1. Introduction
In the face of global climate change, monitoring the health and degradations of ecosystems is becoming of crucial importance to understand phenomena, anticipate changes and engage appropriate actions [
1]. A first approach consists of analyzing high-resolution satellite images to measure visible evolutions of some phenomena at a large scale (e.g., melting of mountain glaciers [
2], reduction of surface waters [
3], changes in land use and land cover [
4]). A second one consists of deploying sensor nodes directly in the environment, with the aim to perform precise measurements on specific points and obtain information which is impossible to access from an aerial system.
The data collection of sensor nodes installed in wide and isolated areas (e.g., natural zones, mountainous regions, agricultural lands) may be a challenging task. In fact, the communication links between the sensor nodes and the closest gateway can not be always possible, for example due to devices out of range, perturbations or problems of network coverage. The telephony base stations (GSM) can moreover be inaccessible. In addition, a strong constraint to be considered is the minimization of the energy consumption of the nodes. The objective is in fact generally to position the nodes for ideally several years without battery replacement, that requires to limit as much as possible the energy spent to communicate. Finally, although rarely aborded in the literature, the protection of the sensor nodes against potential damages (e.g., animals, climatic events, vandalism, passage of vehicles) is also to be considered with attention.
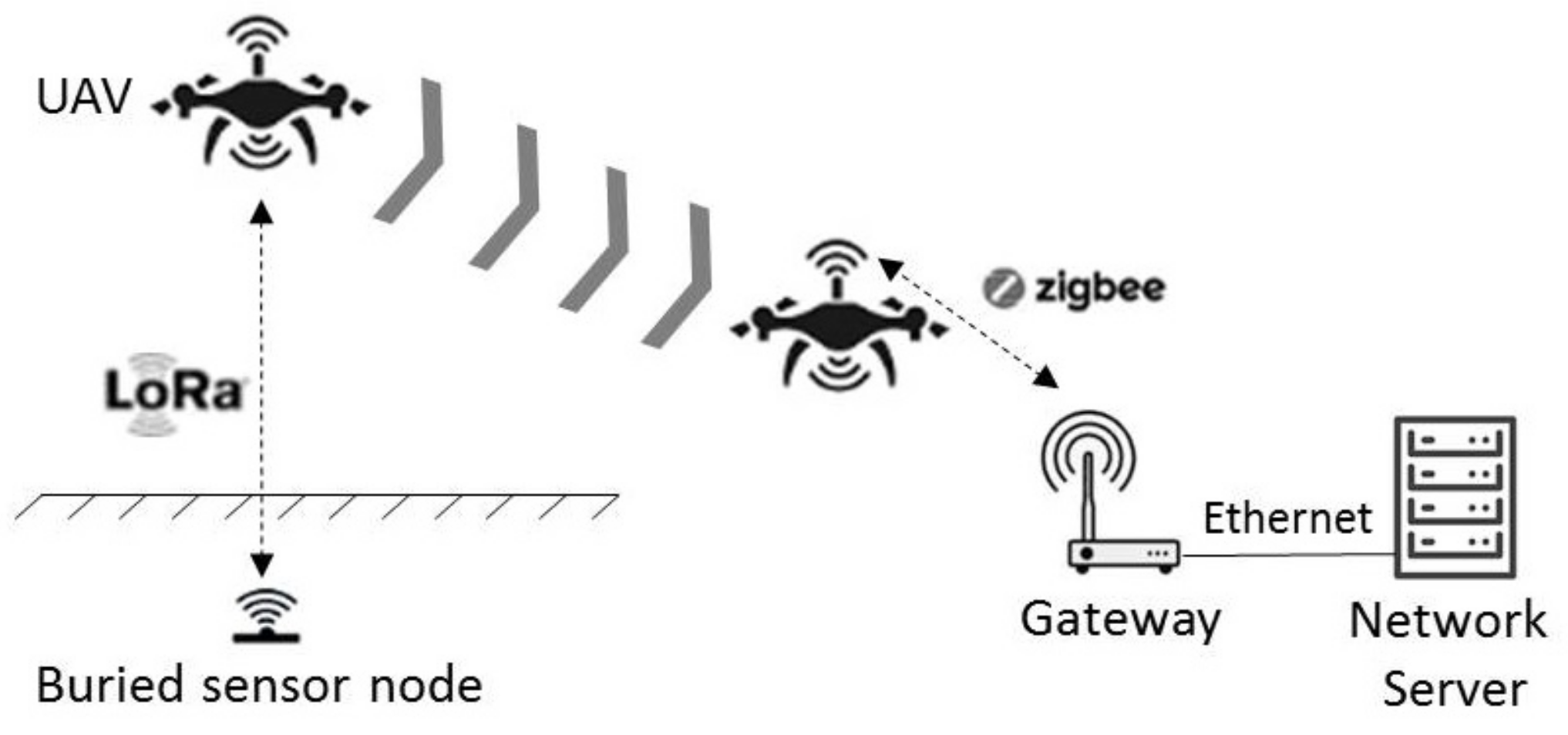
To meet these different expectations, we propose in this paper to combine the recent advances offered by the Wireless Underground Sensor Networks (WUSNs) with the potential provided by the Unmanned Aerial Vehicles (UAVs), see the illustration in
Figure 1. In this scheme, each sensor node, composed of the sensor, the battery, the electronic components, the radio module, and the antenna, is fully buried at a few dozen of centimeters deep. That enables them to protect themselves against numerous external damages and does not impact the aboveground activities. The UAV is used for its part as a data collector and acts as an interface between the sensor nodes and the remote gateway. By coming close to each sensor node, the UAV enables moreover to limit the transmit power of the radio modules and, therefore, the energy consumption of the nodes. During the flight, the collected data frames are first memorized on the UAV. They are next unloaded on the gateway at the end of the mission. In the case of numerous sensor nodes to be visited, the trajectory of the UAV can be advantageously optimized to minimize its flight time.
