4.1.1. Simulations and Analysis of the Noise with Single-Gaussian Distribution
In this section, we compare the proposed algorithm with other existing algorithms by using a maneuvering target tracking example that is generated based on the model (3) and (7) with
s and verifies the higher estimate performance of our algorithm. The single-Gaussian process and measurement noise are given as follows:
In this experiment, the root-mean-square error (RMSE) of position, velocity acceleration, and jerk is used as the comparison criterion in the simulation, which is defined as
where
denotes the real value obtained at time
k in a certain direction,
T represents the time of filtering iteration, and
is the estimated value of the filter at time
k in a certain direction. For comparison of various aspects, the mean absolute error (MAE) is also used as the comparison criterion in the simulation, which is denoted by
In the MSHARKF and proposed SR-SHARKF algorithms, the initial values of two constants are chosen as , . The parameters of the initial true state are assumed to be , . In addition, the square-root decomposition method (SRD), the three-segment method (TS), and the noise covariance adjustment method (NCA) are introduced to the simulation test as comparative methods to evaluate the advantages of each portion of the proposed algorithm.
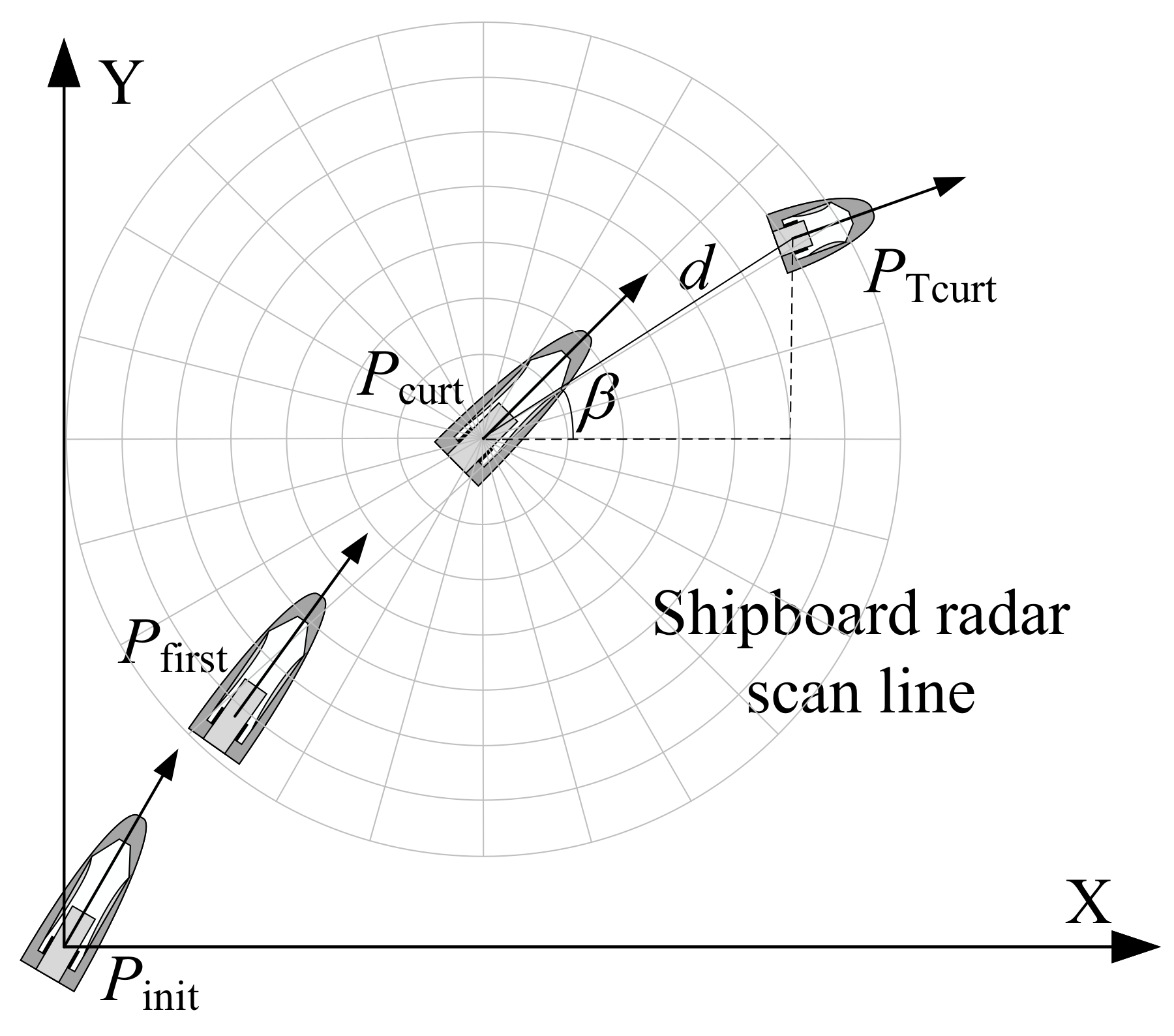
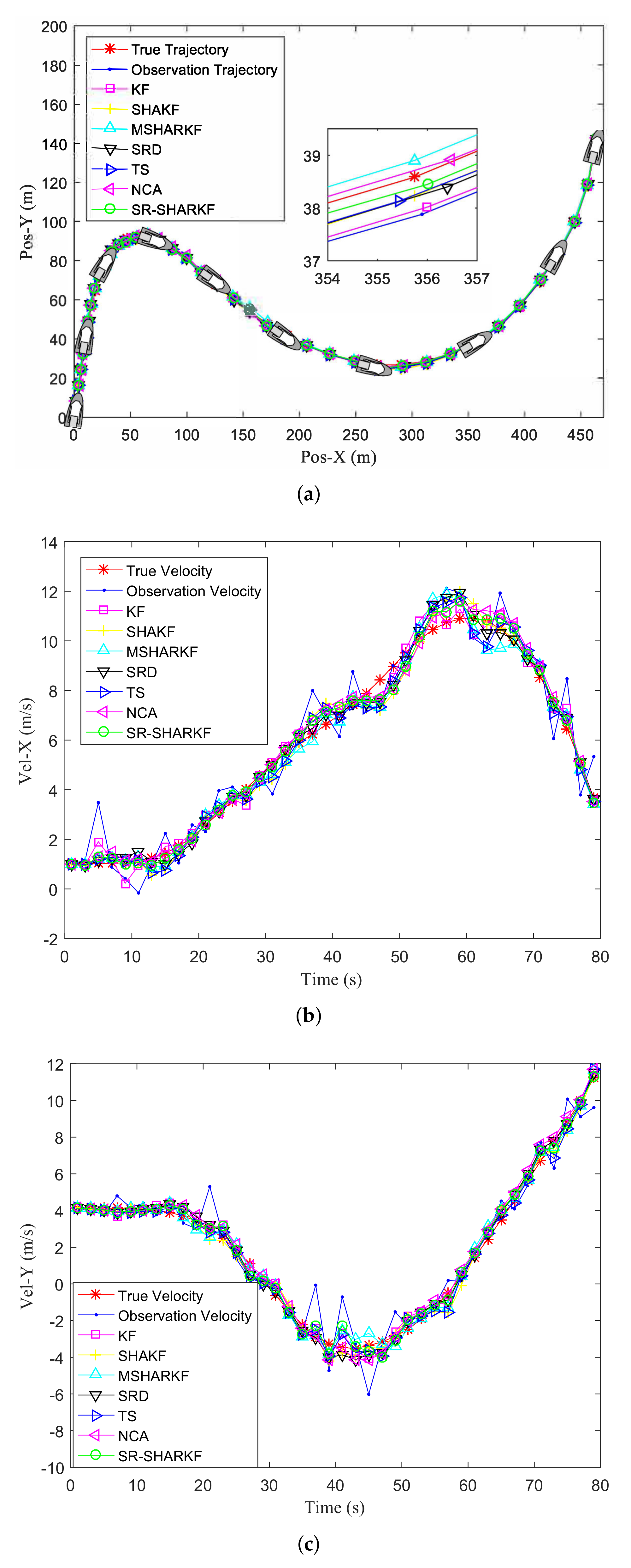
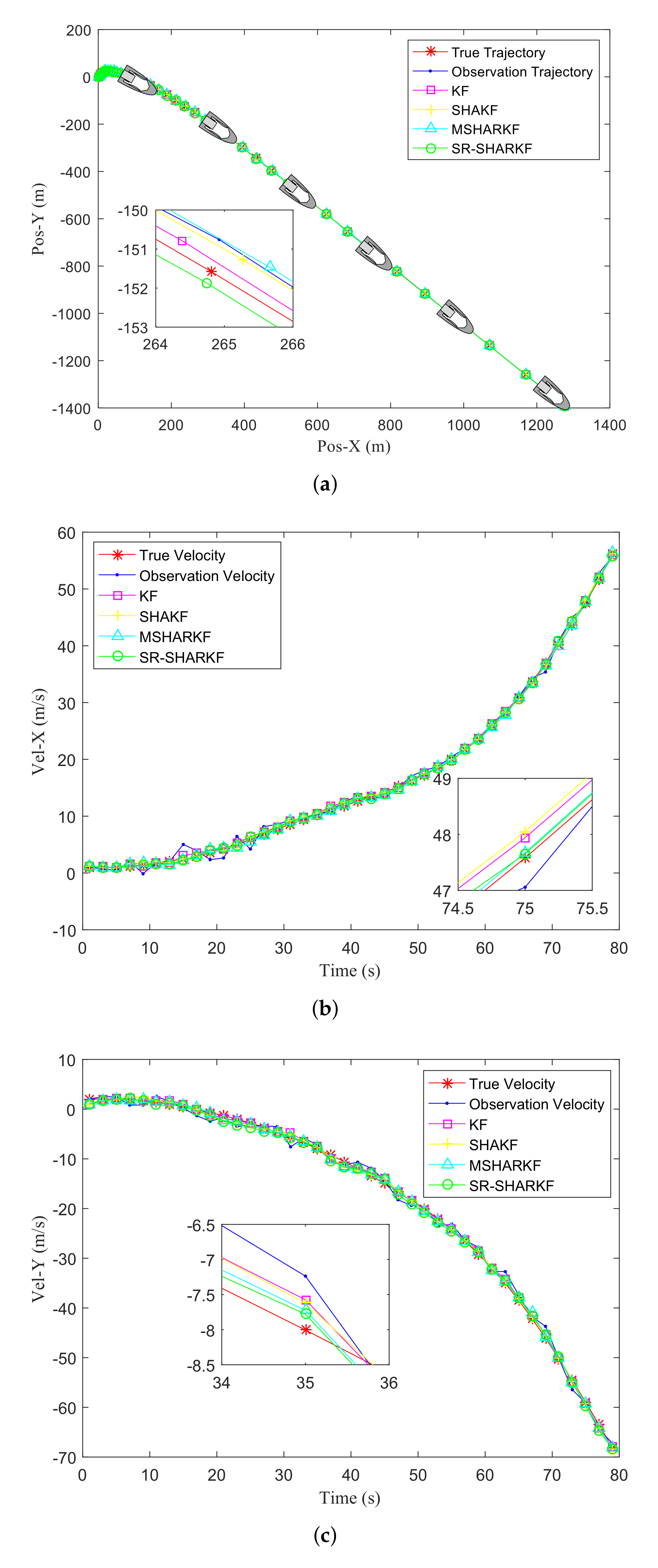
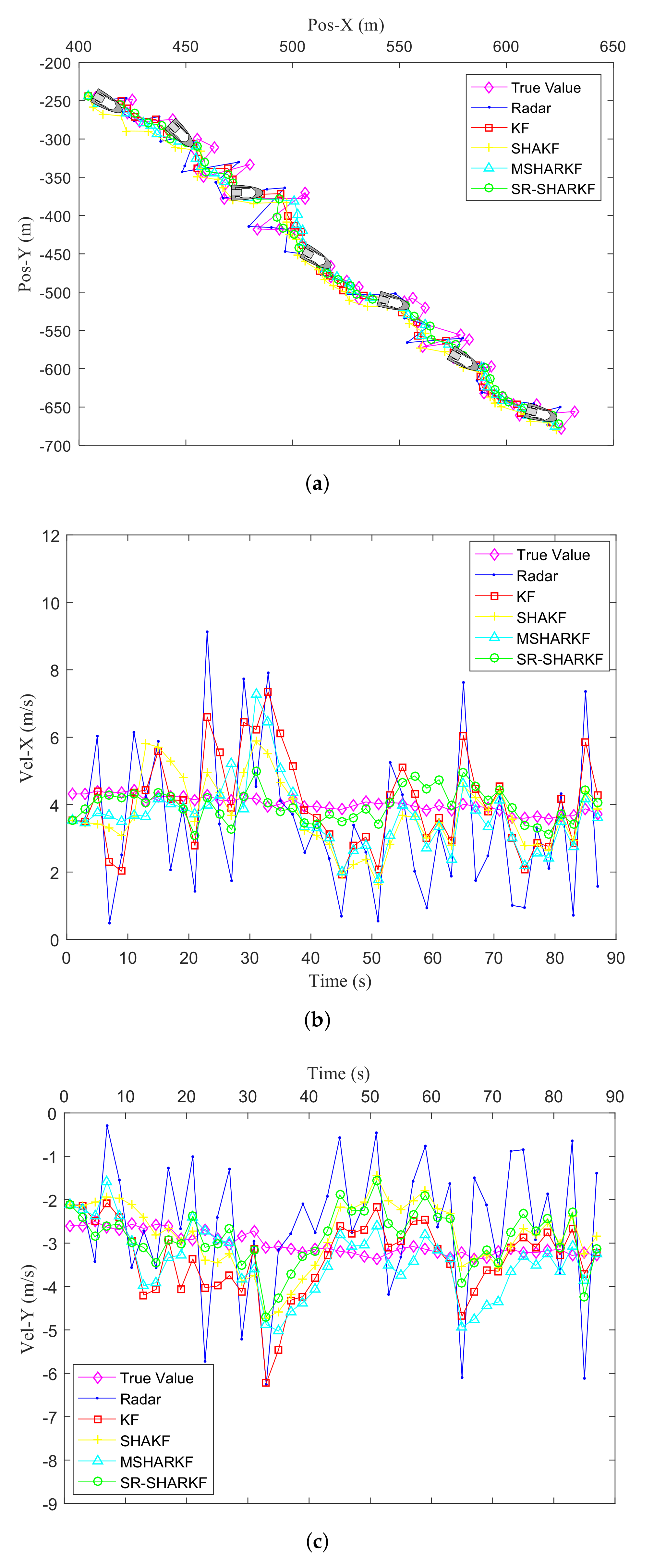
Figure 3a shows the actual trajectory, the observation trajectory of the target, and the trajectory estimated by the KF, SHAKF, MSHARKF, SRD, TS, NCA, and proposed SR-SHARKF algorithms. Moreover, the target ship is represented by the small boats in
Figure 3a, and their movement on the motion trajectory will be displayed by several boats at various location points, which can reflect the real movement of the target ship more clearly. The actual ship determines the current position of the target ship at each given time by mapping the information of the target ship measured at various times to the coordinates of the Cartesian coordinate system.
