1. Introduction
The basic strategy of geodetic network optimisation entails minimising selected objective functions that are independent of the datum of the geodetic network. In this way, the problem is solved iteratively in a convergent process, where the current solution is better than the previous one. In the process of designing geodetic networks, a criterion matrix is used, which represents the required network quality so that the optimisation problem is solved directly. On the other hand, one of the most important tasks in the deformation analysis of geodetic networks is the selection of the optimal datum solution for the parameters of geodetic networks. Among deformation analysis methods that have been researched for theoretical and practical applications, it is important to mention the methods of conventional deformation analysis (CDA) [
1,
2,
3,
4,
5,
6,
7,
8,
9,
10,
11,
12,
13] and methods of robust deformation analysis (RDA) based on M estimation [
14,
15,
16,
17,
18,
19,
20,
21,
22], M
split estimation [
23,
24,
25,
26,
27,
28,
29,
30,
31,
32] and R estimation [
33,
34,
35]. In conventional deformation analysis, it is essential to identify stable datum points, i.e., potential reference points (PRPs) of the network stabilised outside the zone of expected deformations. On the other hand, RDA methods are robust to the existence of displaced points in the potential reference part of the network, which makes them more convenient and simpler to apply than CDA methods. A number of studies can be found in the literature that analyse the efficiency of RDA methods in identifying displaced points by applying Monte Carlo simulations, and they have shown that these methods can be a significant alternative to CDA methods.
Deformation measurements of engineering facilities such as dams, bridges, tunnels, towers, etc., are mostly taken over short periods, except in cases when it is extremely important to monitor the object in a continuous manner. Reference [
36] provides an overview of geodetic and global navigation satellite system (GNSS) sensors in order to carry out precise dam measurements. This review paper also presents the possibilities of terrestrial laser scanning, ground-based InSAR and advanced spaceborne DInSAR technology for monitoring the displacement and deformation of engineering facilities, in addition to traditional geodetic techniques and conventional deformation analysis. In the case of short-period measurements, it is possible to use identical equipment and observation plans in all measurement epochs. Hence, it is interesting to analyse the effects of constant errors that classical RDA methods based on M estimations, such as iterative weighted similarity transformation (IWST) [
14] and its modifications based on the introduction of different optimisation conditions of robust estimation [
15,
19], cannot completely eliminate. Therefore, in the case of short-period measurements, the application of an alternative method called generalised robust estimation of deformation from observation differences (GREDOD) [
18,
19] has been proposed, because it completely eliminates the influence of systematic errors that burden the measurement results in certain epochs. In RDA methods based on M estimations, such as IWST and GREDOD methods, there are some shortcomings related to the statistical significance test of displacement. Consequently, there have been studies that aimed to overcome these problems [
21].
RDA methods are widely used in the deformation analysis of geodetic networks. For example, the IWST method was used for the deformation analysis of the geodetic network of the Tevatron atomic particle accelerator complex at the Fermilab laboratory in the USA [
37], which consists of about 2000 points. This method has also been implemented in the automated monitoring system “ALERT” developed by the Canadian Centre for Geodetic Engineering [
38] and in GeoLab software for geodetic computation [
39]. Furthermore, Reference [
40] presents the application of the IWST method in combination with fibre optic sensors.
The selection of the optimal datum solution, regardless of the applied method, is a key step in the deformation analysis of geodetic networks, always with the aim of obtaining objective results. This primarily refers to geodetic networks of larger areas, where there may be diverse and dispersive causes of displacement in the geological sense, which may make it difficult to obtain an objective estimation. In this context, it is important to mention metaheuristic optimisation algorithms, such as simulated annealing (SA) and Hooke–Jeeves (HJ) algorithms, which can be used to identify a group of stable reference points, i.e., the optimal datum solution. Reference [
41] showed that SA and HJ algorithms significantly contributed to the final decision in the process of identifying a group of stable reference points. In addition, the application of evolutionary optimisation algorithms—more precisely, the genetic algorithm (GA) and generalised particle swarm optimisation (GPSO) algorithm—in the robust estimation of the displacement vector in the IWST method was proposed and explained in Reference [
22]. This significantly improves the efficiency of identifying displaced points on an object.
This paper analyses the GREDOD method, which represents a more recent alternative to the IWST method, from the aspect of applying some evolutionary optimisation algorithms in the robust estimation of the displacement vector. The deformation analysis procedure in the GREDOD method takes place in two phases: the robust estimation of the displacement vector and stability analysis of network points. The procedure of the robust estimation of the displacement vector comes down to solving the optimisation problem that is formed by the appropriate deformation model and objective functions. By solving the optimisation problem of the GREDOD method, the optimal weight values of the network PRPs, i.e., the datum points of the network, are determined. The values of these weights represent the contribution of each PRP to the datum definition of the displacement vector.
This optimisation problem can be seen as a problem of determining the optimal datum of the displacement vector. In order to solve it, the iterative reweighted least-squares (IRLS) method [
42] from the group of deterministic optimisation procedures is usually applied. The IRLS method starts from one initial solution obtained by the least-squares method and iteratively improves it during the optimisation process. However, if the initial solution is not in the vicinity of the real solution, it is not possible to determine the global optimal solution of the optimisation problem of the GREDOD method by applying the IRLS method [
43].
Since the least-squares method is very sensitive to deviations from the model assumptions [
44], it is quite clear that the initial solution can be significantly far from the real solution if the set of PRPs of the network contains displaced points, because in that case, the displacement vector follows a contaminated normal distribution. The distance of the initial from the real solution increases with the increasing contamination of the normal distribution, i.e., with an increase in the number of displaced network PRPs. Therefore, the efficiency of the IRLS method decreases with the increasing number of displaced PRPs, while the error of determining the optimal datum of the displacement vector increases.
In this context, it is evident that the optimisation problem of the GREDOD method should be considered from the global optimisation point of view. Consequently, this paper proposes the application of the GA and GPSO algorithms in the process of robust estimation of the displacement vector in the GREDOD method. It is important to point out that these algorithms search the solution space in a controlled random manner, which allows them to "jump out" of the local optimum in order to find the global optimum. The efficiency of applying the GA and GPSO algorithms in the robust estimation of the displacement vector in the GREDOD method is analysed using the mean success rate (MSR) based on Monte Carlo simulations. The results presented in this paper show that a significant increase in the robustness of the GREDOD method can be achieved using the proposed optimisation algorithms. This can certainly provide more reliable results when using the GREDOD method in practical applications in the area of geodetic monitoring of engineering facilities.
3. Results and Discussion
The primary goal of the experimental research presented in this paper was to analyse the efficiency of the proposed modification of the GREDOD method. This modification is based on the application of the GA and GPSO algorithms in the robust estimation of the displacement vector. The deformation analysis procedure is considered efficient if all displaced points of the geodetic network are identified as unstable, and all undisplaced points are identified as stable [
6,
20]. It is generally known that the efficiency analysis of deformation analysis methods cannot be based on only one set of real observations consisting of two or more measurement epochs in a geodetic network, because in that case, the efficiency analysis refers to only one model of the geodetic network, one set of random measurement errors and one of a multitude of possible displacement and deformation scenarios. In addition, the fact that, in this case, it is not known which network points are really displaced clearly shows that the efficiency of the deformation analysis methods cannot be analysed. Accordingly, their efficiency was analysed by using Monte Carlo simulations and applying MSR. Here, efficiency conclusions were drawn based on a large number of simulated observation sets representing different displacement and deformation scenarios in the geodetic networks that are the subject of analysis. The procedures for generating simulated observation sets and efficiency analysis of deformation analysis methods are discussed in detail in the literature [
6,
11,
13,
20,
22].
