
An Accurate and Robust Method for Absolute Pose Estimation with UAV Using RANSAC


Abstract
:1. Introduction
2. Problem and Method Statement with UAV Using RANSAC
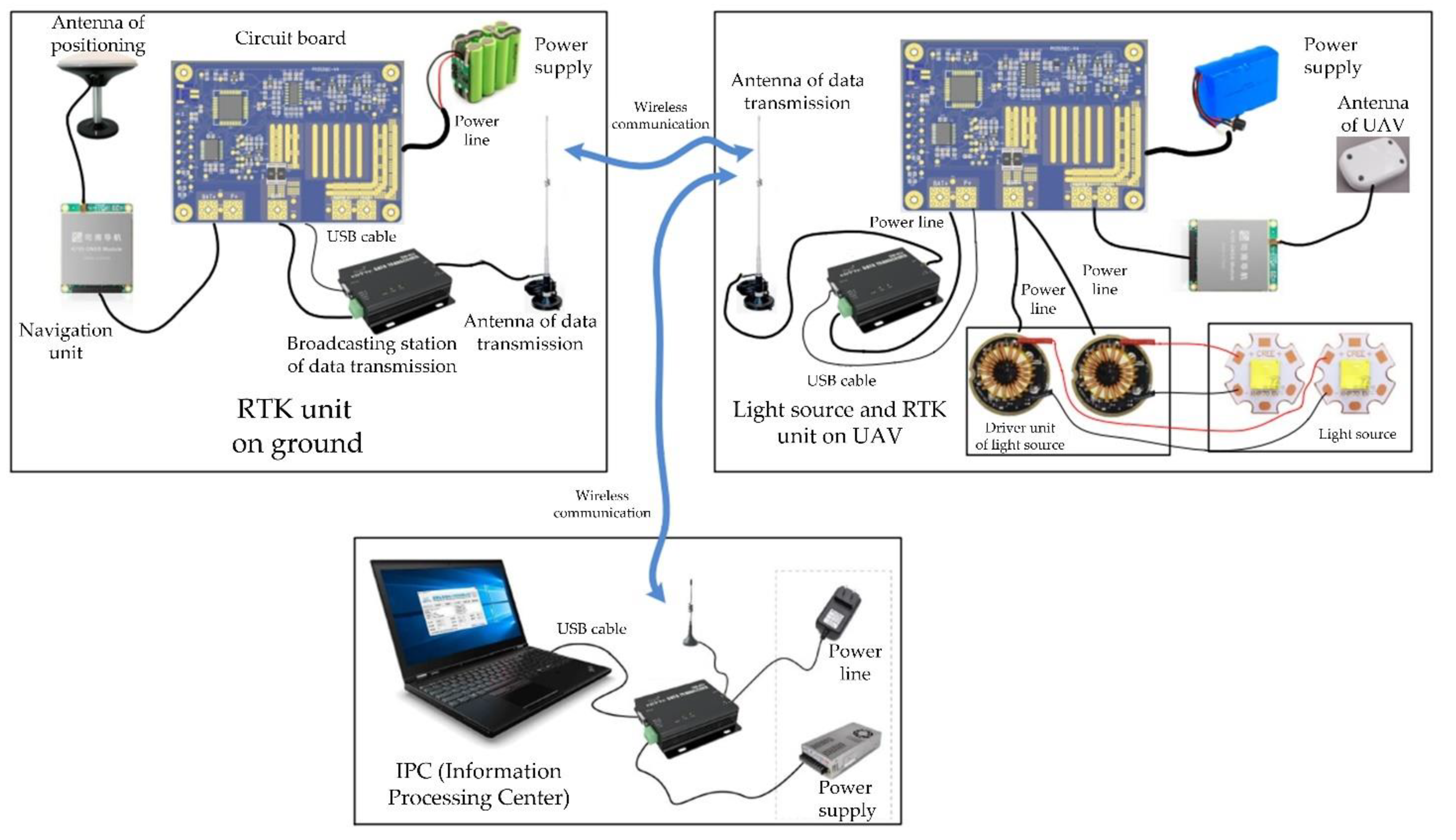
2.1. Design of UAV for Point Correspondence
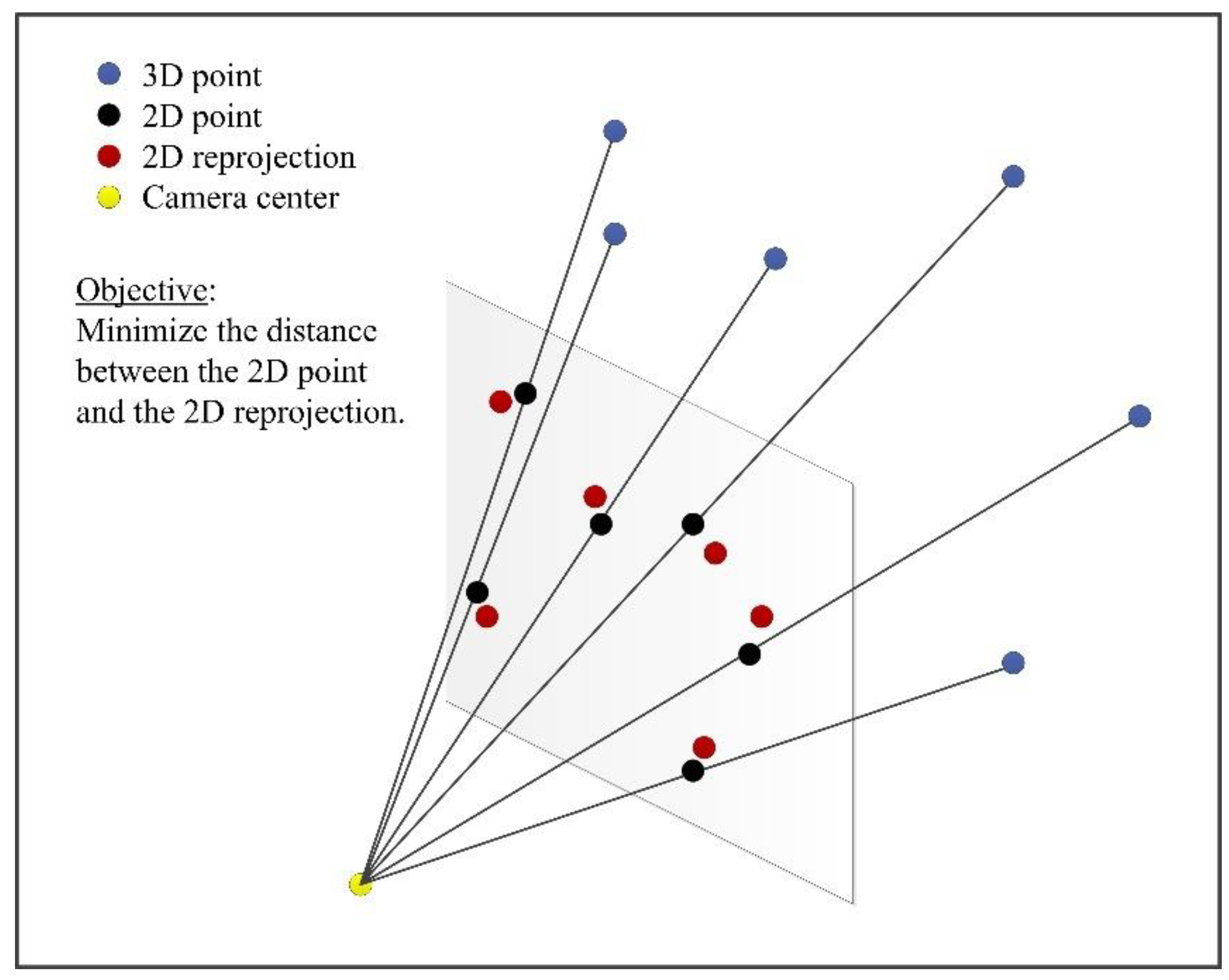
2.2. Pose Estimation
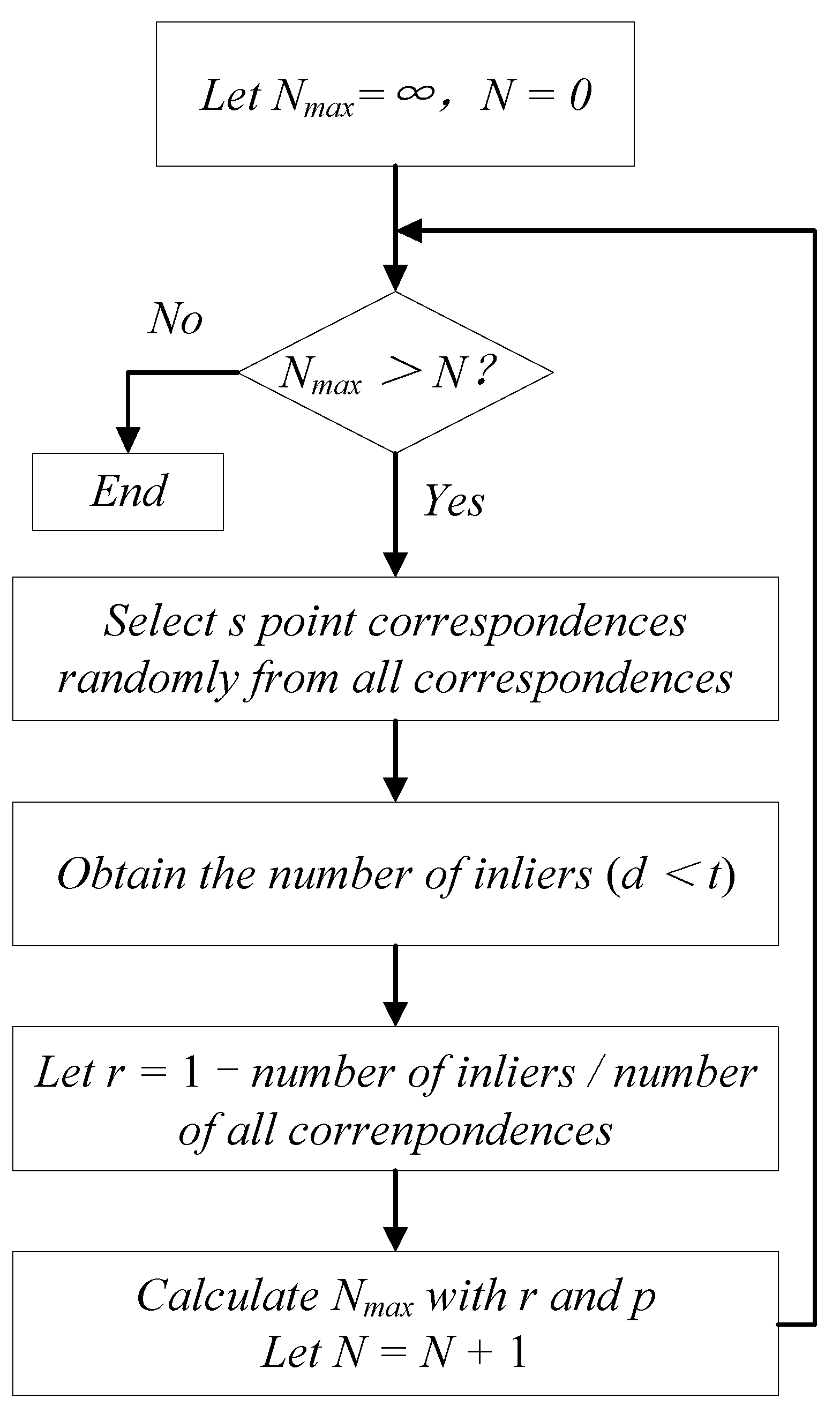
2.2.1. Pose Estimation with UAV Using RANSAC
2.2.2. Normalization for Inliers
2.2.3. Absolute Pose Estimation and Refining
3. Experiments and Results
3.1. Synthetic Data
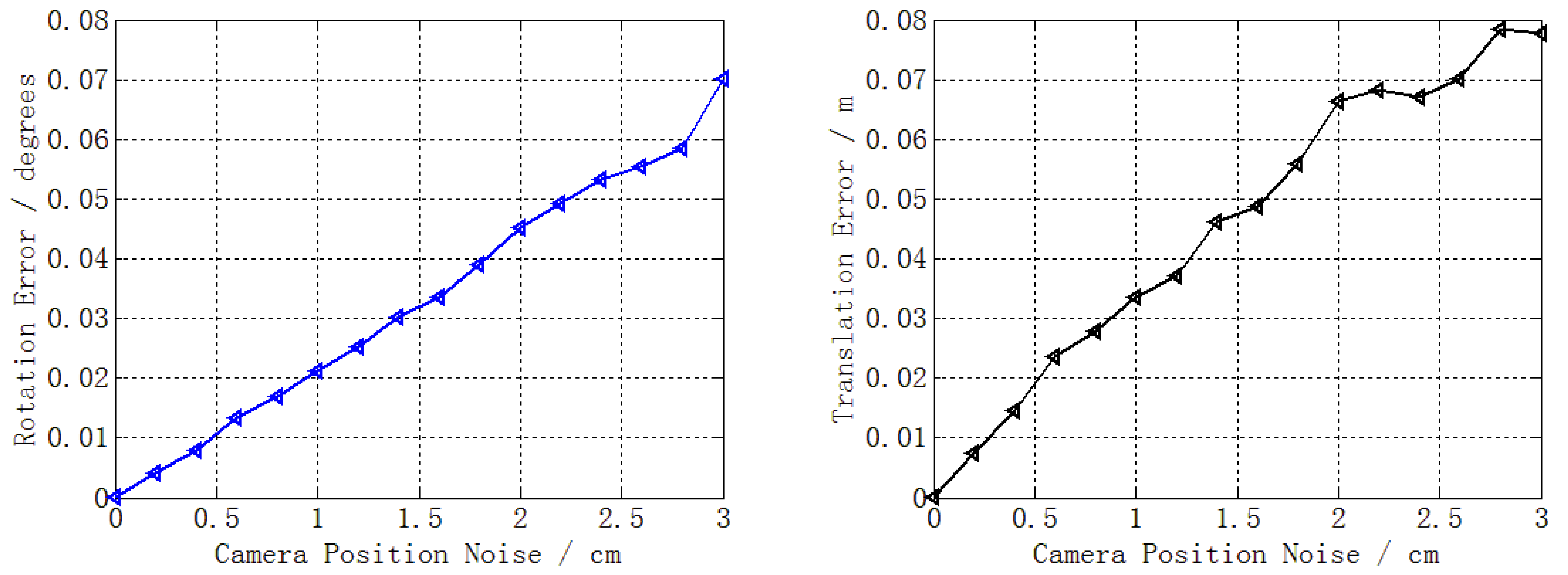
3.1.1. Robustness to Camera Position Noise
3.1.2. Numerical Stability
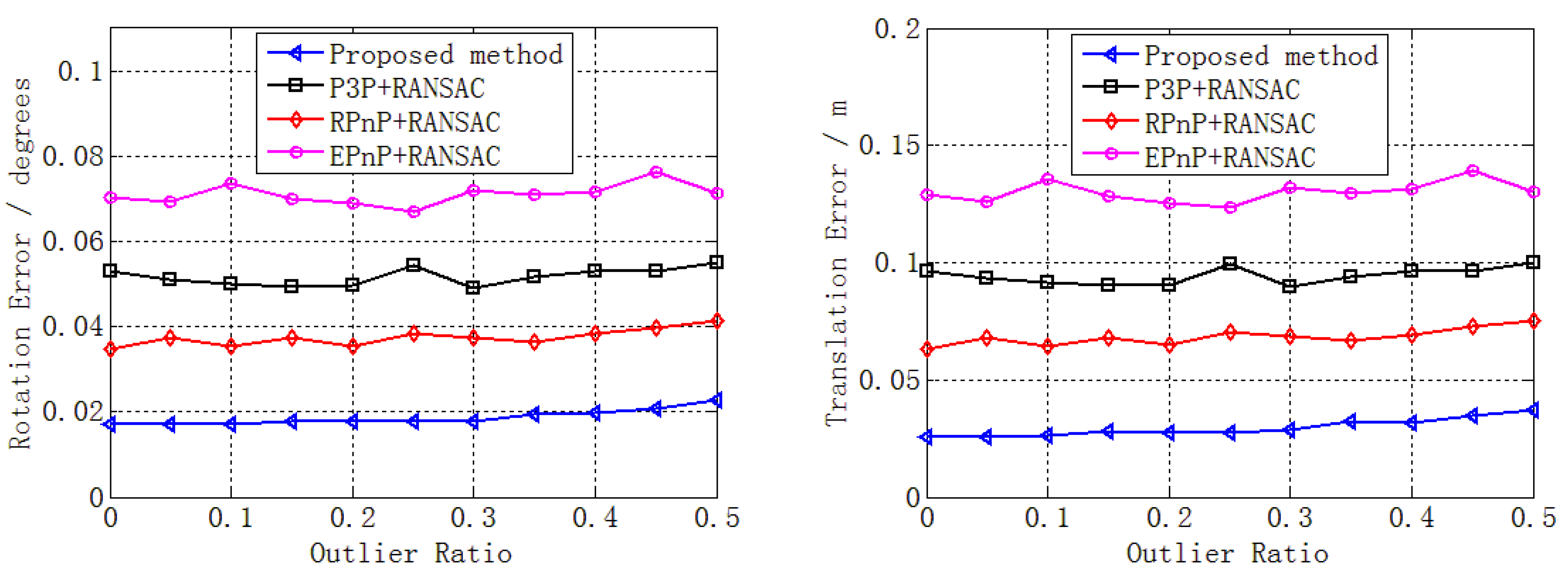
3.1.3. Performance Analysis of Outlier Ratio
3.1.4. Noise Sensitivity
3.1.5. Computational Speed
3.2. Real Images
4. Discussion
4.1. Differences and Advantages
4.2. Future Work
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Vongkulbhisal, J.; De la Torre, F.; Costeira, J.P. Discriminative optimization: Theory and applications to computer vision. IEEE Trans. Pattern Anal. Mach. Intell. 2018, 41, 829–843. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zhou, F.; Cui, Y.; Wang, Y.; Liu, L.; Gao, H. Accurate and robust estimation of camera parameters using RANSAC. Opt. Lasers Eng. 2013, 51, 197–212. [Google Scholar]
- Lourakis, M.; Terzakis, G. A globally optimal method for the PnP problem with MRP rotation parameterization. In Proceedings of the International Conference on Pattern Recognition, Milano, Italy, 10–15 January 2021; pp. 3058–3063. [Google Scholar]
- Hartley, R.; Zisserman, A. Multiple View Geometry in Computer Vision, 2nd ed.; Cambridge University Press: Cambridge, UK, 2003. [Google Scholar]
