
An Engineering Model of Magnetic Flux Density and Electromagnetic Force Density at the Structural Discontinuity within Transformer Cores


Abstract
:1. Introduction
2. Model Development
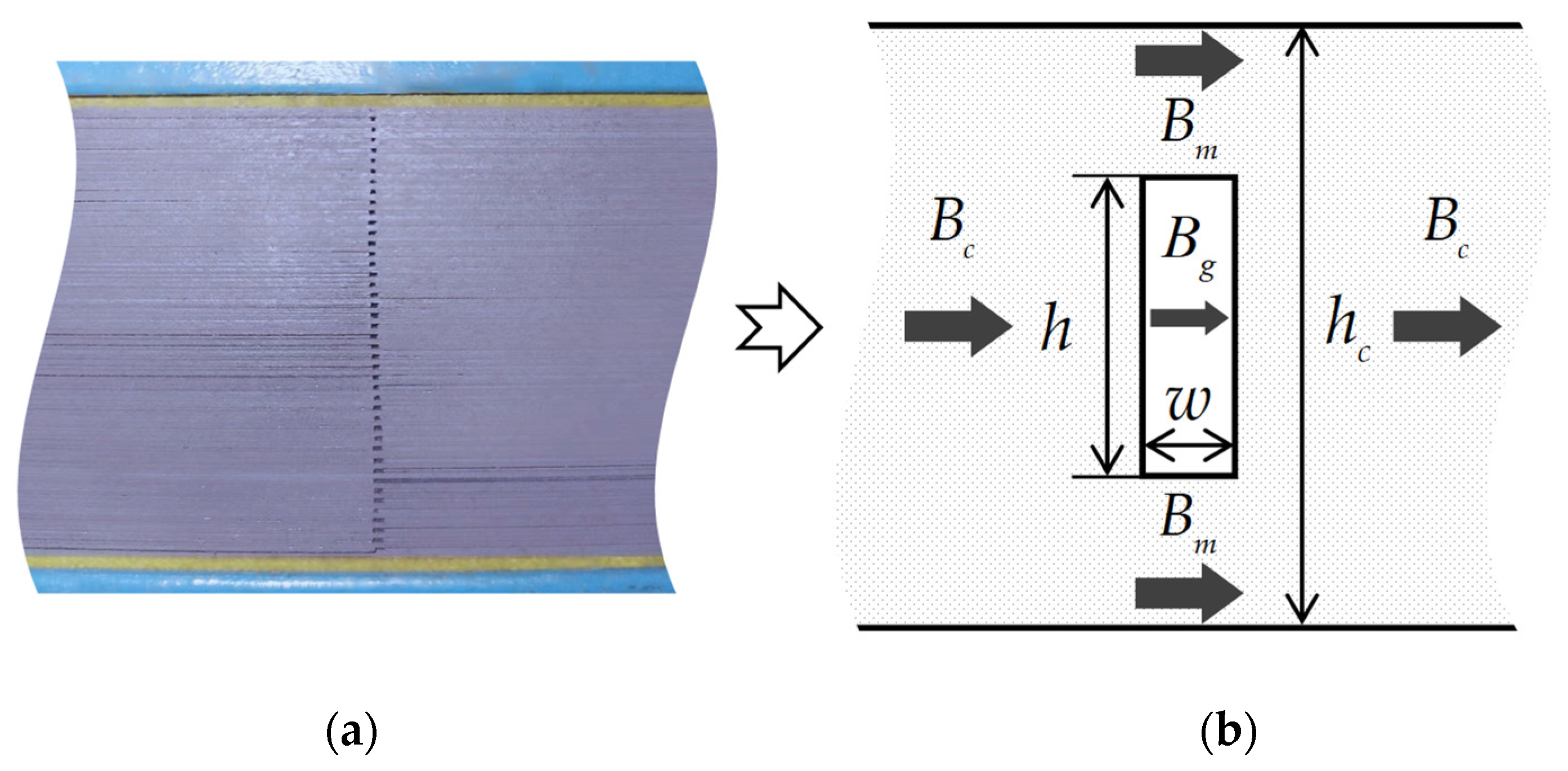
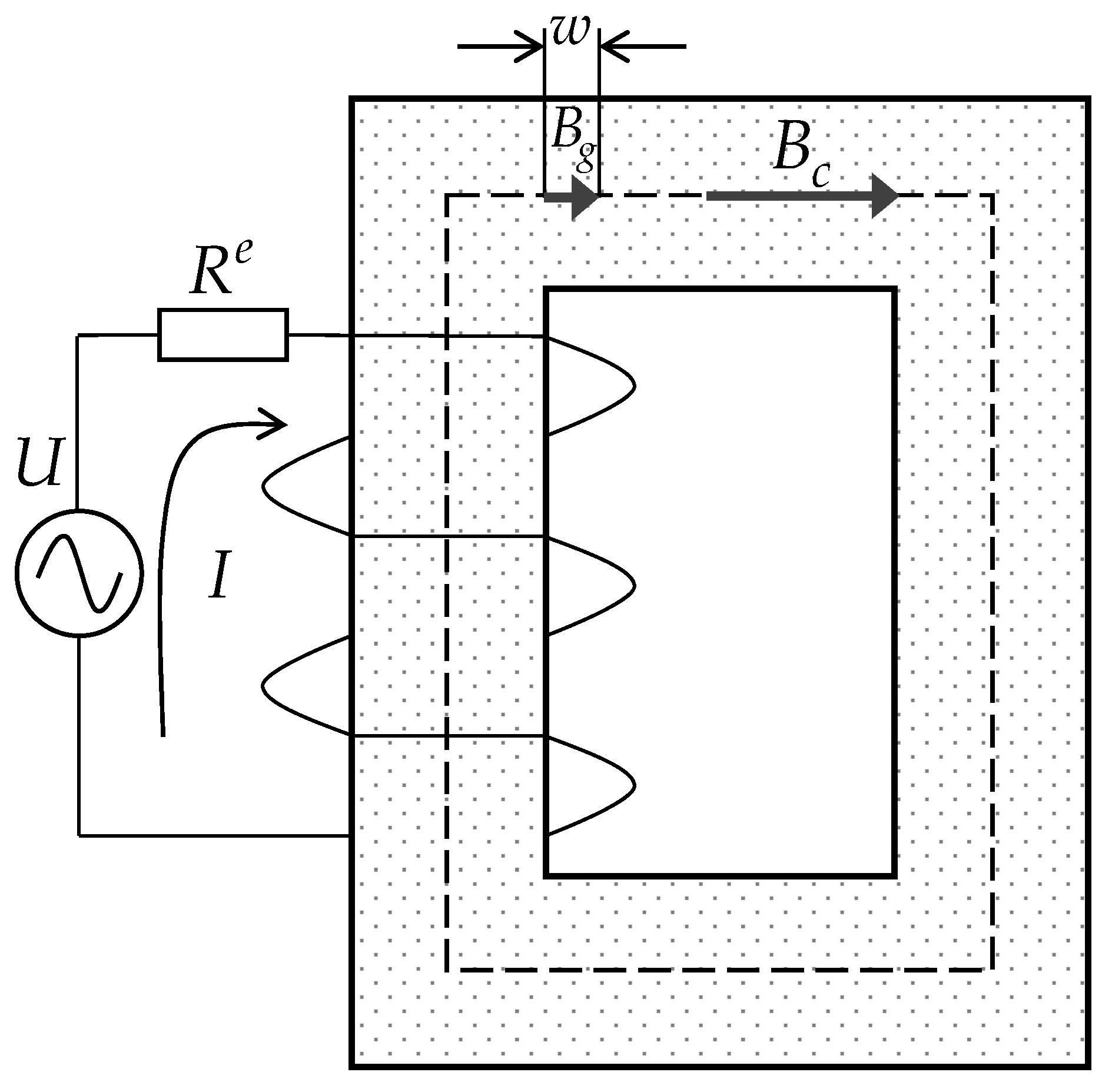
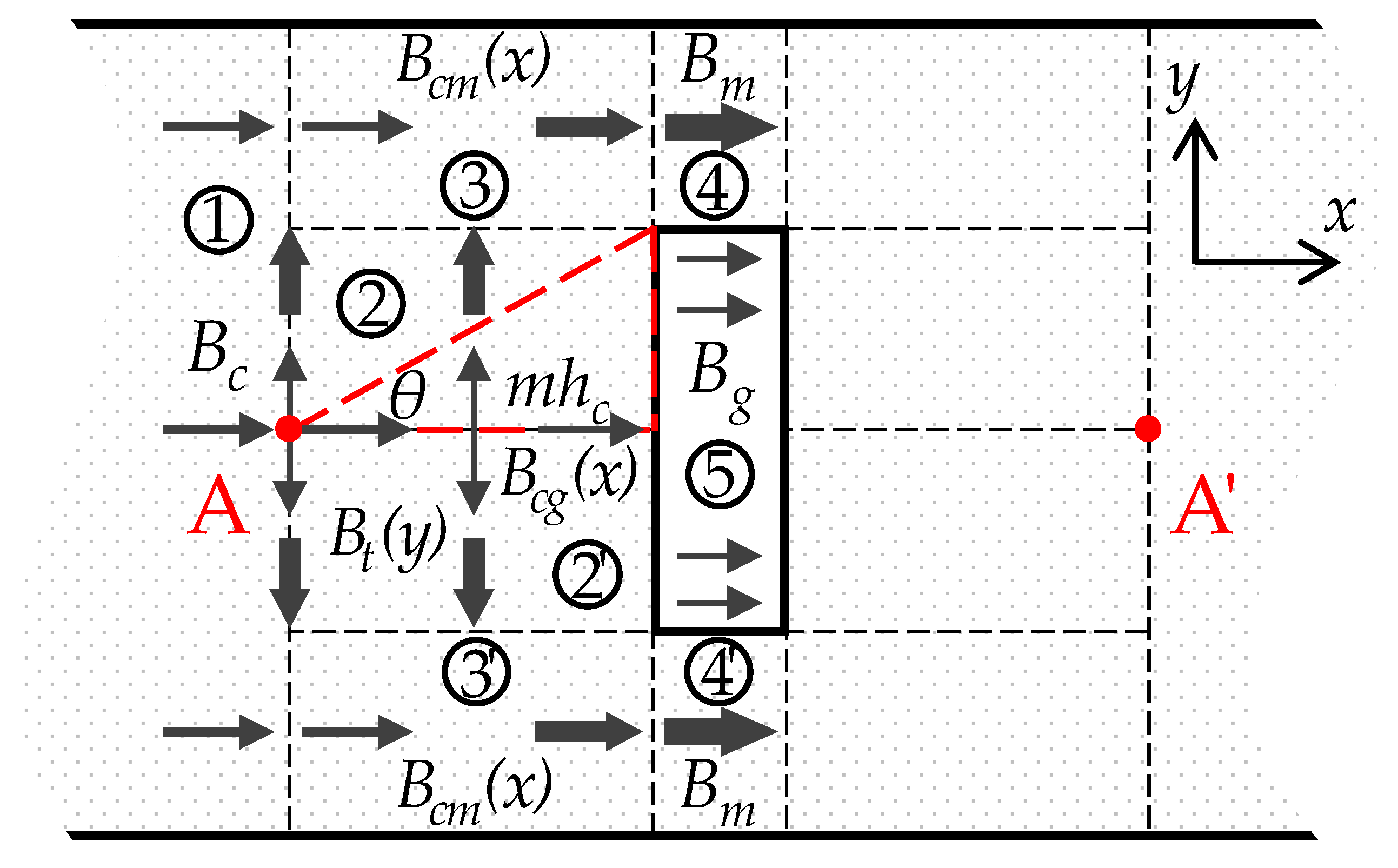
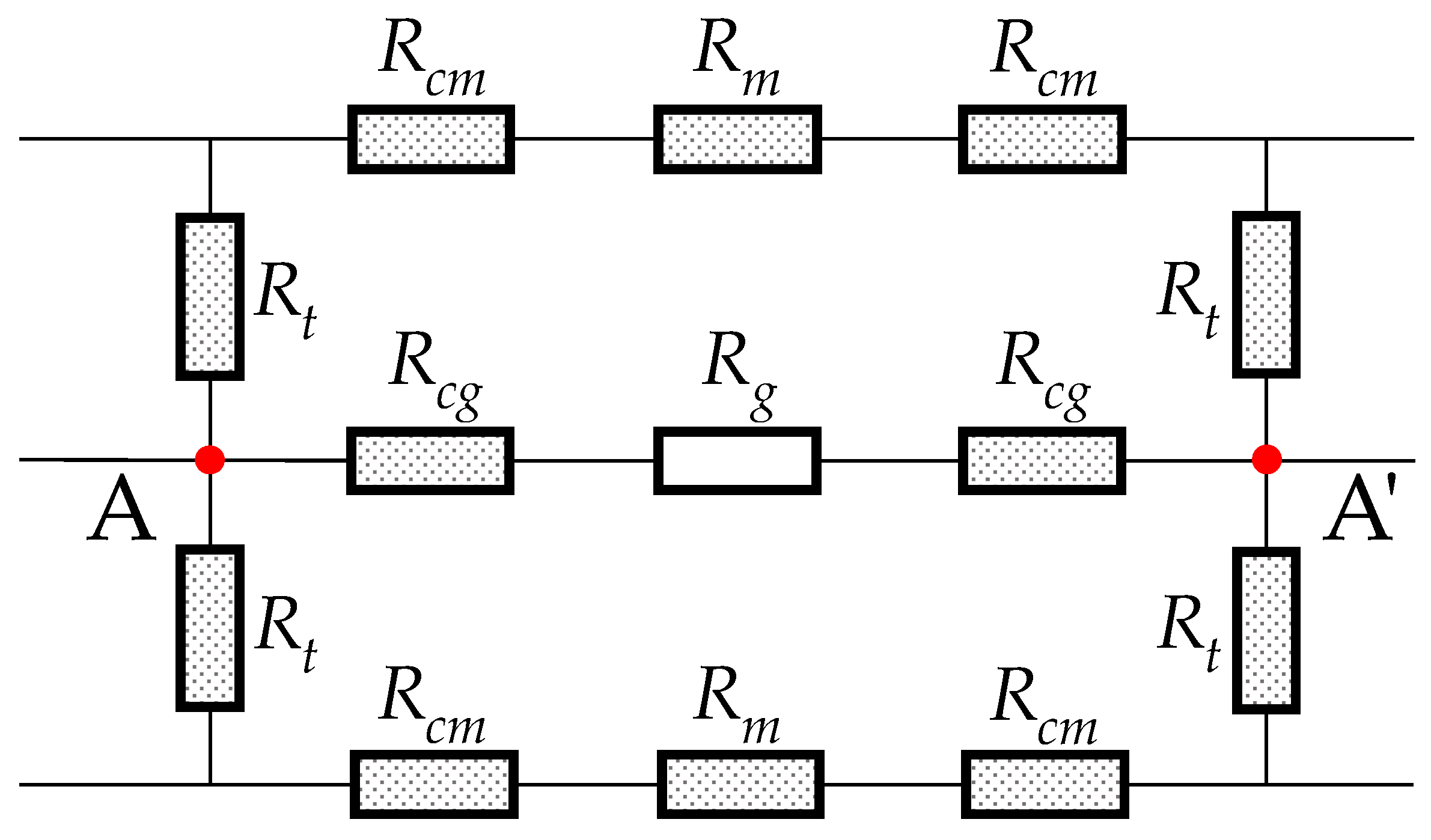
2.1. The Induced Flux
2.2. Magnetic Flux Density in the Air Gap
2.3. Electromagnetic Force Density
