
A Hybrid Visual Tracking Algorithm Based on SOM Network and Correlation Filter


Abstract
:1. Introduction
2. Related Works
- Systematically analyze the influence of different feature types of tracking objects and the size of surrounding environment area on the design of SOM network and correlation filters in complex scenes.
- The performance of this algorithm and other related works [27] are discussed and compared in detail. We have evaluated the algorithm and conducted extensive testing and comparison on the OTB-50 [38] and OTB-100 [39] datasets and other challenging video sequences (VOT2020 [40], UAV123 [41], LaSOT [42] and NFS [43]).
3. Method Overview
3.1. Kernelized Correlation Filters-Based Tracker
3.2. Displacement Filter
3.3. Scale Filter
3.4. Long-Time Memory Filter
3.5. Online Object Detector
3.6. Method Implementation
| Algorithm 1: Object tracking algorithm based on SOM and correlation filter. |
 |
4. Experiments and Results
4.1. Experiments Details
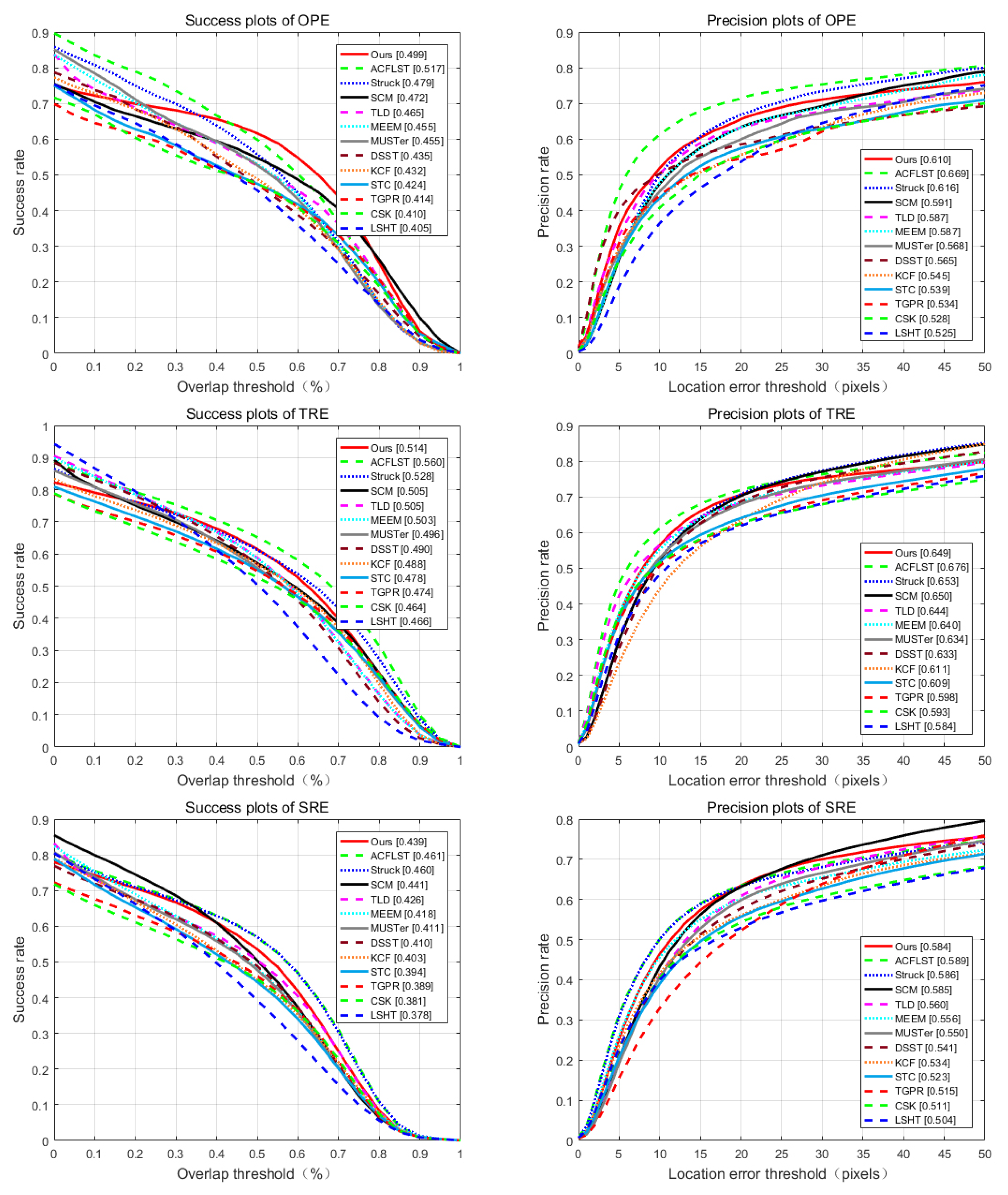
4.2. Experiments on OTB
4.2.1. Overall Performance
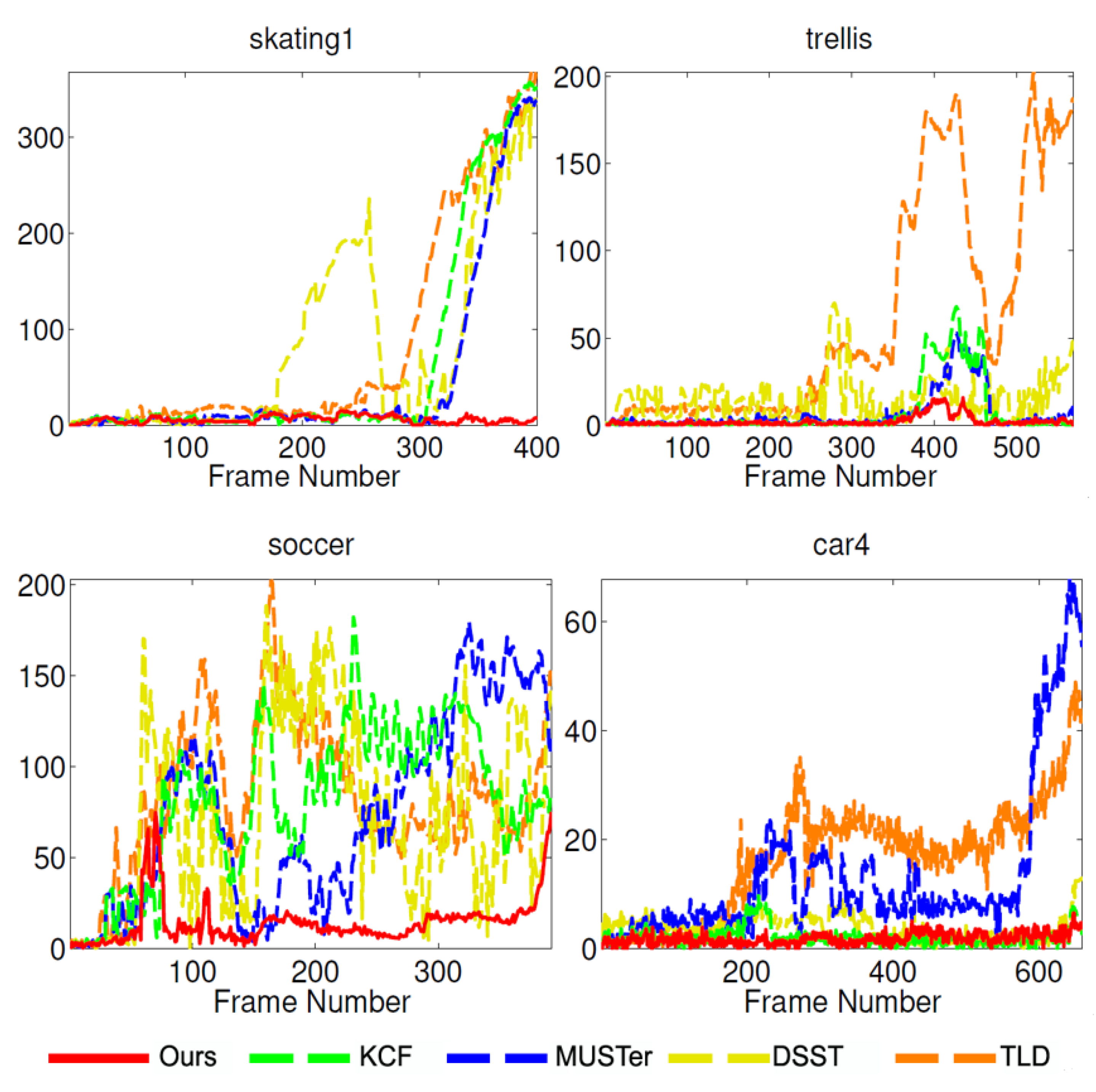
4.2.2. Complicated Scenario Test
4.2.3. Ablation Study
- CT-HOG: Similar to the KCF tracker [6], use HOG features to replace SOM features to train displacement filters and .
- CT-NRe (No Re-Detection): Correlation tracker without re-detection module, where the training of displacement filters and is based on SOM features.
- CT-FSC (Fixed Scale): Correlation tracker with re-detection module, but no scale estimation.
4.3. Experiments on VOT2020
4.4. Experiments on NFS
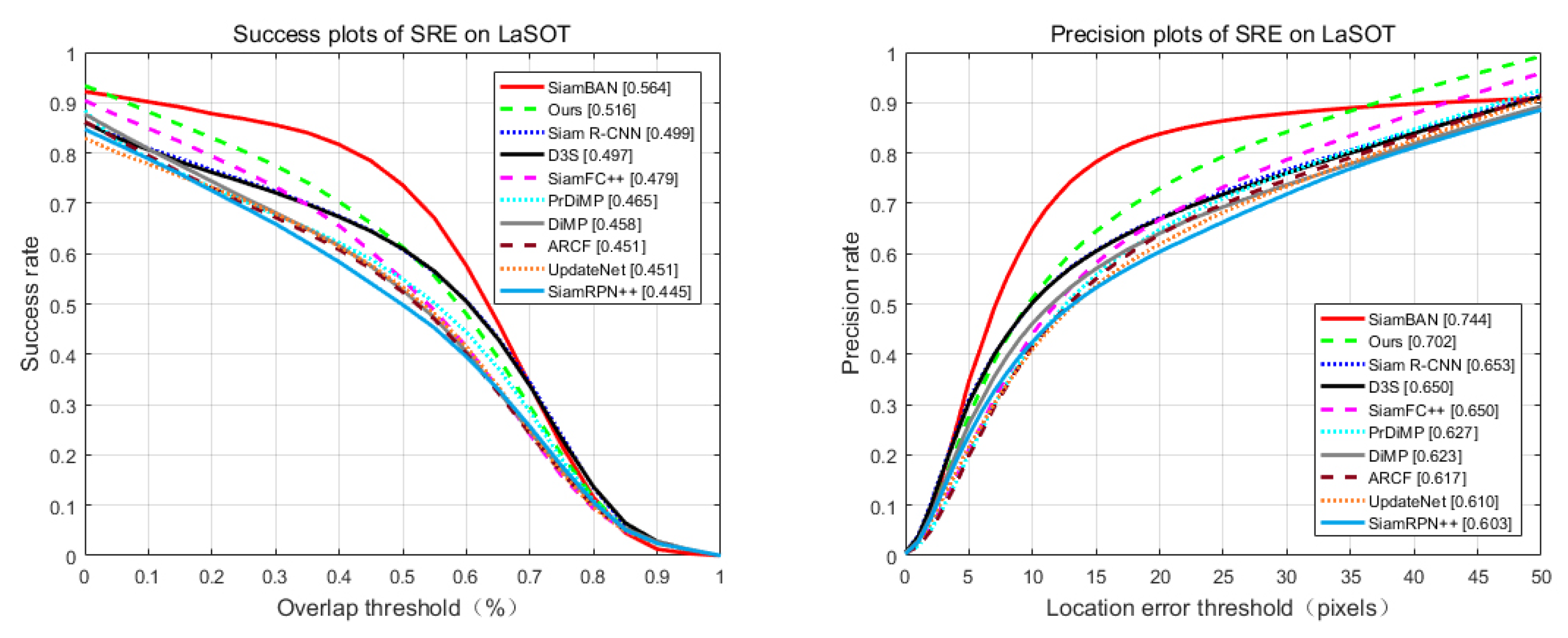
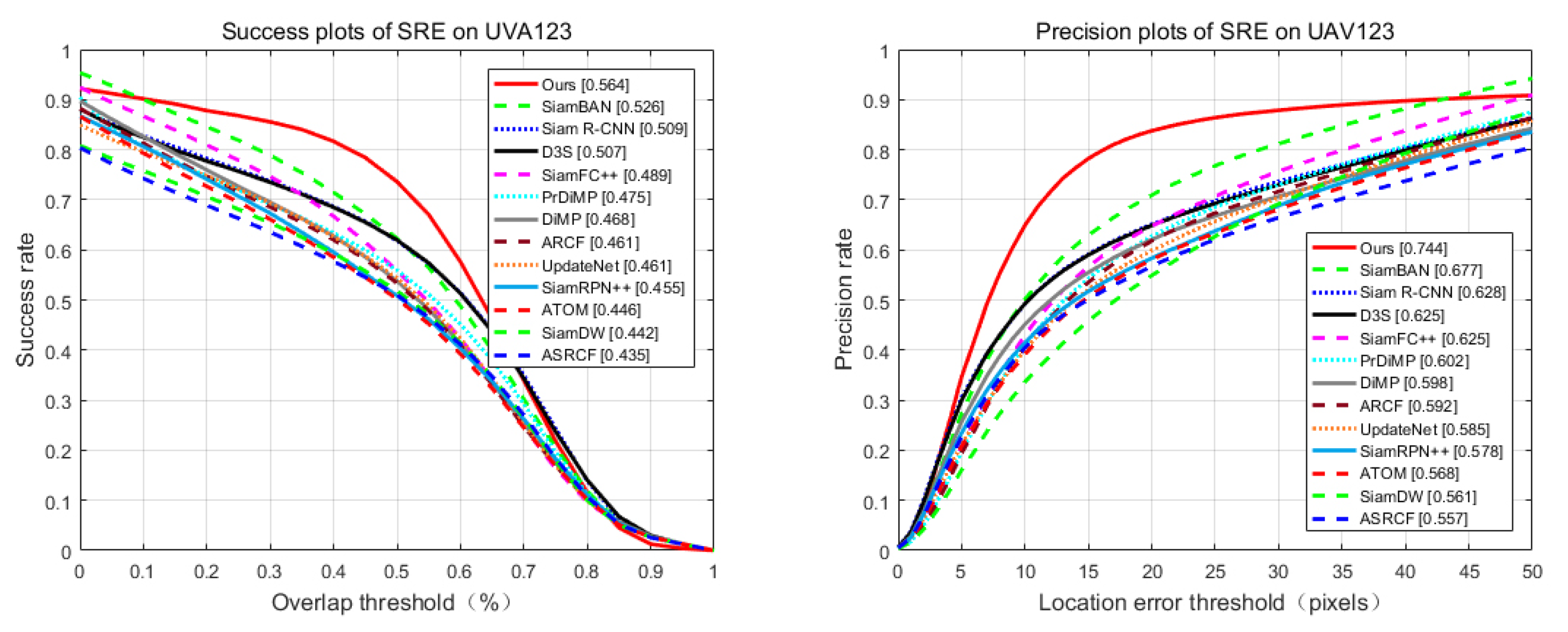
4.5. Experiments on UAV123 and LaSOT
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Zhou, L.; Wang, H.; Jin, Y.; Hu, Z.; Wei, Q.; Li, J.; Li, J. Robust Visual Tracking Based on Adaptive Multi-Feature Fusion Using the Tracking Reliability Criterion. Sensors 2020, 20, 7165. [Google Scholar] [CrossRef]
- Zhou, Y.; Zhang, W.; Shi, Y.; Wang, Z.; Li, F.; Huang, Q. LPCF: Robust Correlation Tracking via Locality Preserving Tracking Validation. Sensors 2020, 20, 6853. [Google Scholar] [CrossRef]
- Xia, H.; Zhang, Y.; Yang, M.; Zhao, Y. Visual Tracking via Deep Feature Fusion and Correlation Filters. Sensors 2020, 20, 3370. [Google Scholar] [CrossRef] [PubMed]
- Hare, S.; Saffari, A.; Torr, P.H.S. Struck: Structured output tracking with kernels. IEEE Trans. Pattern Anal. Mach. Intell. 2015, 38, 2096–2109. [Google Scholar] [CrossRef] [Green Version]
- Henriques, J.F.; Caseiro, R.; Martins, P.; Batista, J. Exploiting the circulant structure of tracking-by-detection with kernels. In Proceedings of the European Conference on Computer Vision (ECCV), Florence, Italy, 7–13 October 2012. [Google Scholar]
- Henriques, J.F.; Caseiro, R.; Martins, P.; Batista, J. High-speed tracking with kernelized correlation filters. IEEE Trans. Pattern Anal. Mach. Intell. 2015, 37, 583–596. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- State, A.; Coleca, F.; Barth, E.; Martinetz, T. Hand Tracking with an Extended Self-Organizing Map. In Advances in Self-Organizing Maps; Springer: Berlin/Heidelberg, Germany, 2013; pp. 115–124. [Google Scholar]