Research on buried sensor nodes is relatively recent and has rapidly led to the concepts of Wireless Underground Sensor Networks (WUSNs) and the Internet of Underground Things (IoUT) [
5,
6,
7,
8]. Typical targeted applications are smart irrigation, detection of pollution near rivers, and detection of landslides [
9,
10,
11]. This new paradigm is, however, strongly constrained by the fact that the radio electromagnetic signals are highly attenuated in the soil, about 20–300 times worse than in the air [
12]. The propagation distance of the signals is therefore highly reduced underground. The problem is that the attenuation of the radio signals through the soil is dependent on numerous factors as the soil properties (volumetric water content, percentages of sand, silt, and clay, bulk density, temperature) and depends on the configuration of the node (e.g., burial depth, operating frequency, transmit power, antenna orientation) [
13,
14,
15]. Typically, a wet soil (dependent on weather, topography, and environment) highly attenuates the radio signal (e.g., about +20 dB compared to dry soil [
16]), as well as high temperature, clay soil, and high bulk density. The soil parameters are unfortunately spatially heterogeneous, and the volumetric water content (VWC) highly variable. The VWC also impacts the antenna radiation pattern [
12], and the antenna orientation has to be carefully considered (0 to 100% packet error rate) [
16]. As a result, the Underground to Underground (UG2UG) communication link between two buried sensor nodes remains difficult to establish and reaches only a few meters in favorable conditions [
16]. However, while the development of a WUSN based on multi-hop operations seems difficult to achieve, our last work [
17] highlighted that the Underground to Aboveground (UG2AG) communication link can reach more than 275 m under certain conditions (868-MHz radio modules with the technology LoRa [
18], transmit power of +14 dBm/25 mW, 15 cm burial depth, aboveground receiving antenna at 2 m height). Similarly, [
19] presented successful UG2AG transmissions in LoRaWAN [
20] for sensor nodes buried from 10 cm to 50 cm at a distance of 27 m.
Meanwhile, recent advances in UAVs have led to a progressive increase in their autonomy, payload, and maneuverability. That has enabled us to open a large panel of new applications [
21,
22]. In particular, UAVs are becoming more and more integrated aboveground. Wireless Sensor Networks (WSNs) to improve connectivity, coverage, and quality of service [
23], with the aim to use them as high-altitude aerial base stations, communication relays, or data collectors [
24,
25,
26,
27,
28,
29,
30]. The problem of data collection from a UAV is mainly addressed in the literature in terms of optimal trajectory planning, but also flight time minimization or methods to wake up the nodes. For example, Ref. [
31] studied the generation of an optimal trajectory for a UAV passing near several IoT nodes rested on the floor. An interesting approach is proposed to gather some nodes with respect to the strength of the Received Signal Strength Indication (RSSI) levels and thus reduce the number of transmissions. Similarly, Ref. [
32] formulated the problem of flight time minimization for a UAV having to collect data of aboveground nodes linearly distributed. The speed of the UAV, which is another essential parameter to be considered in the trajectory planning issue, is adapted with respect to the transmit power of the nodes and the number of data to be collected. The wake-up problem of sensor nodes from a UAV is addressed by [
33]. Different devices based on either infrared or radio frequency signals were experimented. Unfortunately, tests were performed only with aboveground components. Results showed the possibility of waking-up some nodes with a delay lower than 80 ms on the condition to have a distance lower than 5 m between the UAV and the node.
Likewise, UAVs could be advantageously used to collect the data of sensor nodes buried in the natural environment. That approach can avoid the installation of numerous and costly gateways and offer the possibility to rapidly and safely cover wide areas (obviously, in the distance and altitude limits allowed by the applicable regulations). However, to the best of our knowledge, the data collection of buried sensor nodes by a UAV has not yet been experimentally investigated in the literature. Only simulation results are presented in [
34] where the impacts of different parameters (e.g., UAV altitude, flight time, soil moisture, burial depth) are studied. In this work, 2000 nodes are assumed to be buried and distributed within a field of 20 hectares to collect the data from a stationary UAV using the NB-IoT technology. In addition to the work considering aboveground nodes, particular constraints have to be taken into account for underground systems, such as varying communication ranges, node priorities, and time windows to limit the energy consumption. That requires investigating particular optimization algorithms.