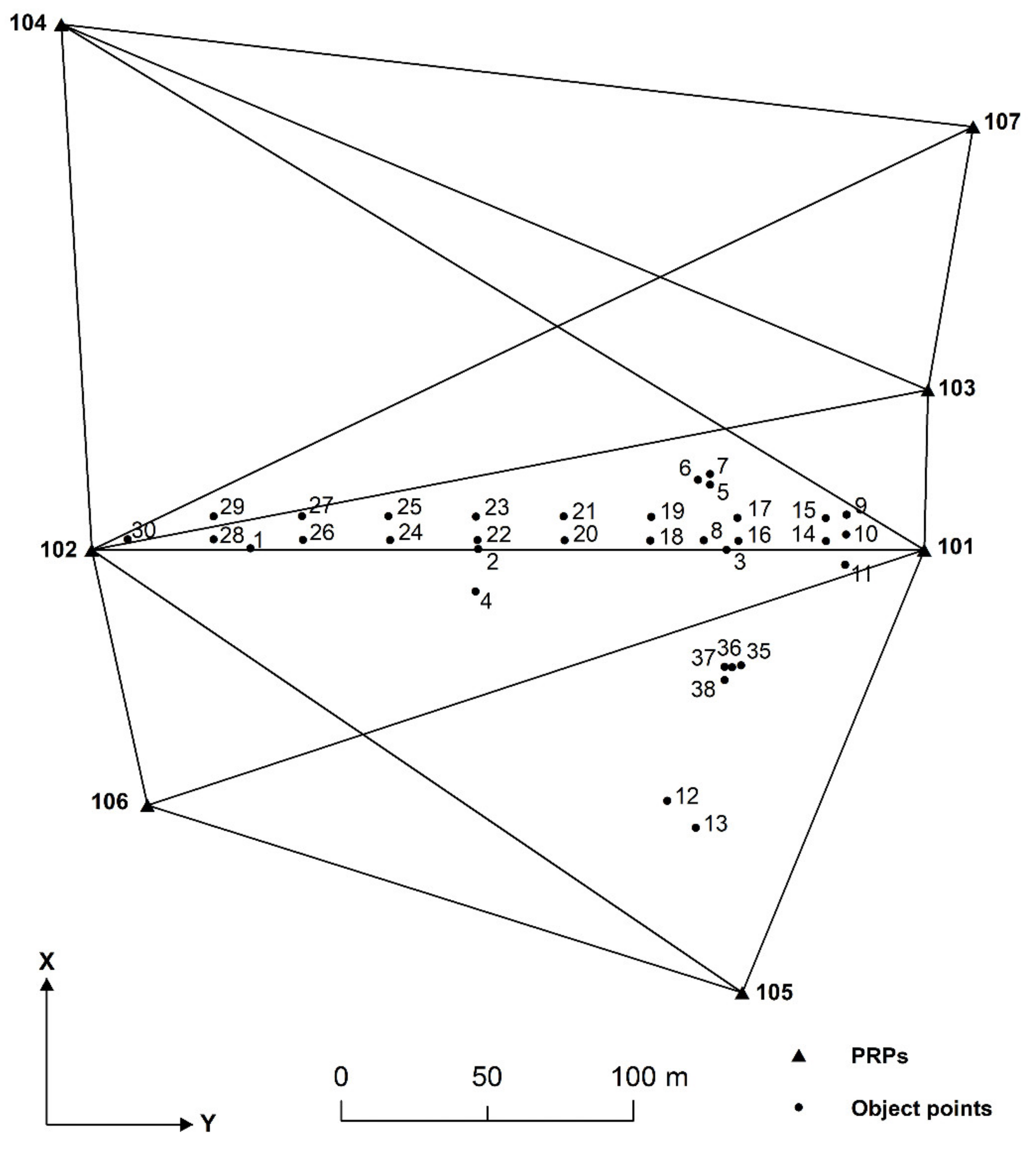
The efficiency analysis of the proposed modification of the GREDOD method was performed on a test sample generated for the needs of experimental research presented in [
22], which consists of 120,000 simulated observation sets in the geodetic network for displacement and deformation monitoring of the Šelevrenac embankment dam. This test sample includes the following three variants of object points displacement:
Variant 1—one randomly selected object point is displaced ();
Variant 2—two randomly selected object points are displaced ();
Variant 3—three randomly selected object points are displaced ().
Each of the defined variants of object points displacement includes eight different cases of network PRPs displacement:
All PRPs are undisplaced ();
One randomly selected PRP is displaced ();
Two randomly selected PRPs are displaced ();
Three randomly selected PRPs are displaced ();
Four randomly selected PRPs are displaced ();
Five randomly selected PRPs are displaced ();
Six randomly selected PRPs are displaced ();
All PRPs are displaced ().
It is important to note that the magnitudes of the displacement vectors of PRPs and object points (
and
) take values from the interval
, where
is the radius of the displacement sphere whose volume is equal to the volume of the corresponding displacement ellipsoid [
22]. For each of the eight previously mentioned cases of PRPs displacement, 5000 simulated observation sets were generated within all three variants of object points displacement. It should also be noted that the observations were simulated together with random measurement errors that follow a normal distribution with a mean value of zero and the standard deviations for horizontal directions, slope distances and zenith angles listed in
Section 2.3.
The test sample was extended with one characteristic displacement scenario where all network points (PRPs and object points) are undisplaced
) in order to examine the false-positive rate (FPR) of the proposed GREDOD modification, as reported in [
59], where a similar procedure was conducted for outlier analysis. FPR is defined as the number of false-positive rates divided by the total number of experiments. In this scenario, 5000 simulated observation sets were generated, as explained in [
22]. These observations were simulated together with random measurement errors that follow a normal distribution, as explained in the previous paragraph. All simulations were conducted using the Monte Carlo method implemented in the Matlab software package. This test sample is available in [
60].
The deformation analysis was performed on each set of simulated observations using the GREDOD method, whereby the GA and GPSO algorithms were applied in addition to the IRLS method in the process of robust estimation of the displacement vector. The values of the IRLS method parameters were adopted based on empirical analysis of the optimisation process. Values of 0.01 mm and 0.001 mm were adopted for the constant and tolerance , while a value of 0.0001 was adopted for the weights of object points .
Based on the adopted values of the IRLS method parameters and expression (17), the constraint was defined, specifying the feasible search region. This constraint was integrated into objective function (18) by the penalty function method, where the value was adopted for the weight coefficient of the penalty .
Schemes for setting the parameters of the GA and GPSO algorithms were adopted in accordance with the recommendations in the literature [
48,
51]. The selection of individuals was performed using stochastic uniform selection with linear ranking, a crossover of individuals using a uniform crossover scheme and gene mutation by simple random change using a normal distribution. It is important to note that the change in generations was carried out by applying an elitist strategy, where 5% of the best individuals from the population are directly transferred to the next generation. In the GPSO algorithm, the parameters
and
decrease linearly within the ranges
and
, respectively, during the optimisation process, while the parameter
takes values from the range
using a uniform distribution.
When the population (swarm) size and the stopping criterion are considered, it is generally very difficult to provide a strong recommendation in advance on how to set their values. This characteristic problem is usually solved by applying the trial-and-error method. In this study, for the size of the population (swarm), i.e., the number of individuals (particles), the value 400 was adopted. The stopping criterion is defined by the maximum number of generations (iterations) and tolerance. The values 100 and were adopted for these parameters, respectively. By performing an empirical analysis of the optimisation process convergence, which was conducted on several sets of simulated observations that reflect different displacement and deformation scenarios, it was confirmed that these parameter values provide satisfactory results.