- Zhang, Y.; Tang, Y.; Fang, B.; Shang, Z. Real-time object tracking in video pictures based on self-organizing map and image segmentation. In Proceedings of the 2014 IEEE 7th Joint International Information Technology and Artificial Intelligence Conference, Chongqing, China, 20–21 December 2014. [Google Scholar]
- Brown, E.N.; Frank, L.M.; Tang, D.; Quirk, M.C.; Wilson, M.A. A statistical paradigm for neural spike train decoding applied to position prediction from ensemble firing patterns of rat hippocampal place cells. J. Neurosci. 1998, 18, 7411–7425. [Google Scholar] [CrossRef] [Green Version]
- Zou, W.Y.; Ng, A.Y.; Zhu, S.; Yu, K. Deep learning of invariant features via simulated fixations in video. Adv. Neural Inf. Process. Syst. 2012, 25, 3203–3211. [Google Scholar]
- Babenko, B.; Yang, M.-H.; Belongie, S. Robust object tracking with online multiple instance learning. IEEE Trans. Pattern Anal. Mach. Intell. 2011, 33, 1619–1632. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Avidan, S. Ensemble tracking. IEEE Trans. Pattern Anal. Mach. Intell. 2007, 29, 261–271. [Google Scholar] [CrossRef]
- Bertinetto, L.; Bertinetto, L.; Valmadre, J.; Henriques, J.F.; Vedaldi, A.; Torr, P.H. Fully-Convolutional Siamese Networks for Object Tracking; Springer: Cham, Switzerland, 2016. [Google Scholar]
- Zhong, B.; Yao, H.; Chen, S.; Ji, R.; Chin, T.J.; Wang, H. Visual tracking via weakly supervised learning from multiple imperfect oracles. Pattern Recognit. 2014, 47, 1395–1410. [Google Scholar] [CrossRef]
- Chen, Z.; Zhong, B.; Li, G.; Zhang, S.; Ji, R. Siamese Box Adaptive Network for Visual Tracking. In Proceedings of the IEEE International Conference on Computer Vision and Pattern Recognition, CVPR, Seattle, WA, USA, 14–19 June 2020. [Google Scholar]
- Zhong, B.; Bai, B.; Li, J.; Zhang, Y.; Fu, Y. Hierarchical Tracking by Reinforcement Learning-Based Searching and Coarse-to-Fine Verifying. IEEE Trans. Image Process. 2018, 28, 2331–2341. [Google Scholar] [CrossRef]
- Danelljan, M.; Hager, G.; Khan, F.S.; Felsberg, M. Accurate scale estimation for robust visual tracking. In Proceedings of the British Machine Vision Conference (BMVC), Nottingham, UK, 1–5 September 2014. [Google Scholar]
- Bolme, D.S.; Beveridge, J.R.; Draper, B.A.; Lui, Y.M. Visual object tracking using adaptive correlation filters. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), San Francisco, CA, USA, 13–18 June 2010. [Google Scholar]
- Nam, H.; Han, B. Learning Multi-domain Convolutional Neural Networks for Visual Tracking. In Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 27–30 June 2016; pp. 4293–4302. [Google Scholar] [CrossRef] [Green Version]
- Yilmaz, A.; Javed, O.; Shah, M. Object tracking: A survey. ACM Comput. Surv. 2006, 38. [Google Scholar] [CrossRef]
- Li, X.; Hu, W.; Shen, C.; Zhang, Z.; Dick, A.R.; van den Hengel, A. A survey of appearance models in visual object tracking. ACM Trans. Intell. Syst. Technol. 2013, 4, 8. [Google Scholar] [CrossRef] [Green Version]