The objective of the study reported in this paper was to experimentally demonstrate the feasibility of retrieving data of buried sensor nodes using a UAV based on LoRa communication. The impact of the UAV’s position and altitude on the strength of the RSSI signals with respect to the position of the sensor node is highlighted from several experimentations. In addition, tests at different speeds are reported highlighting the possibility to collect the data dynamically. In case of several buried sensor nodes, the flight planification issue of the UAV is addressed through evolutionary algorithms. This paper is organized as follows. The materials and methods are presented in
Section 2. The experimental setup and results are reported in
Section 3. Obtained results are discussed in
Section 4. Conclusions and future work are presented respectively in
Section 5 and
Section 6.
2. Materials and Methods
We consider several buried sensor nodes distributed within a wide area. The nearest gateway is assumed to be out of the coverage range of the nodes, leading to no possibility of direct connection to the Internet as it is usually the case in conventional Low Power Wide Area Networks (LPWAN). The network coverage by GSM or WiFi is assumed unavailable. That leads to discarding the solution of embedding a gateway directly on the UAV as there is no possibility of having a continuous connection with the server to transfer the data during the flight. The sensor nodes are buried at a few dozens of centimeters deep. They periodically perform soil parameter measurements which are stored in their internal memories. The challenge consists of retrieving these data while limiting the energy consumption of the nodes.
The scenario considered is based on a UAV used as a data collector, i.e., embedding an electronic device with communication capabilities with both the sensor nodes and a ground gateway as well as with data collecting and recording capabilities. The UAV flies over the buried sensor nodes following a previously defined flight plan in terms of waypoints, speed, and altitude. The data are first transferred and stored in the internal memory of the collector node embedded on the UAV, to be next, at the end of the mission, sent to the gateway connected to the network server, see the principle scheme in
Figure 2. The advantage of such an approach is to bring flexibility with the possibility to place the nodes indifferently in the environment without the need to form a connected network. That discards the constraints of multihops, high communication ranges, and risks of network failures. In addition, the radio parameters for the LoRa communication (e.g., spreading factor) can be tuned to reduce the energy consumption of the nodes. The time during which the UAV can communicate with the buried sensor node during a flight with a high RSSI signal can also be considered. This time determines the maximal number of data that can be transferred. It depends in particular on the communication range, the altitude, and speed of the UAV.
As presented in
Figure 2, we propose an architecture based on two radio communication links, namely LoRa and ZigBee. We chose to develop the wireless communication UG2AIR (Underground to Air) between the buried sensor nodes and the collector node embedded in the UAV based on the LoRa technology [
18]. This technology offers numerous advantages in the development of WUSNs thanks to its high communication range and its low energy consumption. The quantity of data sent is limited (about 0.29 kbps to 5 kbps) but remains compatible for applications involving low-rate environmental sensors. This technology operates in the ISM frequency band (EU: 868 MHz and 433 MHz, USA: 915 MHz and 433 MHz) and is based on a Chirp Spread Spectrum (CSS) modulation technique that enables to significantly increase both the signal reliability and receiver sensibility while maintaining a low energy consumption. The communication range in LoRa is determined by several configurable parameters such as the bandwidth (BW), the signal output power, and the spreading factor (SF). A high value of SF increases the communication range to the detriment of the data rate, as the signal is transmitted for a longer time, as well as to the detriment of the autonomy as the communication time is longer. The coding rate (CR) is another configurable parameter enabling to apply a set of coding rules on the exchanged signals. A high value of CR offers more protection but increases the time of exchange and decreases the bit rate. In the system developed, following the results of our previous work [
17], we used the 868 MHz frequency band with a transmit power tuned at +14 dBm/25 mW, a bandwidth of 125 KHz, and an SF value tuned to 7.
We chose to base the wireless communication AIR2AIR between the data collector and the gateway on the ZigBee protocol [
35]. This protocol enables the development of networks with low energy consumption, star, mesh, or tree topologies, as well as a 250 kbps data rate. It is defined by the IEEE 802.15.4 standard dedicated to the Low-Rate Wireless Personal Area Networks (LR-WPAN) having short range and low energy consumption. The ZigBee protocol is based on this standard for the physical layer (PHY) and the medium access control (MAC). The network layer (NMK) and the application layer (APL) are defined and maintained by the enterprise organization known as the Connectivity Standards Alliance (CSA), formerly ZigBee Alliance. The ZigBee network has three kinds of modules, namely
End Device which is a terminal node (e.g., sensor, actuator),
Router which routes and transmits the data between the devices and enables one to expand the physical range of a ZigBee network, and
Coordinator which manages the high-level functions of the network as the authentification and security. In a ZigBee network, there is necessarily a coordinator. ZigBee-Pro is a version of ZigBee that benefits from higher capacities as the routing techniques, the network of jumps, the maximal number of peripherals as well as the security of the network. In the system developed, the ZigBee-Pro network between the collector node and the gateway is configured with a star topology, using the ISM frequency band at 2.4 GHz. We defined the collector node as being the
End Device and the gateway as the
Coordinator.
2.1. Materials
We developed all the devices presented in
Figure 2, namely the sensor nodes, the data collector, and the gateway. This subsection presents these devices.