This specifies all parameter values necessary for the application of the IRLS method, GA and GPSO algorithm in the robust estimation of the displacement vector in the GREDOD method. The next phase in the deformation analysis procedure is to examine the stability of the network points using Fisher’s test of statistical significance. For the global significance level , the value 0.05 was adopted in this test, so the local significance level was 0.00125.
The MSRs of the GREDOD method were independently calculated for each of the eight analysed cases of PRPs displacement in all three variants of object points displacement. The FPRs of the GREDOD and IWST methods were calculated for the scenario where all points (PRPs and object points) are undisplaced. It is important to note that in this paper, the deformation analysis procedure is considered successful if all displaced object points are identified as unstable, and all undisplaced object points are identified as stable.
The obtained results are directly comparable to the results presented in [
22], where the efficiency of the IWST method when applying the IRLS method, GA and GPSO algorithm in the robust estimation of the displacement vector was analysed on the same test sample. Accordingly, in the following, among other things, a comparative analysis of the efficiency of the IWST and GREDOD methods is presented.
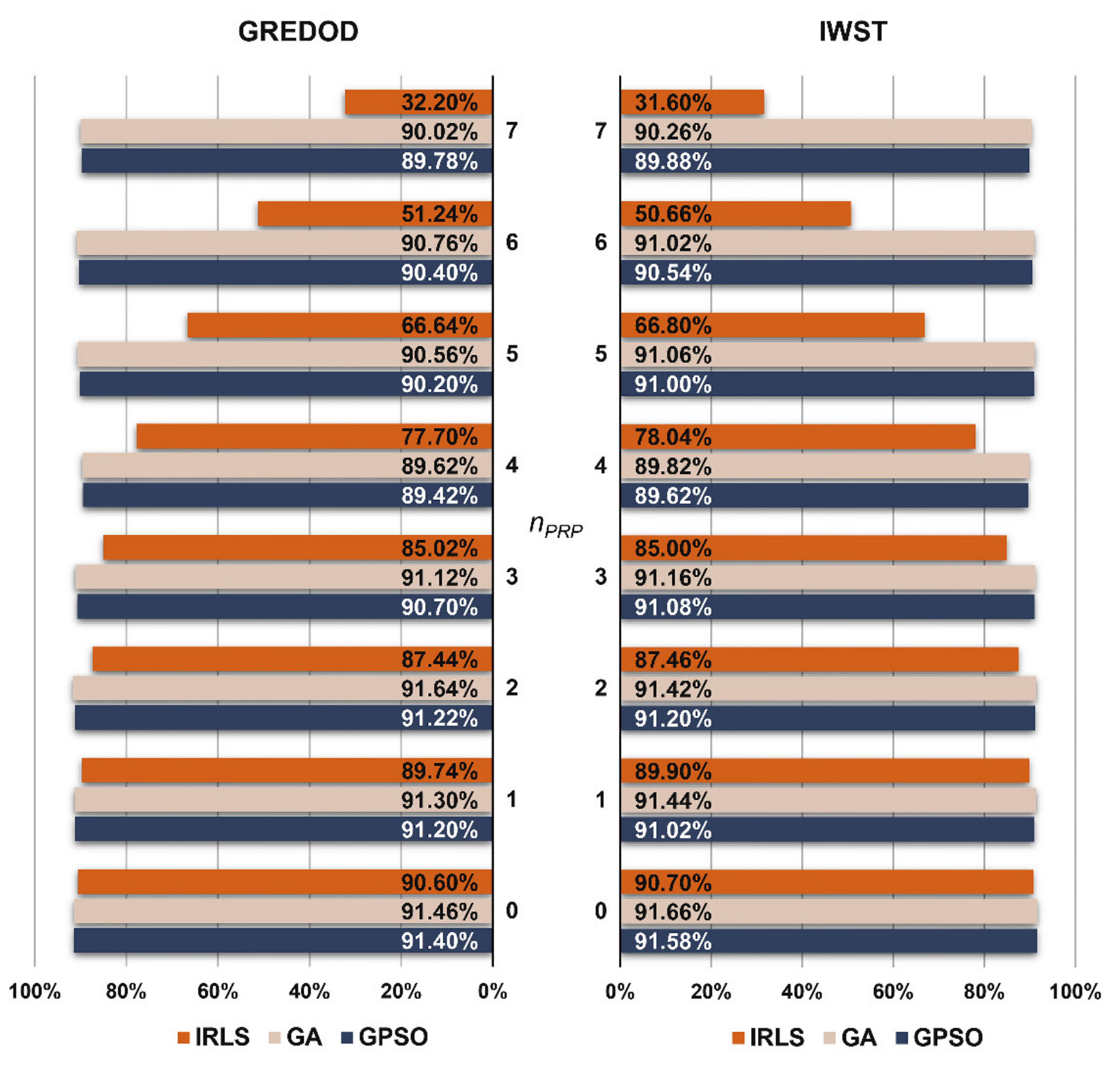
The MSRs of the GREDOD method related to the first variant of object point displacement are presented in the form of diagrams on the left-hand side of
Figure 3. It is evident that in the case of the IRLS method, the efficiency of the GREDOD method decreases significantly with the increasing number of displaced PRPs
, while in the case of applying the GA and GPSO algorithms, the efficiency does not change significantly. In order to explain these conclusions in more detail, two characteristic cases of point displacement in a potential reference network are analysed below. If the first case of displacement is observed (
), it can be seen that applying all three optimisation procedures (IRLS, GA and GPSO) results in very similar values of MSRs. In addition, the case in which all PRPs are displaced (
) is also considered. The efficiency of the GREDOD method is 57.82% and 57.58% higher when applying the GA and GPSO algorithms, respectively, than in the case of the IRLS method. The diagram on the right-hand side of
Figure 3 presents MSRs obtained using the IWST method in [
22], presented for reference and comparison purposes. It can be observed that the efficiency of the IWST and GREDOD methods is very similar in all eight cases of PRPs displacement. Differences in efficiency between the IWST and GREDOD methods in the cases of the IRLS method, GA and GPSO algorithms range from 0.02% to 0.60%, from 0.04% to 0.50% and from 0.02% to 0.80%, respectively.