- Smeulders, A.W.M.; Chu, D.M.; Cucchiara, R.; Calderara, S.; Dehghan, A.; Shah, M. Visual tracking: An experimental survey. IEEE Trans. Pattern Anal. Mach. Intell. 2014, 36, 1442–1468. [Google Scholar]
- Ma, C.; Huang, J.-B.; Yang, X.; Yang, M.-H. Adaptive Correlation Filters with Long-Term and Short-Term Memory for Object Tracking. Int. J. Comput. Vis. 2018, 126, 771–796. [Google Scholar] [CrossRef] [Green Version]
- Zhang, K.; Zhang, L.; Liu, Q.; Zhang, D.; Yang, M.-H. Fast visual tracking via dense spatio-temporal context learning. In Proceedings of the European Conference on Computer Vision (ECCV), Zurich, Switzerland, 6–12 September 2014. [Google Scholar]
- Zhou, Y.; Yang, W.; Shen, Y. Scale-Adaptive KCF Mixed with Deep Feature for Pedestrian Tracking. Electronics 2021, 10, 536. [Google Scholar] [CrossRef]
- Zhang, K.; Wei, G.; Yang, X.; Li, S.; Yan, J. Aerial Infrared Target Tracking Method Based on KCFfor Frequency-Domain Scale Estimation. Appl. Opt. 2020, 59, 5086–5097. [Google Scholar] [CrossRef]
- Hong, Z.; Chen, Z.; Wang, C.; Mei, X.; Prokhorov, D.; Tao, D. Multi-store tracker (MUSTer): A cognitive psychology inspired approach to object tracking. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Boston, MA, USA, 8–10 June 2015. [Google Scholar]
- Kalal, Z.; Mikolajczyk, K.; Matas, J. Tracking-learning-detection. IEEE Trans. Pattern Anal. Mach. Intell. 2012, 34, 1409–1422. [Google Scholar] [CrossRef] [Green Version]
- Bai, Q.; Wu, Z.; Sclaroff, S.; Betke, M.; Monnier, C. Randomized ensemble tracking. In Proceedings of the IEEE International Conference on Computer Vision (ICCV), Sydney, Australia, 3–6 December 2013; pp. 2040–2047. [Google Scholar]
- Grabner, H.; Leistner, C.; Bischof, H. Semi-supervised on-line boosting for robust tracking. In Proceedings of the European Conference on Computer Vision (ECCV), Marseille, France, 12–18 October 2008; pp. 234–247. [Google Scholar]
- Gao, J.; Ling, H.; Hu, W.; Xing, J. Transfer learning based visual tracking with gaussian processes regression. In Proceedings of the European Conference on Computer Vision (ECCV), Zurich, Switzerland, 6–12 September 2014. [Google Scholar]
- Pernici, F. Facehugger: The ALIEN tracker applied to faces. In Proceedings of the European Conference on Computer Vision (ECCV), Providence, RI, USA, 16–21 June 2012. [Google Scholar]
- Supancic, J.S.; Ramanan, D. Self-paced learning for long-term tracking. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Portland, ORE, USA, 25–27 June 2013. [Google Scholar]
- Hua, Y.; Alahari, K.; Schmid, C. Occlusion and motion reasoning for longterm tracking. In Proceedings of the European Conference on Computer Vision (ECCV), Zurich, Switzerland, 6–12 September 2014. [Google Scholar]
- Zhang, J.; Ma, S.; Sclaroff, S. MEEM: Robust tracking via multiple experts using entropy minimization. In Proceedings of the European Conference on Computer Vision (ECCV), Zurich, Switzerland, 6–12 September 2014. [Google Scholar]
- Liu, T.; Wang, G.; Yang, Q. Real-time part-based visual tracking via adaptive correlation filters. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Boston, MA, USA, 7–12 June 2015. [Google Scholar]