- Brachmann, E.; Krull, A.; Nowozin, S.; Shotton, J.; Michel, F.; Gumhold, S.; Rother, C. Dsac-differentiable ransac for camera localization. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 6684–6692. [Google Scholar]
- Guan, B.; Zhao, J.; Li, Z.; Sun, F.; Fraundorfer, F. Minimal solutions for relative pose with a single affine correspondence. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Seattle, WA, USA, 13–19 June 2020; pp. 1929–1938. [Google Scholar]
- Zhou, L.; Ye, J.; Kaess, M. A stable algebraic camera pose estimation for minimal configurations of 2D/3D point and line correspondences. In Proceedings of the Asian Conference on Computer Vision, Perth, Australia, 2–6 December 2018; pp. 273–288. [Google Scholar]
- Zheng, Y.; Sugimoto, S.; Sato, I.; Okutomi, M. A general and simple method for camera pose and focal length determination. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Columbus, OH, USA, 23–28 June 2014; pp. 430–437. [Google Scholar]
- Gao, X.S.; Hou, X.R.; Tang, J.; Cheng, H.F. Complete solution classification for the perspective-three-point problem. IEEE Trans. Pattern Anal. Mach. Intell. 2003, 25, 930–943. [Google Scholar]
- Lacey, A.J.; Pinitkarn, N.; Thacker, N.A. An Evaluation of the Performance of RANSAC Algorithms for Stereo Camera Calibrarion. In Proceedings of the Eleventh British Machine Vision Conference, University of Bristol, Bristol, UK, 11–14 September 2000; pp. 1–10. [Google Scholar]
- Heikkila, J. Geometric camera calibration using circular control points. IEEE Trans. Pattern Anal. Mach. Intell. 2000, 22, 1066–1077. [Google Scholar] [CrossRef] [Green Version]