Figure 3b,c show the actual, observation, and filtering velocities of the X-axis and Y-axis. It can be seen from
Figure 3 that the tracking effect in some states is not ideal, but in terms of the overall effect, the proposed SR-SHARKF algorithm achieves satisfactory results in filtering the measurement data compared to other algorithms. Moreover, the runtimes of the KF, SHAKF, MSHARKF, and proposed SR-SHARKF algorithms in a single step run are
,
,
, respectively.
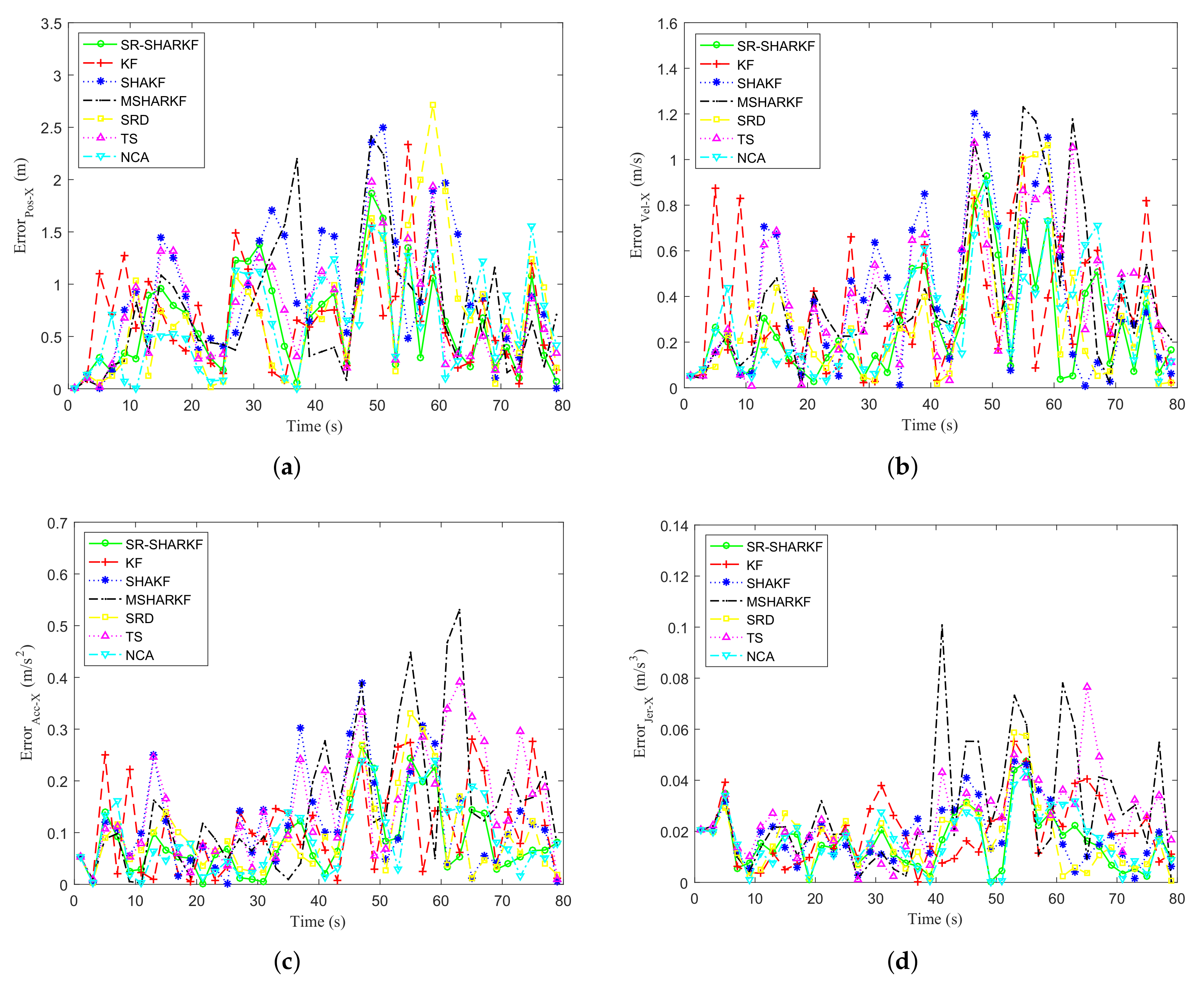
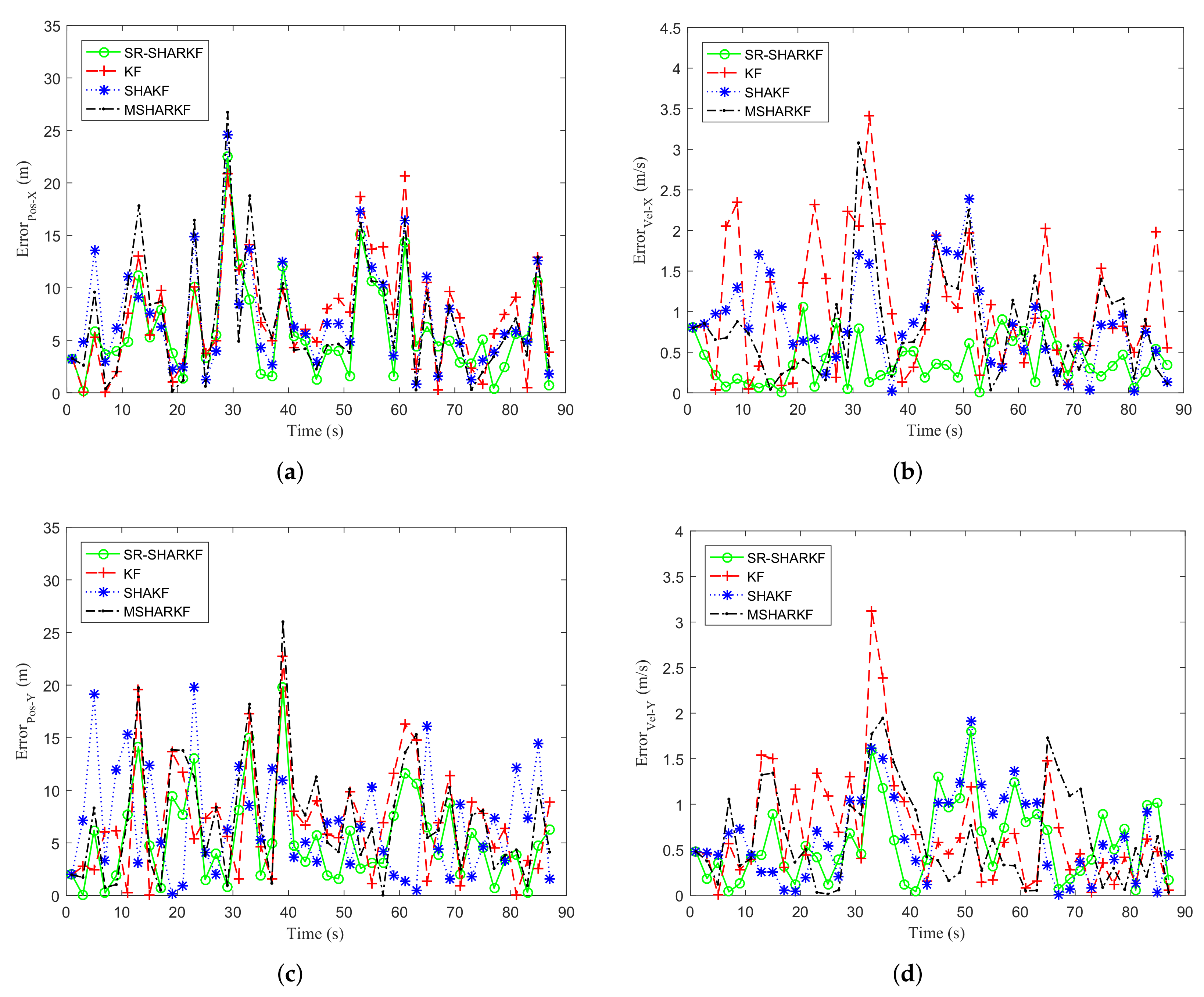
Taking the deviation between the true and the estimated value, the KF, SHAKF, MSHARKF, SRD, TS, NCA, and SR-SHARKF algorithms are used in radar target tracking and the simulation error curves of position, velocity, acceleration, and jerk on the X-axis are shown in
Figure 4a–d. It can be seen from
Figure 4 that the SRD, TS, and NCA methods for each part of the proposed algorithm have more stable error values compared to SHAKF, and the percentage of states with error values less than SHAKF is higher. As can also be seen from
Figure 4, the SR-SHARKF algorithm outperforms other algorithms because the error of most states is kept at a relatively low level and is relatively stable.
According to