- Zhang, Y.; Tang, Y.; Fang, B.; Shang, Z. Fast multi-object tracking using convolutional neural networks with tracklets updating. In Proceedings of the 2017 International Conference on Security, Pattern Analysis, and Cybernetics (SPAC), Shenzhen, China, 15–18 December 2017. [Google Scholar]
- Wu, Y.; Lim, J.; Yang, M.H. Online object tracking: A benchmark. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Portland, ORE, USA, 25–27 June 2013. [Google Scholar]
- Wu, Y.; Lim, J.; Yang, M.H. Object Tracking Benchmark. IEEE Trans. Pattern Anal. Mach. Intell. 2015, 37, 1834–1848. [Google Scholar] [CrossRef] [Green Version]
- Kristan, M.; Leonardis, A.; Matas, J.; Felsberg, M.; Pugfelder, R.; Cehovin, L.; Vojir, T.; Bhat, G.; Lukezic, A.; Eldesokey, A.; et al. The visual object tracking vot2020 challenge results. In Proceedings of the ECCV2020 Workshops, Workshop on Visual Object Tracking Challenge, Glasgow, UK, 23–28 August 2020. [Google Scholar]
- Mueller, M.; Smith, N.; Ghanem, B. A benchmark and simulator for uav tracking. In European Conference on Computer Vision; Springer: Cham, Switzerland, 2016; pp. 445–461. [Google Scholar]
- Fan, H.; Lin, L.; Yang, F.; Chu, P.; Deng, G.; Yu, S.; Bai, H.; Xu, Y.; Liao, C.; Ling, H. LaSOT: A high-quality benchmark for large-scale single object tracking. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Los Angeles, CA, USA 15–21 June 2019; pp. 5374–5383. [Google Scholar]
- Kiani Galoogahi, H.; Fagg, A.; Huang, C.; Ramanan, D.; Lucey, S. Need for speed: A benchmark for higher frame rate object tracking. In Proceedings of the IEEE International Conference on Computer Vision, Venice, Italy, 22–29 October 2017; pp. 1125–1134. [Google Scholar]
- Li, Y.; Zhu, J. A scale adaptive kernel correlation filter tracker with feature integration. In Proceedings of the Procings of European Conference on Computer Vision Workshop, Zurich, Switzerland, 6–12 September 2014; pp. 254–265. [Google Scholar]
- Danelljan, M.; Khan, F.S.; Felsberg, M.; van de Weijer, J. Adaptive color attributes for real-time visual tracking. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Columbus, OH, USA, 24–27 June 2014. [Google Scholar]
- Kristan, M.; Pflugfelder, R.; Leonardis, A.; Matas, J.; Čehovin Zajc, L.; Nebehay, G.; Vojíř, T.; Fernandez Dominguez, G.; Lukežič, A.; Dimitriev, A.; et al. The visual object tracking VOT2014 challenge results. In Proceedings of the European Conference on Computer Vision Workshop, Zurich, Switzerland, 6–12 September 2014. [Google Scholar]
- Zhu, X.; Goldberg, A.B. Introduction to Semi-Supervised Learning. In Synthesis Lectures on Artificial Intelligence and Machine Learning; Morgan & Claypool Publishers: San Rafael, CA, USA, 2009. [Google Scholar]
- Grabner, H.; Grabner, M.; Bischof, H. Real-time tracking via on-line boosting. In Proceedings of the British Machine Vision Conference (BMVC), Edinburgh, UK, 4–7 September 2006; pp. 47–56. [Google Scholar]
- Shu, G.; Dehghan, A.; Oreifej, O.; Hand, E.; Shah, M. Part-based multipleperson tracking with partial occlusion handling. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Providence, RI, USA, 16–21 June 2012; pp. 1815–1821. [Google Scholar]