- Gong, X.; Lv, Y.; Xu, X.; Wang, Y.; Li, M. Pose Estimation of Omnidirectional Camera with Improved EPnP Algorithm. Sensors 2021, 21, 4008. [Google Scholar] [PubMed]
- Hu, Y.; Fua, P.; Wang, W.; Salzmann, M. Single-stage 6d object pose estimation. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Seattle, WA, USA, 13–19 June 2020; pp. 2930–2939. [Google Scholar]
- Guo, K.; Ye, H.; Chen, H.; Gao, X. A New Method for Absolute Pose Estimation with Unknown Focal Length and Radial Distortion. Sensors 2022, 22, 1841. [Google Scholar] [CrossRef]
- Hadfield, S.; Lebeda, K.; Bowden, R. HARD-PnP: PnP optimization using a hybrid approximate representation. IEEE Trans. Pattern Anal. Mach. Intell. 2018, 41, 768–774. [Google Scholar]
- Zheng, Y.; Kuang, Y.; Sugimoto, S.; Astrom, K.; Okutomi, M. Revisiting the pnp problem: A fast, general and optimal solution. In Proceedings of the IEEE International Conference on Computer Vision, Sydney, Australia, 1–8 December 2013; pp. 2344–2351. [Google Scholar]
- Wu, Y.; Hu, Z. PnP problem revisited. J. Math. Imaging Vis. 2006, 24, 131–141. [Google Scholar] [CrossRef]
- Kneip, L.; Scaramuzza, D.; Siegwart, R. A novel parametrization of the perspective-three-point problem for a direct computation of absolute camera position and orientation. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Colorado Springs, CO, USA, 20–25 June 2011; pp. 2969–2976. [Google Scholar]
- Wolfe, W.J.; Mathis, D.; Sklair, C.W.; Magee, M. The perspective view of three points. IEEE Comput. Archit. Lett. 1991, 13, 66–73. [Google Scholar]