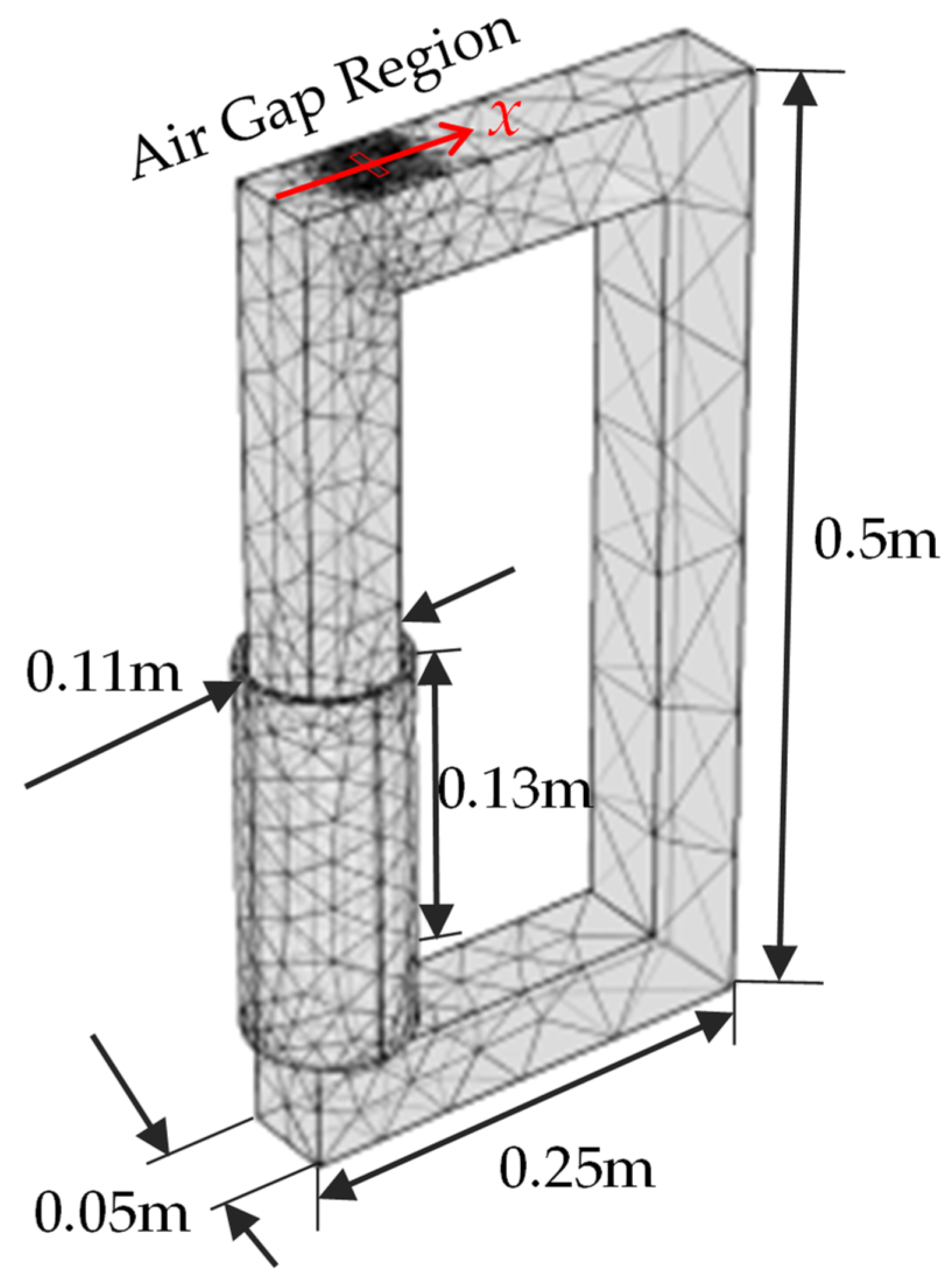
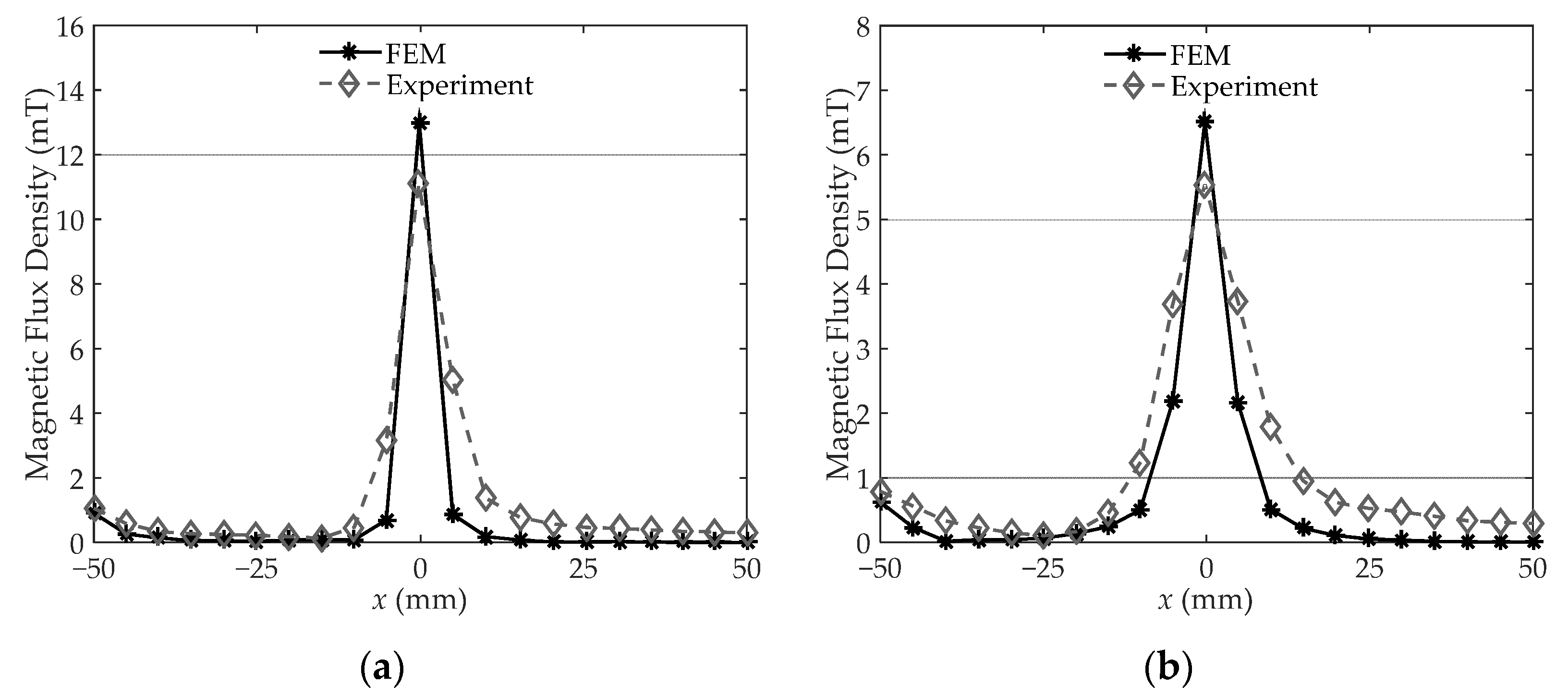
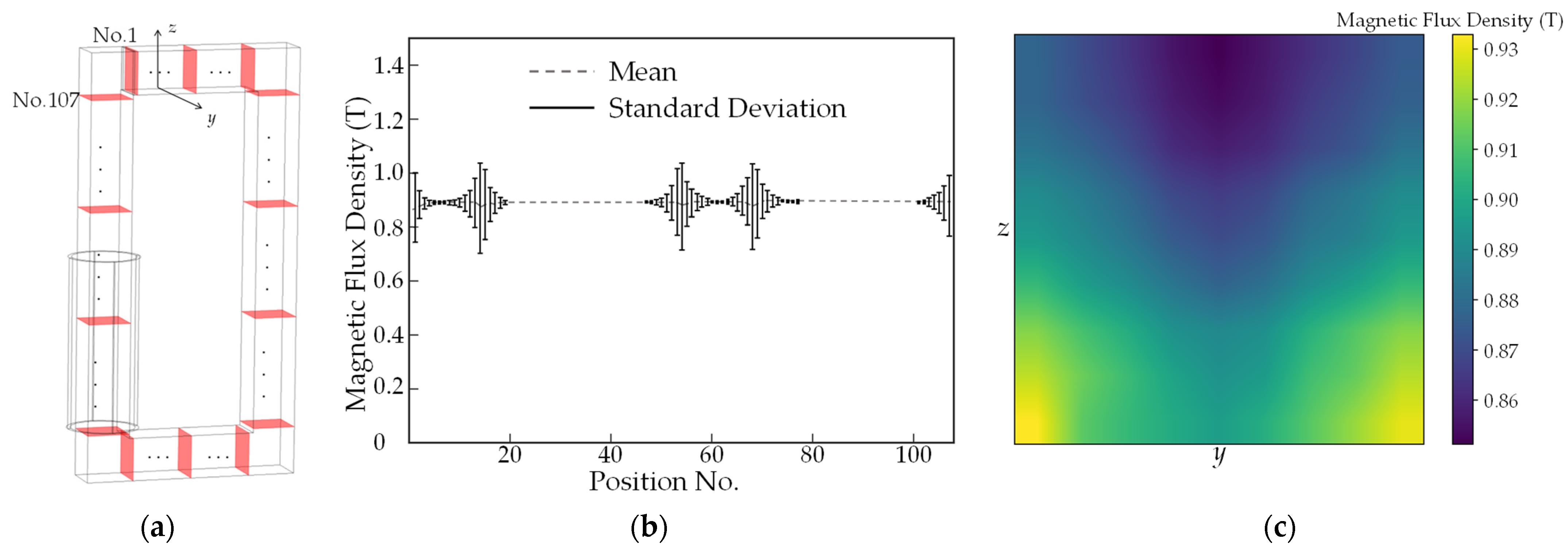
3. Experiment and FEM Simulation
4. Results and Discussion
4.1. Verification of Model Assumptions
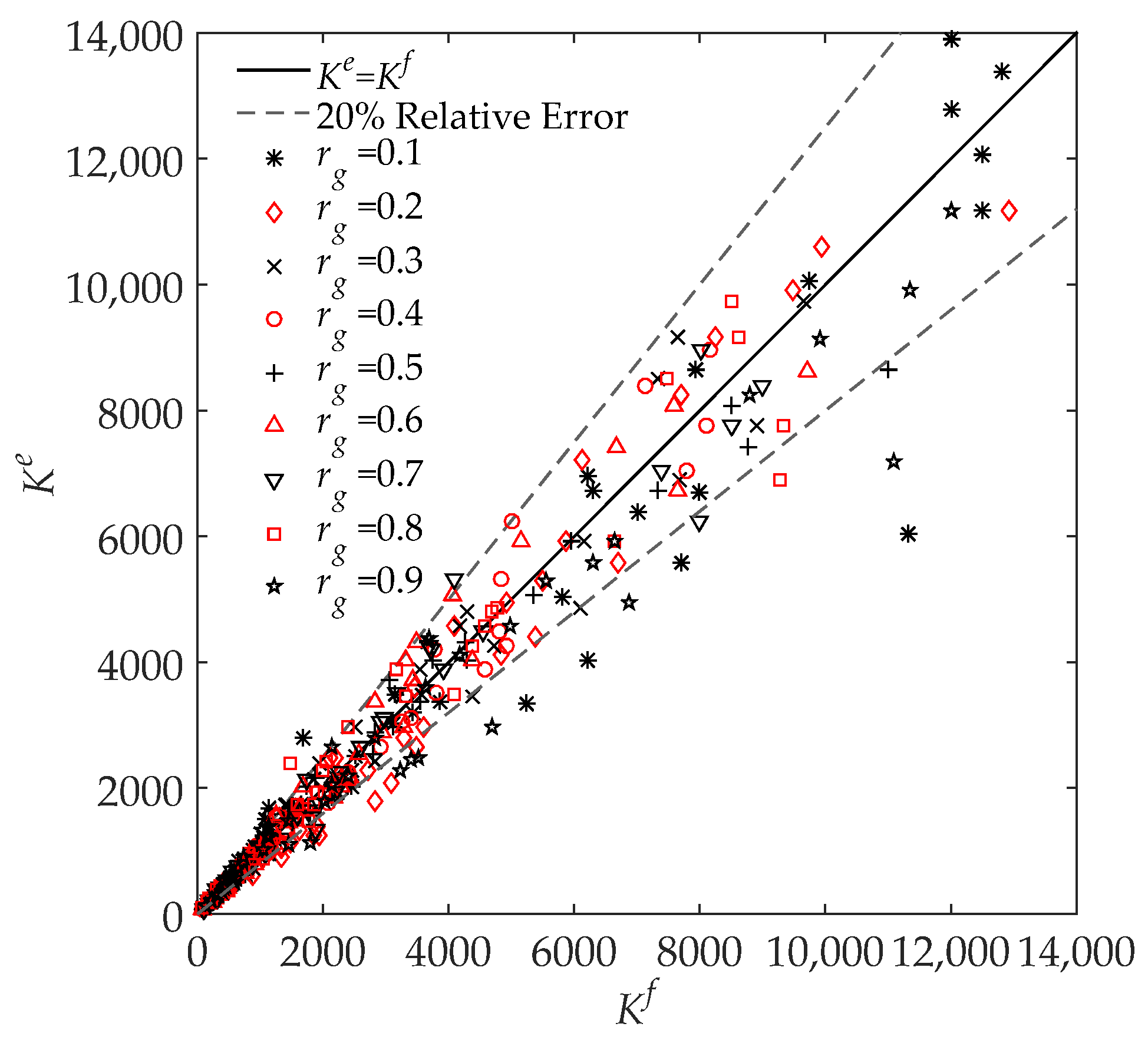
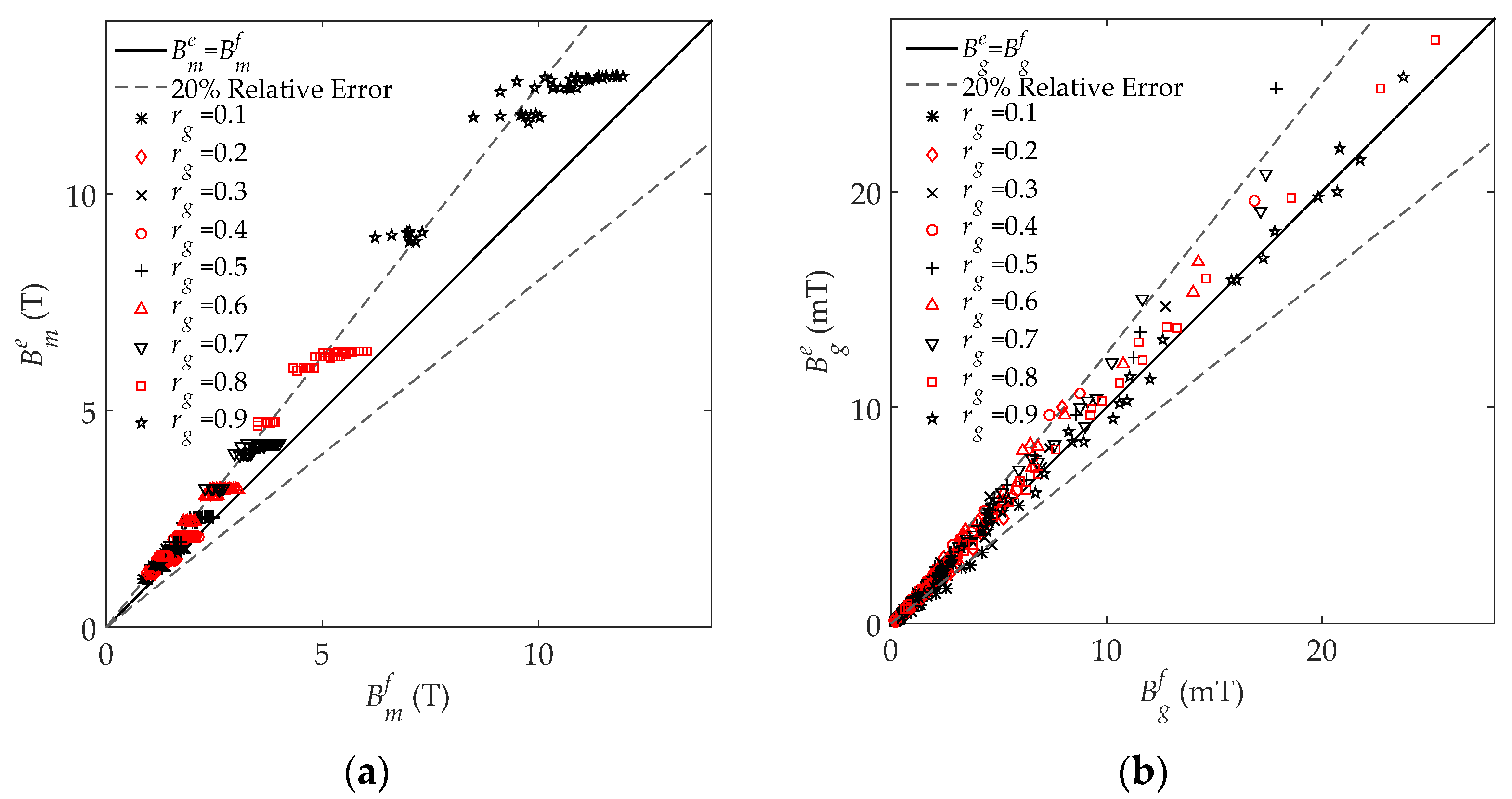
4.2. Comparison between the Engineering Model and FEM Simulation Results
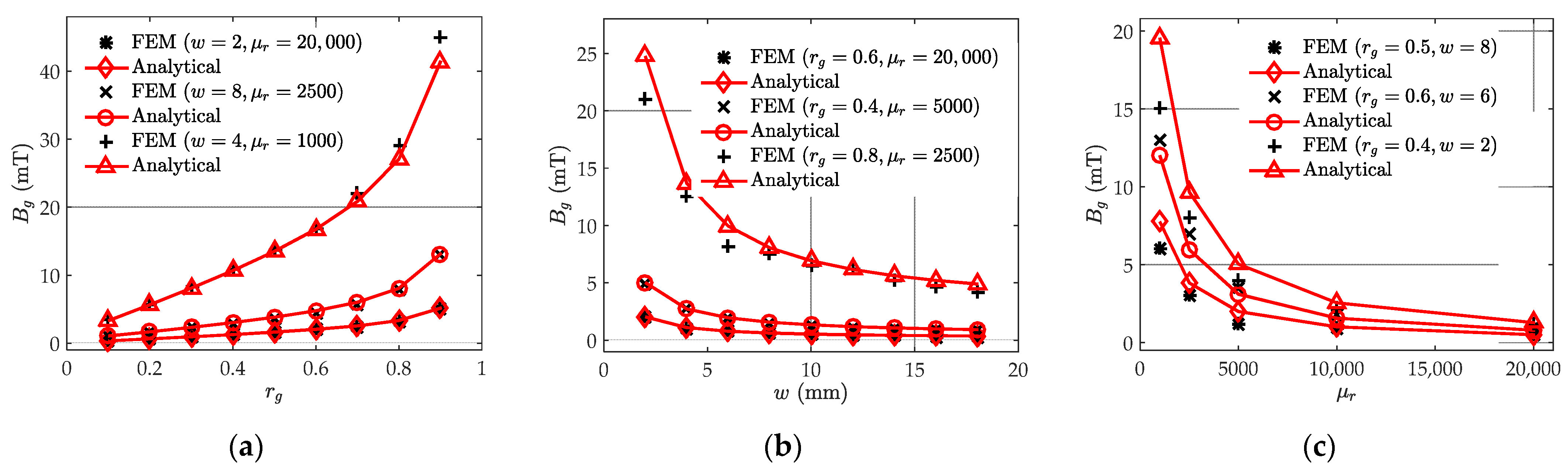
4.3. Effect of the Air Gap on the Magnetic Field