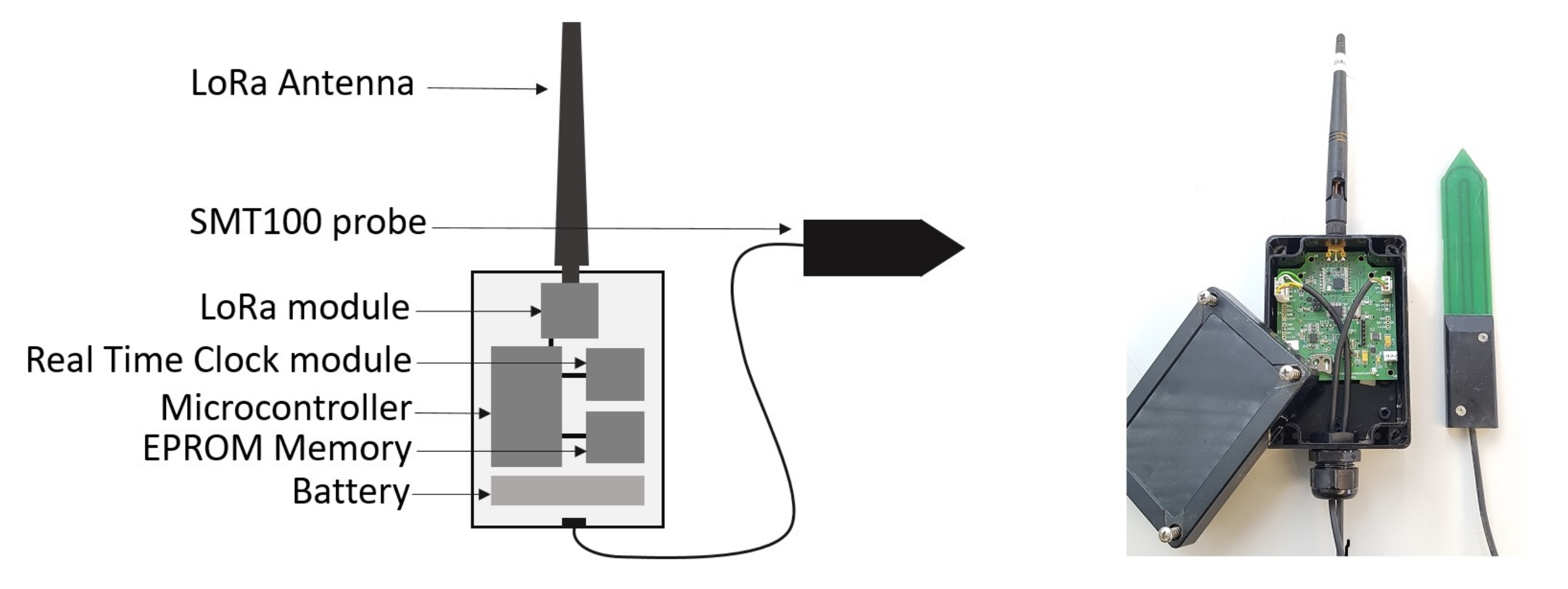
2.1.1. The Buried Sensor Nodes
We developed a set of buried sensor nodes enabling, on the one hand, to periodically take and store measurements of soil parameters and, on the other hand, upload the data frames to the collector node embedded on a UAV when it is in proximity. To that end, the sensor node is managed by a control program running on a microcontroller Atmega328-AU 8 MHz (Microchip), see
Figure 3. The sensor nodes are powered through a rechargeable lithium battery 3.7 V/8.8 Ah with the aim to be autonomous in energy for several months. The sensor nodes are most of the time in deep-sleep mode. They are in active mode only during the measurements and some communication time-windows. A Truebner SMT100 probe is connected to measure the soil moisture and temperature. The measurements are stored on an EEPROM 8 bit memory with I2C-bus interface. The radio communication is based on the LoRa module RFM95W (HopeRF) including the SX1276 chip of Semtech. To determine the timing for the measurement periods and the communication time windows, a temporal reference DS1378 is implemented; see the diagram of the program in
Figure 4. The time-windows enable the sensor node to be ready to communicate with the collector node embedded on the UAV. When a time-window is active, the sensor node puts its radio module in listen mode and waits for a message from the collector node. When the communication is established, the sensor node transfers the data frames to the data collector; see the structure of a data frame in
Table 1.