- Kanaeva, E.; Gurevich, L.; Vakhitov, A. Camera pose and focal length estimation using regularized distance constraints. In Proceedings of the British Machine Vision Conference, Swansea, UK, 7–10 September 2015; p. 162. [Google Scholar]
- Yin, X.; Ma, L.; Tan, X.; Qin, D. A Robust Visual Localization Method with Unknown Focal Length Camera. IEEE Access 2021, 9, 42896–42906. [Google Scholar]
- Penate-Sanchez, A.; Andrade-Cetto, J.; Moreno-Noguer, F. Exhaustive linearization for robust camera pose and focal length estimation. IEEE Trans. Pattern Anal. Mach. Intell. 2013, 35, 2387–2400. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Nakano, G. A versatile approach for solving PnP, PnPf, and PnPfr problems. In Proceedings of the European Conference on Computer Vision, Amsterdam, The Netherlands, 8–16 October 2016; pp. 338–352. [Google Scholar]
- Josephson, K.; Byrod, M. Pose estimation with radial distortion and unknown focal length. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Miami Beach, FL, USA, 20–25 June 2009; pp. 2419–2426. [Google Scholar]
- Kukelova, Z.; Bujnak, M.; Pajdla, T. Real-time solution to the absolute pose problem with unknown radial distortion and focal length. In Proceedings of the IEEE International Conference on Computer Vision, Sydney, Australia, 1–8 December 2013; pp. 2816–2823. [Google Scholar]
- Triggs, B. Camera pose and calibration from 4 or 5 known 3d points. In Proceedings of the Seventh IEEE International Conference on Computer Vision, Corfu, Greece, 20–25 September 1999; Volume 1, pp. 278–284. [Google Scholar]
- Wu, Y.; Li, Y.; Hu, Z. Detecting and handling unreliable points for camera parameter estimation. Int. J. Comput. Vis. 2008, 79, 209–223. [Google Scholar] [CrossRef]