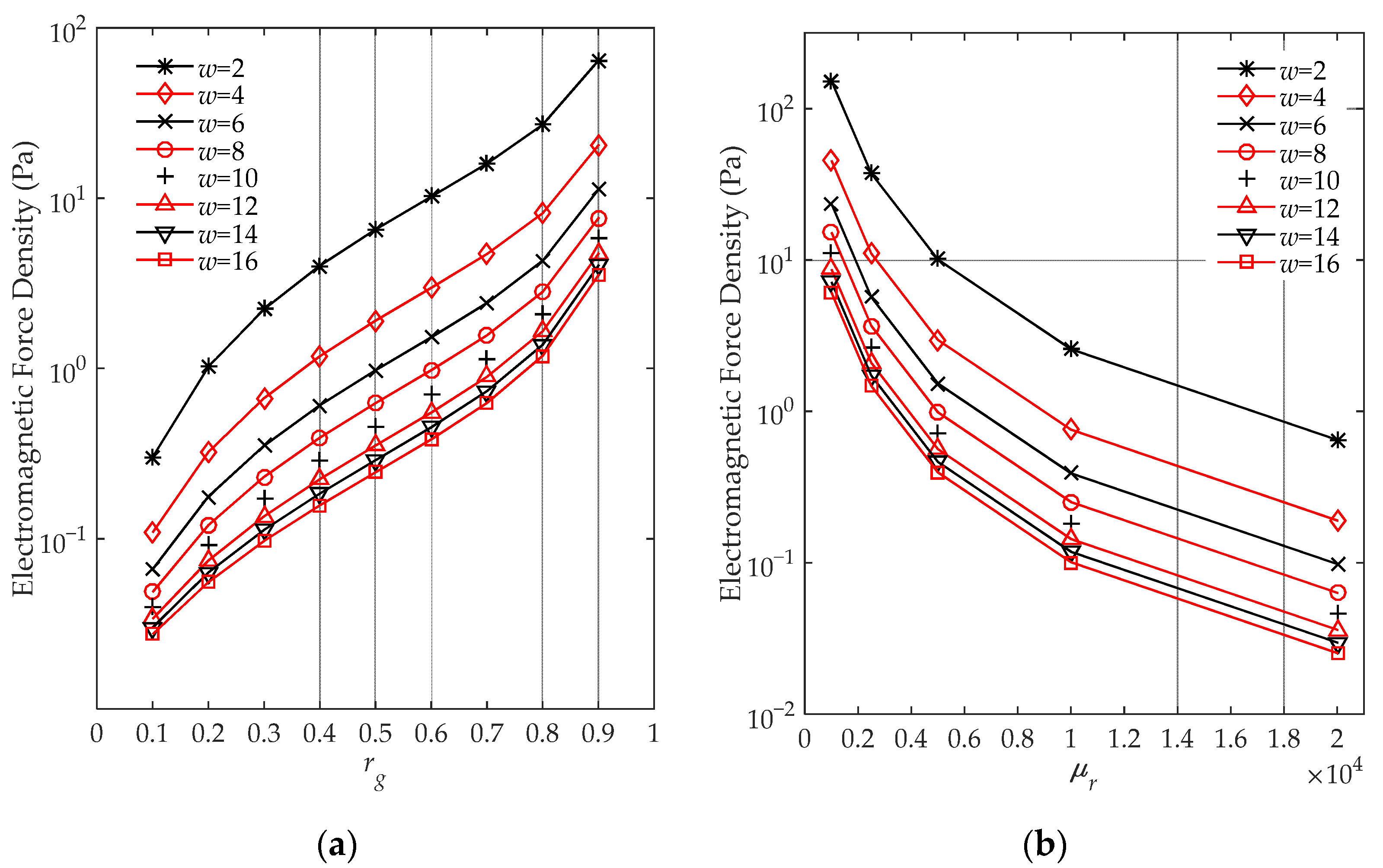
4.4. Effect of the Air Gap on Electromagnetic Force Density
4.5. Discussion about the Assumptions and Applications of the Engineering Model
4.5.1. Discussion about the Assumptions of the Engineering Model
4.5.2. Discussion about Applications of the Engineering Model
- Application 1: The electromagnetic force generated by air gap discontinuities is a significant source of the noise of a laminated core. Therefore, proper