- Ledig, C.; Heckemann, R.A.; Aljabar, P.; Wolz, R.; Hajnal, J.V.; Hammers, A.; Rueckert, D. Segmentation of MRI brain scans using MALP-EM. In Proceedings of the MICCAI 2012 Grand Challenge and Workshop on Multi-Atlas Labeling, Nice, France, 1–5 October 2012; pp. 79–82. [Google Scholar]
- Arulampalam, M.S.; Maskell, S.; Gordon, N.J.; Clapp, T. A tutorial on particle filters for online nonlinear/non-gaussian bayesian tracking. IEEE Trans. Signal Process. 2002, 50, 174–188. [Google Scholar] [CrossRef] [Green Version]
- Lucas, B.D.; Kanade, T. An iterative image registration technique with an application to stereo vision. In Proceedings of the International Joint Conference on Artificial Intelligence (IJCAI), Vancouver, BC, Canada, 24–28 August 1981. [Google Scholar]
- Boddeti, V.N.; Kanade, T.; Kumar, B.V.K.V. Correlation filters for object alignment. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Portland, ORE, USA, 25–27 June 2013. [Google Scholar]
- Galoogahi, H.K.; Sim, T.; Lucey, S. Multi-channel correlation filters. In Proceedings of the IEEE International Conference on Computer Vision (ICCV), Sydney, Australia, 3–6 December 2013. [Google Scholar]
- Santner, J.; Leistner, C.; Saffari, A.; Pock, T.; Bischof, H. PROST: Parallel robust online simple tracking. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), San Francisco, CA, USA, 15–17 June 2010. [Google Scholar]
- Zhong, W.; Lu, H.; Yang, M.-H. Robust object tracking via sparse collaborative appearance model. IEEE Trans. Image Process. 2014, 3, 2356–2368. [Google Scholar] [CrossRef] [Green Version]
- Zabih, R.; Woodfill, J. Non-parametric local transforms for computing visual correspondence. In Proceedings of the European Conference on Computer Vision (ECCV), Stockholm, Sweden, 2–6 May 1994. [Google Scholar]
- Zhu, Z.; Wang, Q.; Bo, L.; Wu, W.; Yan, J.; Hu, W. Distractor-aware siamese networks for visual object tracking. In Proceedings of the ECCV, Munich, Germany, 8–14 September 2018. [Google Scholar]
- Lukei, A.; Matas, J.; Kristan, M. D3S—A Discriminative Single Shot Segmentation Tracker. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Long Beach, CA, USA, 16–19 June 2019. [Google Scholar]
- Voigtlaender, P.; Luiten, J.; Torr, P.H.; Leibe, B. Siam R-CNN: Visual Tracking by Re-Detection. In Proceedings of the 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR) IEEE, Seattle, WA, USA, 14–19 June 2020. [Google Scholar]
- Danelljan, M.; Gool, L.V.; Timofte, R. Probabilistic Regression for Visual Tracking. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Seattle, WA, USA, 14–19 June 2020. [Google Scholar]
- Bhat, G.; Danelljan, M.; Gool, L.V.; Timofte, R. Learning discriminative model prediction for tracking. In Proceedings of the IEEE International Conference on Computer Vision, Seoul, Korea, 27 October–2 November 2019. [Google Scholar]
- Dai, K.; Wang, D.; Lu, H.; Sun, C.; Li, J. Visual Tracking via Adaptive Spatially-Regularized Correlation Filters. In Proceedings of the 2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Long Beach, CA, USA, 16–19 June 2019; pp. 4665–4674. [Google Scholar]
