
Unmanned Surface Vehicle Collision Avoidance Path Planning in Restricted Waters Using Multi-Objective Optimisation Complying with COLREGs


Abstract
:1. Introduction
- (1)
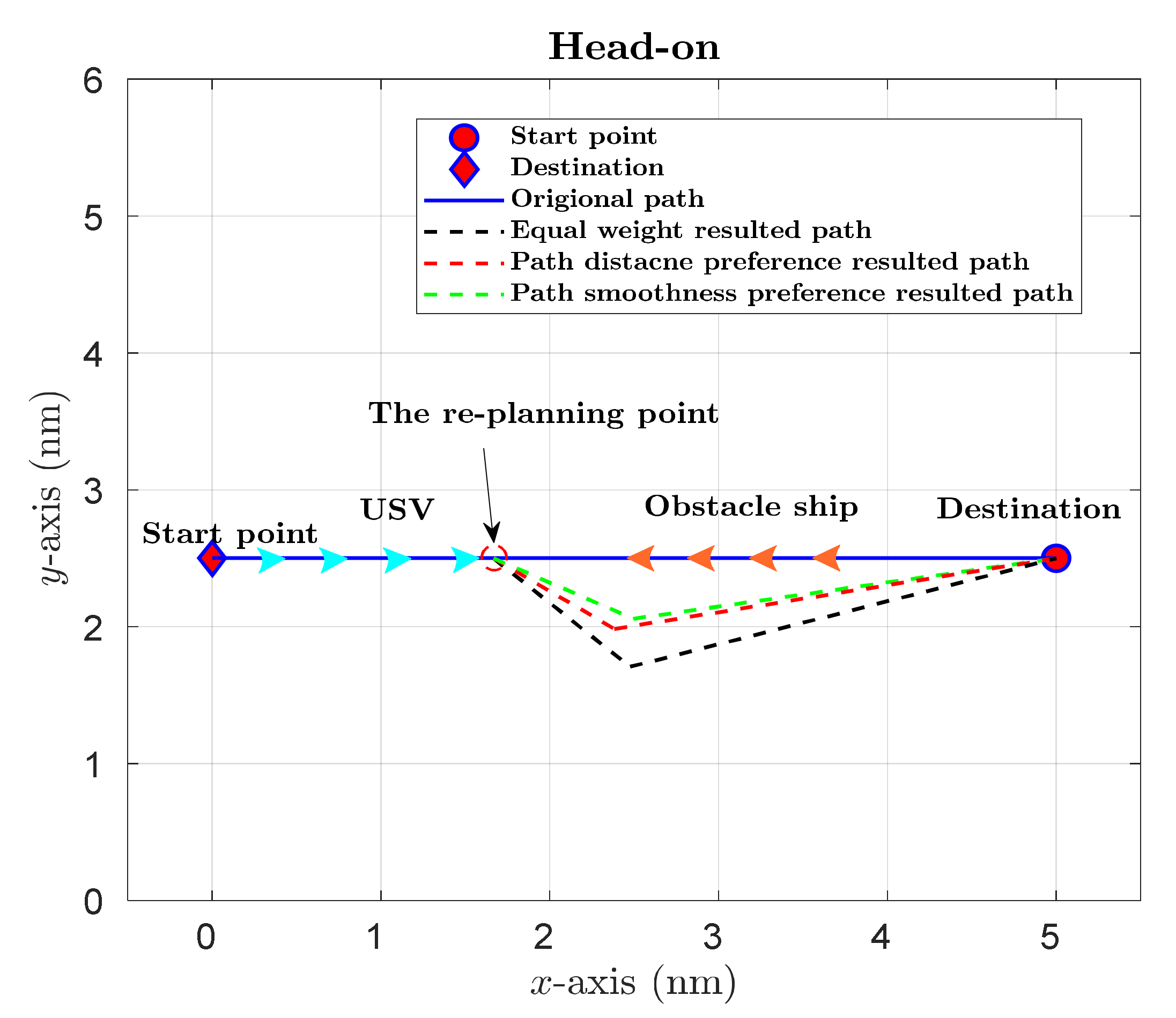
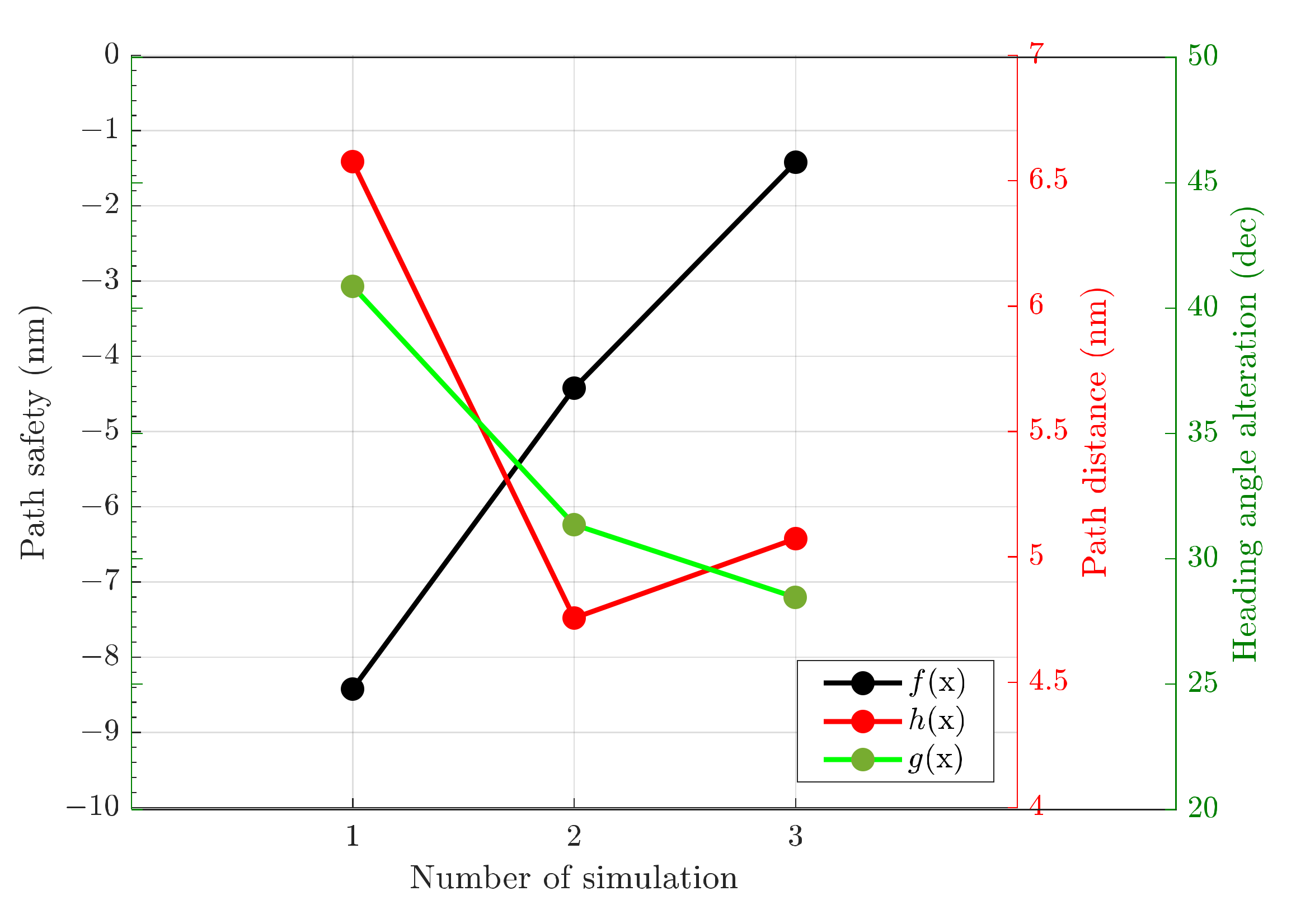
- A novel weighted sum multi-objective optimisation framework is established for USV collision avoidance path planning, and the coefficients could be reconfigured for different path preferences.
- (2)
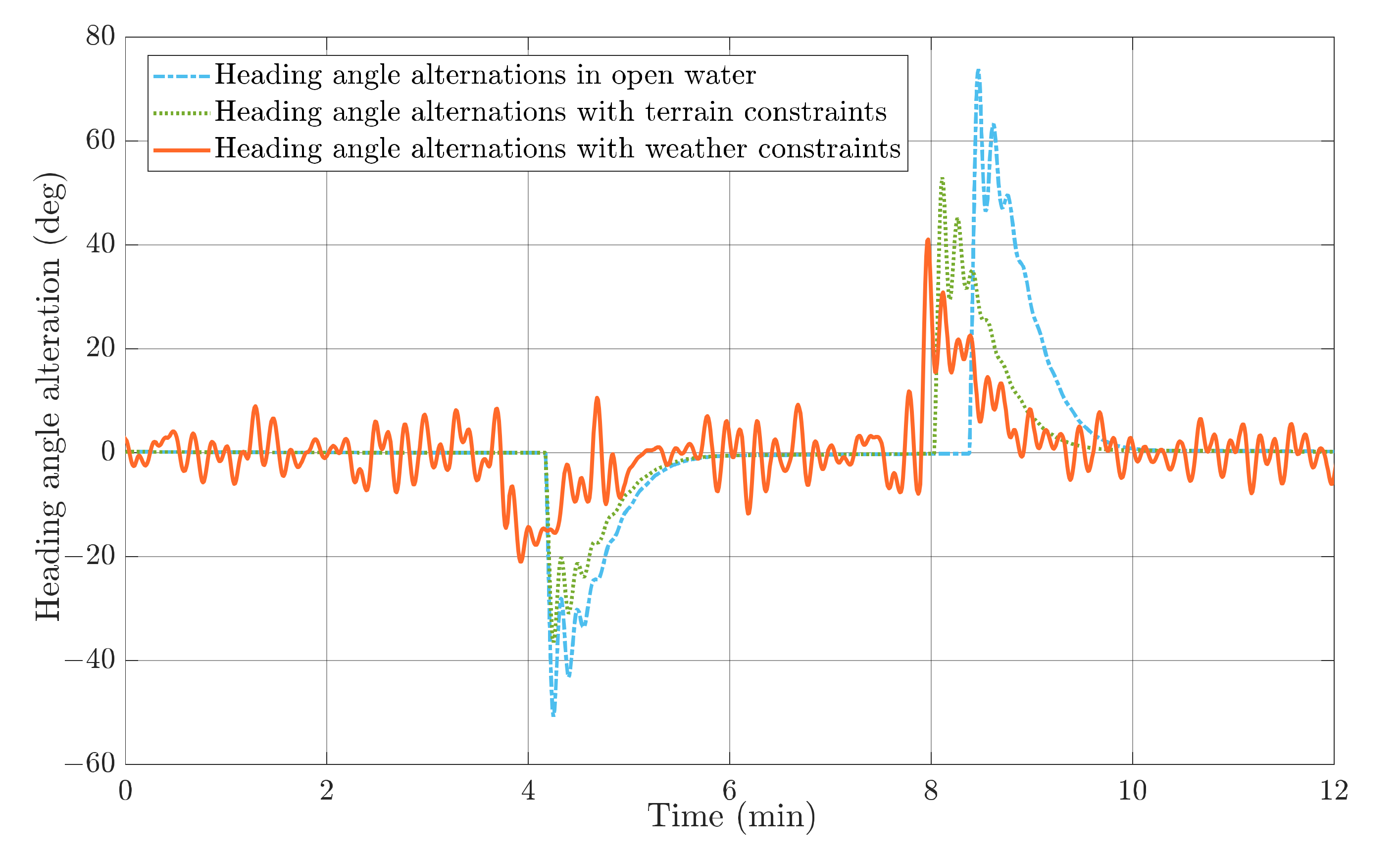
- In addition to conventional COLREGs constraints, the terrain and weather constraints are also considered in USV collision avoidance path planning, which might result in different replanned paths compared with open water areas with calm sea states.