- Zhao, Z.; Ye, D.; Zhang, X.; Chen, G.; Zhang, B. Improved direct linear transformation for parameter decoupling in camera calibration. Algorithms 2016, 9, 31. [Google Scholar] [CrossRef] [Green Version]
- Barone, F.; Marrazzo, M.; Oton, C.J. Camera calibration with weighted direct linear transformation and anisotropic uncertainties of image control points. Sensors 2020, 20, 1175. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Kukelova, Z.; Bujnak, M.; Pajdla, T. Closed-form solutions to minimal absolute pose problems with known vertical direction. In Proceedings of the Asian Conference on Computer Vision, Queenstown, New Zealand, 8–9 November 2010; pp. 216–229. [Google Scholar]
- Sweeney, C.; Flynn, J.; Nuernberger, B.; Turk, M.; Höllerer, T. Efficient computation of absolute pose for gravity-aware augmented reality. In Proceedings of the IEEE International Symposium on Mixed and Augmented Reality, Fukuoka, Japan, 29 September–3 October 2015; pp. 19–24. [Google Scholar]
- Bujnák, M. Algebraic Solutions to Absolute Pose Problems. Ph.D. Thesis, Czech Technical University, Prague, Czech Republic, 2012. [Google Scholar]
- D’Alfonso, L.; Garone, E.; Muraca, P.; Pugliese, P. On the use of IMUs in the PnP Problem. In Proceedings of the International Conference on Robotics and Automation, Hong Kong, China, 31 May–5 June 2014; pp. 914–919. [Google Scholar]
- Kalantari, M.; Hashemi, A.; Jung, F.; Guédon, J.P. A new solution to the relative orientation problem using only 3 points and the vertical direction. J. Math. Imaging Vis. 2011, 39, 259–268. [Google Scholar] [CrossRef] [Green Version]
