
A Non-Contact and Real-Time Measurement Technique of Human Body Potential Using Electrostatic Induction Current Accompanied by Human Body Motion

Abstract
:
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
1. Introduction
2. Detection Principle
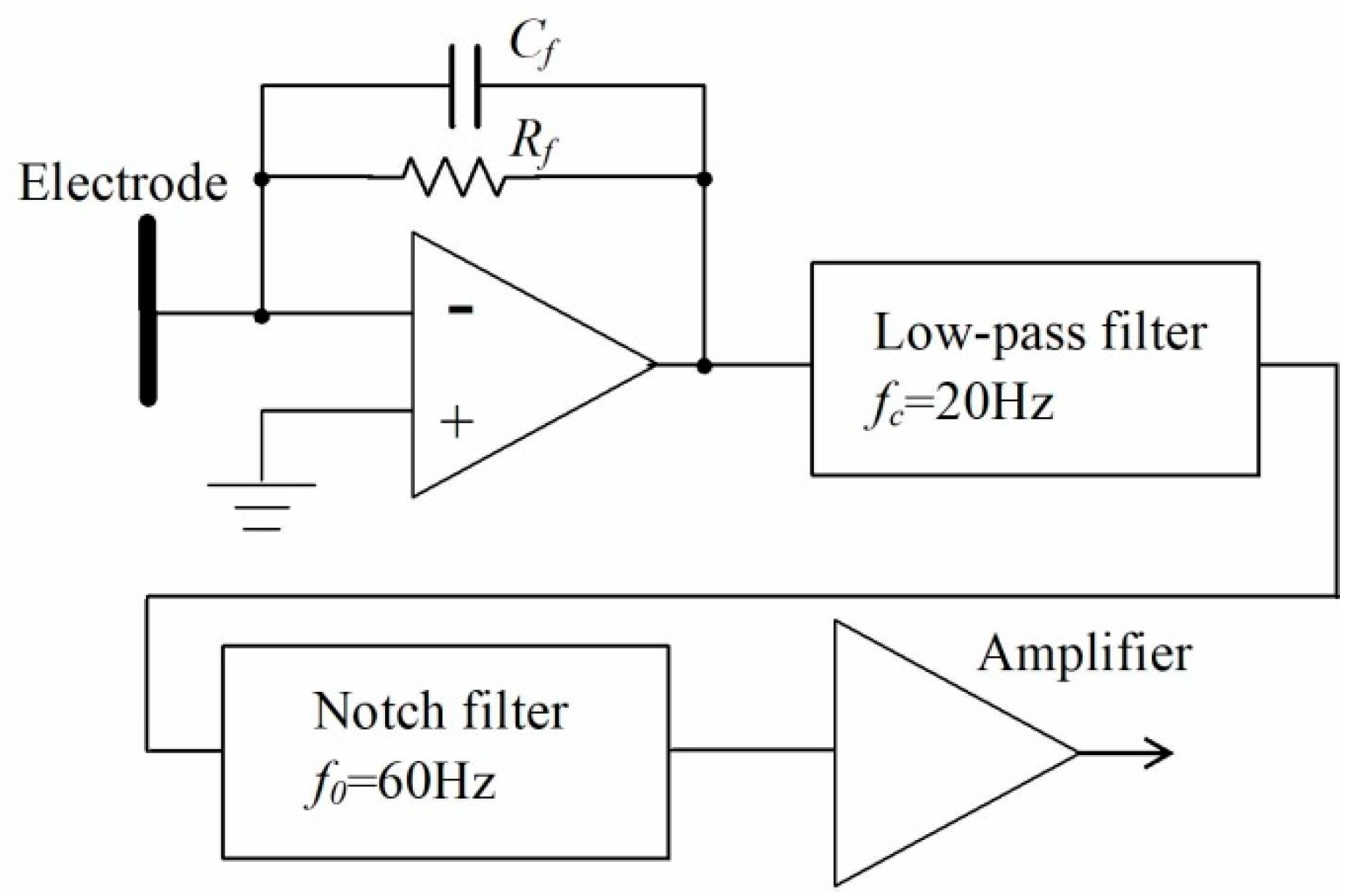
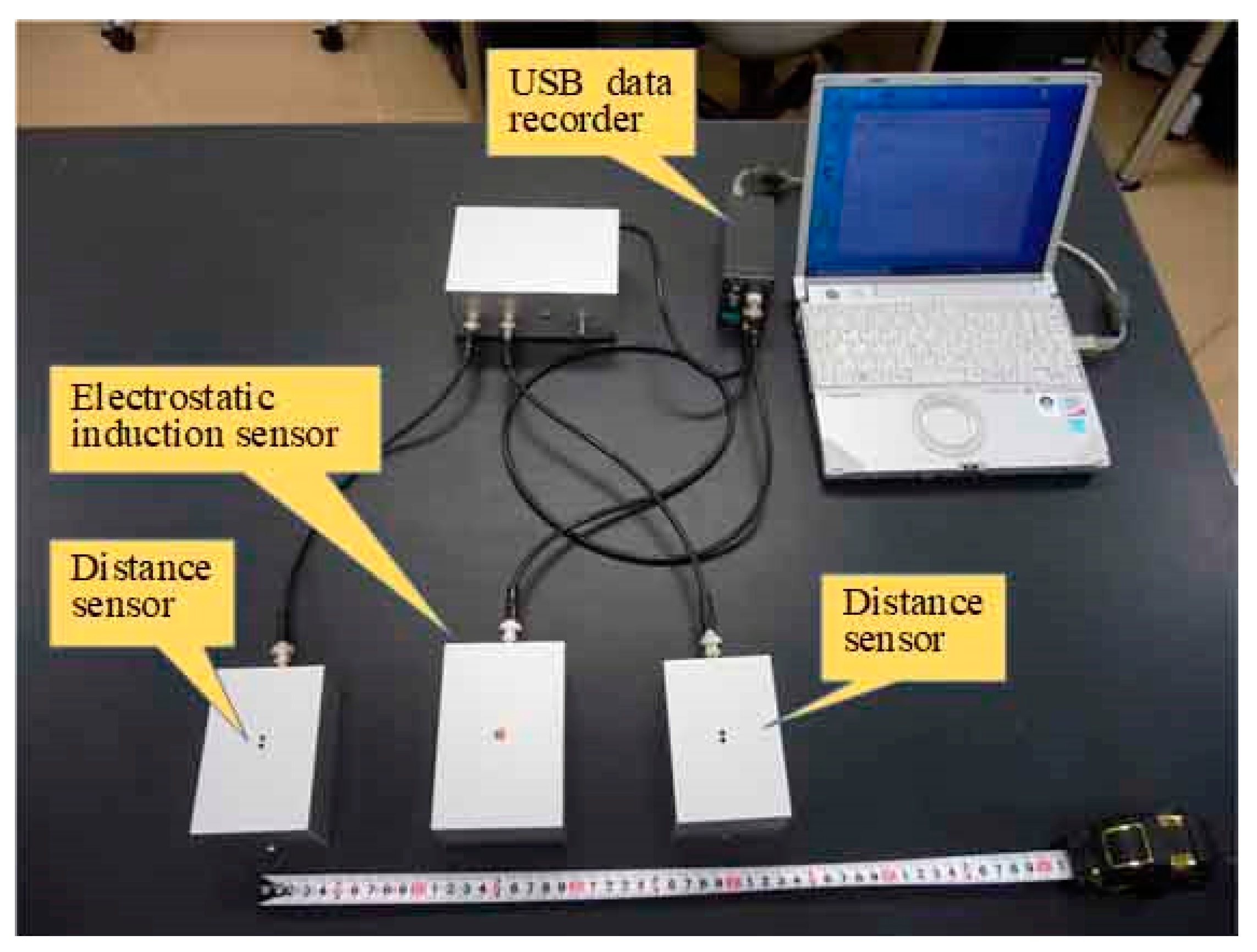