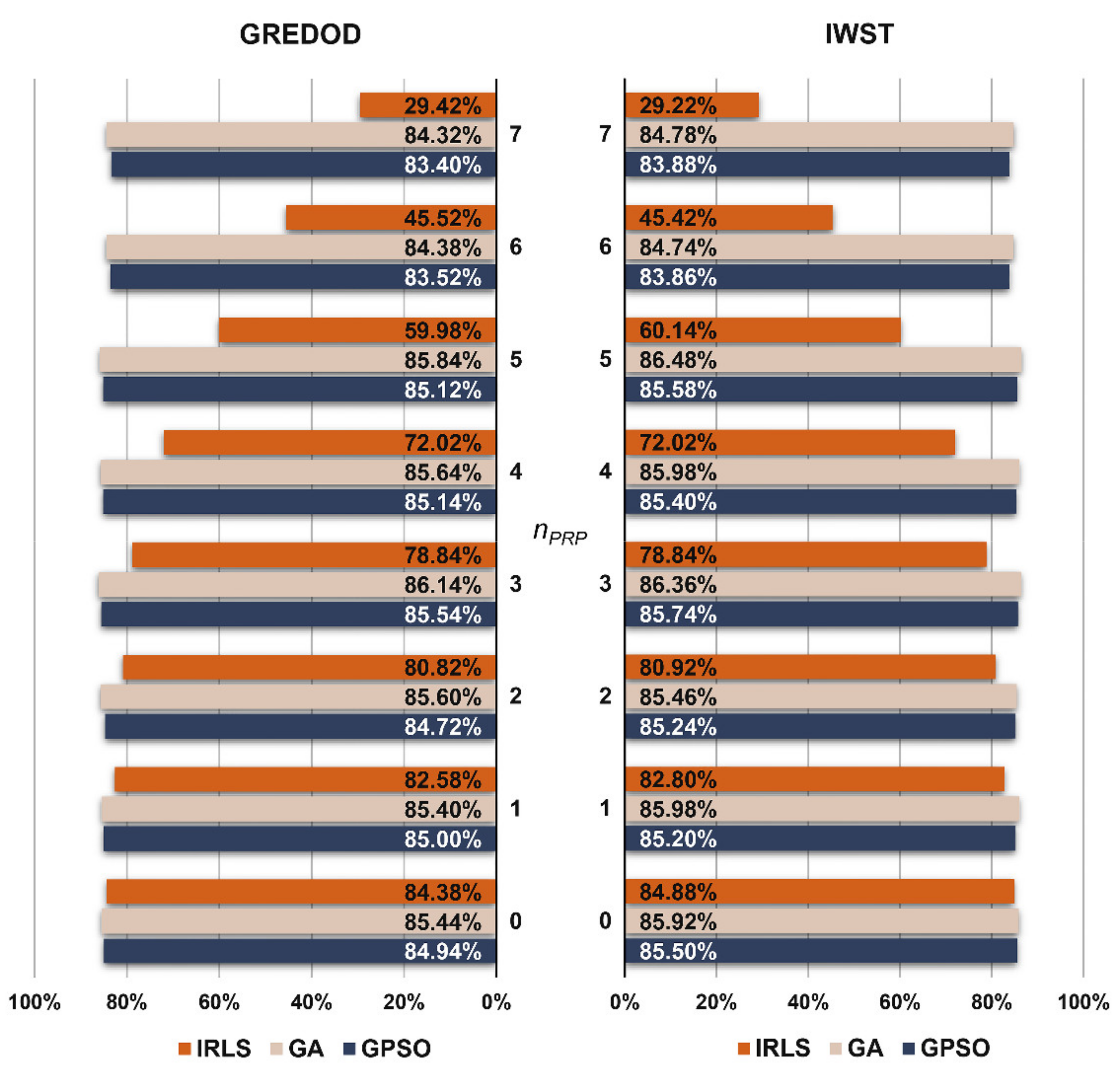
Figure 4 presents the MSRs of the GREDOD method and refers to the second variant of object points displacement. It is obvious that when applying the GA and GPSO algorithms, the GREDOD method efficiency does not change significantly with an increasing number of displaced PRPs
, while in the case of the IRLS method, its efficiency decreases significantly. These conclusions are fully consistent with the conclusions derived from the analysis of the results obtained for the first variant (
). However, it should be noted that for this variant, the GREDOD method efficiency is about 6% lower on average compared to the previous variant. This diagram (
Figure 4, right) also shows the MSRs of the IWST method obtained in [
22]. It is evident that the efficiency of the IWST and GREDOD methods is very similar in all eight cases of point displacement in a potential reference network.
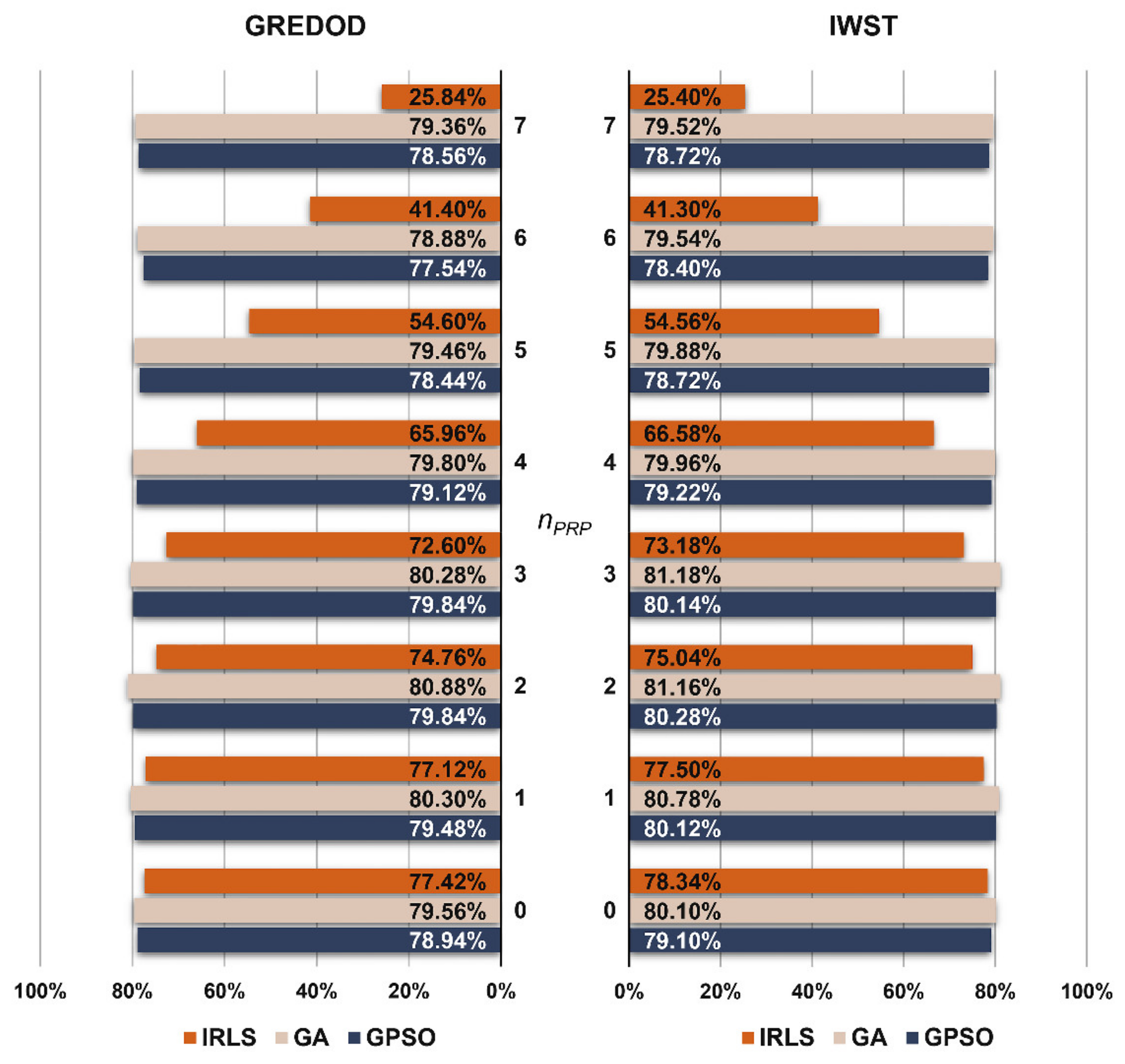
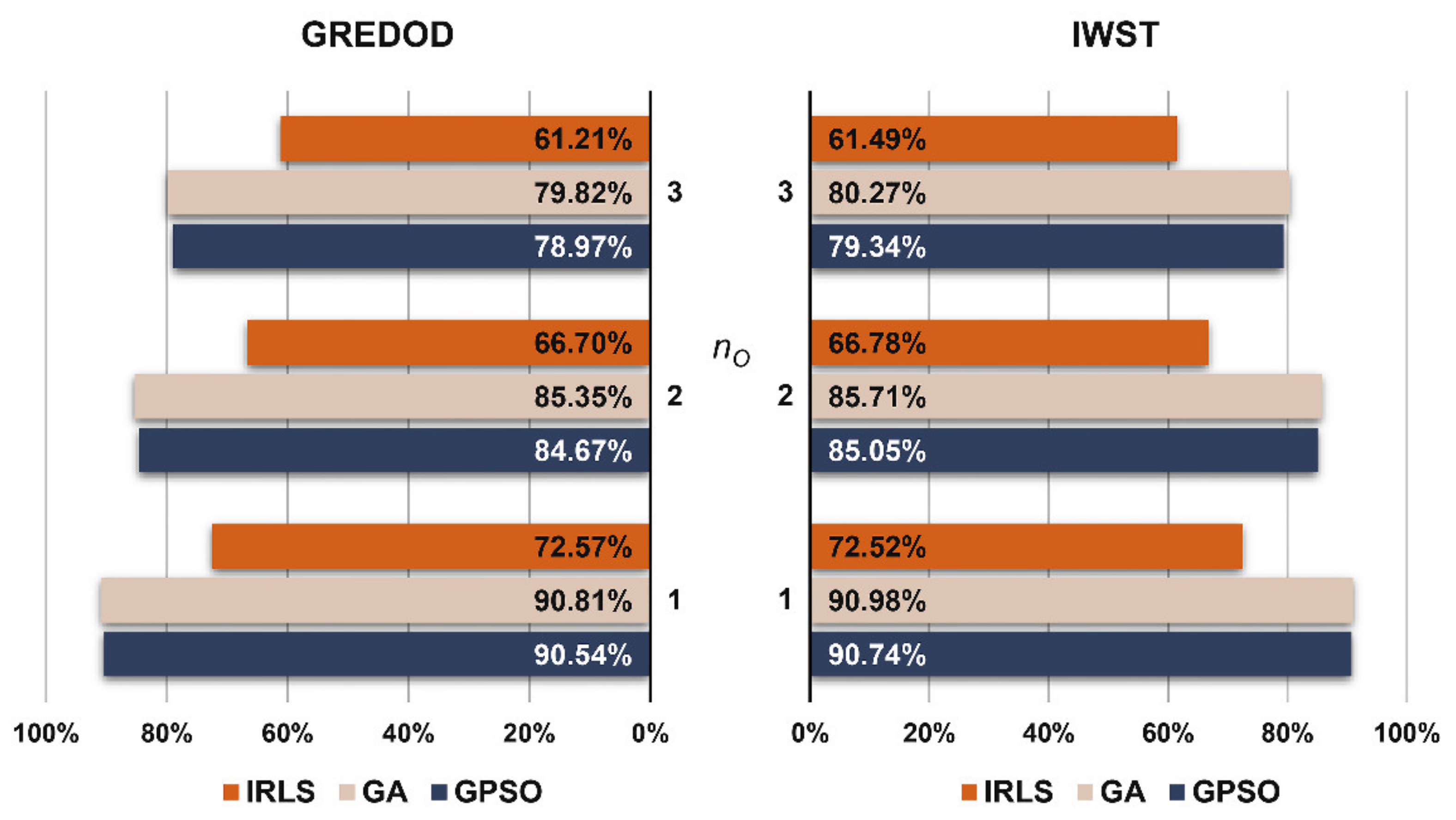
The MSRs of the GREDOD and IWST methods related to the third variant, where three randomly selected object points are always displaced, are shown in the diagram in
Figure 5. All previously drawn conclusions related to the GREDOD method efficiency behaviour when applying the IRLS method, GA and GPSO algorithm are also valid for this variant of object points displacement. It is important to note that the GREDOD method efficiency is about 11% lower on average compared to the first variant. In addition, it is seen that for this variant of object points displacement, the efficiency of the IWST and GREDOD methods is very close in all eight cases of PRPs displacement. The MSRs of the IWST method are taken from [
22].
Based on the values of the MSRs, the overall efficiency values of the GREDOD method were calculated for all three variants of object points displacement. The overall efficiency is defined as the arithmetic mean value of the MSRs related to individual cases of PRPs displacement. The overall efficiency values of the GREDOD and IWST methods are presented in the form of diagrams in