- (3)
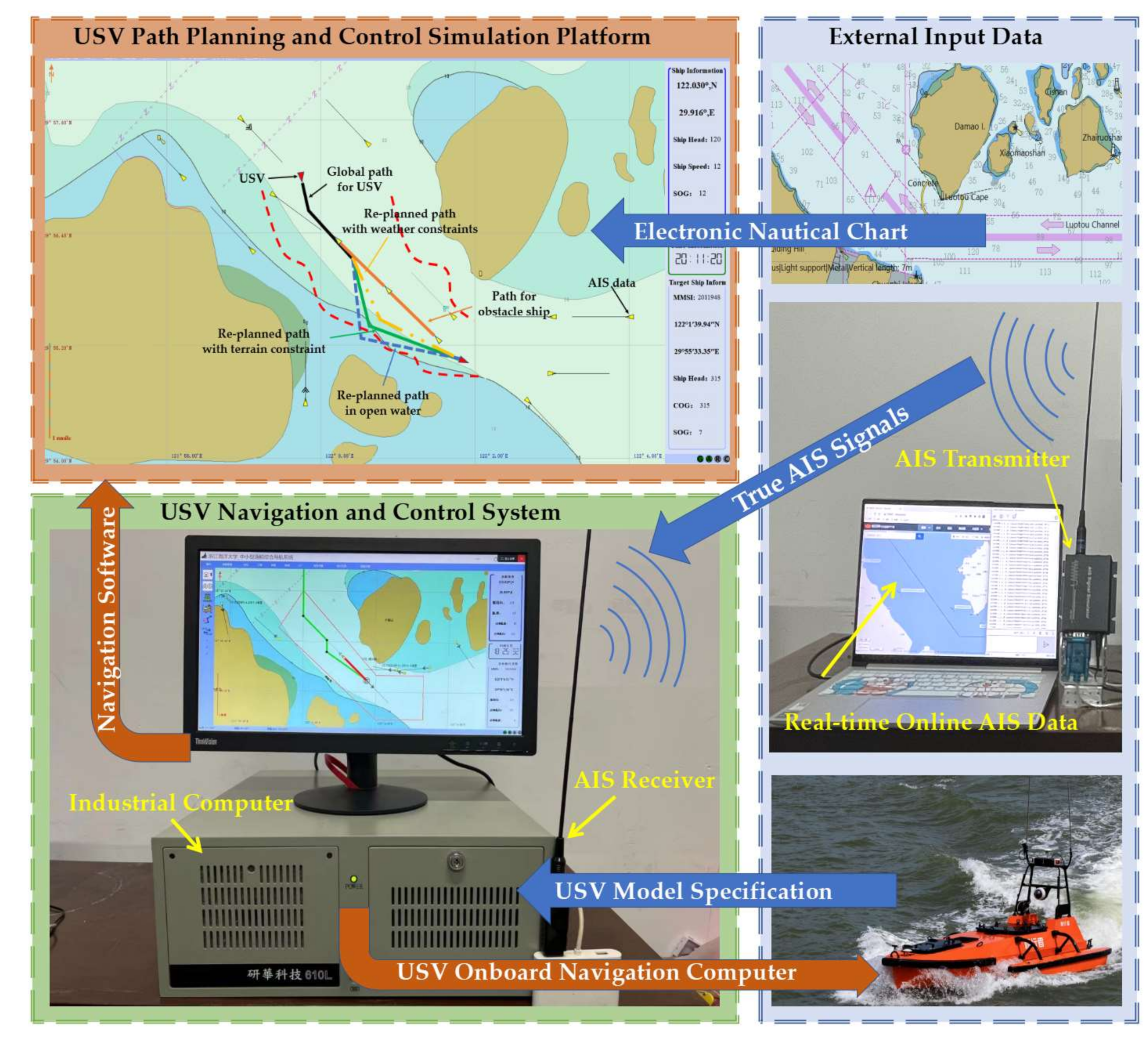
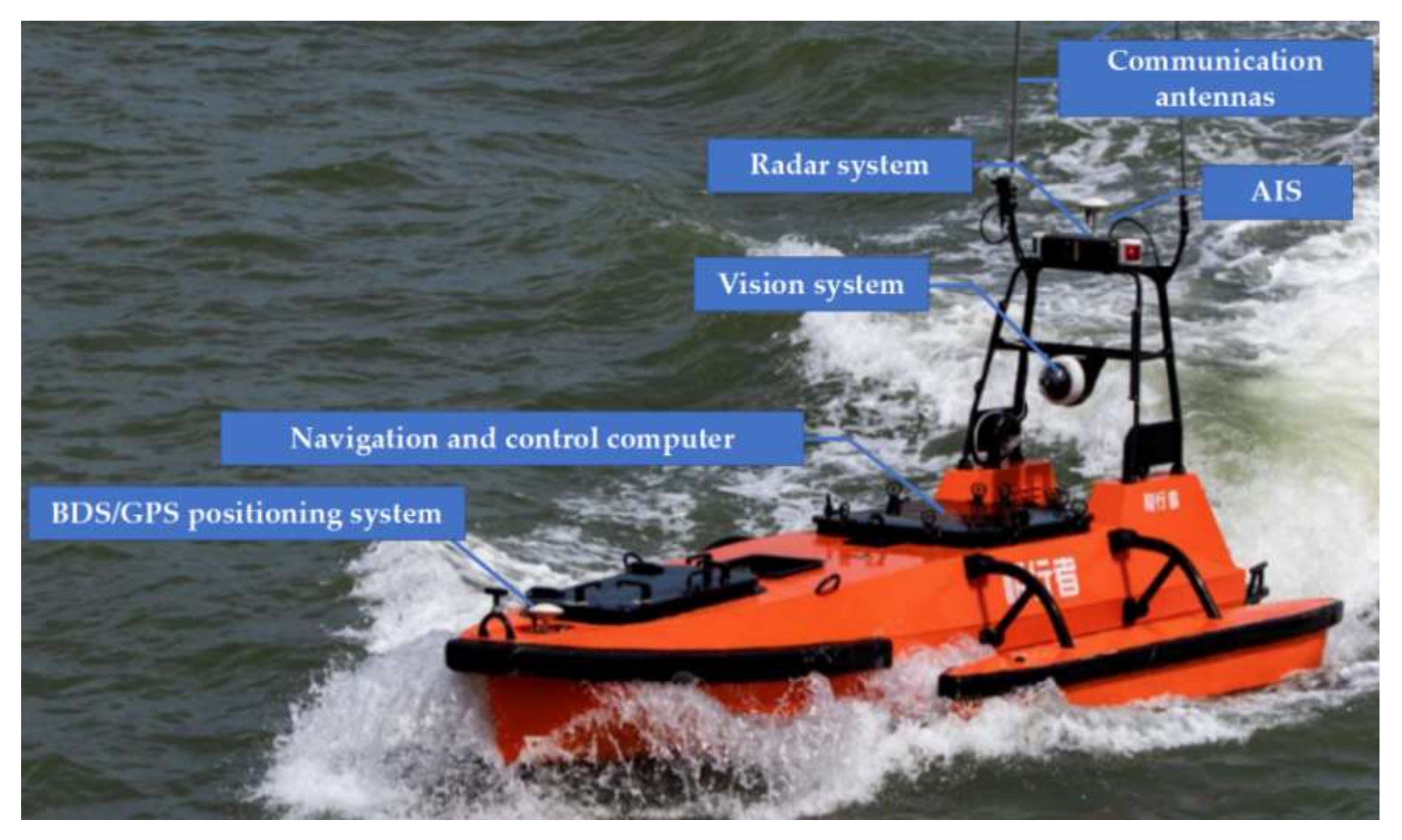
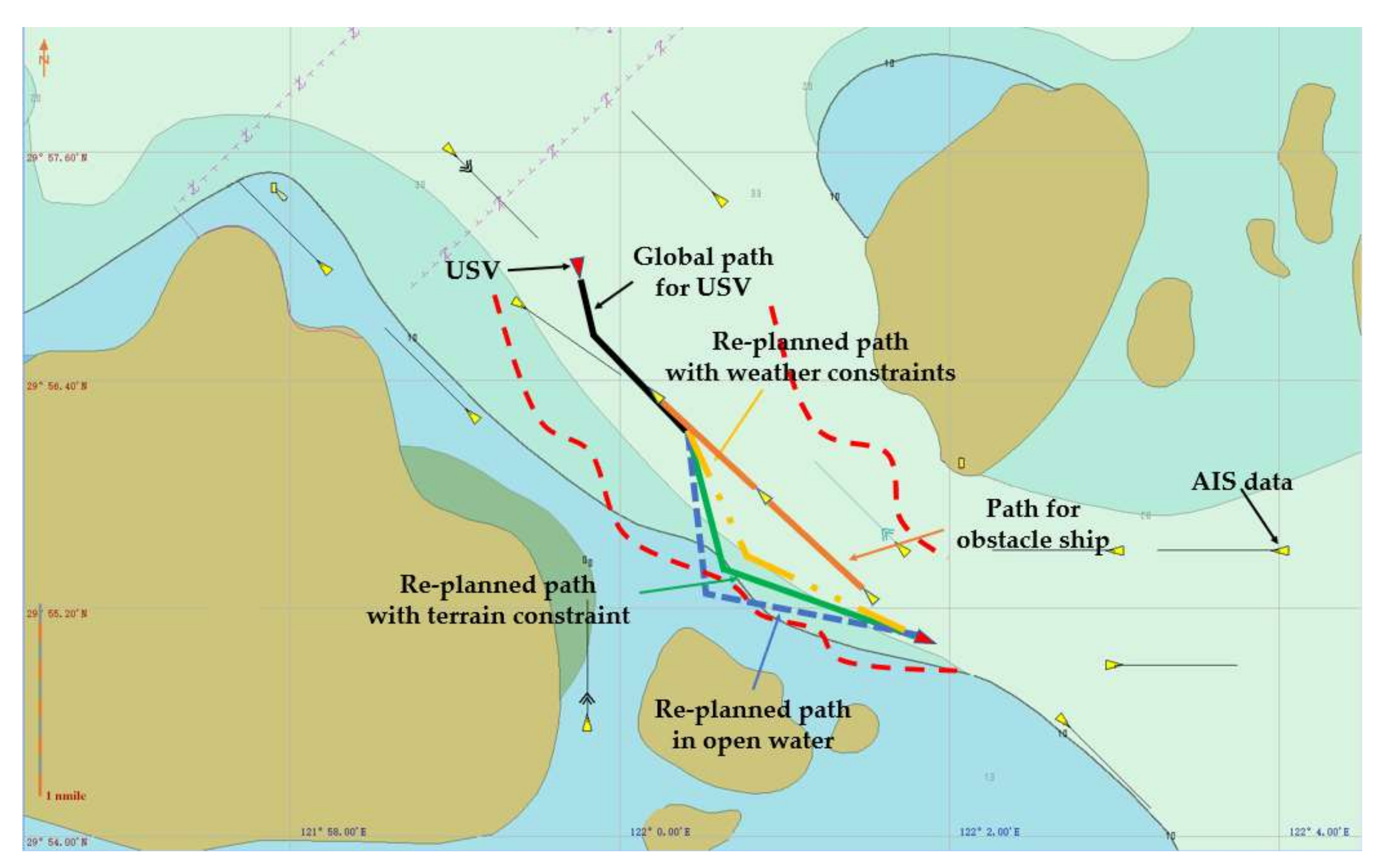
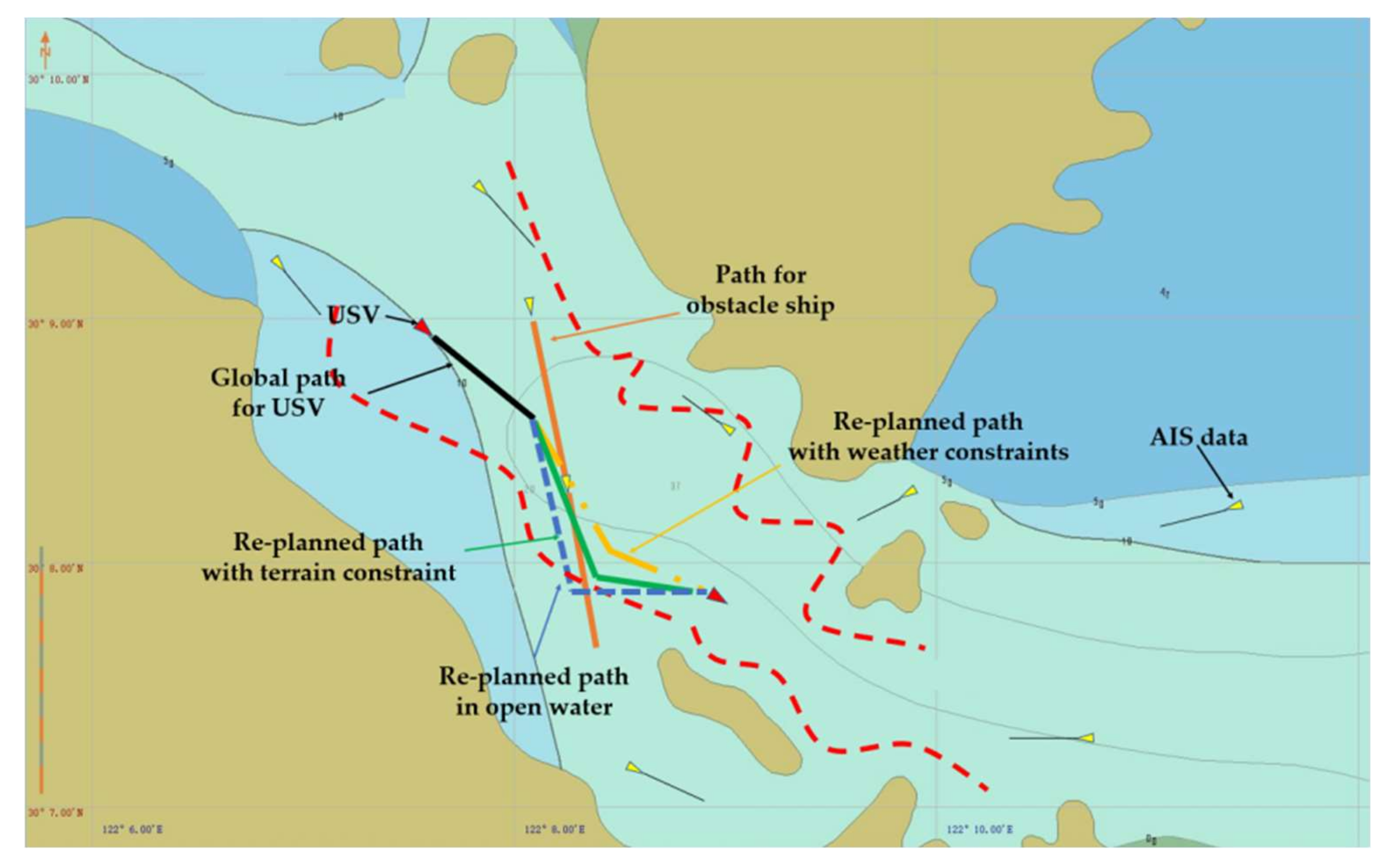
- Besides numerical simulations, a novel hardware-in-the-loop USV navigation system is established using an industrial