- Guo, K.; Ye, H.; Zhao, Z.; Gu, J. An efficient closed form solution to the absolute orientation problem for camera with unknown focal length. Sensors 2021, 21, 6480. [Google Scholar] [CrossRef]
- Derpanis, K.G. Overview of the RANSAC Algorithm. Image Rochester NY 2010, 4, 2–3. [Google Scholar]
- Fischler, M.A.; Bolles, R.C. Random sample consensus: A paradigm for model fitting with applications to image analysis and automated cartography. Commun. ACM 1981, 24, 381–395. [Google Scholar] [CrossRef]
- Botterill, T.; Mills, S.; Green, R. Fast RANSAC hypothesis generation for essential matrix estimation. In Proceedings of the International Conference on Digital Image Computing: Techniques and Applications, Noosa, QLD, Australia, 6–8 December 2011; pp. 561–566. [Google Scholar]
- Ferraz, L.; Binefa, X.; Moreno-Noguer, F. Very fast solution to the PnP problem with algebraic outlier rejection. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Columbus, OH, USA, 23–28 June 2014; pp. 501–508. [Google Scholar]
- Zakharov, S.; Shugurov, I.; Ilic, S. Dpod: 6d pose object detector and refiner. In Proceedings of the IEEE/CVF International Conference on Computer Vision, Seoul, Korea, 27 October–2 November 2019; pp. 1941–1950. [Google Scholar]
- Li, S.; Xu, C.; Xie, M. A robust O (n) solution to the perspective-n-point problem. IEEE Trans. Pattern Anal. Mach. Intell. 2012, 34, 1444–1450. [Google Scholar] [CrossRef]
- Lepetit, V.; Moreno-Noguer, F.; Fua, P. Epnp: An accurate o (n) solution to the pnp problem. Int. J. Comput. Vis. 2009, 81, 155–166. [Google Scholar] [CrossRef] [Green Version]