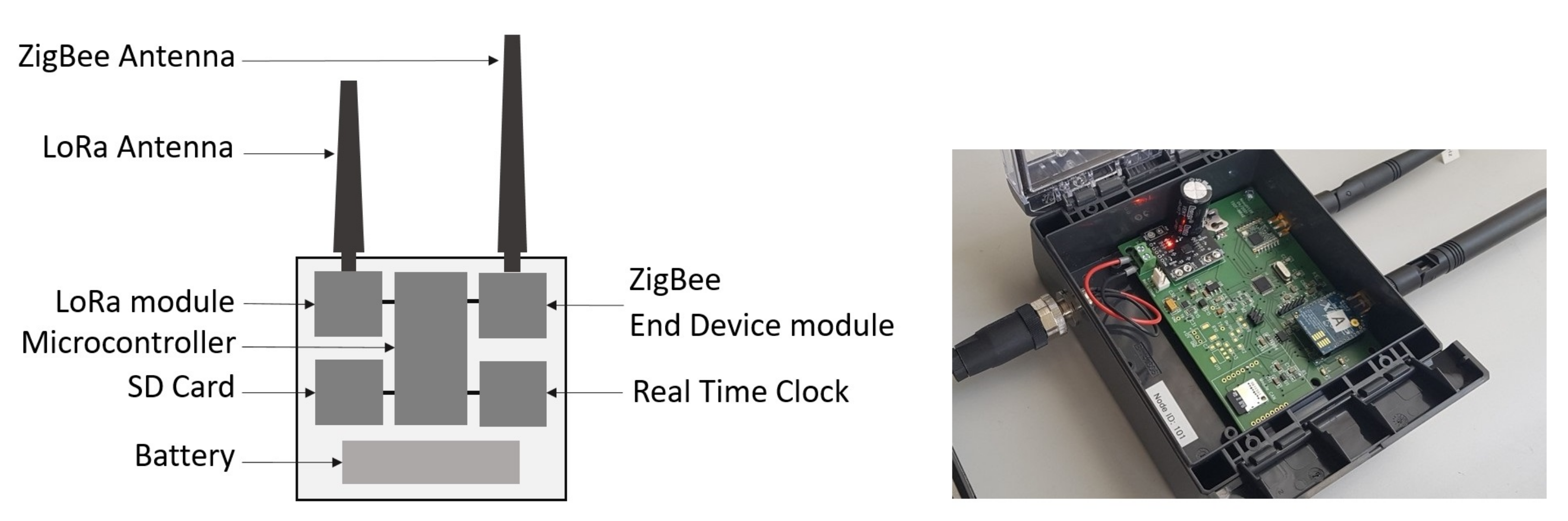
2.1.2. The Data Collector Node and the Gateway
We developed a collector node including two radio modules: the first one is devoted to the communication in LoRa with the buried sensor nodes, and the second one to the communication in ZigBee with the gateway. The collector node has, therefore, two antennas, a LoRa antenna at 868 MHz and a ZigBee antenna at 2.4 GHz, see
Figure 5.
The collector node is built around a microcontroller Atmega328-AU (Microchip) running at 8 MHz. It is equipped with a LoRa radio module RFM95W (HopeRF) enabling to communicate with the buried sensor nodes, and a ZigBee radio module Xbee-PRO (Digi International) to exchange with the server through the gateway. The received data frames are stored in an SD card from an SPI bus. The collector node is powered through a rechargeable lithium battery 3.7 V/8.8 Ah. When accessible, the collector node communicates in Zig-Bee with the remote gateway equipped with a ZigBee module. The collector node is the
End Device and the gateway the
Coordinator. The diagram of the program in the collector node is presented in
Figure 6.
The gateway is based on a Raspberry Pi 4 board with a 64-bit processor and an 8 Go memory, see
Figure 7. It is connected to the network server through an Ethernet link. When the UAV goes back to the base station, the gateway receives and transfers the data frames to the network server. These data are stored on CSV files.
2.1.3. The UAV
The UAV used for the experimentations is presented in
Figure 8. It is a Matrice 300 RTK (DJI). Its main characteristics are a weight with batteries of about 6.3 kg and a payload of 2.7 kg. Its maximal speed is 23 m/s and its autonomy is about 40 min when the payload is used. In France and outside urban areas, this UAV can be used by a professional pilot either by sight at the maximal altitude of 120 m and a lateral distance of 200 m (this scenario was used to qualify the UG2AIR communication link), or without sight at the maximal altitude of 50 m and a lateral distance of 1000 m (this scenario was used to carry out flights in autonomous mode). The maximal altitude and lateral limits can be increased by derogations.