computing platform, and HIL tests in restricted waters with actual Automatic Identification System (AIS) signals and an electronic nautical chart (ENC) are conducted.
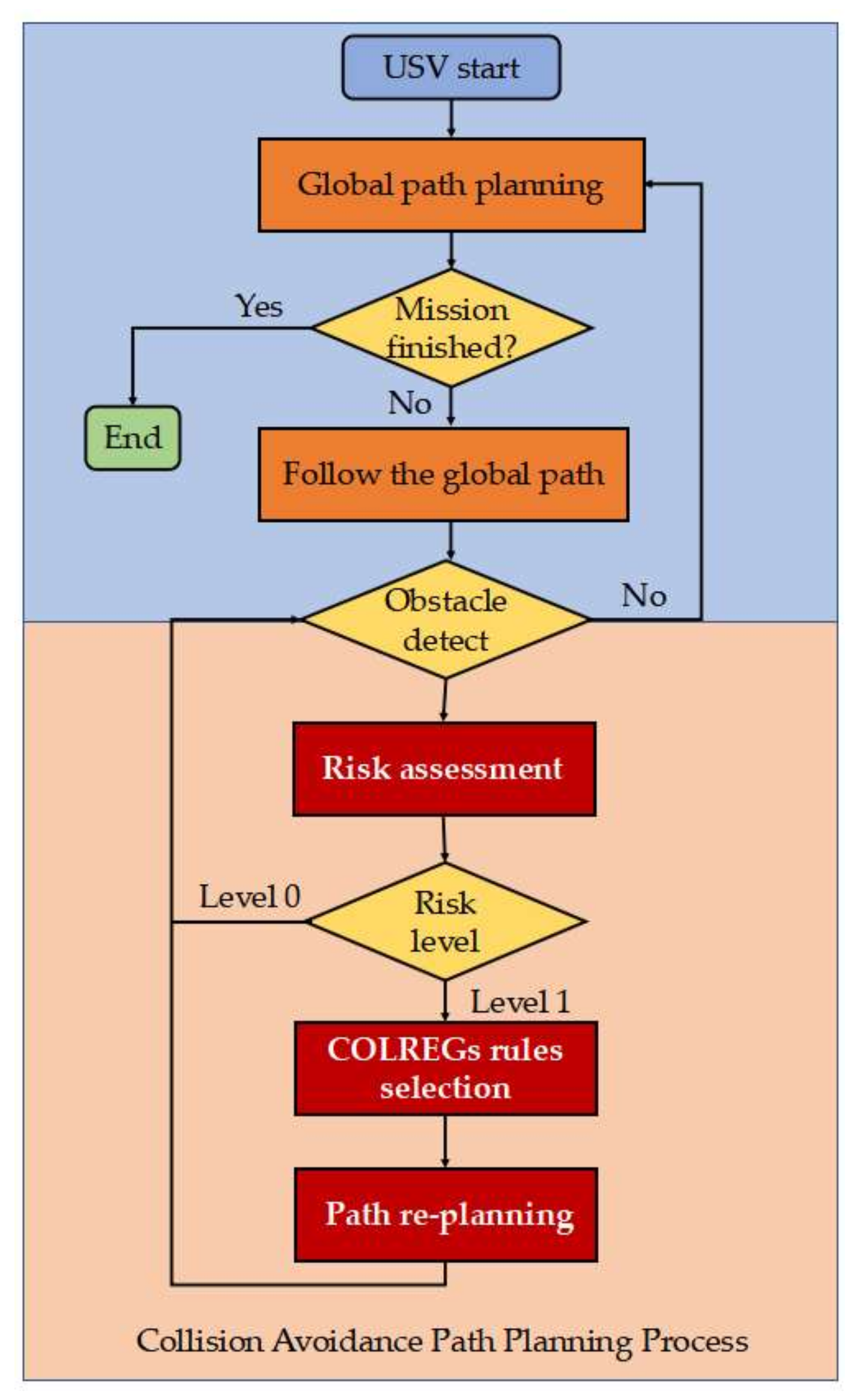
2. USV Collision Avoidance Path Planning Framework
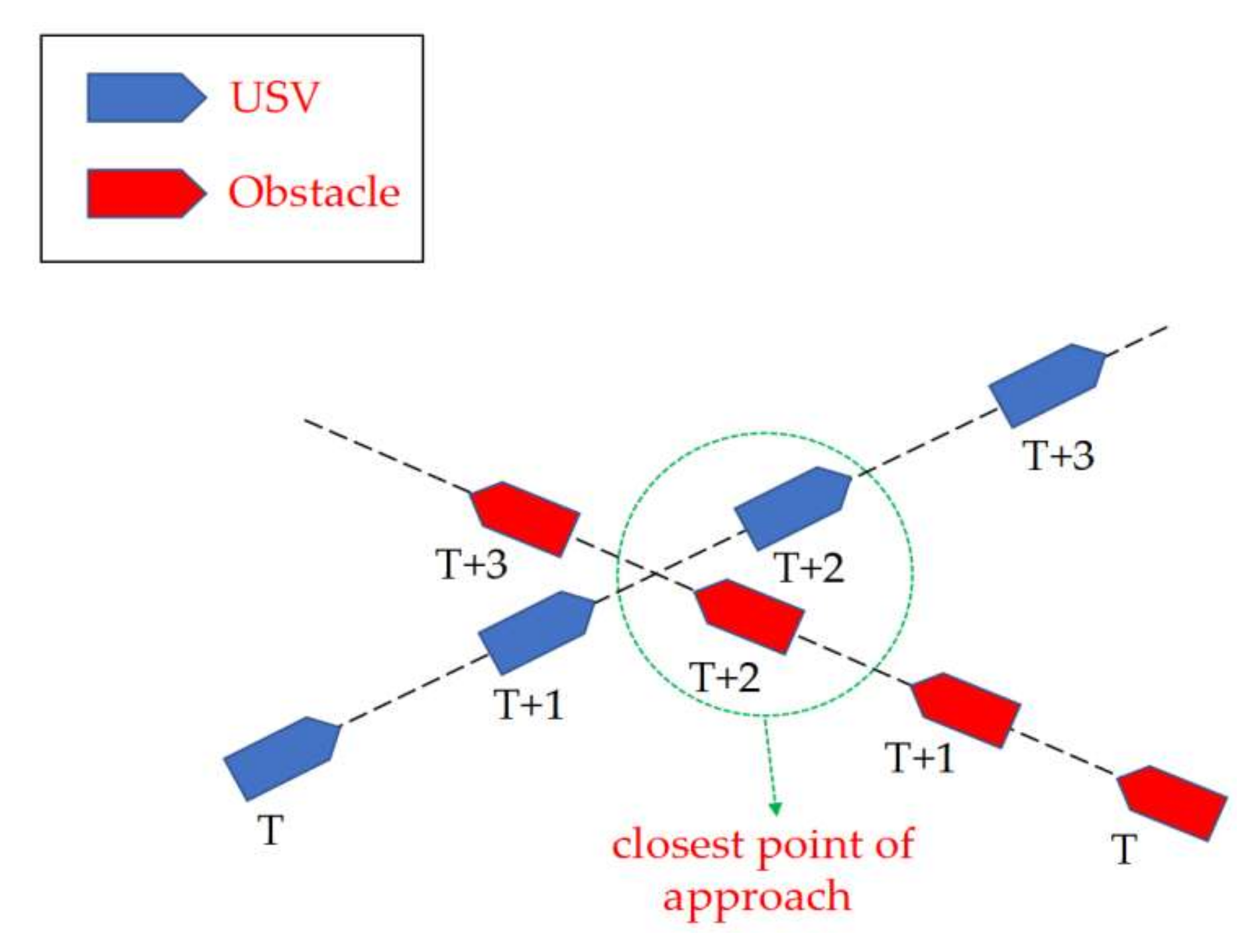