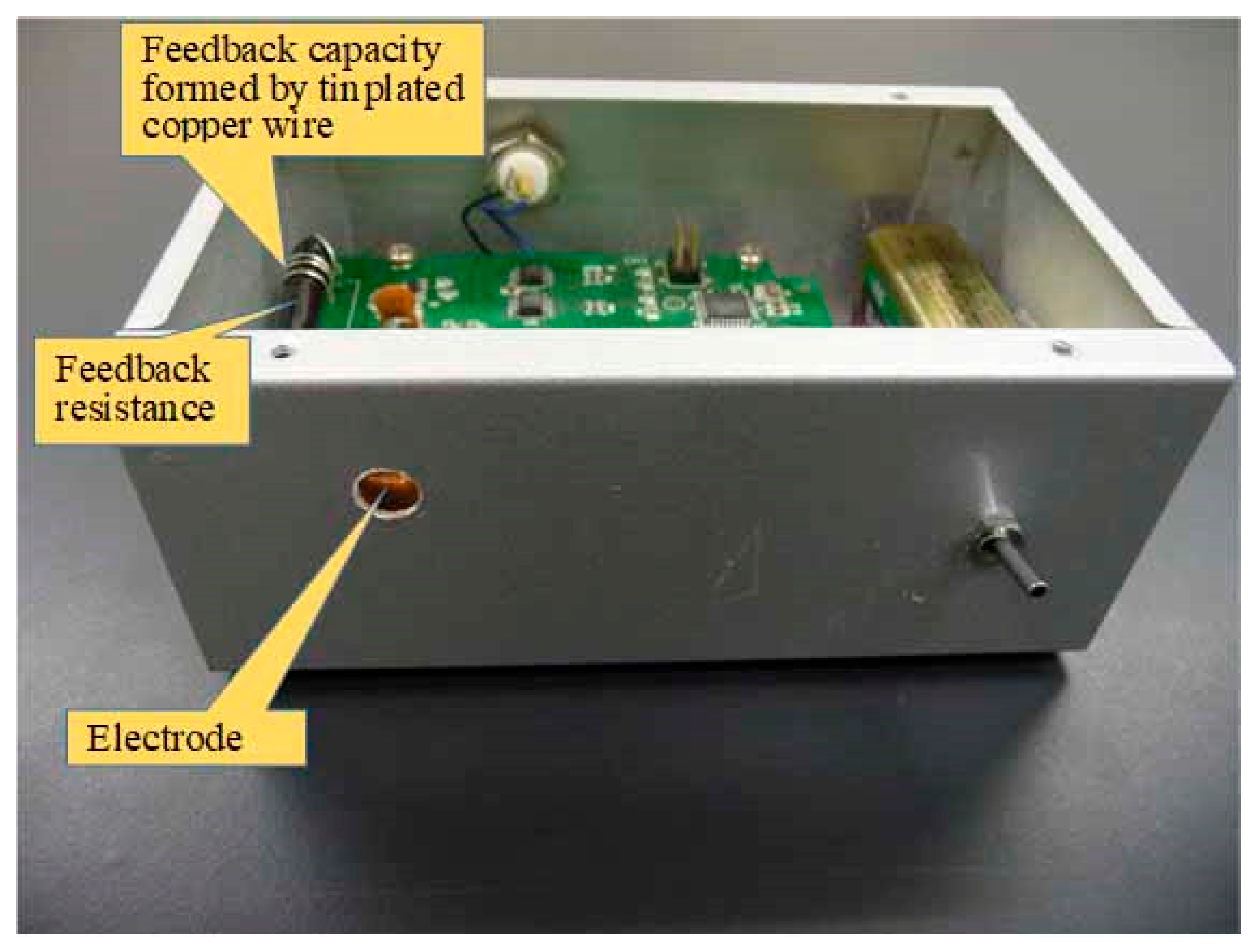
2.1. Overview of the Inductive Current Detection Sensor
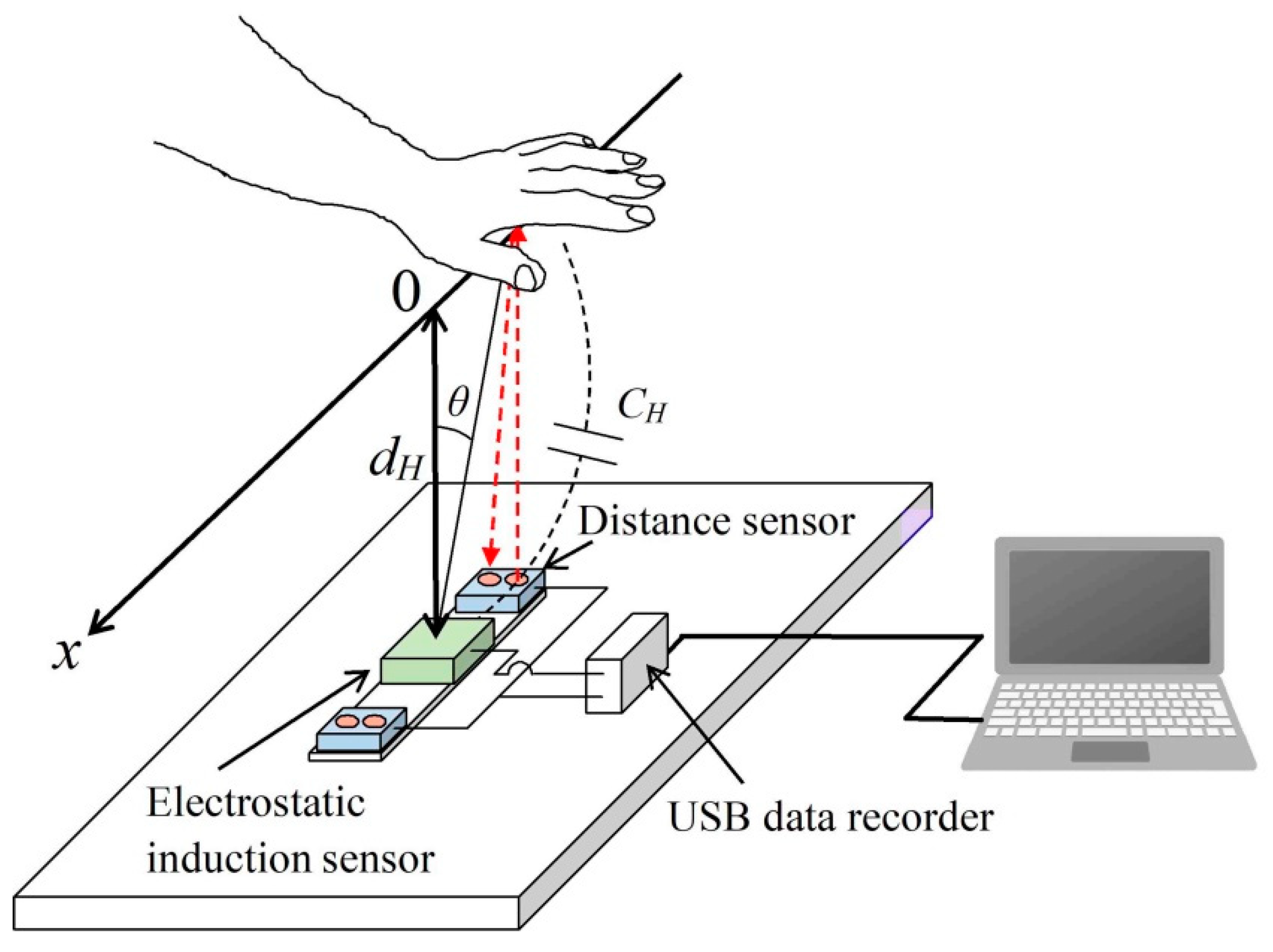