Figure 6, where the overall efficiency values of the IWST method are taken from Reference [
22]. It is obvious that the GREDOD method efficiency decreases with an increasing number of displaced object points
when applying all three optimisation procedures. This problem can be successfully solved using a strategy based on dividing the geodetic network into as many subnetworks as there are object points, where each subnetwork consists of all PRPs and only one object point [
8,
13]. In addition, it is seen that the GREDOD method efficiency is significantly improved by applying the GA and GPSO algorithms in the robust estimation of the displacement vector. The improvement percentages of the overall efficiency of the GREDOD method range from 18.24% to 18.65% with the genetic algorithm and from 17.76% to 17.97% with the GPSO algorithm. It is important to point out that these values represent relative increases in the GREDOD method efficiency in relation to the efficiency obtained by applying the IRLS method. In addition, it can be seen that the values of the overall efficiency of the IWST and GREDOD methods are very close for all three variants of object points displacement.
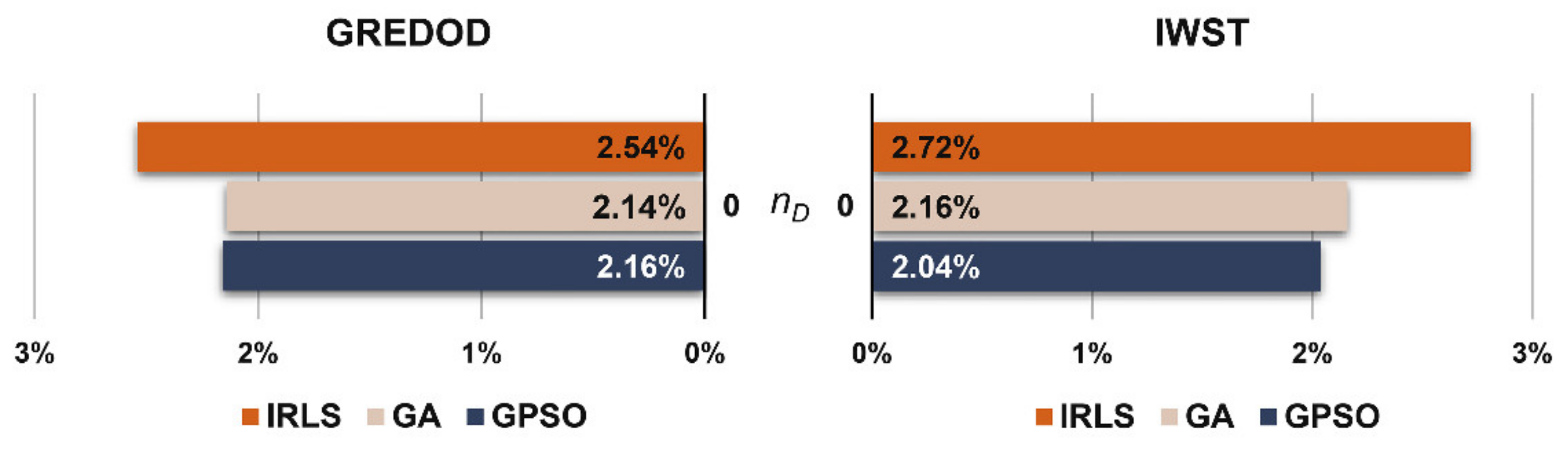
The FPRs of the GREDOD and IWST methods related to the displacement scenario where all network points are undisplaced (
) are shown in the diagram in
Figure 7. It can be observed that the FPRs of the GREDOD and IWST methods are slightly higher with the IRLS method than with the GA and GPSO algorithms. The FPR of the GREDOD method is 0.40% lower for GA and 0.38% lower for the GPSO algorithm compared to the IRLS method application. The FPR of the IWST method is 0.56% lower for GA and 0.68% lower for the GPSO algorithm.