- Xu, Y.; Wang, Z.; Li, Z.; Yuan, Y.; Yu, G. SiamFC++: Towards Robust and Accurate Visual Tracking with Target Estimation Guidelines. In Proceedings of the AAAI Conference on Artificial Intelligence, New York, NY, USA, 7–12 February 2020; Volume 34, pp. 12549–12556. [Google Scholar]
- Huang, Z.; Fu, C.; Li, Y.; Lin, F.; Lu, P. Learning Aberrance Repressed Correlation Filters for Real-Time UAV Tracking. In Proceedings of the IEEE/CVF International Conference on Computer Vision (ICCV), Seoul, Korea, 27 October 27–2 November 2019. [Google Scholar]
- Zhang, L.; Gonzalez-Garcia, A.; Weijer, J.V.D.; Danelljan, M.; Khan, F.S. Learning the Model Update for Siamese Trackers. In Proceedings of the IEEE/CVF International Conference on Computer Vision (ICCV), Seoul, Korea, 27 October–2 November 2019. [Google Scholar]
- Li, B.; Wu, W.; Wang, Q.; Zhang, F.; Xing, J.; Yan, J. SiamRPN++: Evolution of siamese visual tracking with very deep networks. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Long Beach, CA, USA, 16–19 June 2019; pp. 4282–4291. [Google Scholar]
- Danelljan, M.; Bhat, G.; Khan, F.S.; Felsberg, M. ATOM: Accurate tracking by overlap maximization. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Long Beach, CA, USA, 16–19 June 2019; pp. 4660–4669. [Google Scholar]
- Zhang, Z.; Peng, H. Deeper and wider siamese networks for real-time visual tracking. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Long Beach, CA, USA, 16–19 June 2019; pp. 4591–4600. [Google Scholar]
- Ma, Z.; Wang, L.; Zhang, H.; Lu, W.; Yin, J. RPT: Learning Point Set Representation for Siamese Visual Tracking. arXiv 2020, arXiv:2008.03467. [Google Scholar]
- Zhang, Z.; Peng, H.; Fu, J.; Li, B.; Hu, W. Ocean: Object-Aware Anchor-Free Tracking. arXiv 2020, arXiv:2006.10721. [Google Scholar]
- Yan, B.; Wang, D.; Lu, H.; Yang, X. Alpha-rene: Boosting tracking performance by precise bounding box estimation. arXiv 2020, arXiv:2007.02024. [Google Scholar]
- Chen, Y.; Xu, J.; Yu, J. AFOD: Adaptive Focused Discriminative Segmentation Tracker (AFOD). In European Conference on Computer Vision; Springer: Cham, Switzerland, 2020. [Google Scholar]
- Bhat, G.; Lawin, F.J.; Danelljan, M.; Robinson, A.; Felsberg, M.; Van Gool, L.; Timofte, R. Learning What to Learn for Video Object Segmentation; Springer: Cham, Switzerland, 2020. [Google Scholar]
- Dunnhofer, M.; Martinel, N.; Micheloni, C. A distilled model for tracking and tracker fusion. arXiv 2020, arXiv:2007.04108. [Google Scholar]
- Xu, T.; Feng, Z.H.; Wu, X.J.; Kittler, J. Afat: Adaptive failure-aware tracker for robust visual object tracking. arXiv 2020, arXiv:2005.13708. [Google Scholar]
- Danelljan, M.; Bhat, G.; Khan, F.S.; Felsberg, M. ECO: Efficient convolution operators for tracking. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 6638–6646. [Google Scholar]
- Danelljan, M.; Robinson, A.; Khan, F.S.; Felsberg, M. Beyond correlation filters: Learning continuous convolution operators for visual tracking. In European Conference on Computer Vision; Springer: Cham, Switzerland, 2016; pp. 472–488. [Google Scholar]