- Ding, Y.; Yang, J.; Ponce, J.; Kong, H. Minimal solutions to relative pose estimation from two views sharing a common direction with unknown focal length. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Seattle, WA, USA, 13–19 June 2020; pp. 7045–7053. [Google Scholar]
- Liu, L.; Li, H.; Dai, Y. Efficient global 2d-3d matching for camera localization in a large-scale 3d map. In Proceedings of the IEEE International Conference on Computer Vision, Venice, Italy, 22–29 October 2017; pp. 2372–2381. [Google Scholar]
- Germain, H.; Bourmaud, G.; Lepetit, V. Sparse-to-dense hypercolumn matching for long-term visual localization. In Proceedings of the International Conference on 3D Vision, Québec City, QC, Canada, 16–19 September 2019; pp. 513–523. [Google Scholar]
- Jiang, Y.; Xu, Y.; Liu, Y. Performance evaluation of feature detection and matching in stereo visual odometry. Neurocomputing 2013, 120, 380–390. [Google Scholar] [CrossRef]
- Dang, Z.; Yi, K.M.; Hu, Y.; Wang, F.; Fua, P.; Salzmann, M. Eigendecomposition-free training of deep networks with zero eigenvalue-based losses. In Proceedings of the European Conference on Computer Vision, Munich, Germany, 8–14 September 2018; pp. 768–783. [Google Scholar]
- Botterill, T.; Mills, S.; Green, R. Refining essential matrix estimates from RANSAC. In Proceedings of the Image and Vision Computing New Zealand, Auckland, New Zealand, 29 November–1 December 2011; pp. 1–6. [Google Scholar]
- Torr, P.H.; Murray, D.W. The development and comparison of robust methods for estimating the fundamental matrix. Int. J. Comput. Vis. 1997, 24, 271–300. [Google Scholar] [CrossRef]