2.2. Methods
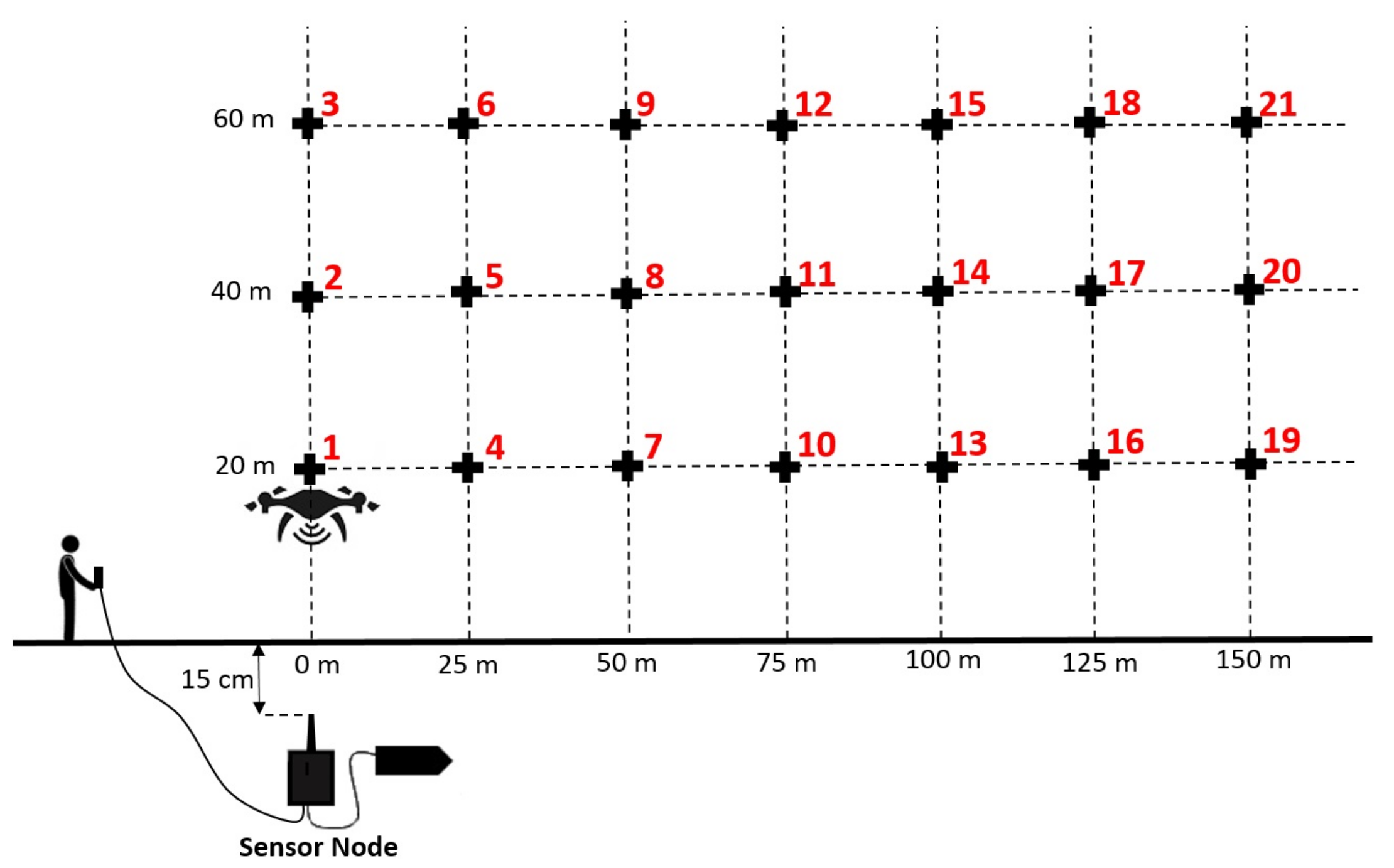
2.2.1. Experimental Setup: Hover Flights
To evaluate the quality of the communication link UG2AIR from a sensor node buried at 15 cm deep to the collector node, it was decided to position the UAV in hovering mode at different altitudes (20 m, 40 m, and 60 m) and lateral distances (from 0 m to 150 m by step of 25 m with respect to the position of the buried node), see the operating mode in
Figure 9. For each position of the UAV, numbered from 1 to 21, the buried sensor node sent 100 data frames (the composition of a data frame is presented in
Table 1). Once the UAV was at its position, a push button connected to the buried sensor node enabled to trigger the transmission of the data frames.
For each measuring point, the UAV was maintained in its position during the time to collect the 100 data frames. The data are received by the collector embedded on the UAV and stored in its internal SD memory card. At each reception of a data frame, the value of the RSSI signal was measured and recorded by the collector node.
2.2.2. Experimental Setup: Dynamic Flights
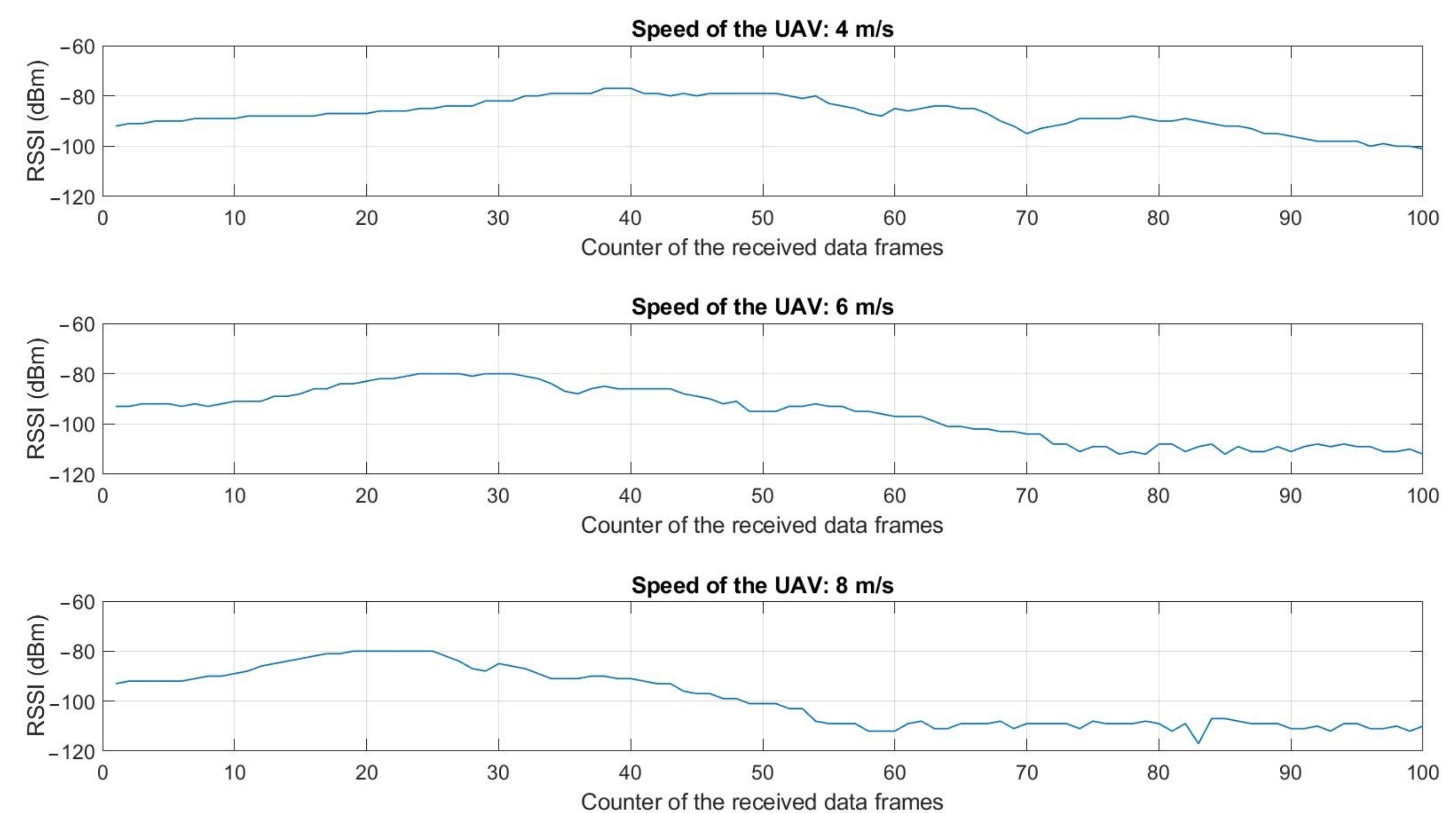
To evaluate the possibility of retrieving the data frames when the UAV is continuously flying, it was first defined that the UAV had to fly at an altitude of 40 m to have a trajectory free of obstacles. Then, the start was determined at a lateral distance of −100 m from the node that corresponds also to the start of the data transmission of the sensor node. The UAV flies along a line segment of 200 m long, with a speed of successively 4, 6, and 8 m/s, and over the sensor node in the middle of its trajectory, see the operating mode in
Figure 10. Similarly, as in stationary experiments, the 100 data frames are received and stored by the collector node embedded in the UAV. The RSSI values are measured and recorded by the collector node.
2.2.3. Optimal Trajectory Planning for the UAV