Table 1, SRD, TS, and NCA have smaller RMSE and MAE values of position, velocity, acceleration, and jerk on the X-axis compared with SHAKF and MSHARKF, indicating that SRD, TS, and NCA can improve SHAKF better. Furthermore, the RMSE and MAE values corresponding to the proposed SR-SHARKF algorithm of position, velocity, acceleration, and jerk on the X-axis are lower compared to other algorithms, which demonstrates that it can obtain the most accurate estimation results than other algorithms in all four state variables and two aspects.
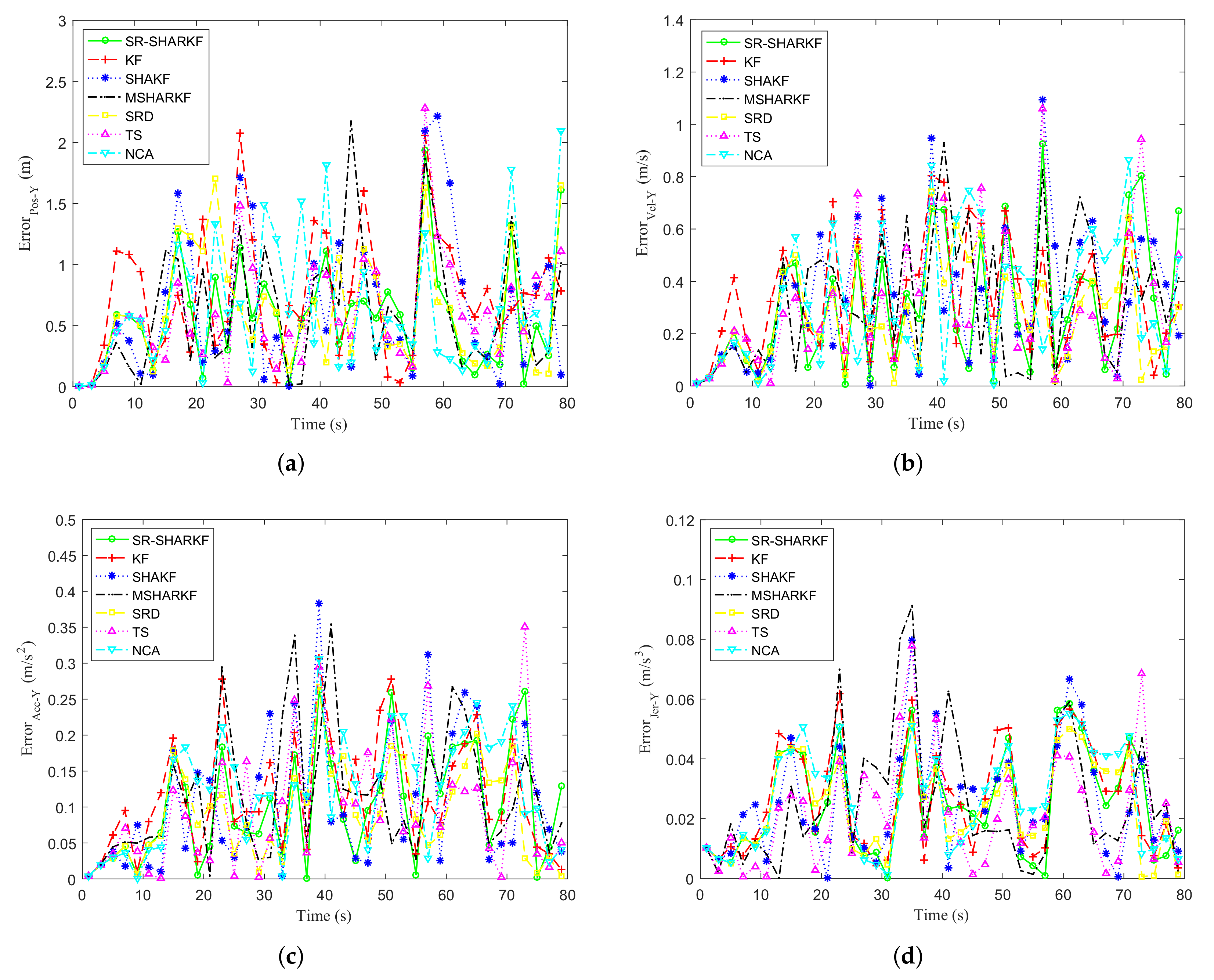
In the Y-axis direction, the ship’s heading varied twice in the opposite direction. It can be seen from
Figure 5 that SRD, TS, and NCA are more stable compared to other comparison algorithms, and the error of the algorithm we proposed still remains in a relatively low and stable state compared with other algorithms, which further verifies its relatively outstanding filtering effect. In addition, the RMSE and MAE values of each algorithm are recorded in
Table 2, in which it can be seen that the SRD, TS, NCA, and SR-SHARKF algorithms also have obvious advantages in target tracking compared with other algorithms. These results further demonstrate the superior performance of the proposed method.