2.1. Risk Assessment
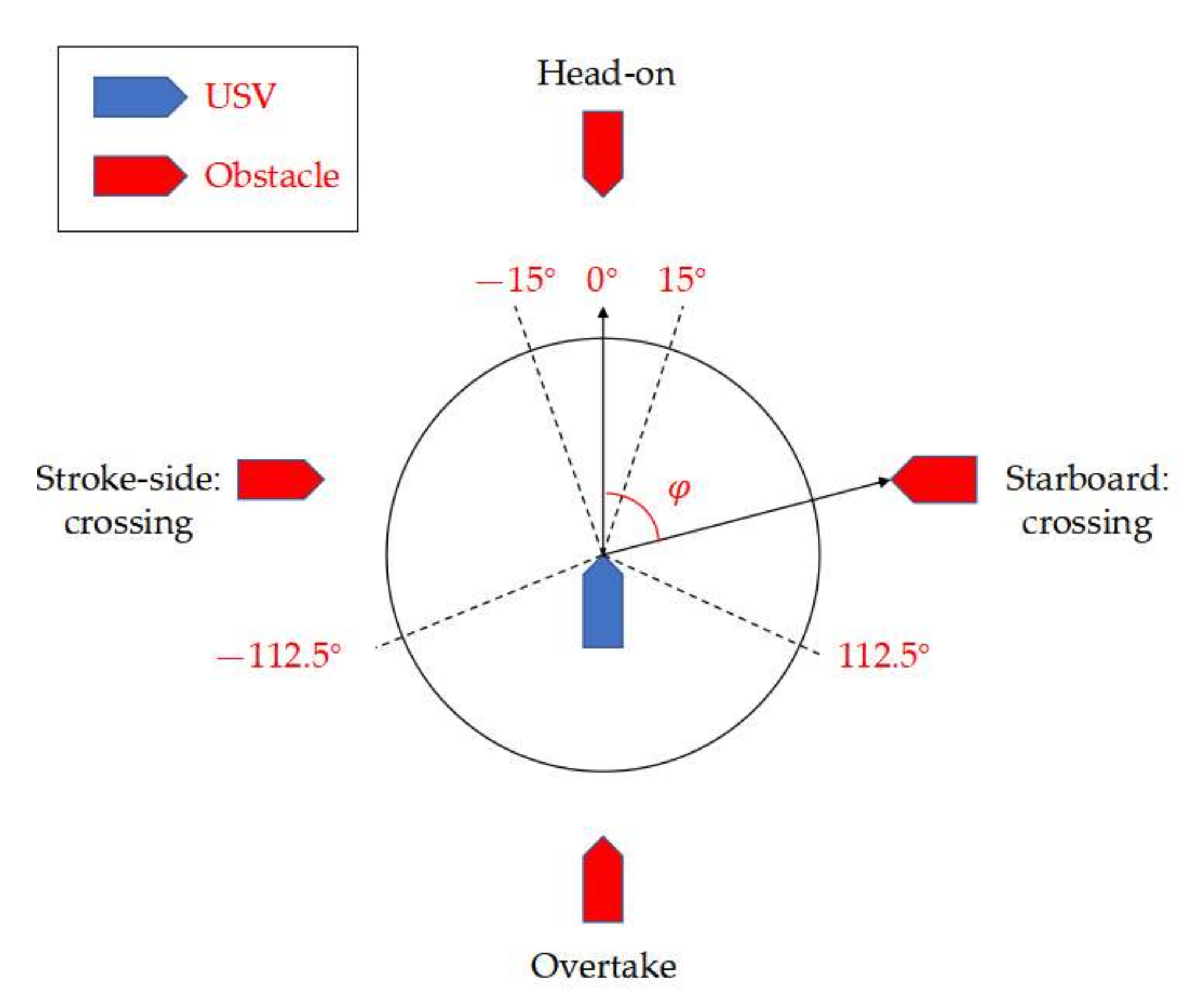
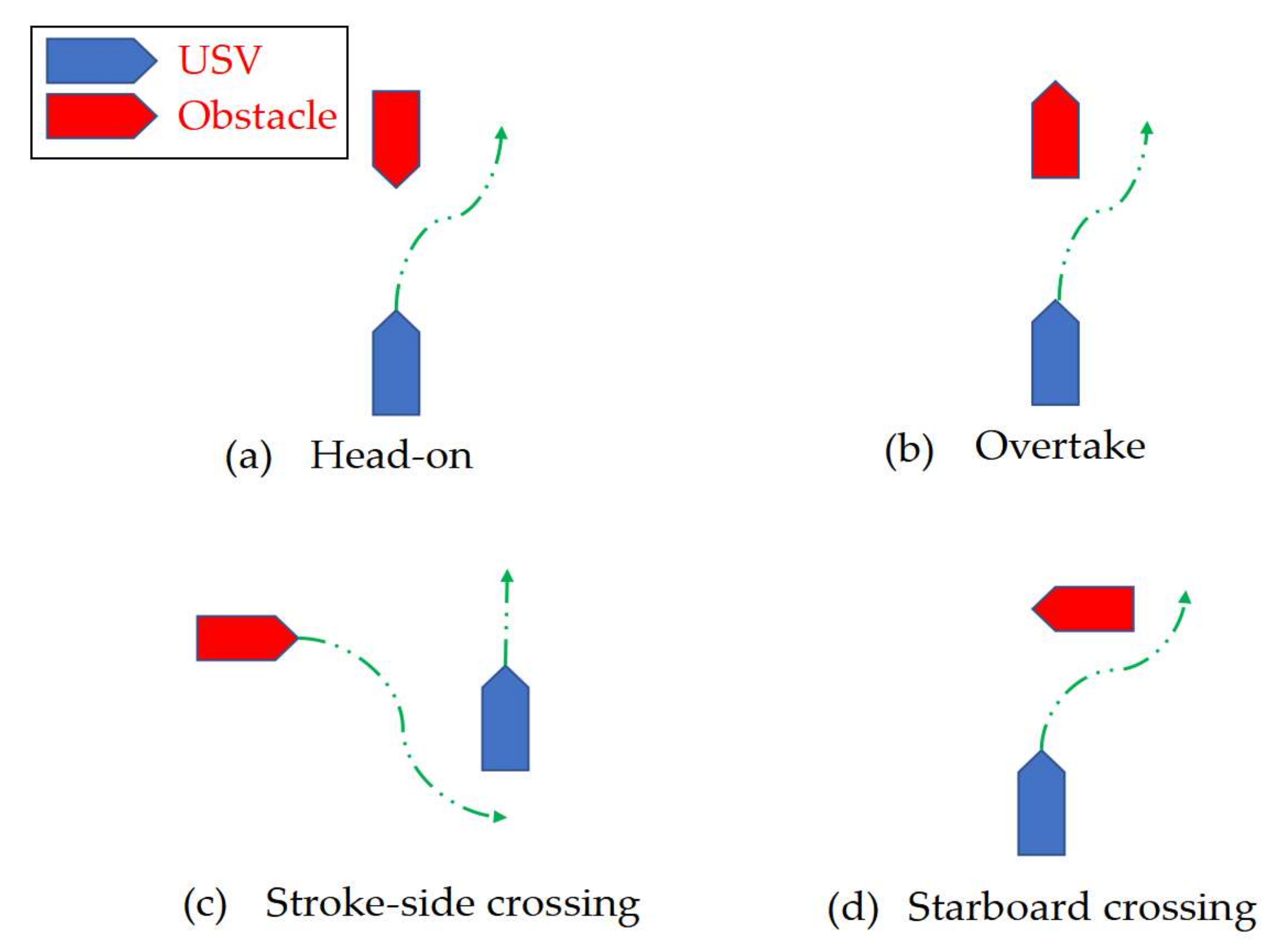
2.2. COLREGs Rule Selection
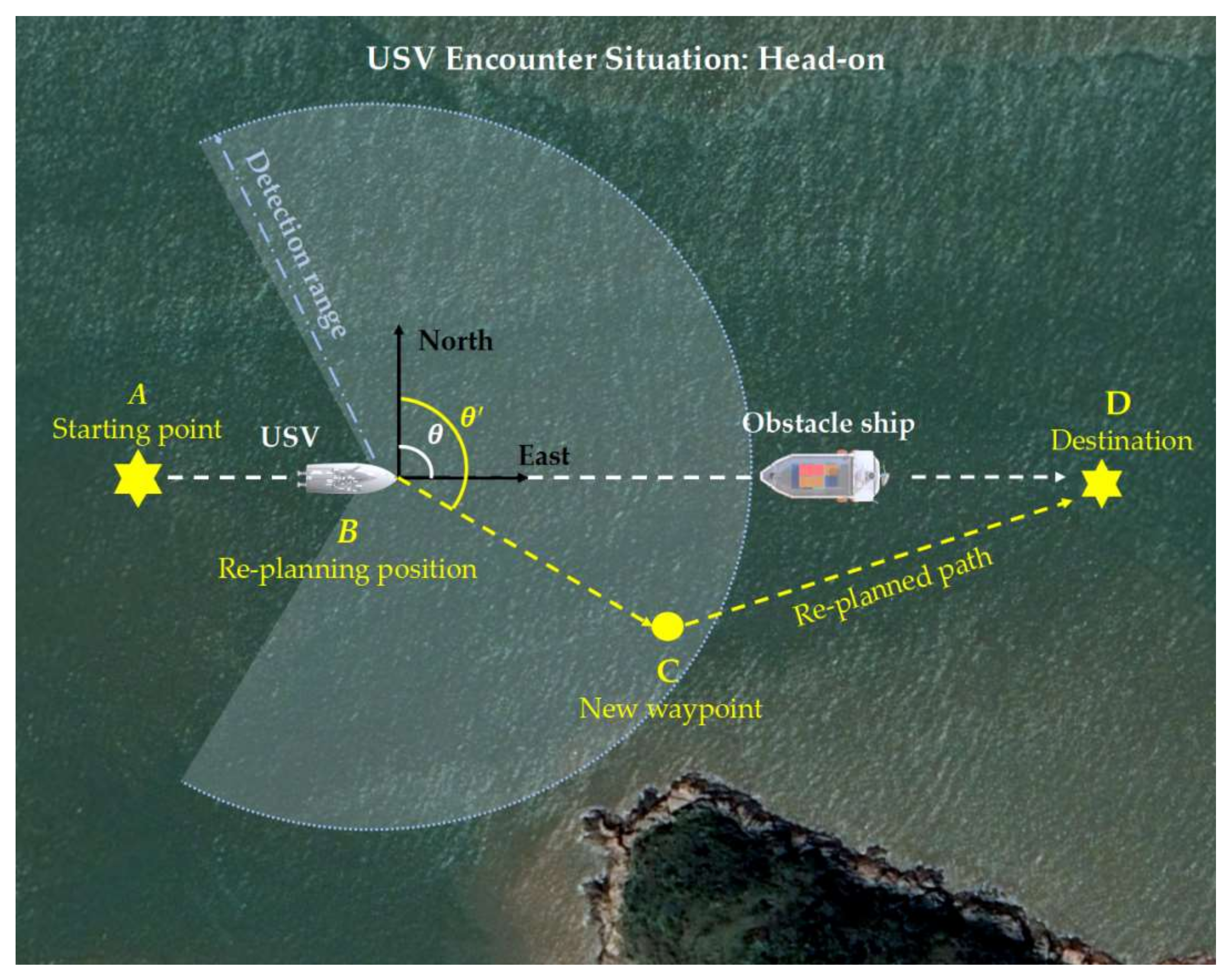
2.3. Path Replanning
3. Weighted Sum Multi-Objective Optimisation
3.1. Decision Variables
3.2. Constraints
- 1.