Once the feasibility will be demonstrated to collect the data frames of a buried sensor node from a collector node embedded in a UAV, the next point to be considered will be the limited flight time of the UAV. In fact, even a high-end UAV cannot generally fly more than forty minutes in favorable conditions (i.e., low payload, air temperature above
). In case of numerous buried sensor nodes to be visited with limited coverage ranges, the UAV’s trajectory has to be optimized. This problem can be considered a Traveling Salesman Problem (TSP) [
36,
37]. The time complexity of such a problem will increase with the number of nodes. The total number of possible routes is
. The calculation of all the possible routes is, therefore, rapidly prohibitive in terms of computational time. For example, 25 nodes lead to about
possible routes. By considering a computer able to calculate 1 billion routes per second, it would take
, i.e., 10 million years to calculate all the paths. To find sub-optimal solutions to this problem, we implemented two evolutionary algorithms: a genetic algorithm (GA) and an ant colony optimization (ACO).
The genetic algorithm is an evolutionary algorithm inspired by the evolution theory of Darwin. From an initial population, new generations are successively created with some mutations. The principle of the algorithm proposed in this paper is depicted in
Figure 11 and inspired from [
38]. The algorithm starts with the creation of a population of one hundred routes of the UAV, randomly chosen and passing above all the buried sensor nodes (waypoints). This population is next divided in groups of four routes: in each group, the best route, i.e., the one with the minimal Euclidian distance, is kept and called the survivor. The other routes of the group are replaced by copies of the survivor and mutations are applied: on a random interval, the node orders are either reversed, shifted, or swapped. All the routes are then randomly remixed to form the new population. This process is repeated until an end condition is satisfied (e.g., the length of the obtained route does not change anymore). The advantage of such an algorithm is to be relatively simple and easily programmable.