In the simulation test, compared with the previous ones, the proposed algorithm effectively reduces the appearance rate of non-positive matrices in the X-axis and Y-axis directions, which is due to the effective elimination of numerical rounding errors by the SRD method for covariance decomposition, and the interval restriction of the Q-matrix and R-matrix, as well as the transformation of non-positive to positive matrices by the NCA method together preventing the filtering divergence. Moreover, it can be seen from the simulation tests that the proposed algorithm has significantly improved the speed of adaptation of the time-varying noise covariance compared with the previous ones, which is due to the TS method being employed in the proposed algorithm to balance the observations and predicted states to improve the robustness of the algorithm.
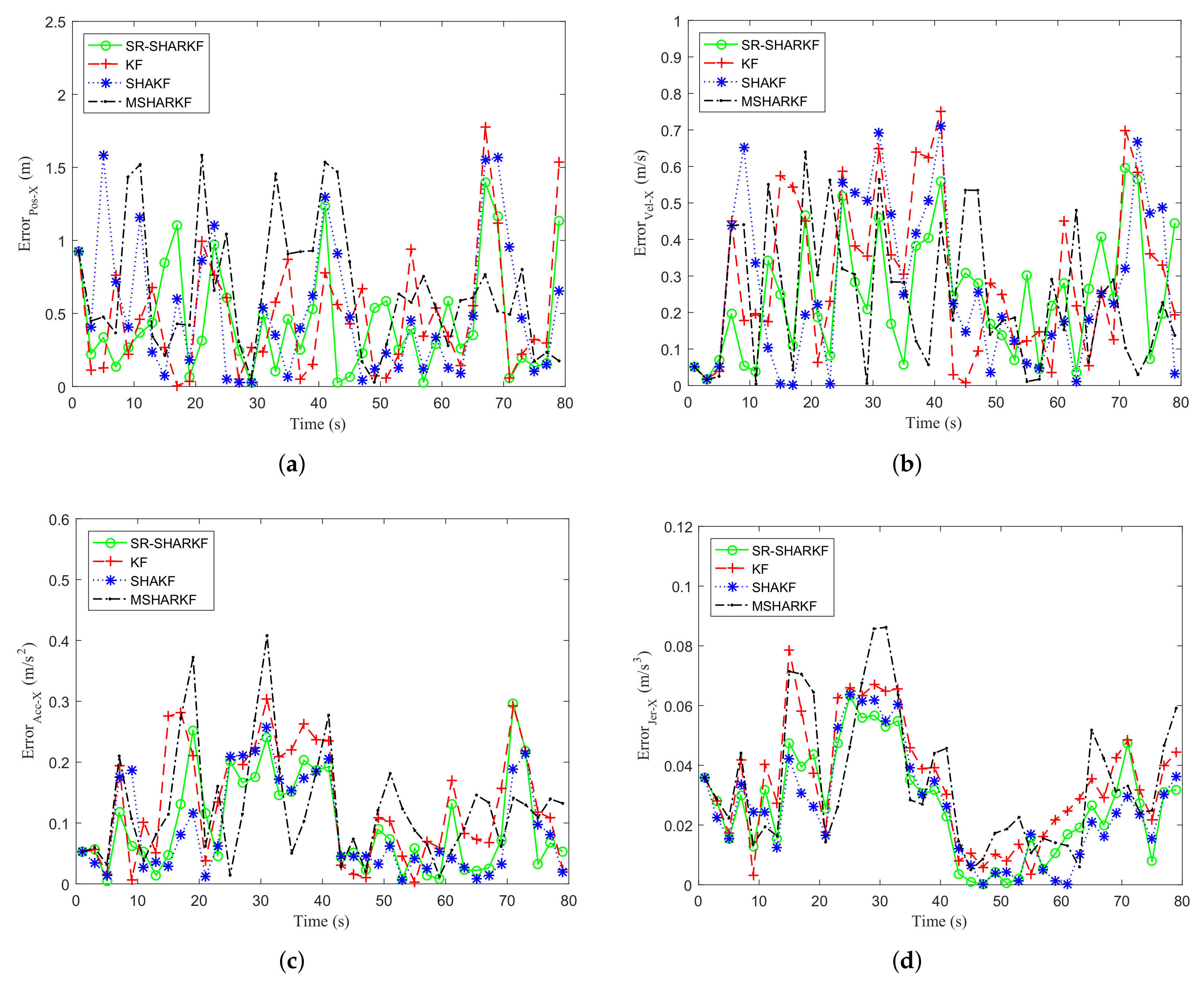
To further verify the robustness of the proposed algorithm, another set of simulation tests was performed for the same model and different trajectories. We only compared the proposed algorithm with the KF, SHAKF, and MSHARKF algorithms. The parameters of the initial true state were chosen as , .
Figure 6a shows the actual trajectory, the observation trajectory of the target, and the trajectory estimated by the KF, SHAKF, MSHARKF, and proposed SR-SHARKF algorithms.
Figure 6b,c show the actual, observation, and filtering velocities of the X-axis and Y-axis. From
Figure 6, it can be seen that the proposed SR-SHARKF algorithm outperforms other algorithms in filtering the measurement data.
In the X-axis direction, the USV sails in a positive direction and has a rapid speed change. It can be observed from
Figure 7 and
Table 3 that the proposed SR-SHARKF has a higher percentage of smaller error values than other algorithms, and the RMSE and MAE values corresponding to the proposed SR-SHARKF algorithm of position, velocity, acceleration, and jerk are lower compared to other algorithms, which shows the superiority of the proposed algorithm over other algorithms.