- Guo, K.; Ye, H.; Gu, J.; Chen, H. A novel method for intrinsic and extrinsic parameters estimation by solving perspective-three-point problem with known camera position. Appl. Sci. 2021, 11, 6014. [Google Scholar] [CrossRef]
- Forlani, G.; Dall’Asta, E.; Diotri, F.; Cella, U.M.D.; Roncella, R.; Santise, M. Quality assessment of DSMs produced from UAV flights georeferenced with on-board RTK positioning. Remote Sens. 2018, 10, 311. [Google Scholar] [CrossRef] [Green Version]
- Lazaros, N.; Sirakoulis, G.C.; Gasteratos, A. Review of stereo vision algorithms: From software to hardware. Int. J. Optomechatronics 2008, 2, 435–462. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | Proposed Method | P3P + RANSAC | EPnP + RANSAC | RPnP + RANSAC |
|---|---|---|---|---|
| Position relative error | 0.08% | 0.14% | 0.19% | 0.13% |
| Reprojection error/pixel | 0.28 | 0.49 | 0.61 | 0.46 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Guo, K.; Ye, H.; Gao, X.; Chen, H. An Accurate and Robust Method for Absolute Pose Estimation with UAV Using RANSAC. Sensors 2022, 22, 5925. https://doi.org/10.3390/s22155925
Guo K, Ye H, Gao X, Chen H. An Accurate and Robust Method for Absolute Pose Estimation with UAV Using RANSAC. Sensors. 2022; 22(15):5925. https://doi.org/10.3390/s22155925
Chicago/Turabian StyleGuo, Kai, Hu Ye, Xin Gao, and Honglin Chen. 2022. "An Accurate and Robust Method for Absolute Pose Estimation with UAV Using RANSAC" Sensors 22, no. 15: 5925. https://doi.org/10.3390/s22155925
APA StyleGuo, K., Ye, H., Gao, X., & Chen, H. (2022). An Accurate and Robust Method for Absolute Pose Estimation with UAV Using RANSAC. Sensors, 22(15), 5925. https://doi.org/10.3390/s22155925