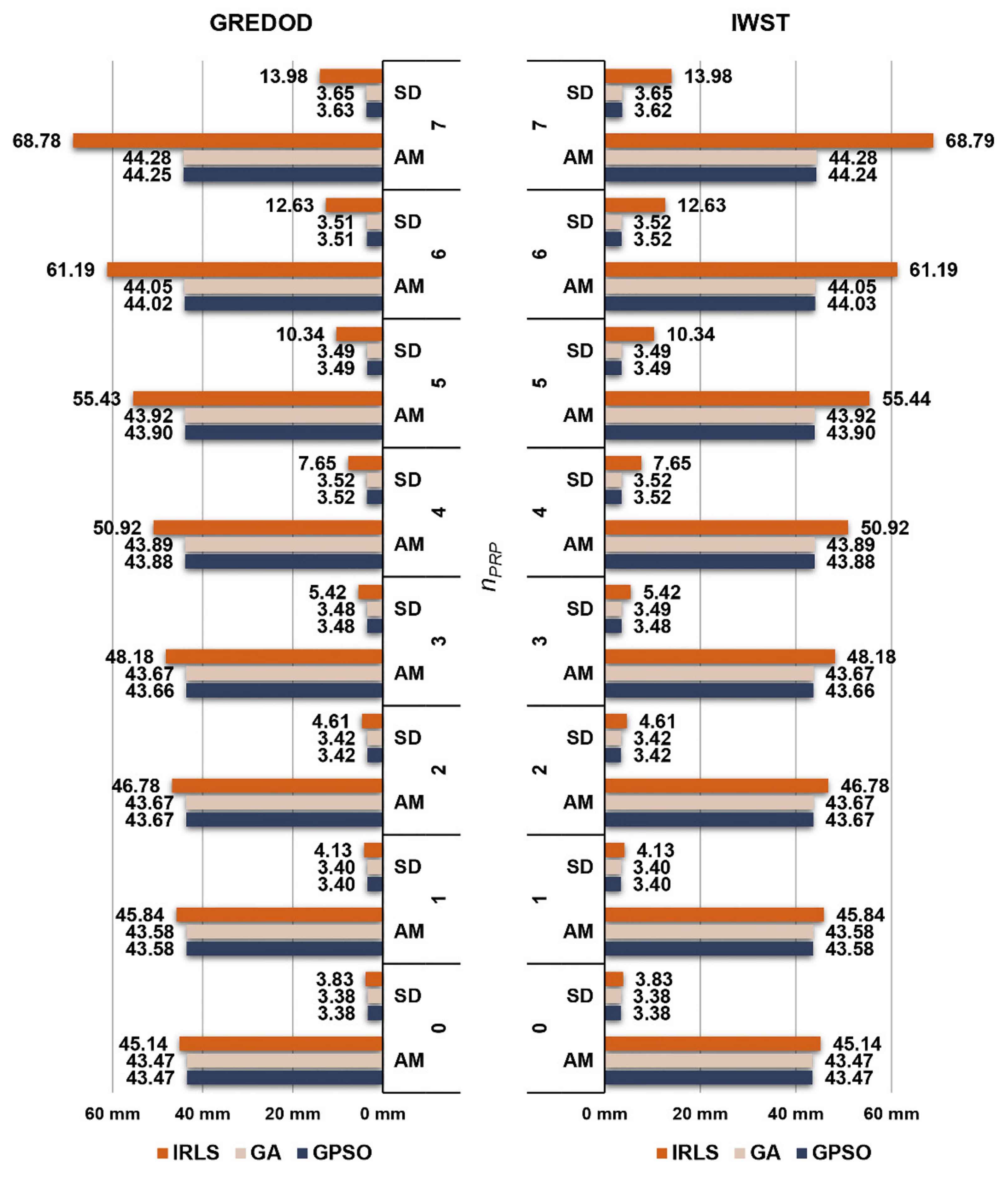
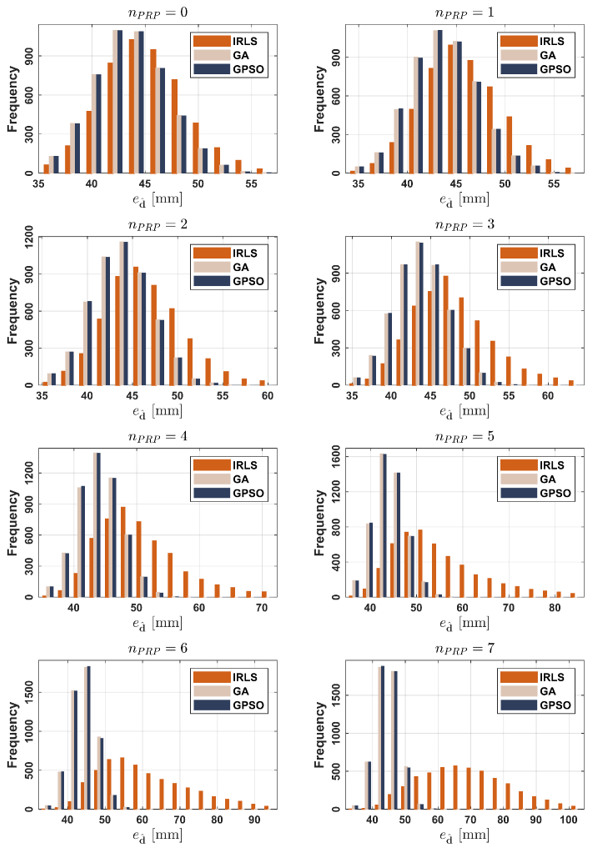
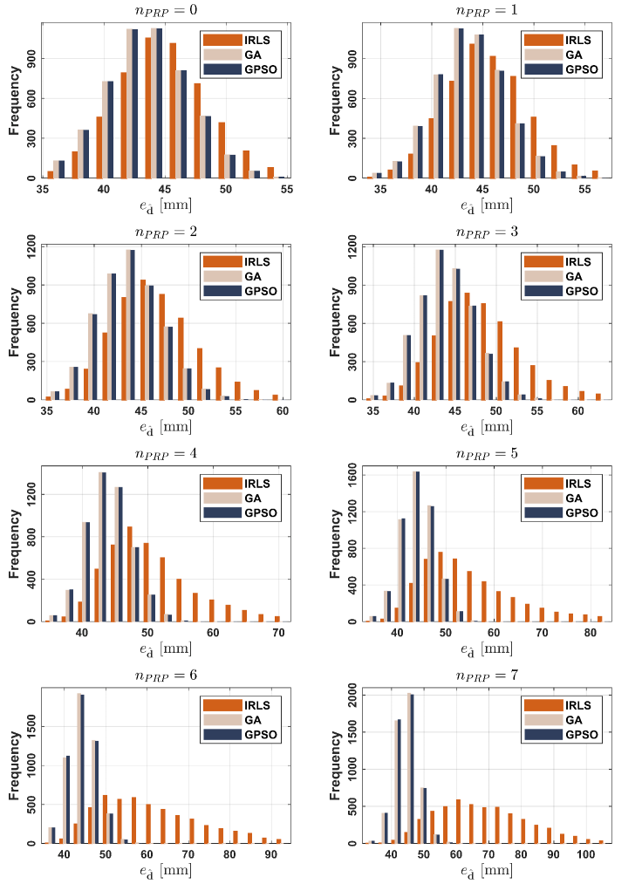
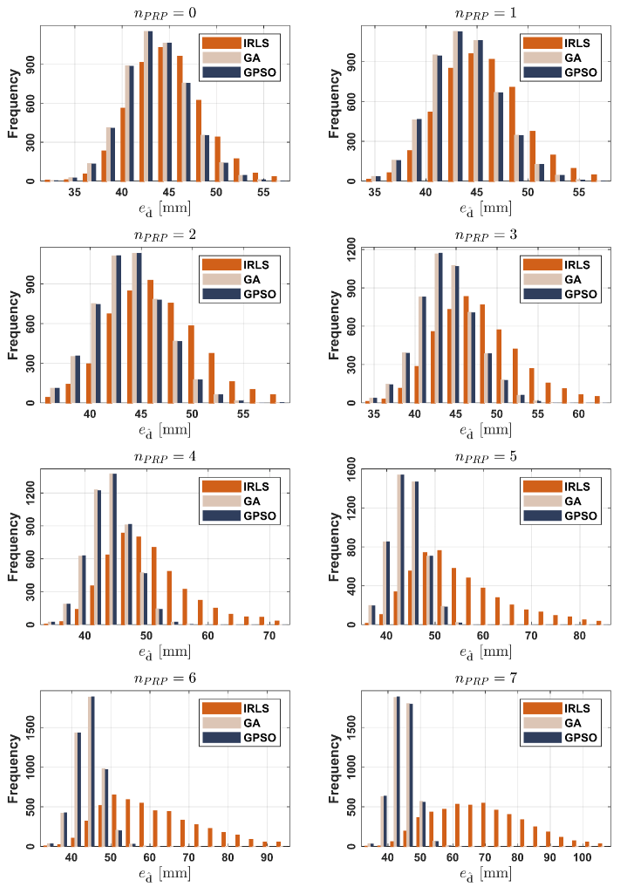
Additional analysis of the obtained results was conducted based on the values of the overall absolute true errors of the estimated displacement vectors, determined by using all three optimisation algorithms (IRLS, GA and GPSO) with the GREDOD method, for each set of simulated observations. The overall absolute true error of the estimated displacement vector is defined as
where
and
are components of the simulated and estimated displacement vectors, respectively.