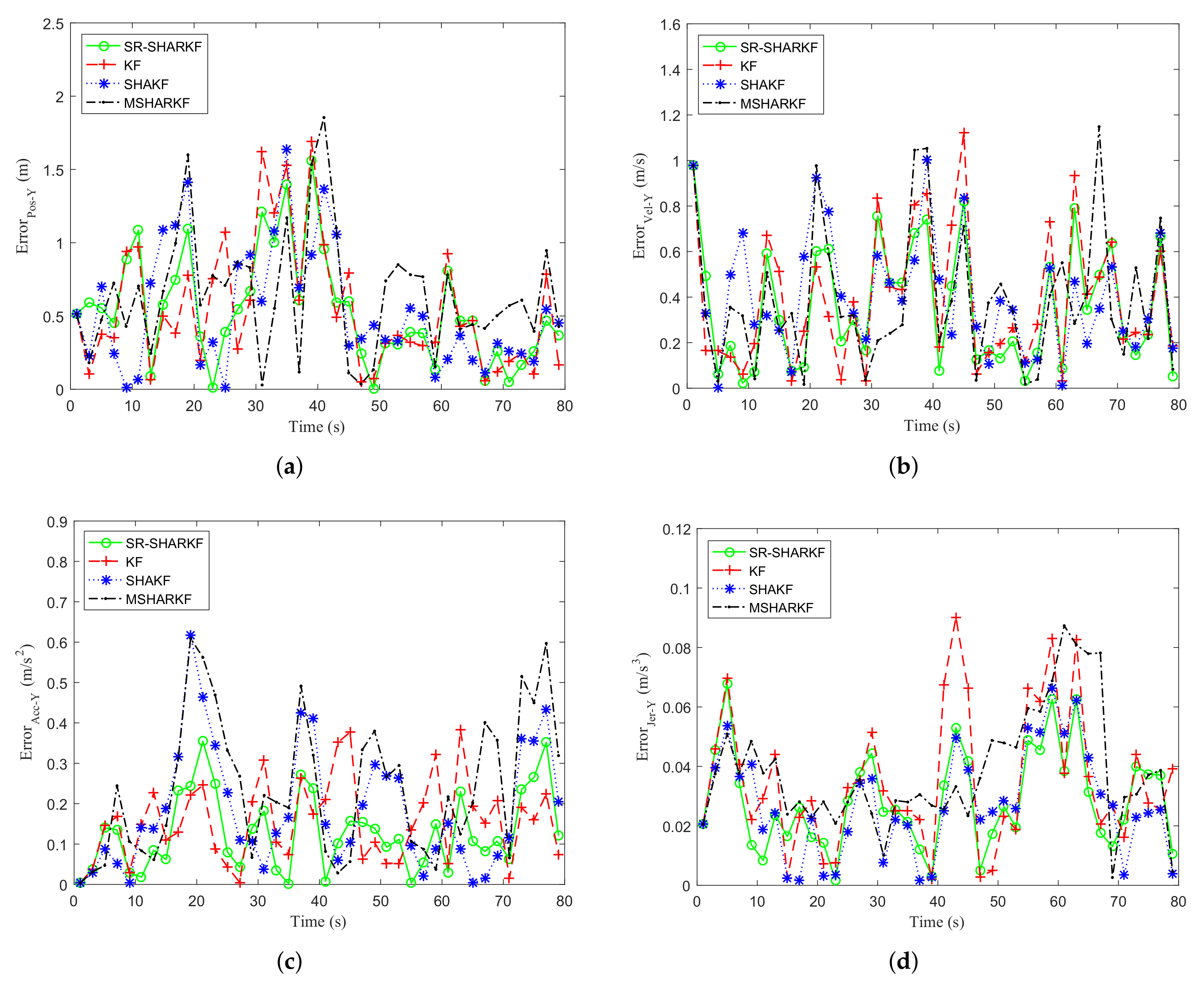
In the Y-axis direction, the USV sails in a negative direction and the speed changes faster. It can be observed from
Figure 8 and
Table 4 that the faster the speed change, the worse the tracking effect of all algorithms. However, the proposed SR-SHARKF still outperforms other algorithms, indicating that the algorithm can also bring better performances for different trajectories.
4.1.2. Simulations and Analysis of the Noise with Mixed-Gaussian Distribution
The same model as above is used to generate a maneuvering target tracking example except that the process and measurement noise are white noise satisfying the mixed-Gaussian distribution. The mixed-Gaussian process and measurement noise are given as follows:
In this experiment, the initial values of two constants with respect to the MSHARKF and proposed SR-SHARKF algorithms are also chosen as
,
. The parameters of the initial true state are assumed to be
,
. The RMSE is employed as the comparison criterion, but the true value
and the estimated value
at the
kth moment of the
ith MC run are used instead of
and
, and we replace
T by the number of MC runs
. The averaged root-mean-squared error (ARMSE) of position, velocity acceleration, and jerk is also used as the evaluation criterion to test the filter performance, which is defined as
To evaluate the dispersion of position, velocity, acceleration, and jerk for all algorithms over 1000 Monte Carlo runs, the standard deviation (STD) and the averaged STD (ASTD) as the evaluation criteria are defined as follows