- Safety constraint. Since the highest priority is safety, the first constraint is to eliminate any collision risk, which means represent a risk level of 0.
- 2.
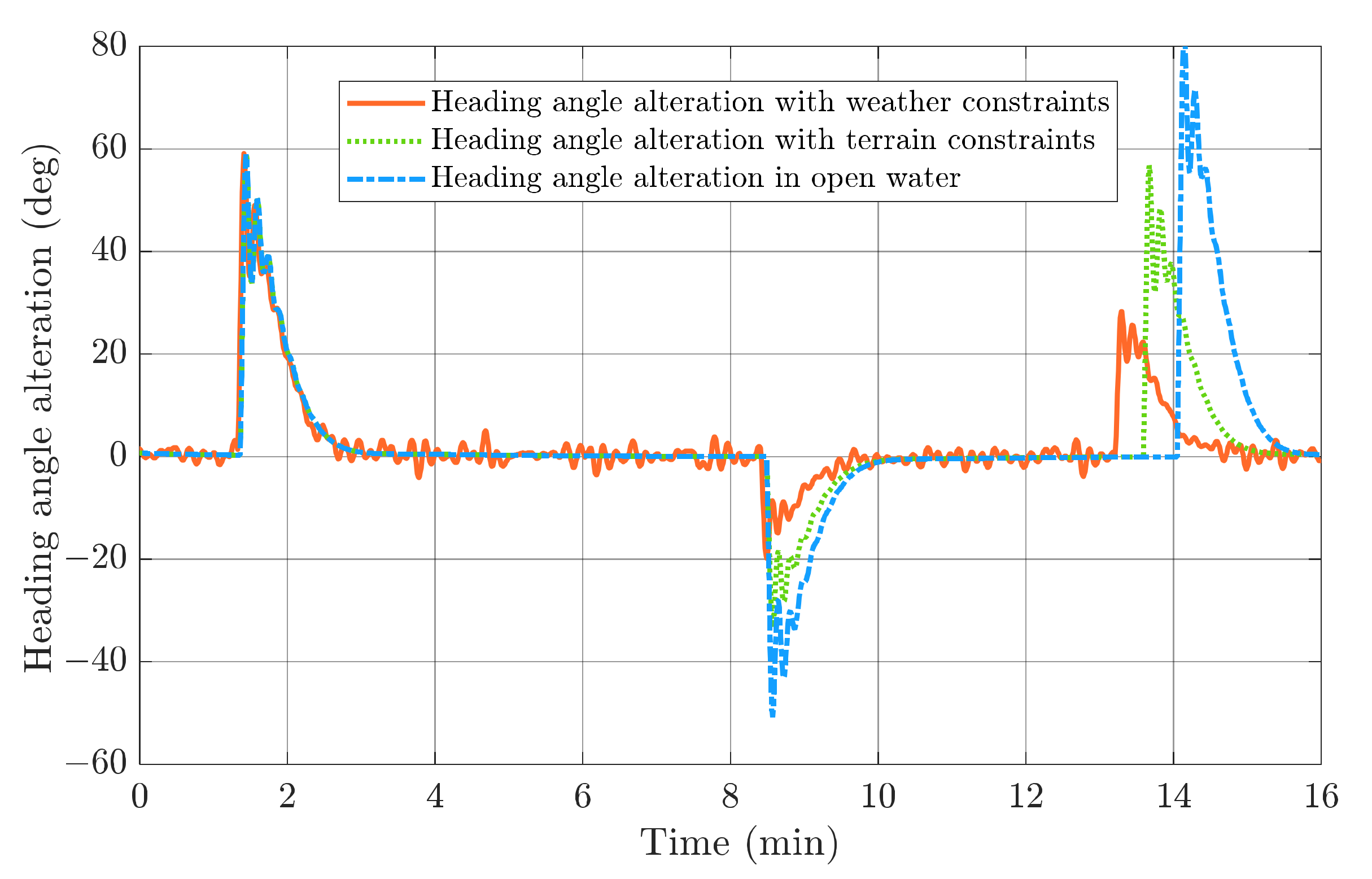
- Heading angle constraint. According to the COLREGs, a heading angle alteration bigger than is large enough to be observed by other ships. It is generally inefficient that the heading angle alteration is bigger than . Therefore, it is assumed that the optimised heading angle variation is between 15, i.e.,
- 3.
- Time constraint. Once a new path is initiated, the USV continues at least the minimum duration of time to the new waypoint, making the USV’s decision obvious and predictable to other ships. Additionally, the USV should not continue indefinitely on the new path. This is specified by the variable t, defining the maximum allowable time constraint,where is the minimum allowable time and is the maximum allowable time. Additionally, terrain and weather constraints are also included, as USVs are prone to conduct collision avoidance actions in restricted waters with terrain constraints, and USVs should avoid large heading angle variations in rough sea conditions.
- 4.
- Weather constraint. All the above constraints are considered in mild weather conditions, and certain constraints should be further restricted in rough sea states. For instance, large heading alterations in high sea states are prone to synchronised rolls phenomena, which may pose higher safety risks for USVs [20,21]. Therefore, under high sea states, USV should avoid large heading alterations in the collision avoidance process, and the maximum allowable time could be removed, e.g.,where is the maximum allowable heading angle alteration under different sea states.
- 5.
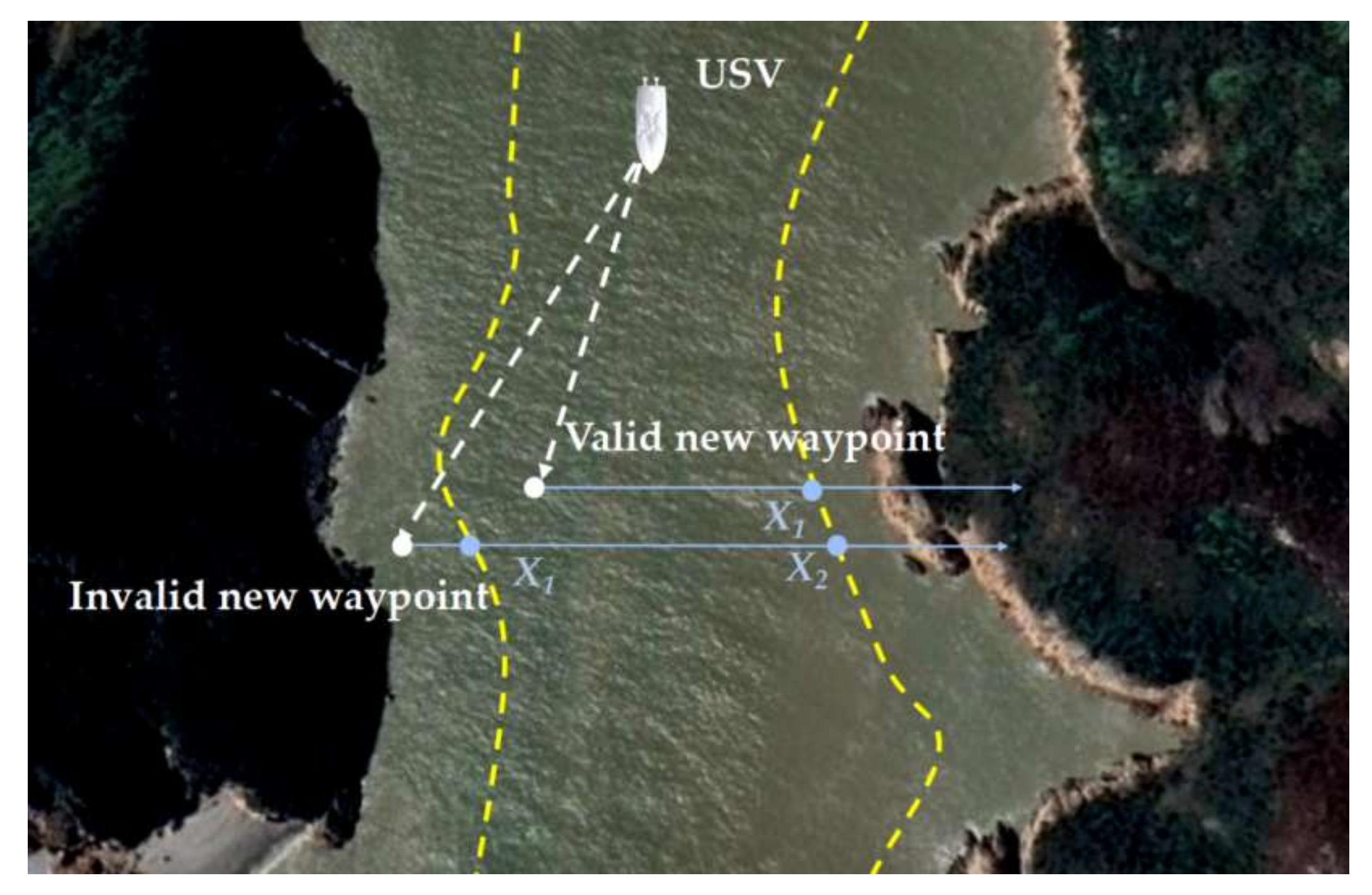
- Terrain constraint. Grounding accidents in restricted water areas are the biggest threat to marine navigation safety, which is usually caused by the misinterpretation of the water depth. Additionally, the submerged reef around the coast causes a potential risk during navigation. The terrain constraint could be mainly divided into the following four cases: (1) an area with shallow water depth or irregular water depth variation, (2) long continuous reef veins in their vicinity, (3) the narrow area between reefs and islands without accurate measurements and (4) the isolated reefs and the point beach around shallower beaches. Therefore, the designed USV collision avoidance new waypoint should be within the terrain-permitted region. Mathematically, this could be judged using the ray casting algorithm [22], as shown in Figure 6, where Xk denotes the intersection points between a ray starting from the planned new waypoint and the water area border with an acceptable water depth. If the waypoint is inside of the region, the ray will intersect the border an odd number of times, which meanswhere n = 0, 1, 2, …. Then, the constraint could be implemented by simply counting the crossing number.