design of the air gap geometry and selection of the core material can control the noise produced by electromagnetic force. According to the model established in this research, a smaller air gap ratio, larger gap thickness, and larger core permeability all contribute to a lower leakage magnetic flux and electromagnetic force. This indicates that engineers can reduce core noise by using silicon steel sheets with better magnetic permeability, increasing the gap thickness and larger numbers of step layers at the gap region. However, excessive air gap thickness increases the core loss of the transformers. The design of cores must give consideration to both noise and efficiency, whose balance is the subject of further investigation and application of the developed engineering model.
- Application 2: The vibration on transformer tanks contains abundant information about the internal condition of the transformers. Analysis of the vibration, combined with vibration mechanism modeling, can monitor transformers in operation. The vibration produced by the electromagnetic force in the core discontinuity air gap region contributes a lot to vibration on the transformer tanks. Once the core structure looseness or insulation damage appears inside the transformer, the magnetic and force characteristics of the gap region will change accordingly. The mechanism of this change can be deduced from the proposed model because looseness and insulation damage can affect the gap size and core permeability. Therefore, the developed engineering model can help in monitoring transformer conditions. The mechanism of vibration produced by the electromagnetic force needs further research. Fault characteristics extraction based on the vibration mechanism is also a key step in using the engineering model for transformer monitoring.