where
represents the mean of the algorithm estimates for position, velocity, acceleration, or jerk.
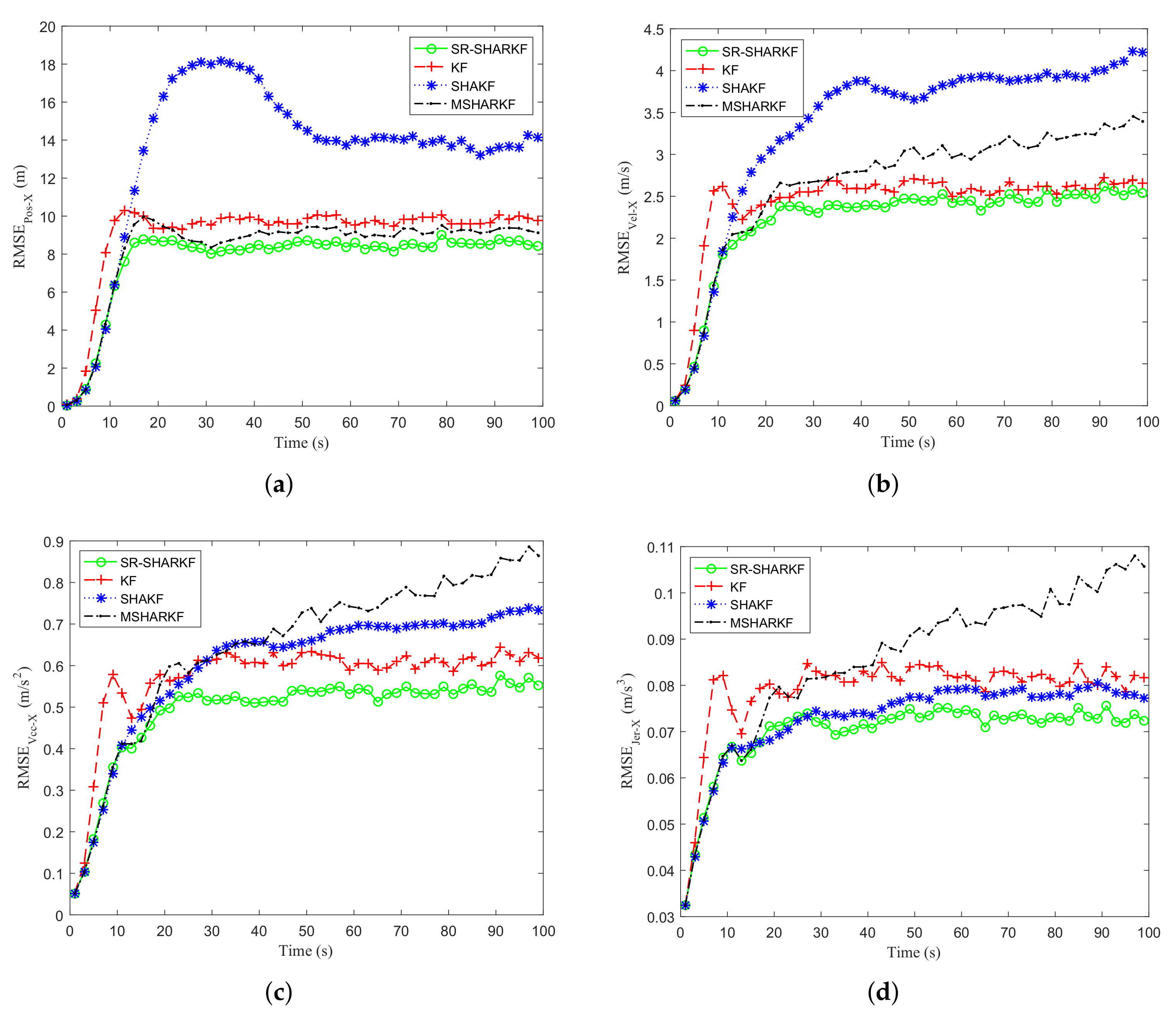
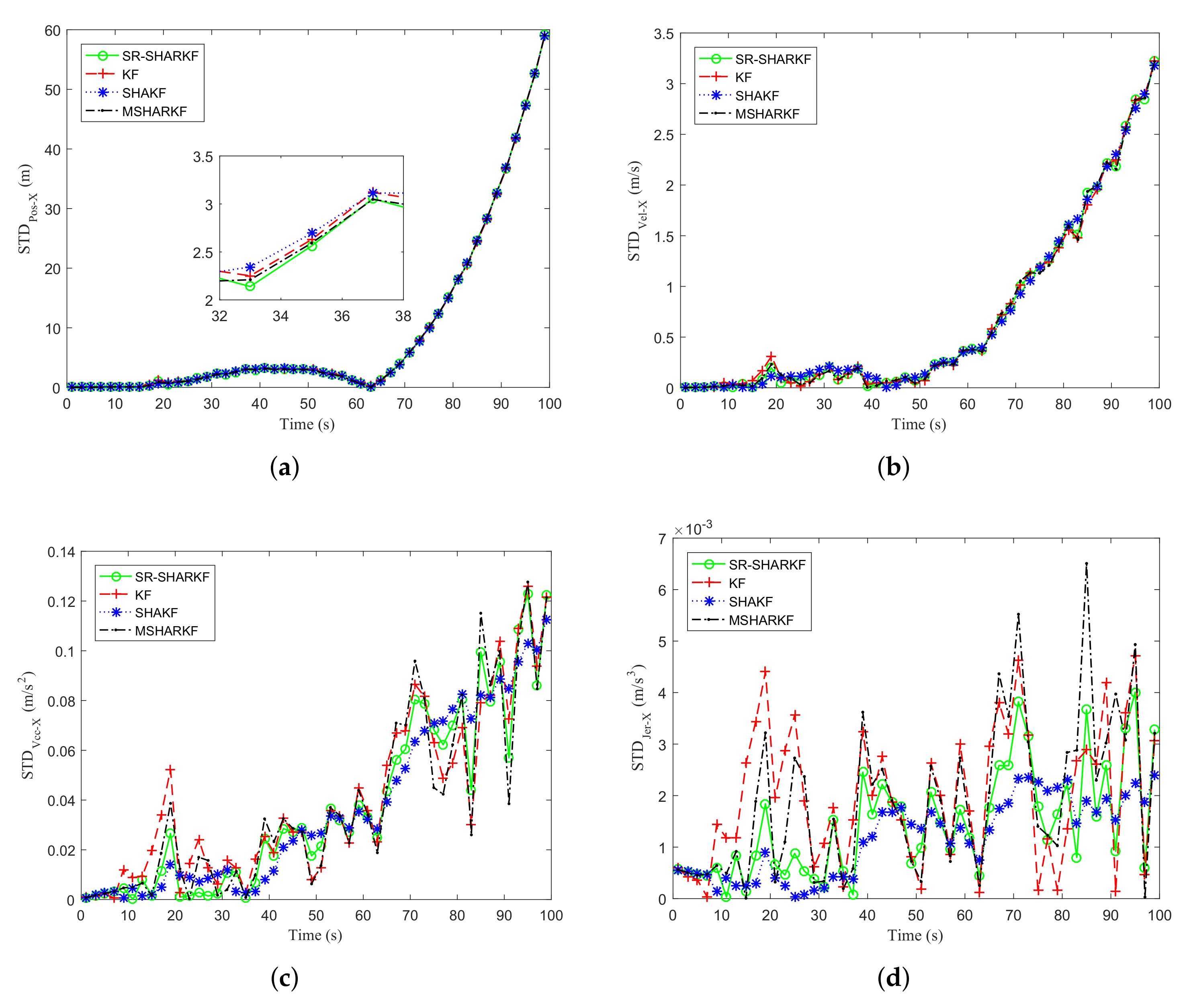
Figure 9a–d and
Figure 10a–d show that the RMSE and STD of position, velocity, acceleration, and jerk on the X-axis are calculated as the average and standard deviation of each state over 1000 Monte Carlo runs. It can be seen from
Figure 9a–d that the RMSEs of SHAKF and MSHARKF have different degrees of divergence in terms of position, velocity, acceleration, or jerk, which is caused by their inability to estimate the noise covariance accurately in 1000 Monte Carlo simulations, while the proposed SR-SHARKF can effectively prevent the divergence and the RMSE remains relatively stable and lower, indicating that the performance of SR-SHARKF outperforms KF, SHAKF, and MSHARKF. As shown in
Figure 10a–d and the ASTD of
Table 5, we can see that the dispersion of the estimates of position, velocity, and acceleration for all algorithms increases with time since the changes in position, velocity, and acceleration become larger after the amount that can be changed becomes larger. The dispersions estimated by all algorithms are similar.
The ARMSE values were evaluated for all algorithms in both directions and are given in
Table 5. We can see from these tables that the SR-SHARKF algorithm gives more competitive results than the KF, SHAKF, and MSHARKF algorithms.
