinelarena, J.; Urricelqui, J.; Loayssa, A. Enhancement of the Dynamic Range in Slope-Assisted Coherent Brillouin Optical Time-Domain Analysis Sensors. IEEE Photonics J. 2017, 9, 1–10. [Google Scholar] [CrossRef]
- Urricelqui, J.; Zornoza, A.; Sagues, M.; Loayssa, A. Dynamic BOTDA measurements based on Brillouin phase-shift and RF demodulation. Opt. Express 2012, 20, 26942–26949. [Google Scholar] [CrossRef] [PubMed]
- Feng, C.; Lu, X.; Schneider, T. Simultaneous enhancement of dynamic range and sensitivity in slope-assisted Brillouin optical time-domain analyzers via gain spectrum engineering. In Proceedings of the Terahertz, RF, Millimeter, and Submillimeter-Wave Technology and Applications XIII, San Francisco, CA, USA, 1–6 February 2020; p. 112791C. [Google Scholar] [CrossRef]
- Zadok, A.; Eyal, A.; Tur, M. Gigahertz-Wide Optically Reconfigurable Filters Using Stimulated Brillouin Scattering. J. Light. Technol. 2007, 25, 2168–2174. [Google Scholar] [CrossRef]
- Feng, C.; Preussler, S.; Schneider, T. Sharp tunable and additional noise-free optical filter based on Brillouin losses. Photonics Res. 2018, 6, 132–137. [Google Scholar] [CrossRef]
- Stern, Y.; Zhong, K.; Schneider, T.; Zhang, R.; Ben-ezra, Y.; Tur, M.; Zadok, A. Tunable sharp and highly selective microwave-photonic band-pass filters based on stimulated Brillouin scattering. Photonics Res. 2014, 2, 18–25. [Google Scholar] [CrossRef]
- Wei, W.; Yi, L.; Jaouën, Y.; Hu, W. Bandwidth-tunable narrowband rectangular optical filter based on stimulated Brillouin scattering in optical fiber. Opt. Express 2014, 22, 23249–23260. [Google Scholar] [CrossRef]
- Thévenaz, L. Slow and fast light in optical fibres. Nat. Photonics 2008, 2, 474–481. [Google Scholar] [CrossRef] [Green Version]
- Wei, W.; Yi, L.; Jaouën, Y.; Hu, W. Arbitrary-shaped Brillouin microwave photonic filter by manipulating a directly modulated pump. Opt. Lett. 2017, 42, 4083–4086. [Google Scholar] [CrossRef]
- Wei, W.; Yi, L.; Jaouën, Y.; Hu, W. Software-defined microwave photonic filter with high reconfigurable resolution. Sci. Rep. 2016, 6, 1–10. [Google Scholar] [CrossRef] [Green Version]
- Agrawal, G.P. Nonlinear Fiber Optics. In Nonlinear Science at the Dawn of the 21st Century; Christiansen, P.L., Sorensen, M.P., Scott, A.C., Eds.; Springer: Berlin/Heidelberg, Germany, 2000; pp. 195–211. [Google Scholar]
- Schneider, T. Nonlinear Optics in Telecommunications; Advanced Texts in Physics; Springer: Berlin/Heidelberg, Germany, 2004; p. 420. [Google Scholar] [CrossRef]