Figure A1,
Figure A2 and
Figure A3 (
Appendix A) present the empirical distributions of these errors, which refer to the first, second and third variants of object points displacement, respectively. Arithmetic mean values and standard deviations of the mentioned errors were independently calculated for each of the eight cases of PRPs displacement within all three variants of object points displacement.
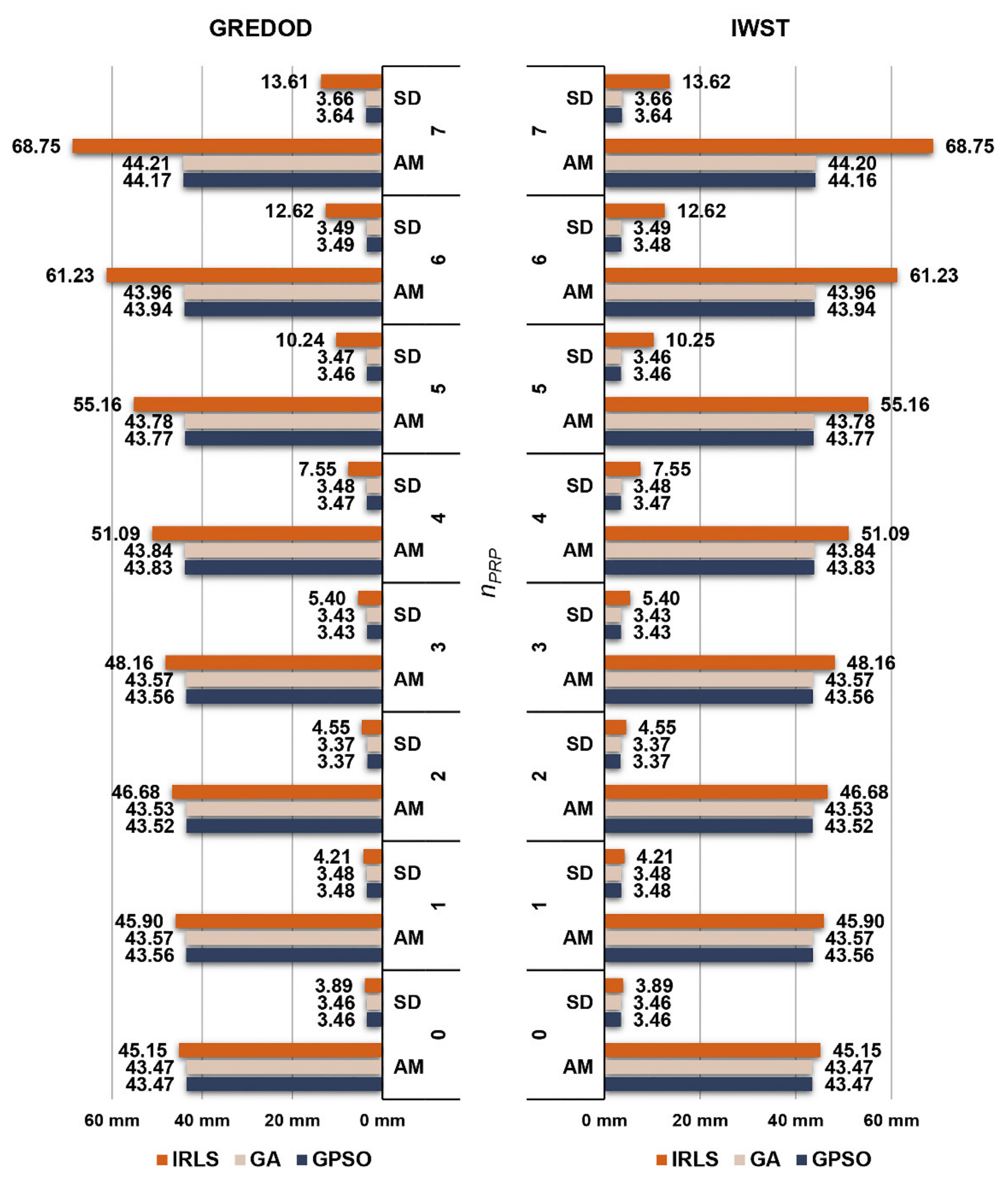
Figure 8 depicts the arithmetic mean values and standard deviations of the overall absolute true errors of the estimated displacement vectors of the GREDOD method when one randomly selected object point is displaced (variant 1). When the GA and GPSO algorithms are applied, one can note that there is no significant change in the arithmetic mean values or standard deviations of these errors with an increasing number of displaced PRPs,
. On the other hand, when the IRLS method is applied, these values evidently increase as
increases. The right-hand side of
Figure 8 depicts the same values for the IWST method. These values are taken from [
22] in order to make a comparison of these two methods. It is notable that arithmetic mean values and standard deviations of the overall absolute true errors of the estimated displacement vectors are almost identical between the IWST and GREDOD methods.