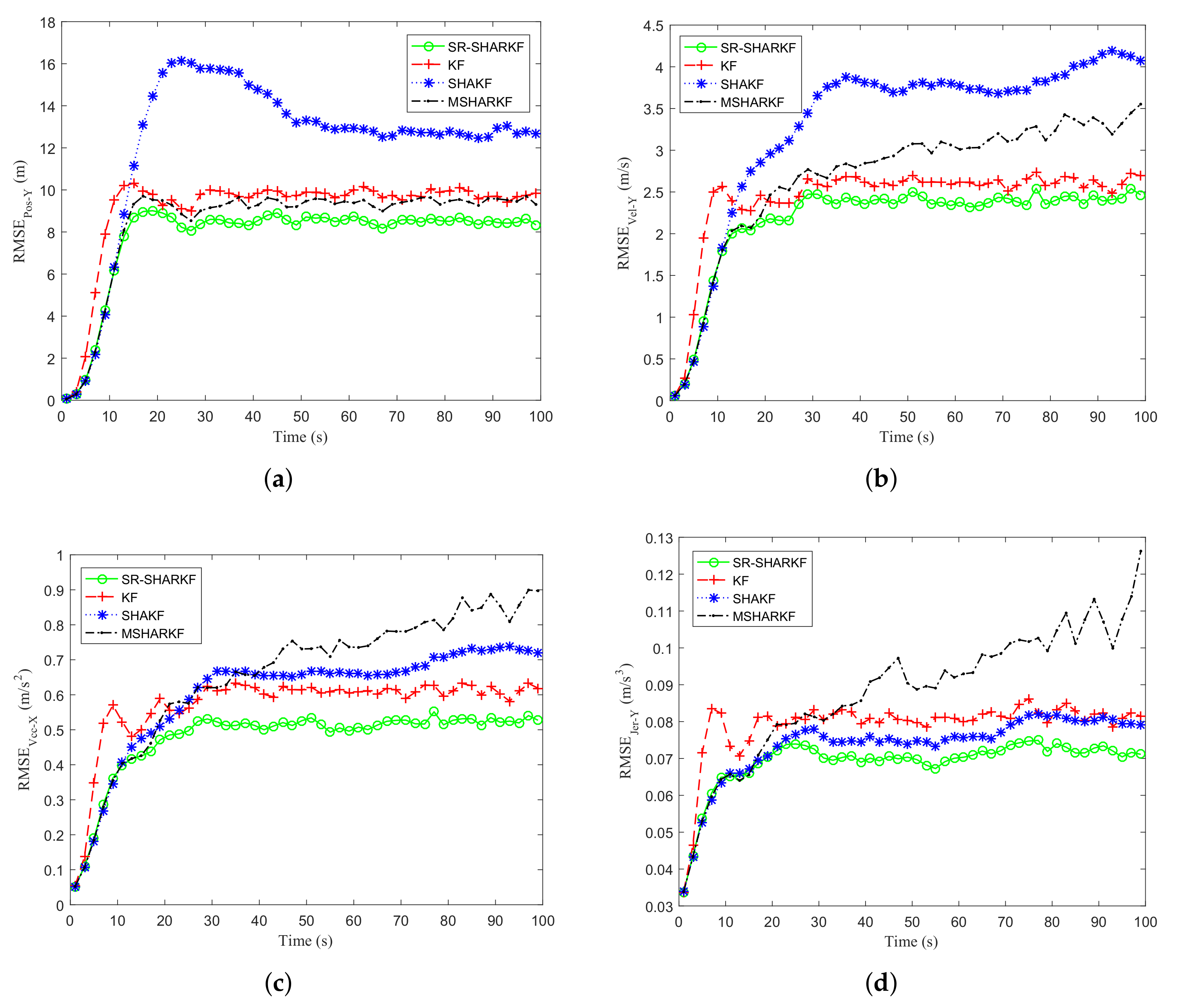
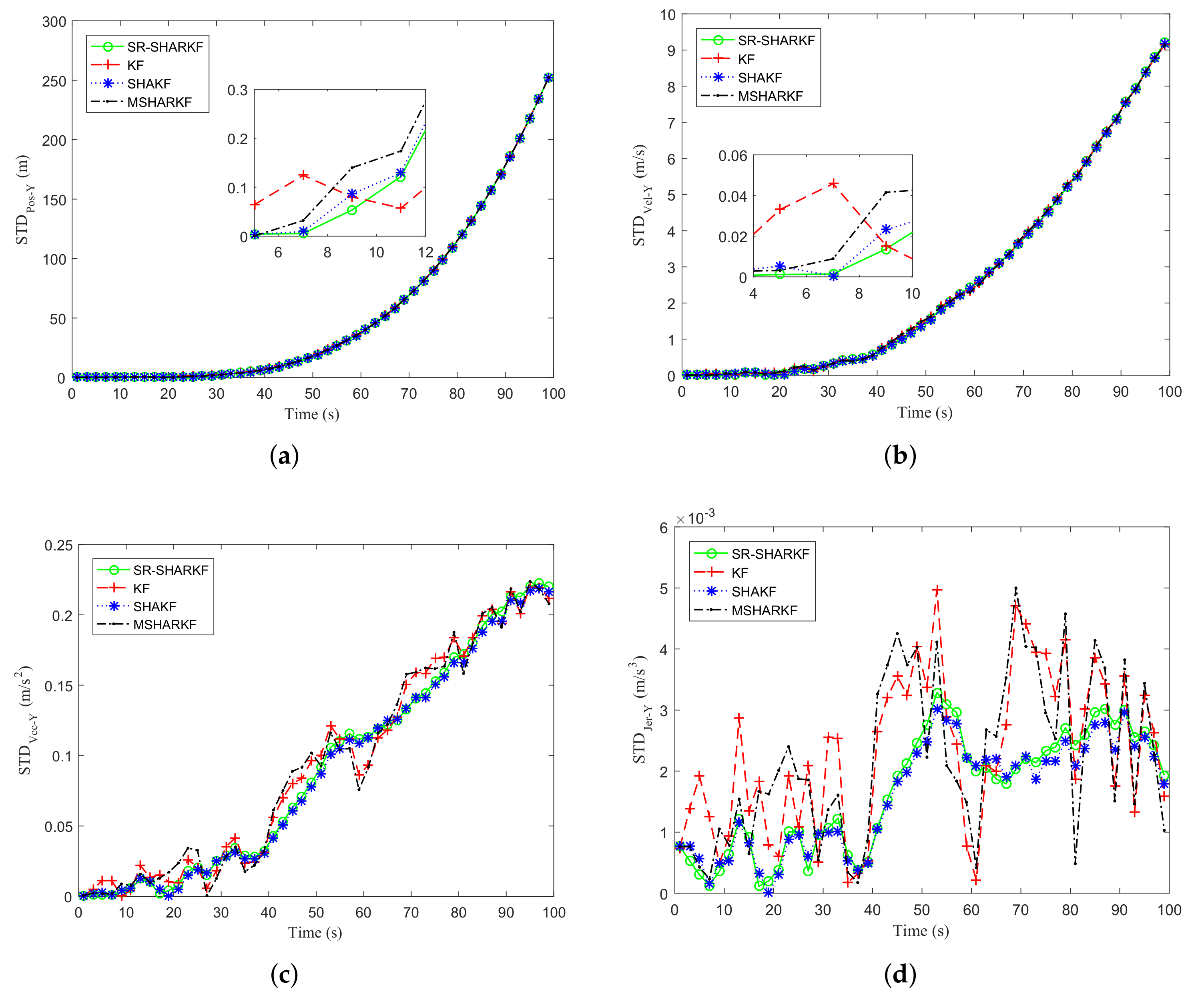
In the Y-direction, we may obtain similar results as in the X-direction by
Figure 11a–d and
Figure 12a–d and
Table 6. It is further verified that the proposed algorithm has better performance compared to other existing algorithms.





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}