- Preussler, S.; Schneider, T. Bandwidth reduction in a multistage Brillouin system. Opt. Lett. 2012, 37, 4122–4124. [Google Scholar] [CrossRef]
- Wiatrek, A.; Preußler, S.; Jamshidi, K.; Schneider, T. Frequency domain aperture for the gain bandwidth reduction of stimulated Brillouin scattering. Opt. Lett. 2012, 37, 930–932. [Google Scholar] [CrossRef]
- Preussler, S.; Wiatrek, A.; Jamshidi, K.; Schneider, T. Brillouin scattering gain bandwidth reduction down to 3.4 MHz. Opt. Express 2011, 19, 8565–8570. [Google Scholar] [CrossRef]
- Wei, W.; Yi, L.; Jaouen, Y.; Morvan, M.; Hu, W. Brillouin Rectangular Optical Filter with Improved Selectivity and Noise Performance. IEEE Photonics Technol. Lett. 2015, 27, 1593–1596. [Google Scholar] [CrossRef] [Green Version]
- Kovalev, V.I.; Harrison, R.G. Observation of Inhomogeneous Spectral Broadening of Stimulated Brillouin Scattering in an Optical Fiber. Phys. Rev. Lett. 2000, 85, 1879–1882. [Google Scholar] [CrossRef] [PubMed]
- Feng, C.; Lu, X.; Preussler, S.; Schneider, T. Gain Spectrum Engineering in Distributed Brillouin Fiber Sensors. J. Light. Technol. 2019, 37, 5231–5237. [Google Scholar] [CrossRef]
- Al-Taiy, H.; Wenzel, N.; Preußler, S.; Klinger, J.; Schneider, T. Ultra-narrow linewidth, stable and tunable laser source for optical communication systems and spectroscopy. Opt. Lett. 2014, 39, 5826–5829. [Google Scholar] [CrossRef]
- Preußler, S.; Wenzel, N.; Braun, R.P.; Owschimikow, N.; Vogel, C.; Deninger, A.; Zadok, A.; Woggon, U.; Schneider, T. Generation of ultra-narrow, stable and tunable millimeter- and terahertz- waves with very low phase noise. Opt. Express 2013, 21, 23950–23962. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Preussler, S.; Schneider, T. Stimulated Brillouin scattering gain bandwidth reduction and applications in microwave photonics and optical signal processing. Opt. Eng. 2015, 55, 031110. [Google Scholar] [CrossRef]
- Preussler, S.; Wiatrek, A.; Jamshidi, K.; Schneider, T. Ultrahigh-resolution spectroscopy based on the bandwidth reduction of stimulated brillouin scattering. IEEE Photonics Technol. Lett. 2011, 23, 1118–1120. [Google Scholar] [CrossRef]
- Wiatrek, A.; Preußler, S.; Jamshidi, K.; Schneider, T. Frequency Domain Aperture for Ultra-High Resolution Brillouin Based Spectroscopy. In Proceedings of the 2012 Conference on Lasers and Electro-Optics (CLEO), San Jose, CA, USA, 6–11 May 2012; OSA: Washington, DC, USA, 2012; p. JW4A.63. [Google Scholar] [CrossRef]