- Bhat, G.; Johnander, J.; Danelljan, M.; Khan, F.S.; Felsberg, M. Unveiling the power of deep tracking. In Proceedings of the European Conference on Computer Vision, Munich, Germany, 8–14 September 2018; pp. 483–498. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Tracker | OS (%) | DP (%) | Speed (FPS) | |||
|---|---|---|---|---|---|---|
| I | II | I | II | I | II | |
| Ours | 78.3 | 69.7 | 84.8 | 77.2 | 21.6 | 22.7 |
| SiamBAN [15] | 79.4 | 70.3 | 87.5 | 77.4 | 23.6 | 25.2 |
| SiamR-CNN [60] | 68.4 | 66.3 | 86.5 | 74.4 | 10.6 | 14.2 |
| D3S [59] | 67.6 | 60.2 | 81 | 77.1 | 21.8 | 23.8 |
| SiamFC++ [64] | 60.8 | 54.5 | 68.5 | 65.3 | 32.5 | 33 |
| PrDiMP [61] | 59.96 | 55.72 | 74.01 | 66.05 | 23.54 | 26.99 |
| DiMP [62] | 58.08 | 51.23 | 75.4 | 71.28 | 45.28 | 45.01 |
| ARCF [65] | 34.24 | 32.37 | 53.44 | 52.78 | 26.82 | 21.35 |
| UpdateNet [66] | 42.15 | 41.18 | 54.91 | 52.76 | 35.07 | 29.08 |
| SiamRPN++ [67] | 56.79 | 49.51 | 65.43 | 61.26 | 13.31 | 11.31 |
| ATOM [68] | 39.26 | 32.1 | 43.43 | 41.99 | 26.29 | 30.09 |
| SiamDW [69] | 50.38 | 46.26 | 56.82 | 61.1 | 23.17 | 25.66 |
| ASRCF [63] | 50.17 | 42.05 | 54.15 | 51.53 | 40.79 | 42.3 |
| Attributes | Ours | Siam BAN [15] | Siam R-CNN [60] | D3S [59] | Siam FC++ [64] | Pr DiMP [61] | DiMP [62] | ARCF [65] | Update Net [66] | Siam RPN++ [67] | ATOM [68] | Siam DW [69] | ASRCF [63] |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Illumination variation (23) | 73 | 72.7 | 72.6 | 63.3 | 60.5 | 59.38 | 59.38 | 33.7 | 41.98 | 49.85 | 29.54 | 44.17 | 43.16 |
| Out-of-plane rotation (37) | 78.8 | 74.7 | 71.5 | 68.5 | 61 | 62.91 | 60.93 | 40.22 | 45.23 | 51.15 | 37.34 | 49.99 | 45.56 |
| Scale variation (28) | 69.6 | 73.3 | 72.9 | 57.5 | 48.2 | 47.13 | 52.92 | 32.39 | 35.48 | 48.99 | 32.71 | 51.69 | 33.76 |
| Occlusion (27) | 80.2 | 78.8 | 74.6 | 67.9 | 62 | 63.69 | 59.26 | 34.58 | 44.12 | 48.96 | 36.95 | 43.3 | 42.06 |
| Deformation (17) | 88.2 | 85.1 | 82.5 | 65.4 | 67.9 | 74.36 | 62.96 | 34.34 | 37.88 | 52.01 | 42.3 | 40.59 | 48.94 |
| Motion blur (12) | 66.6 | 67.7 | 67.4 | 67.1 | 54.5 | 60.58 | 51.89 | 23.78 | 34.69 | 52.06 | 26.71 | 49.67 | 27.98 |
| Fast motion (17) | 67.1 | 66.6 | 65.6 | 69.7 | 50 | 54.94 | 52.45 | 24.57 | 40.01 | 58.4 | 35.65 | 45.67 | 32.2 |
| In-plane rotation (31) | 77.3 | 73.3 | 67.9 | 65.5 | 58.9 | 61.48 | 64.94 | 36.43 | 48.74 | 53.53 | 34.85 | 49.01 | 43.89 |
| Out of view (6) | 70.5 | 71.3 | 69.7 | 74.9 | 55.7 | 63.37 | 56.56 | 28.85 | 41.92 | 55.21 | 38.73 | 52.16 | 42.29 |
| Background Clutter (21) | 77.7 | 75.8 | 77.8 | 72.3 | 67.8 | 66.95 | 59.75 | 39.32 | 47.72 | 56.41 | 41.25 | 41.09 | 50.19 |
| Low resolution (4) | 43.4 | 46.9 | 44.7 | 37.1 | 31.5 | 26.91 | 34.38 | 33 | 26.42 | 24.7 | 16.54 | 32.8 | 19.47 |
| Weighted average | 75.7 | 74.3 | 72.8 | 64.8 | 57.4 | 59.45 | 58.26 | 35.09 | 41.21 | 51.32 | 34.95 | 45.01 | 41.12 |
| Attributes | Ours | Siam BAN [15] | Siam R-CNN [60] | D3S [59] | Siam FC++ [64] | Pr DiMP [61] | DiMP [62] | ARCF [65] | Update Net [66] | Siam RPN++ [67] | ATOM [68] | Siam DW [69] | ASRCF [63] |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Illumination variation (23) | 78 | 78 | 79.3 | 76.7 | 66.2 | 70.72 | 70.61 | 57.9 | 47.5 | 55.62 | 33.55 | 49.64 | 49.04 |