3.3. Objective Functions
- 1.
- Safety. The safety objective is the first and foremost one, as it is the primary concern for all marine ships. In other words, this objective is to eliminate all collision risks. Mathematically, this safety objective function could be written as follows [26]:Here, a is a constant scaling parameter, and represents the deviation between x-induced DCPA and minimum collision-free DCPA, which means that there will be no risk of collision only when 0. The smaller is, the safer the replanned USV path is.
- 2.
- Smoothness. The abrupt change of the heading angle will lead to a potential risk for ships, so the replanned path should be as smooth as possible. The objective is to minimise the sum of angle changes from replanning position B to the destination D, which is equal to the sum of the angles ∠B and ∠D. Therefore, ∠B + ∠D is used to quantify the path smoothness, and it could be derived from basic trigonometry.where is the shortest distance from the replanning point to the destination, and is the USV speed.
- 3.
- Distance. The replanned path should be as short as possible to reduce energy consumption. This objective function will minimise the deviation between the changed path and the original path.where is the distance from the new waypoint C to destination D.
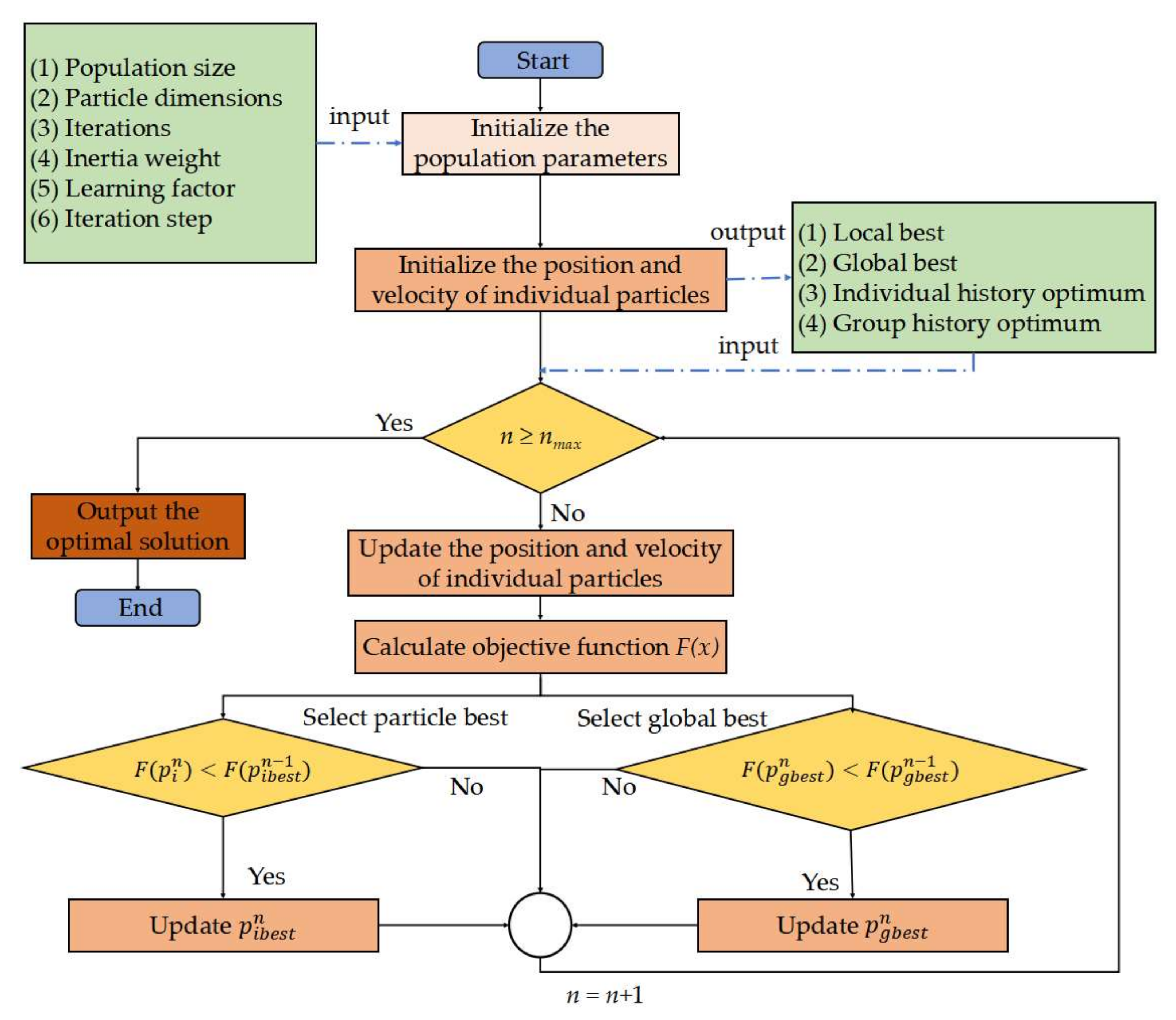
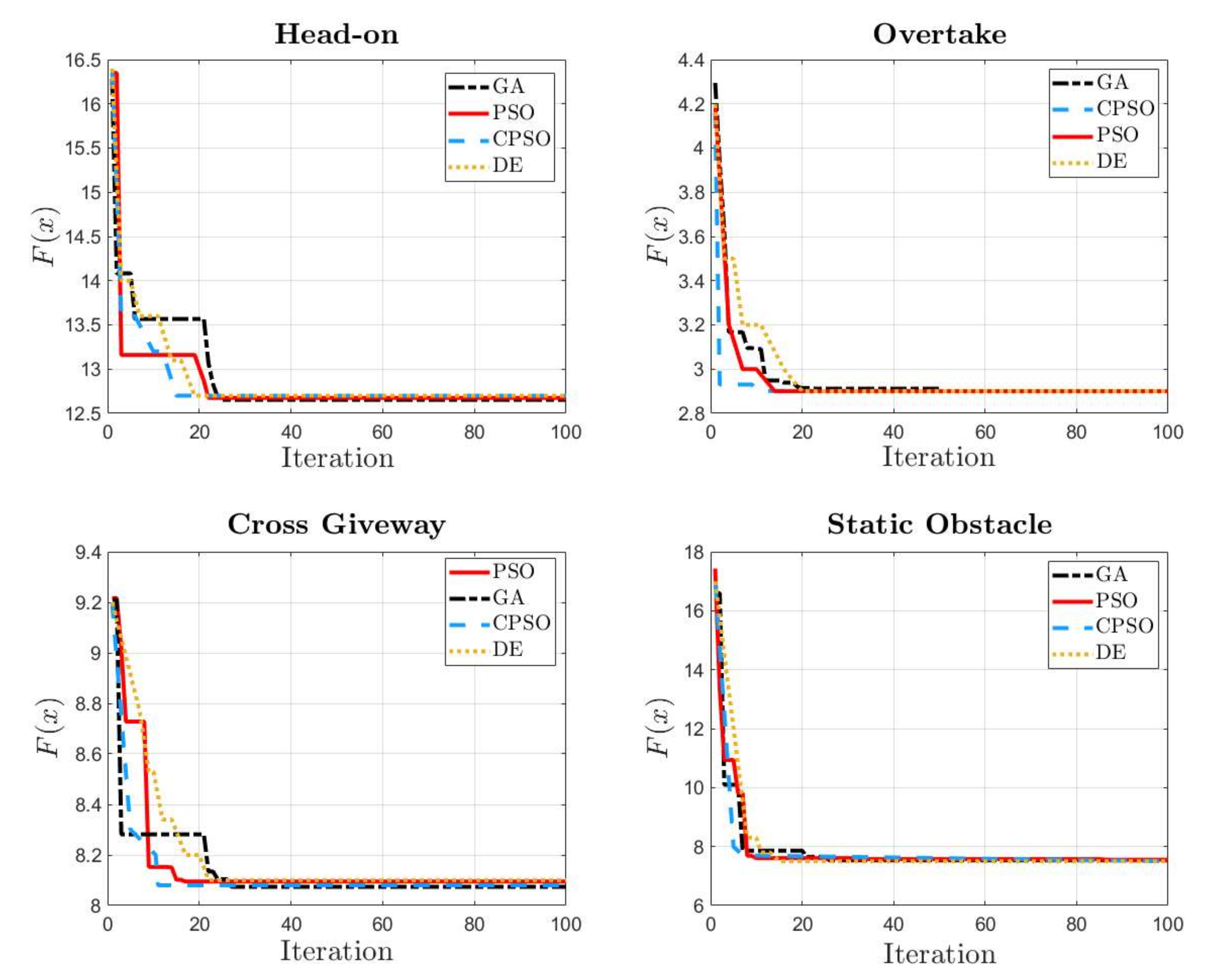
3.4. Optimisation Algorithm
- 1.
- Initialise the population: The population is a set of particles, each with its position and velocity. For every particle in the population, its position is randomly initialised in the decision space, and its velocity is initially set to 0, and the archive is initialised as an empty set.
- 2.
- Select the local and global best: The local best is the best position of the particle achieved, while the global best is the best position in the population, which are all selected according to the proposed objective function.
- 3.