- Preussler, S.; Wiatrek, A.; Jamshidi, K.; Schneider, T. Increasing the resolution of optical spectrometers for the measurement of advanced optical communication signals. Eur. Conf. Opt. Commun. ECOC 2012, 2–4. [Google Scholar] [CrossRef]
- Preussler, S.; Wiatrek, A.; Jamshidi, K.; Schneider, T. Quasi-light-storage enhancement by reducing the Brillouin gain bandwidth. Appl. Opt. 2011, 50, 4252–4256. [Google Scholar] [CrossRef] [PubMed]
- Farahani, M.A.; Wylie, M.T.; Castillo-Guerra, E.; Colpitts, B.G. Reduction in the number of averages required in BOTDA sensors using wavelet denoising techniques. J. Light. Technol. 2012, 30, 1134–1142. [Google Scholar] [CrossRef]
- Soto, M.A.; Ramírez, J.A.; Thévenaz, L. Intensifying the response of distributed optical fibre sensors using 2D and 3D image restoration. Nat. Commun. 2016, 7, 10870. [Google Scholar] [CrossRef] [Green Version]
- Feng, C.; Preussler, S.; Emad Kadum, J.; Schneider, T. Measurement Accuracy Enhancement via Radio Frequency Filtering in Distributed Brillouin Sensing. Sensors 2019, 19, 2878. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Kadum, J.; Feng, C.; Preussler, S.; Schneider, T. Improvement of the measurement accuracy of distributed Brillouin sensing via radio frequency filtering. In Proceedings of the Seventh European Workshop on Optical Fibre Sensors, Limassol, Cyprus, 28 August 2019; Volume 11199, p. 111991R. [Google Scholar] [CrossRef]
- De Souza, K.; Newson, T.P. Improvement of signal-to-noise capabilities of a distributed temperature sensor using optical preamplification. Meas. Sci. Technol. 2001, 12, 952–957. [Google Scholar] [CrossRef]
- Soto, M.A.; Thévenaz, L. Modeling and evaluating the performance of Brillouin distributed optical fiber sensors. Opt. Express 2013, 21, 31347–31366. [Google Scholar] [CrossRef]
- Wang, S.; Yang, Z.; Soto, M.; Thevenaz, L. Study on the signal-to-noise ratio of Brillouin optical-time domain analyzers. Opt. Express 2020, 28, 19864–19876. [Google Scholar] [CrossRef] [PubMed]
- Bao, X.; Brown, A.; DeMerchant, M.; Smith, J. Characterization of the Brillouin-loss spectrum of single-mode fibers by use of very short (<10-ns) pulses. Opt. Lett. 1999, 24, 510–512. [Google Scholar] [CrossRef]
- Feng, C.; Lu, X.; Preussler, S.; Schneider, T. Measurement accuracy enhancement of distributed Brillouin sensors based on gain spectrum engineering. In Proceedings of the Seventh European Workshop on Optical Fibre Sensors, Limassol, Cyprus, 28 August 2019; Volume 11199, p. 111991S. [Google Scholar] [CrossRef]