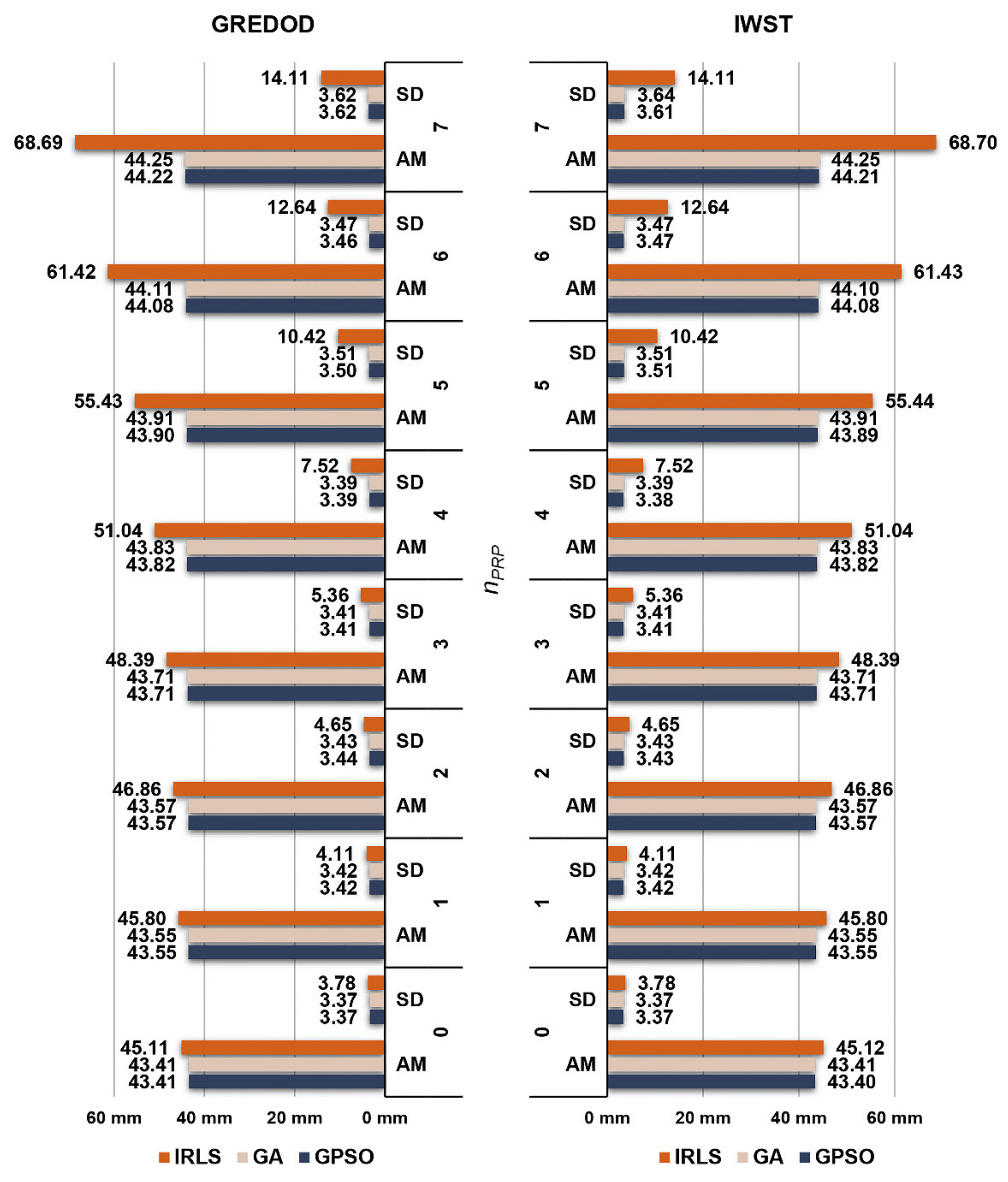
The arithmetic mean values and standard deviations of the overall absolute true errors of the estimated displacement vectors of the IWST and GREDOD methods related to the second and third variants of the object points displacement are shown in the form of diagrams in
Figure 9 and
Figure 10 respectively. The arithmetic mean values and standard deviations of these errors of the IWST method are taken from [
22] for the purpose of comparative analysis of the results obtained using the IWST and GREDOD methods. Since the arithmetic mean values and standard deviations of these errors are very similar for all three variants of object points displacement, all previously drawn conclusions regarding the behaviour of these errors in the case of the IRLS method, GA and GPSO algorithm are valid for these two variants of object points displacement. In addition, it is seen that the behaviour of the overall true errors of the estimated displacement vectors is consistent with the efficiency behaviour of the IWST and GREDOD methods.
In addition to the above-presented results, the computational effort needed to apply the described methods must also be considered. The calculation time for both the GA and GPSO algorithms is longer compared to the IRLS method. The calculation time for the GA and GPSO algorithms is directly related to parameter values such as population size and stopping criteria. Comparing the GA and GPSO algorithms, it is notable that the GPSO algorithm works faster, because the calculations are simpler.
A general conclusion regarding computational effort is that GA is slightly more efficient than the GPSO algorithm, but it demands more calculation effort. Therefore, it is more suitable to use GA when time is not crucial. For some real-time applications, the GPSO algorithm is generally a much better choice.
4. Conclusions
This paper presents an original modification of the GREDOD method based on the application of two evolutionary optimisation algorithms, the GA and GPSO algorithms, in the robust estimation process of the displacement vector. In this procedure, the optimal weight values of the PRPs are determined. This is achieved by solving the optimisation problem formed by the deformation model defined by expressions (4) and (5) and objective functions (6) and (7). Since the weight values illustrate the contribution of each PRP to the datum definition of the displacement vector, the optimisation problem of the GREDOD method can be treated as a problem of determining the optimal datum of the displacement vector. For the purpose of solving this optimisation problem, the IRLS method is traditionally applied. This method is based on the iterative improvement of one initial solution obtained by the least-squares method. The main disadvantage of this method is that it is not possible to determine a global optimal solution to the optimisation problem of the GREDOD method if displaced points appear in the set of PRPs. Accordingly, the application of the GA and GPSO algorithms in the process of robust estimation of the displacement vector is proposed. Unlike the IRLS method, the mentioned algorithms start from a series of randomly selected potential solutions (individuals or particles), which distribute the initial population (swarm) throughout the whole search space, and transform them in a controlled random manner in order to find a (near) global optimal solution for the optimisation problem. Specifically, the use of randomness allows these algorithms to “jump out” of the local optimum in order to find the global optimum. In order to apply these algorithms, the individual (particle) is defined as the weight vector of the PRPs (16), and the feasible search region is specified by (17), i.e., a constraint on the weight of PRPs, which is integrated into objective function (18) by the penalty function method. Despite being very simple, this form of penalty function has proven to be effective enough to provide quite satisfactory results in this research.
In the experimental research, a very thorough and exhaustive efficiency analysis of the application of the IRLS method, GA and GPSO algorithm in the robust estimation process of the displacement vector in the GREDOD method was performed. The efficiency of the previously mentioned optimisation procedures was analysed by applying MSR to a test sample of 125,000 simulated observation sets in the geodetic network for displacement and deformation monitoring of the embankment of the Šelevrenac dam. A comparative analysis was performed with the results obtained using a modified IWST method in which the optimisation problem is solved using the GA and GPSO algorithms [
22]. Based on the analysis of the research results, conclusions were drawn on the behaviour of the efficiency, FPRs and overall absolute true errors of the estimated displacement vector by applying the GREDOD method in the case of the IRLS method, GA and GPSO algorithm. In addition, the main advantages of evolutionary procedures compared to the classical IRLS method were highlighted. A global conclusion emerges from this analysis. The GREDOD method efficiency was significantly improved by applying the GA and GPSO algorithms in the process of robust estimation of the displacement vector, i.e., in the process of determining the optimal datum of the displacement vector. In this context, it can be concluded that by applying these algorithms, the error of determining the optimal datum of the displacement vector is significantly reduced, which increases the degree of robustness of the GREDOD method to the existence of displaced PRPs. Based on these facts, it can be concluded that the reliability of the deformation analysis results is also improved, which is very valuable for practical applications in geodetic monitoring of engineering facilities and parts of the Earth’s crust surface.
There are several possibilities for future research. In particular, evolutionary optimisation algorithms, such as GA, GPSO or other similar techniques, can be applied to solve optimisation problems of the RDA methods based on Msplit estimation. In addition, the possibility of additional improvement of the efficiency of evolutionary algorithms in solving the optimisation problem of the RDA methods, such as IWST and GREDOD methods, by applying some of the advanced forms of penalty functions can be considered. Furthermore, the efficiency analysis should include some different models of geodetic networks for monitoring the deformation and displacement of engineering facilities and the Earth’s crust surface.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}