| Out-of-plane rotation (37) | 83.1 | 84.8 | 85.4 | 84.1 | 70 | 76.86 | 76.24 | 56.44 | 54.76 | 63.28 | 50.06 | 56.56 | 57.54 |
| Scale variation (28) | 76.4 | 85.2 | 82.6 | 79.6 | 63.2 | 66.52 | 74.73 | 56.3 | 50.71 | 65.06 | 47.24 | 61.22 | 50.54 |
| Occlusion (27) | 83.7 | 85.2 | 84.3 | 78.5 | 66.7 | 77.94 | 75.93 | 52.86 | 53.11 | 57.46 | 45.76 | 54.72 | 54.31 |
| Deformation (17) | 86.3 | 85.4 | 85.7 | 81.3 | 69.1 | 82.18 | 71.63 | 50 | 52.35 | 54.64 | 50.13 | 46.8 | 57.49 |
| Motion blur (12) | 65.1 | 71.1 | 68.3 | 72.4 | 55.6 | 63.71 | 59.47 | 33.19 | 36.19 | 54.84 | 35.98 | 50.82 | 35.3 |
| Fast motion (17) | 68.1 | 69.1 | 69.4 | 72.7 | 48.7 | 58.97 | 58.39 | 27.61 | 38.4 | 59.73 | 39.43 | 55.25 | 34.78 |
| In-plane rotation (31) | 79.5 | 78.4 | 79.1 | 78.7 | 66.7 | 72.61 | 78.52 | 49.43 | 54.17 | 63.18 | 44.16 | 60.71 | 53.8 |
| Out of view (6) | 71 | 71.2 | 70.5 | 71.1 | 50.1 | 67.28 | 54.53 | 41.13 | 37.17 | 56.8 | 39.86 | 58.83 | 39.94 |
| Background Clutter (21) | 79.8 | 81.7 | 83.1 | 79.3 | 71.9 | 77.56 | 68.21 | 54.99 | 60.36 | 57.89 | 45.49 | 40.95 | 51.96 |
| Low resolution (4) | 71 | 75.9 | 77.9 | 88.7 | 44.9 | 61.85 | 72.35 | 47.37 | 48.63 | 55.66 | 30.98 | 54.72 | 57.01 |
| Weighted average | 79.4 | 79.6 | 80.4 | 80.5 | 66.1 | 72.82 | 74 | 50.67 | 48.2 | 61.26 | 44.76 | 55.6 | 51.71 |
| Ours | CT-FSC | CT-NRe | CT-HOG | CT-JOP | |
|---|---|---|---|---|---|
| OS (%) | 79.3 | 72.9 | 70.3 | 60.5 | 50.7 |
| DP (%) | 85.8 | 83.4 | 72.5 | 68.7 | 61.2 |
| Tracker | VOT_ST2020 | VOT_RT2020 | Unsupervised | ||||
|---|---|---|---|---|---|---|---|
| EAO | A | R | EAO | A | R | AO | |
| Ours | 0.519 | 0.762 | 0.87 | 0.476 | 0.685 | 0.821 | 0.615 |
| RPT [70] | 0.530 | 0.700 | 0.869 | 0.29 | 0.587 | 0.614 | 0.632 |
| OceanPlus [71] | 0.491 | 0.685 | 0.842 | 0.471 | 0.679 | 0.824 | 0.575 |
| AlphaRef [72] | 0.482 | 0.754 | 0.777 | 0.486 | 0.754 | 0.788 | 0.590 |
| AFOD [73] | 0.472 | 0.713 | 0.795 | 0.458 | 0.708 | 0.780 | 0.539 |
| LWTL [74] | 0.463 | 0.719 | 0.798 | 0.337 | 0.619 | 0.72 | 0.570 |
| D3S [59] | 0.439 | 0.699 | 0.769 | 0.416 | 0.693 | 0.748 | 0.508 |
| TRASFUSTm [75] | 0.424 | 0.696 | 0.745 | 0.282 | 0.576 | 0.616 | 0.524 |
| AFAT [76] | 0.378 | 0.693 | 0.678 | 0.372 | 0.687 | 0.676 | 0.502 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, Y.; Huang, X.; Yang, M. A Hybrid Visual Tracking Algorithm Based on SOM Network and Correlation Filter. Sensors 2021, 21, 2864. https://doi.org/10.3390/s21082864
Zhang Y, Huang X, Yang M. A Hybrid Visual Tracking Algorithm Based on SOM Network and Correlation Filter. Sensors. 2021; 21(8):2864. https://doi.org/10.3390/s21082864
Chicago/Turabian StyleZhang, Yuanping, Xiumei Huang, and Ming Yang. 2021. "A Hybrid Visual Tracking Algorithm Based on SOM Network and Correlation Filter" Sensors 21, no. 8: 2864. https://doi.org/10.3390/s21082864
APA StyleZhang, Y., Huang, X., & Yang, M. (2021). A Hybrid Visual Tracking Algorithm Based on SOM Network and Correlation Filter. Sensors, 21(8), 2864. https://doi.org/10.3390/s21082864