- Urricelqui, J.; Alem, M.; Sagues, M.; Thévenaz, L.; Loayssa, A.; Soto, M.A. Mitigation of modulation instability in Brillouin distributed fiber sensors by using orthogonal polarization pulses. In Proceedings of the Proceedings Volume 9634, 24th International Conference on Optical Fibre Sensors, Curitiba, Brazil, 28 September 2015; Volume 9634, p. 963433. [Google Scholar] [CrossRef] [Green Version]
- Soto, M.A.; Ricchiuti, A.L.; Zhang, L.; Barrera, D.; Sales, S.; Thevenaz, L. Time and frequency pump-probe multiplexing to enhance the signal response of Brillouin optical time-domain analyzers. Opt. Express 2014, 22, 28584–28595. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Feng, C.; Iribas, H.; Marinelaerña, J.; Schneider, T.; Loayssa, A. Detrimental Effects in Brillouin Distributed Sensors Caused By EDFA Transient. In Proceedings of the 2017 Conference on Lasers and Electro-Optics (CLEO), San Jose, CA, USA, 14–19 May 2017; p. JTu5A.85. [Google Scholar] [CrossRef] [Green Version]
- Iribas, H.; Mariñelarena, J.; Feng, C.; Urricelqui, J.; Schneider, T.; Loayssa, A. Effects of pump pulse extinction ratio in Brillouin optical time-domain analysis sensors. Opt. Express 2017, 25, 27896–27911. [Google Scholar] [CrossRef] [PubMed]
- Zornoza, A.; Olier, D.; Sagues, M.; Loayssa, A. Brillouin distributed sensor using RF shaping of pump pulses. Meas. Sci. Technol. 2010, 21, 094021. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Static BOTDA | |
| Sensing range extension | 40.4% |
| Measurand resolution enhancement | 2 times |
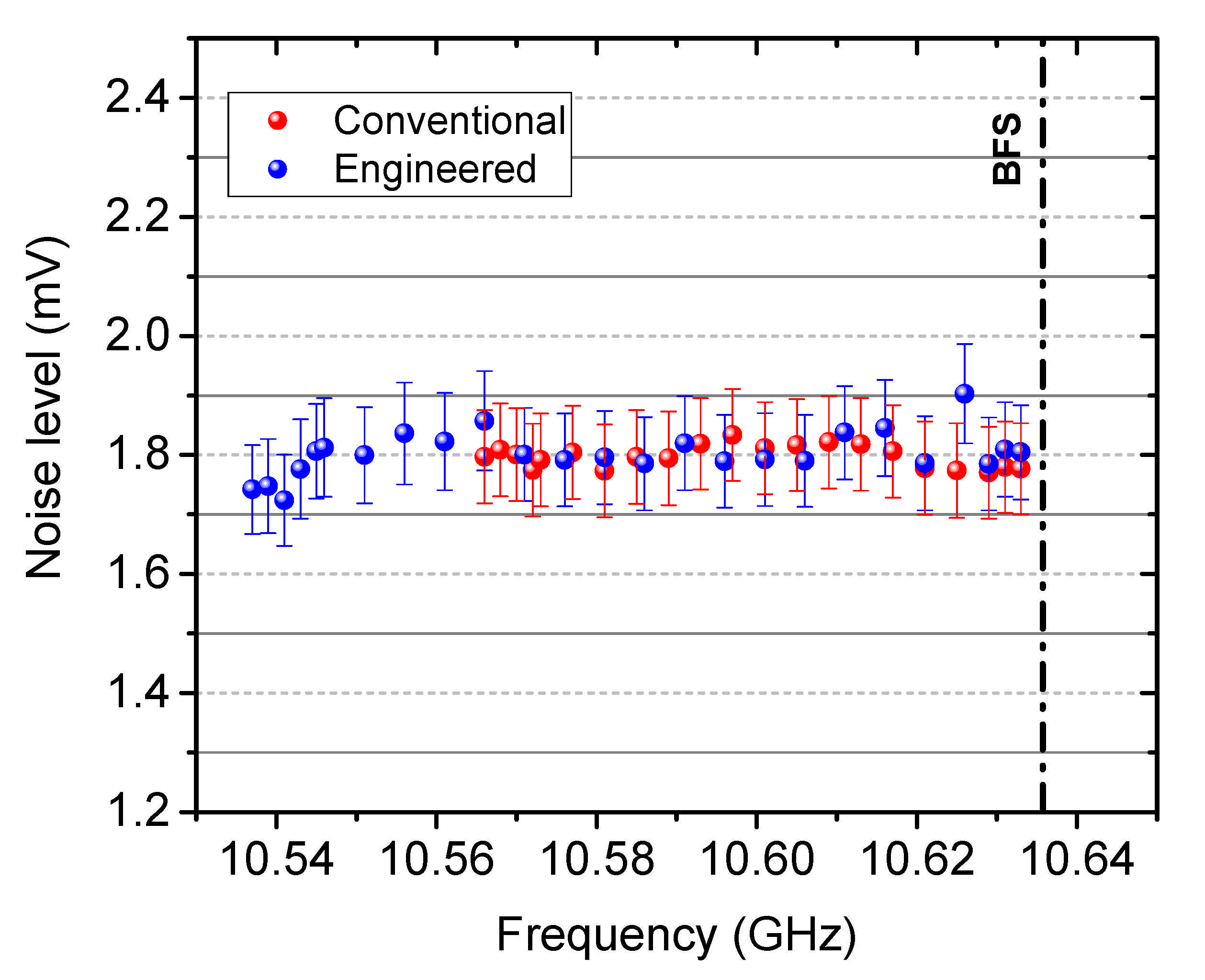
| Noise level | The same |
| Dynamic SA-BOTDA | |
| Dynamic range extension | 70.45% |
| Slope enhancement | 30% |
| Noise level | The same |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Feng, C.; Schneider, T. Benefits of Spectral Property Engineering in Distributed Brillouin Fiber Sensing. Sensors 2021, 21, 1881. https://doi.org/10.3390/s21051881
Feng C, Schneider T. Benefits of Spectral Property Engineering in Distributed Brillouin Fiber Sensing. Sensors. 2021; 21(5):1881. https://doi.org/10.3390/s21051881
Chicago/Turabian StyleFeng, Cheng, and Thomas Schneider. 2021. "Benefits of Spectral Property Engineering in Distributed Brillouin Fiber Sensing" Sensors 21, no. 5: 1881. https://doi.org/10.3390/s21051881
APA StyleFeng, C., & Schneider, T. (2021). Benefits of Spectral Property Engineering in Distributed Brillouin Fiber Sensing. Sensors, 21(5), 1881. https://doi.org/10.3390/s21051881