- Update the position and velocity of individual particles: The population of the particles moves in the search space according to two simple mathematical formulae for the particle’s position and velocity as follows:
4. Numerical Simulations and Hardware-in-the-Loop Tests
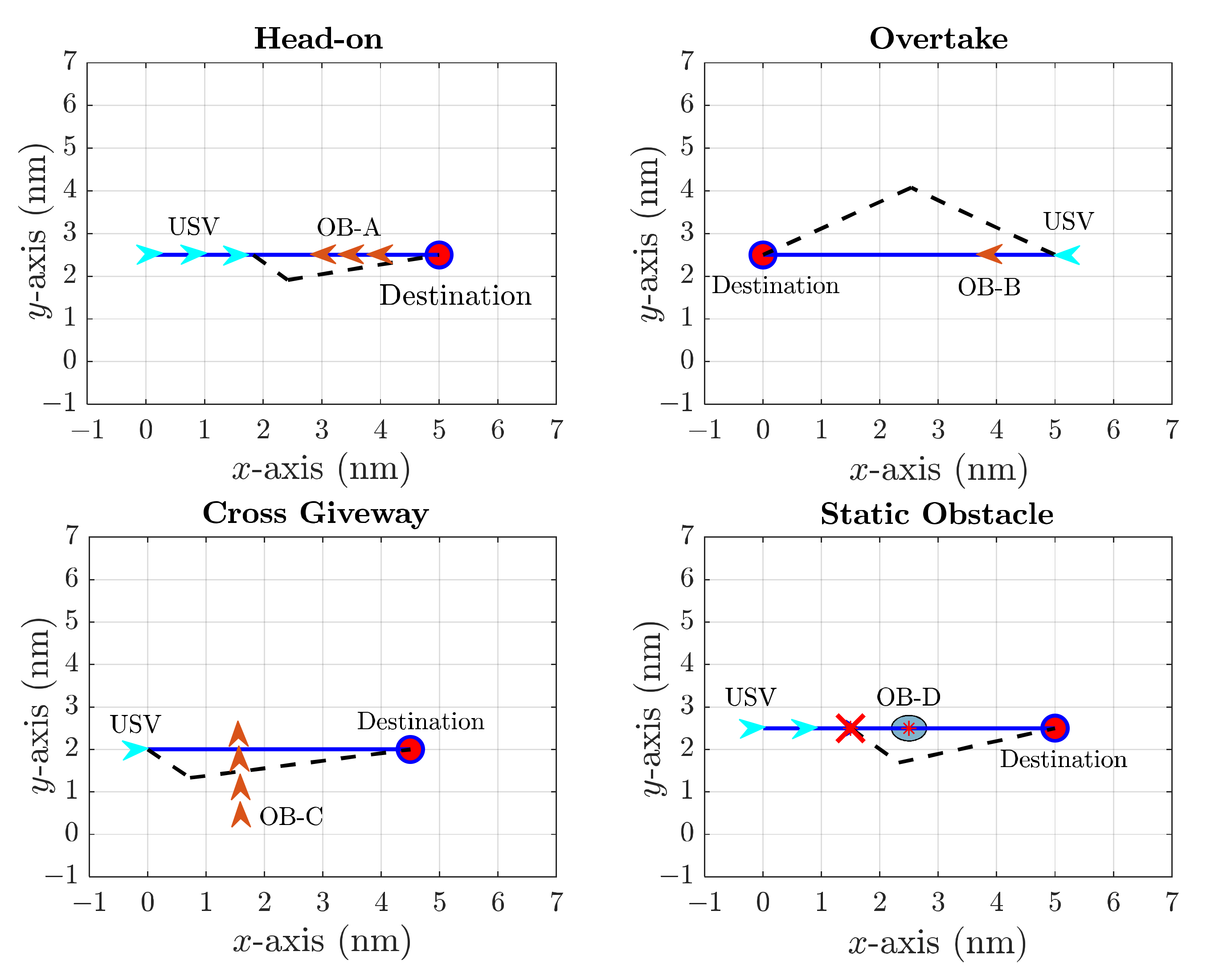
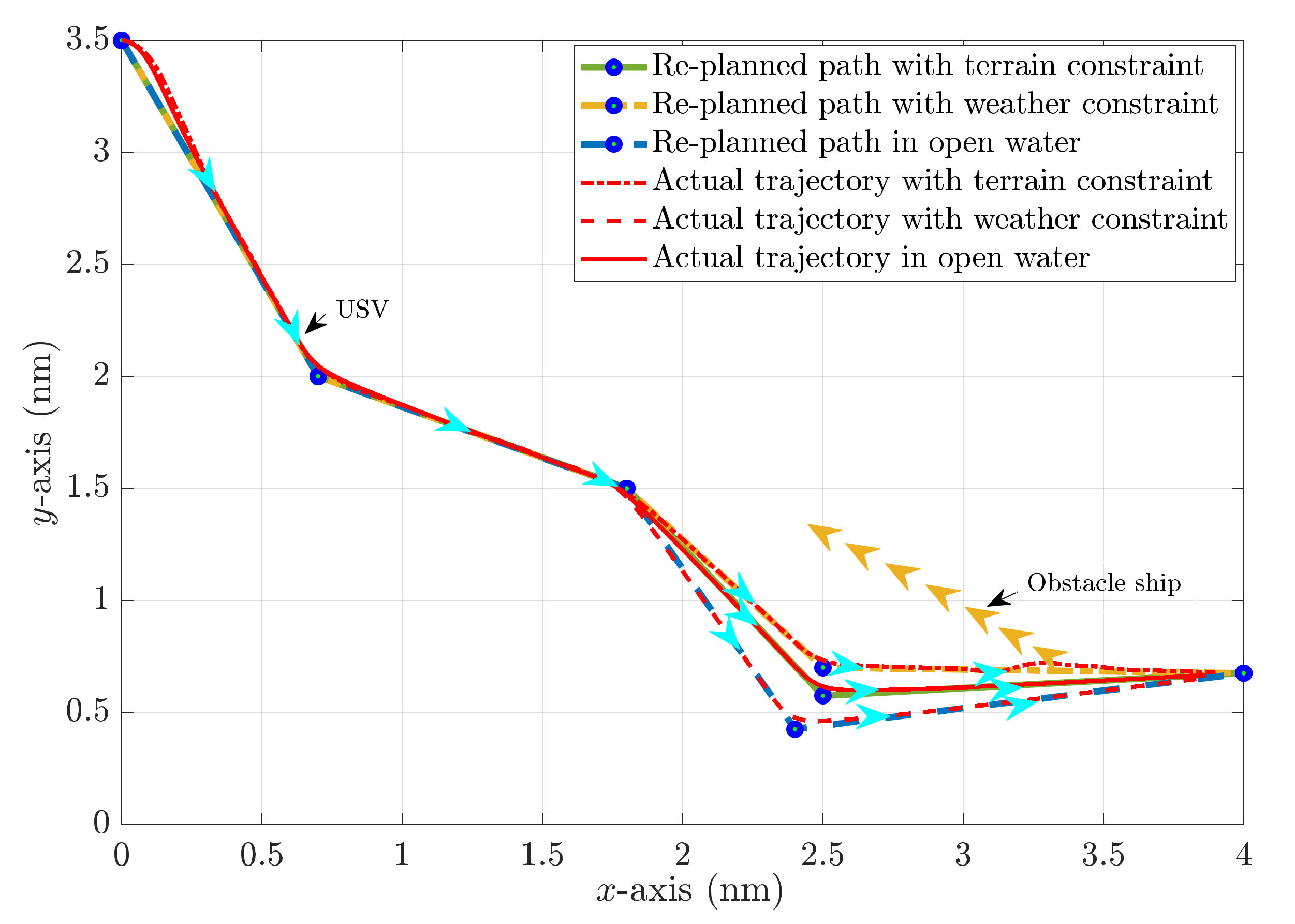
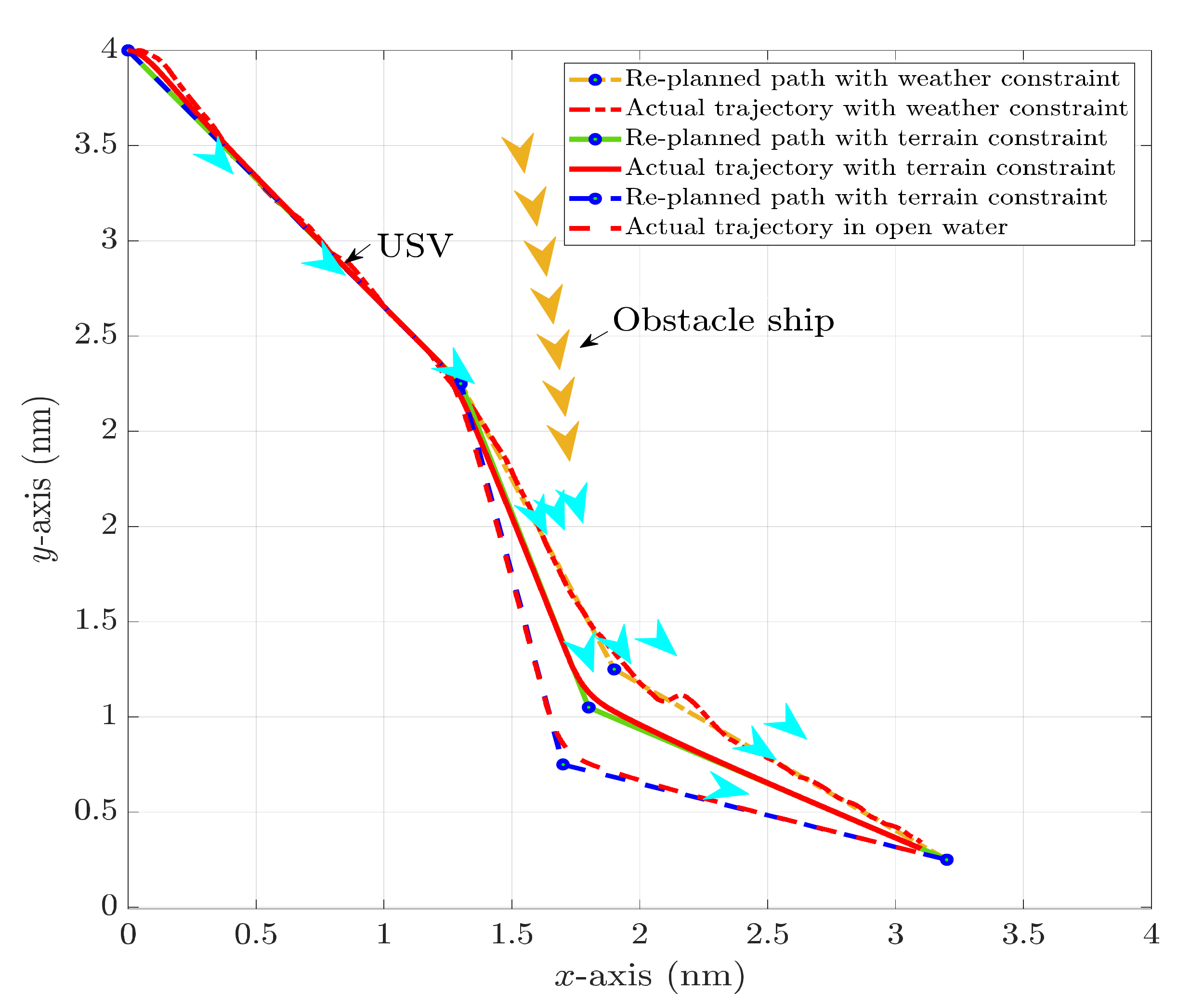
4.1. Numerical Simulations
4.2. Hardware-in-the-Loop Tests
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Zhu, G.; Ma, Y.; Li, Z.; Malekian, R.; Sotelo, M. Adaptive neural output feedback control for MSVs with predefined performance. IEEE Trans. Veh. Technol. 2021, 70, 2994–3006. [Google Scholar] [CrossRef]
- Zhang, X.; Wang, C.; Jiang, L.; An, L.; Yang, R. Collision-avoidance navigation systems for Maritime Autonomous Surface Ships: A state of the art survey. Ocean Eng. 2021, 235, 109380. [Google Scholar] [CrossRef]
- Huang, Y.; Chen, L.; Chen, P.; Negenborn, R.R.; van Gelder, P.H.A.J.M. Ship collision avoidance methods: State-of-the-art. Saf. Sci. 2020, 121, 451–473. [Google Scholar] [CrossRef]
- Wang, H.; Liu, Z.; Wang, X.; Graham, T.; Wang, J. An analysis of factors affecting the severity of marine accidents. Reliab. Eng. Syst. Saf. 2021, 210, 107513. [Google Scholar] [CrossRef]
- De Vos, J.; Hekkenberg, R.G.; Banda, O.A.V. The Impact of Autonomous Ships on Safety at Sea–A Statistical Analysis. Reliab. Eng. Syst. Saf. 2021, 210, 107558. [Google Scholar] [CrossRef]
- Yan, X.; Jiang, D.; Miao, R.; Li, Y. Formation Control and Obstacle Avoidance Algorithm of a Multi-USV System Based on Virtual Structure and Artificial Potential Field. J. Mar. Sci. Eng. 2021, 9, 161. [Google Scholar] [CrossRef]
- Xu, X.; Pan, W.; Huang, Y.; Zhang, W. Dynamic Collision Avoidance Algorithm for Unmanned Surface Vehicles via Layered Artificial Potential Field with Collision Cone. J. Navig. 2020, 73, 1306–1325. [Google Scholar] [CrossRef]
- Song, L.; Shi, X.; Sun, H.; Xu, K.; Huang, L. Collision Avoidance Algorithm for USV Based on Rolling Obstacle Classification and Fuzzy Rules. J. Mar. Sci. Eng. 2021, 9, 1321. [Google Scholar] [CrossRef]
- Hu, Y.; Meng, X.; Zhang, Q.; Park, G.-K. A Real-Time Collision Avoidance System for Autonomous Surface Vessel Using Fuzzy Logic. IEEE Access 2020, 8, 108835–108846. [Google Scholar] [CrossRef]
- Benjamin, M.R.; Leonard, J.J.; Curcio, J.A.; Newman, P.M. A method for protocol-based collision avoidance between autonomous marine surface craft. J. Field Robot. 2006, 23, 333–346. [Google Scholar] [CrossRef] [Green Version]
- Zhao, L.; Roh, M.-I. COLREGs-compliant multiship collision avoidance based on deep reinforcement learning. Ocean Eng. 2019, 191, 106436. [Google Scholar] [CrossRef]
- Li, L.; Wu, D.; Huang, Y.; Yuan, Z.-M. A path planning strategy unified with a COLREGS collision avoidance function based on deep reinforcement learning and artificial potential field. Appl. Ocean Res. 2021, 113, 102759. [Google Scholar] [CrossRef]
- Zaccone, R. COLREG-Compliant Optimal Path Planning for Real-Time Guidance and Control of Autonomous Ships. J. Mar. Sci. Eng. 2021, 9, 405. [Google Scholar] [CrossRef]
- Hu, L.; Naeem, W.; Rajabally, E.; Watson, G.; Mills, T.; Bhuiyan, Z.; Salter, I. Colregs-compliant path planning for autonomous surface vehicles: A multiobjective optimization approach. IFAC-Pap. 2017, 50, 13662–13667. [Google Scholar]
- Hu, L.; Naeem, W.; Rajabally, E.; Watson, G.; Mills, T.; Bhuiyan, Z.; Raeburn, C.; Salter, I.; Pekcan, C. A multiobjective optimization approach for COLREGs-compliant path planning of autonomous surface vehicles verified on networked bridge simulators. IEEE Trans. Intell. Transp. Syst. 2020, 21, 1167–1179. [Google Scholar] [CrossRef] [Green Version]
- Pietrzykowski, Z.; Uriasz, J. The Ship Domain–A Criterion of Navigational Safety Assessment in an Open Sea Area. J. Navig. 2009, 62, 93–108. [Google Scholar] [CrossRef]
- Zorović, D. International Regulations for Preventing Collisions at Sea (COLREGs) amendment proposal. Pomor. Zb. 2018, 55, 229–230. [Google Scholar] [CrossRef]
- Zhang, J.; Zhang, D.; Yan, X.; Haugen, S.; Soares, C.G. A distributed anti-collision decision support formulation in multi-ship encounter situations under COLREGs. Ocean Eng. 2015, 105, 336–348. [Google Scholar] [CrossRef]
- Smierzchalski, R.; Michalewicz, Z. Modeling of ship trajectory in collision situations by an evolutionary algorithm. IEEE Trans. Evol. Comput. 2000, 4, 227–241. [Google Scholar] [CrossRef] [Green Version]
- Acanfora, M.; Montewka, J.; Hinz, T.; Matusiak, J. Towards realistic estimation of ship excessive motions in heavy weather. A case study of a containership in the Pacific Ocean. Ocean Eng. 2017, 138, 140–150. [Google Scholar] [CrossRef]