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Shilyashki, G.; Pfützner, H.; Palkovits, M.; Windischhofer, A.; Giefing, M. 3D-Printed Detector Band for Magnetic Off-Plane Flux Measurements in Laminated Machine Cores. Sensors 2017, 17, 2953. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Kim, M.; Lee, S. Power Transformer Voltages Classification with Acoustic Signal in Various Noisy Environments. Sensors 2022, 22, 1248. [Google Scholar] [CrossRef]
- Shuai, P.; Biela, J. Influence of Material Properties and Geometric Shape of Magnetic Cores on Acoustic Noise Emission of Medium-Frequency Transformers. IEEE Trans. Power Electron. 2016, 32, 7916–7931. [Google Scholar] [CrossRef]
- Vandevelde, L.; Melkebeek, J. Magnetic forces and magnetostriction in electrical machines and transformer cores. IEEE Trans. Magn. 2003, 39, 1618–1621. [Google Scholar] [CrossRef]
- Rossi, M.; Besnerais, J.L. Vibration Reduction of Inductors under Magnetostrictive and Maxwell Forces Excitation. IEEE Trans. Magn. 2015, 51, 8403406. [Google Scholar] [CrossRef]
- Moses, A.J.; Thomas, B.; Thompson, J.E. Power loss and flux density distributions in the T-joint of a three phase transformer core. IEEE Trans. Magn. 1972, 8, 785–790. [Google Scholar] [CrossRef]
- Jones, M.A.; Moses, A.J.; Thompson, J.E. Flux distribution and power loss in the mitered overlap joint in power transformer cores. IEEE Trans. Magn. 2010, 9, 114–122. [Google Scholar] [CrossRef]
- Moses, A.; Thomas, B. Measurement of rotating flux in silicon iron laminations. IEEE Trans. Magn. 1973, 9, 651–654. [Google Scholar] [CrossRef]
- Moses, A.J. Comparison of transformer loss prediction from computed and measured flux density distribution. IEEE Trans. Magn. 1998, 34, 1186–1188. [Google Scholar] [CrossRef]
- Shahrouzi, H.; Moses, A.J.; Anderson, P.I.; Li, G.; Hu, Z. Comparison between measured and computed magnetic flux density distribution of simulated transformer core joints assembled from grain-oriented and non-oriented electrical steel. AIP Adv. 2018, 8, 047607. [Google Scholar] [CrossRef]
- Qi, T.; Guo, S.; Wang, Z. Magnetic flux distribution in power transformer core with mitred joints. J. Appl. Phys. 2015, 117, 17. [Google Scholar] [CrossRef]
- Moses, A.J.; Anderson, P.I.; Phophongviwat, T.; Tabrizi, S. Contribution of magnetostriction to transformer noise. In Proceedings of the Universities Power Engineering Conference, Cardiff, UK, 21 August–3 September 2010; pp. 1–5. [Google Scholar]
- Shilyashki, G.; Helmut, P.; Peter, H.; Martin, A.; Anton, K.; Ivo, M. Spatial distributions of magnetostriction, displacements and noise generation of model transformer cores. Int. J. Mech. Sci. 2016, 118, 188–194. [Google Scholar] [CrossRef]
- Weiser, B.; Pfutzner, H.; Anger, J. Relevance of magnetostriction and forces for the generation of audible noise of transformer cores. IEEE Trans. Magn. 2000, 36, 3759–3777. [Google Scholar] [CrossRef]
- Pfutzner, H.; Bengtsson, C.; Booth, T.; Loffler, F.; Gramm, K. Three dimensional flux distributions in transformer cores as a function of package design. IEEE Trans. Magn. 1994, 30, 2713–2727. [Google Scholar] [CrossRef]
- Terorde, G.; Schneider, J.; Hameyer, K. Investigations of the audible noise of inductors with respect to different ferromagnetic materials. Compel 1999, 18, 647–655. [Google Scholar] [CrossRef]
- Guillod, T.; Krismer, F.; Kolar, J.W. Magnetic equivalent circuit of mf transformers: Modeling and parameter uncertainties. Electr. Eng. 2018, 100, 2261–2275. [Google Scholar] [CrossRef]
- Serigne, M.; Nicolas, B.; Vincent, L. An Anisotropic Model for Magnetostriction and Magnetization Computing for Noise Generation in Electric Devices. Sensors 2016, 16, 553. [Google Scholar] [CrossRef] [Green Version]
- Kunicki, M.; Wotzka, D. A Classification Method for Select Defects in Power Transformers Based on the Acoustic Signals. Sensors 2019, 19, 5212. [Google Scholar] [CrossRef] [Green Version]
- Nakata, T. Numerical analysis of flux and loss distributions in electrical machinery. IEEE Trans. Magn. 1984, 20, 1750–1755. [Google Scholar] [CrossRef]
- Basak, A.; Higgs, C. Flux distribution in three phase transformer cores with various t-joint geometries. IEEE Trans. Magn. 1982, 18, 670–673. [Google Scholar] [CrossRef]
- Witulski, A.F. Introduction to modeling of transformers and coupled inductors. IEEE Trans. Power Electron. 1995, 10, 349–357. [Google Scholar] [CrossRef]
- Elleuch, M.; Poloujadoff, M. New transformer model including joint air gaps and lamination anisotropy. IEEE Trans. Magn. 1998, 34, 3701–3711. [Google Scholar] [CrossRef]
- Li, L.; Du, X.; Pan, J.; Adrian, K.; David, M.; Huang, H.; Zheng, J. Distributed magnetic flux density on the cross-section of a transformer core. Electronics 2019, 8, 297. [Google Scholar] [CrossRef] [Green Version]
- Benedict, R.P. Fundamentals of Pipe Flow; Wiley: New York, NY, USA, 1980. [Google Scholar]
- Pfutzner, H.; Mulasalihovic, E.; Yamaguchi, H.; Sabic, D.; Shilyashki, G.; Hofbauer, F. Rotational magnetization in transformer coresa review. IEEE Trans. Magn. 2011, 47, 4523–4533. [Google Scholar] [CrossRef]
- Loffler, F.; Pfutzner, H.; Booth, T.; Bengtsson, C.; Gramm, K. Influence of air gaps in stacked transformer cores consisting of several packages. IEEE Trans. Magn. 1994, 30, 913–915. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Variable | Range of Variable | Parameters | Case 1 | Case 2 | Case 3 |
|---|---|---|---|---|---|
| 0.1 to 0.9 | 2 | 8 | 4 | ||
| 20,000 | 2500 | 1000 | |||
| 2 to 18 | 0.6 | 0.4 | 0.8 | ||
| 20,000 | 5000 | 2500 | |||
| 1000, 2500, 5000, 10,000, 20,000 | 0.5 | 0.6 | 0.4 | ||
| 8 | 6 | 2 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, L.; Du, X.; Pan, J.; Jiang, X. An Engineering Model of Magnetic Flux Density and Electromagnetic Force Density at the Structural Discontinuity within Transformer Cores. Sensors 2022, 22, 4869. https://doi.org/10.3390/s22134869
Li L, Du X, Pan J, Jiang X. An Engineering Model of Magnetic Flux Density and Electromagnetic Force Density at the Structural Discontinuity within Transformer Cores. Sensors. 2022; 22(13):4869. https://doi.org/10.3390/s22134869
Chicago/Turabian StyleLi, Lingzhi, Xuhao Du, Jie Pan, and Xishan Jiang. 2022. "An Engineering Model of Magnetic Flux Density and Electromagnetic Force Density at the Structural Discontinuity within Transformer Cores" Sensors 22, no. 13: 4869. https://doi.org/10.3390/s22134869
APA StyleLi, L., Du, X., Pan, J., & Jiang, X. (2022). An Engineering Model of Magnetic Flux Density and Electromagnetic Force Density at the Structural Discontinuity within Transformer Cores. Sensors, 22(13), 4869. https://doi.org/10.3390/s22134869