The ant colony algorithm is inspired by the behavior of ants which are able to progressively find the shortest route between their colony and a source of food [
39]. This behavior is explained by the fact that each ant deposits an organic substance on the ground called pheromone. The ants will follow the route which has the higher level of pheromone (this substance evaporates in time). At the beginning, the ants explore several routes while depositing pheromones. Progressively, as more a path is followed, more the ants will choose this route, the shortest route is found. The principle of the ACO algorithm used in this paper is presented in
Figure 12. At the beginning (left column), the ants are numbered from 1 to n, and are distributed in the different waypoints (n is superior to the number of waypoints
p). The visibility matrix
is calculated (inverse of the distance between two waypoints: constant), as well as the pheromone matrix
(level of pheromone between two waypoints: will vary with time). By considering an ant in a waypoint
, the next waypoint of this ant is determined by the point-to-point multiplication of the line
of the visibility matrix by the line
of the pheromone matrix. This gives a probability vector which is presented in the form of cumulative probability varying from 0 to 1. A random value (to give a chance to explore other routes) is compared to the values of this probability vector that determines the next waypoint for this ant. Once all the ants have visited all the waypoints, the best route corresponding to the minimal Euclidian distance is memorized. The pheromone matrix is then updated with this route and the values of the pheromone matrix is decreased with a percentage (evaporation). A new iteration can start.
4. Results Discussion
The objective of this study was to experimentally demonstrate the possibility of retrieving data frames of buried sensor nodes operating in LoRa from a collector node embedded in a UAV. This study is distinguished from other work by the report of experimental results combining WUSN and UAV technologies (see the summaries of the work cited in this paper in
Table A2).
Table 4 summarizes the setup data of the developed system.
The impact of the UAV’s lateral position and altitude on the RSSI levels was first highlighted from experimentations performed in hovering mode. 21 targeted positions were defined, composed of 3 altitudes (20 m, 40 m, 60 m) and 7 lateral distances (0 m, 25 m, 50 m, 75 m, 100 m, 125 m, 150 m). The results showed that, for a given altitude, the RSSI value decreases progressively as the UAV is positioned away from the buried sensor node. For example, at 60 m altitude, the RSSI value goes from −89 dBm at the vertical of the node to −108 dBm at 150 m. Moreover, the results clearly showed the benefit in terms of RSSI signal to fly at a relatively high altitude when the UAV is far from the node. In fact, from the lateral distance of 50 m, the RSSI values are higher at high altitude than at low altitudes. For example, at the lateral distance of 100 m, the RSSI value at 60 m altitudes is −101 dBm, whereas, at 20 m altitude, the RSSI value is −109 dBm. The impact of the soil on the signal propagation can explain that phenomenon. On the contrary, near the vertical of the node, the results showed that it is preferable to fly at low altitude.
The data collection process can also be performed when the UAV is moving. Experiments were performed at different speeds, from 4 m/s to 8 m/s. 100 data frames, memorized in the buried sensor node, were transmitted, with a delay of 300 ms between each data frame transmission. The data frames were correctly collected at the three velocities, highlighting the possibility of performing this task dynamically. However, that dynamic approach requires carefully determining the time to collect the data frames, depending on numerous factors. One of them is obviously the number of data to be collected from a buried sensor node. The parameters of the LoRa communication, in particular the SF, BW, and CR, also impact the transmit time of a data frame. If these factors are known, the time to collect the data can be previously estimated to adapt the speed and trajectory of the UAV accordingly.
Finally, two evolutionary algorithms were implemented to plan the trajectory of the UAV in case of numerous buried sensor nodes to be visited. Considering a set of 25 buried sensor nodes distributed in the environment, similar results were obtained in terms of trajectory planning after 1000 iterations with a genetic algorithm and an ant colony algorithm. The execution time of the genetic algorithm was, however, faster than with the ant colony algorithm, respectively 2.4 s and 24.2 s.
Table 5 gives an overview of the main results of the experimentations.
6. Future Work
Our future work will concentrate on the improvement of the UAV’s trajectory planning algorithm with the consideration of additional constraints. In particular, the definition of priority will be added on each waypoint as some data can be more urgent to collect on some buried sensor nodes than others. Moreover, clusters of waypoints will be defined as the UAV has not to be at the vertical of a buried sensor node to collect the data. The experiments reported in this paper showed, in fact, the possibility to horizontally shift the UAV of 150 m from the buried node and collect the data despite this shift (−108 dBm at 150 m and 60 m altitude). Intersections of coverage ranges can therefore be taken into account. In addition, as previously mentioned, it would be interesting to predict the time necessary for the data collection process with respect to different factors (e.g., the date of the last data collection to have the number of data frames to collect, LoRa parameters) and to predict the communication range of each buried sensor nodes with respect to the burial depth and various environmental factors (e.g., soil moisture, soil composition, compaction) to adapt the UAV’s flight altitude. Some situations may also require several flights to collect the data of all the nodes as the UAV has the autonomy of flight limited. All these aspects require the development of optimization algorithms and adapting the trajectories of UAV accordingly.
In parallel, some experiments will be carried out with sensor nodes buried more deeply. This depth will be a function of the area where the nodes will be positioned (e.g., edge of the field, under a circulation area, in the middle of a field with farm activities). In addition, the analysis of the quality of the communication link between the buried sensor nodes and the collector node will be carried out. To this aim, the percentage of the lost data frames will be studied with respect to the quality of the LoRa communication link (RSSI levels). It would be necessary to improve the protocol of the bi-directional communication link between the buried sensor nodes and the collector node. All these developments, combining WUSNs and UAVs technologies, aim to open new perspectives in the area of environmental monitoring.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}



