- Available online: https://www.marineinsight.com/marine-navigation/effects-of-rogue-wave-on-ships/ (accessed on 1 June 2022).
- Wang, J.; Wang, S. Geographical Information Enhanced Recognition of Traffic Modes and Behavior Patterns. IEEE Trans. Intell. Transp. Syst. 2022, 23, 3777–3782. [Google Scholar] [CrossRef]
- Ning, J.; Chen, H.; Li, T.; Li, W.; Li, C. COLREGs-Compliant unmanned surface vehicles collision avoidance based on multi-objective genetic algorithm. IEEE Access 2020, 8, 190367–190377. [Google Scholar] [CrossRef]
- Li, J.; Wang, H.; Zhao, W.; Xue, Y. Ship’s trajectory planning based on improved multiobjective algorithm for collision avoidance. J. Adv. Transp. 2019, 2019, 4068783. [Google Scholar] [CrossRef]
- Lalwani, S.; Singhal, S.; Kumar, R.; Gupta, N. A comprehensive survey: Applications of multi-objective particle swarm optimization (MOPSO) algorithm. Trans. Comb. 2013, 2, 39–101. [Google Scholar]
- Oral, T.; Polat, F. MOD* Lite: An Incremental Path Planning Algorithm Taking Care of Multiple Objectives. IEEE Trans. Cybern. 2015, 46, 245–257. [Google Scholar] [CrossRef]
- Gunantara, N. A review of multi-objective optimization: Methods and its applications. Cogent Eng. 2018, 5, 1502242. [Google Scholar] [CrossRef]
- Clerc, M.; Kennedy, J. The particle swarm-explosion, stability, and convergence in a multidimensional complex space. IEEE Trans. Evol. Comput. 2002, 6, 58–73. [Google Scholar] [CrossRef] [Green Version]
- Available online: http://www.yunzhou-tech.com (accessed on 1 June 2022).
- Li, C.; Jiang, J.; Duan, F.; Liu, W.; Wang, X.; Bu, L.; Sun, Z.; Yang, G. Modeling and Experimental Testing of an Unmanned Surface Vehicle with Rudderless Double Thrusters. Sensors 2019, 19, 2051. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Jiang, Q.; Liao, Y.; Li, Y.; Miao, Y.; Jiang, W.; Cheng, C. Unmanned surface vessel heading control of model-free adaptive method with variable integral separated and proportion control. Int. J. Adv. Robot. Syst. 2019, 16, 1729881419831584. [Google Scholar] [CrossRef] [Green Version]
- Liu, Y.; Sun, W.; Gao, H. High precision robust control for periodic tasks of linear motor via B-spline wavelet neural network observer. IEEE Trans. Ind. Electron. 2022, 69, 8255–8263. [Google Scholar] [CrossRef]
- Zhu, G.; Ma, Y.; Li, Z.; Malekian, R.; Sotelo, M. Event-Triggered Adaptive Neural Fault-Tolerant Control of Underactuated MSVs with Input Saturation. IEEE Trans. Intell. Transp. Syst. 2021, 23, 7045–7057. [Google Scholar] [CrossRef]























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sea State | wf | wg | wh |
|---|---|---|---|
| Level:0, Wave height: 0 m, Wind: 0 | 0.45 | 0.04 | 0.51 |
| Level:1, Wave height:0–0.1 m, Wind: 1 | 0.45 | 0.04 | 0.51 |
| Level:2, Wave height:0.1–0.5 m, Wind: 2 | 0.45 | 0.04 | 0.51 |
| Level:3, Wave height:0.5–1.25 m, Wind: 3–4 | 0.45 | 0.08↑ | 0.47↓ |
| Level:4, Wave height:1.25–2.5 m, Wind: 5 | 0.45 | 0.10↑ | 0.45↓ |
| Level:5, Wave height:2.5–4 m, Wind: 6 | 0.45 | 0.12↑ | 0.43↓ |
| Sea State | |
|---|---|
| Level:0, Wave height: 0 m, Wind: 0 | 60° |
| Level:1, Wave height:0–0.1 m, Wind: 1 | 60° |
| Level:2, Wave height:0.1–0.5 m, Wind: 2 | 60° |
| Level:3, Wave height:0.5–1.25 m, Wind: 3–4 | 50° |
| Level:4, Wave height:1.25–2.5 m, Wind: 5 | 40° |
| Level:5, Wave height:2.5–4 m, Wind: 6 | 30° |
| Parameters | Vaule |
|---|---|
| Total length | 5.5 m |
| Breadth | 2.4 m |
| Draft | 0.45 m |
| Maximum speed | 10 kn |
| Mass | 1429 kg |
| Distance between two propellers | 0.72 m |
| Diameter of the propeller | 0.3 m |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gu, Y.; Rong, Z.; Tong, H.; Wang, J.; Si, Y.; Yang, S. Unmanned Surface Vehicle Collision Avoidance Path Planning in Restricted Waters Using Multi-Objective Optimisation Complying with COLREGs. Sensors 2022, 22, 5796. https://doi.org/10.3390/s22155796
Gu Y, Rong Z, Tong H, Wang J, Si Y, Yang S. Unmanned Surface Vehicle Collision Avoidance Path Planning in Restricted Waters Using Multi-Objective Optimisation Complying with COLREGs. Sensors. 2022; 22(15):5796. https://doi.org/10.3390/s22155796
Chicago/Turabian StyleGu, Yang, Zhenwei Rong, Huzhou Tong, Jia Wang, Yulin Si, and Shujie Yang. 2022. "Unmanned Surface Vehicle Collision Avoidance Path Planning in Restricted Waters Using Multi-Objective Optimisation Complying with COLREGs" Sensors 22, no. 15: 5796. https://doi.org/10.3390/s22155796
APA StyleGu, Y., Rong, Z., Tong, H., Wang, J., Si, Y., & Yang, S. (2022). Unmanned Surface Vehicle Collision Avoidance Path Planning in Restricted Waters Using Multi-Objective Optimisation Complying with COLREGs. Sensors, 22(15), 5796. https://doi.org/10.3390/s22155796