2.2. Human Body Potential Measurement Method by Palm Movement
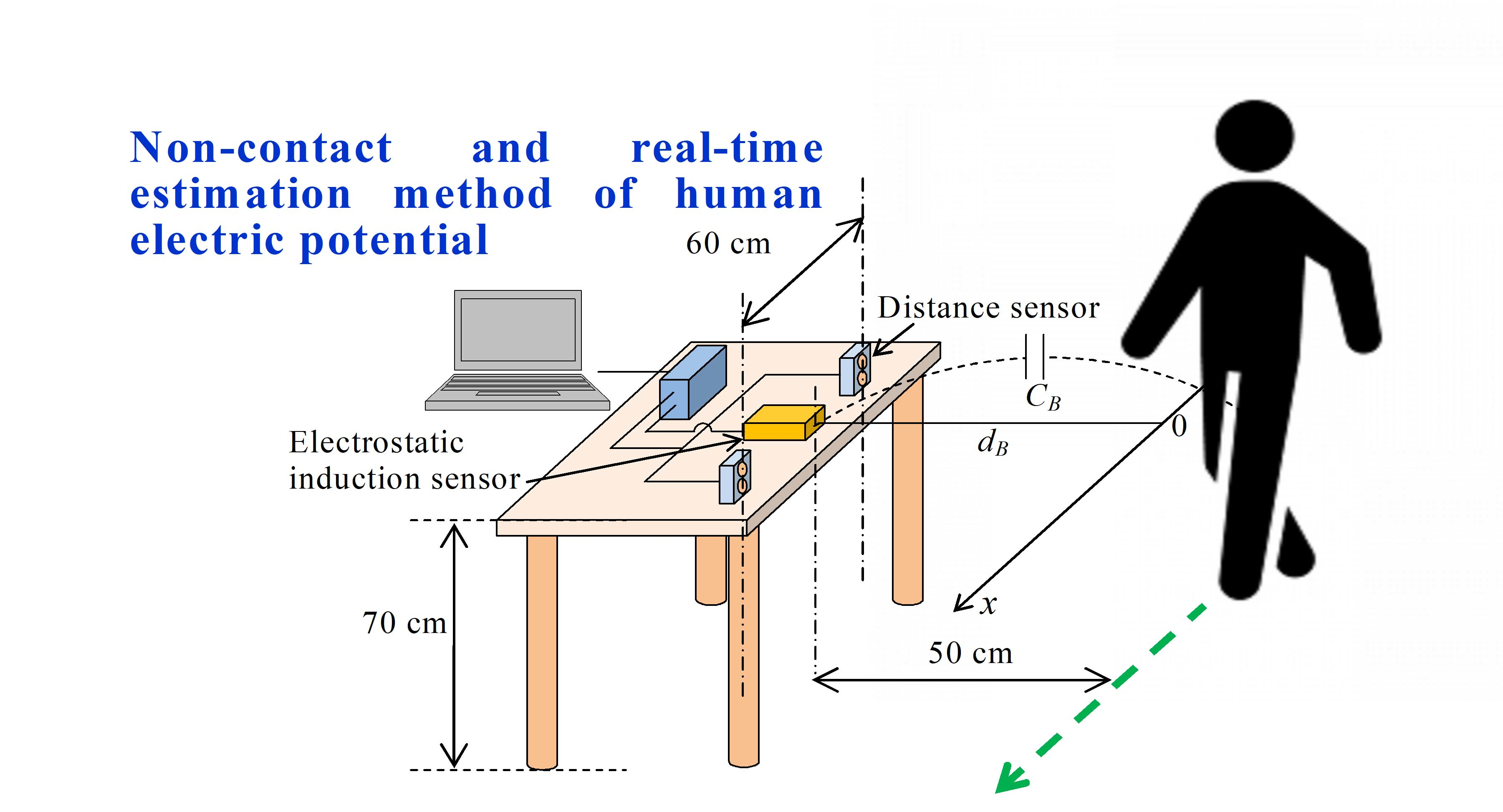
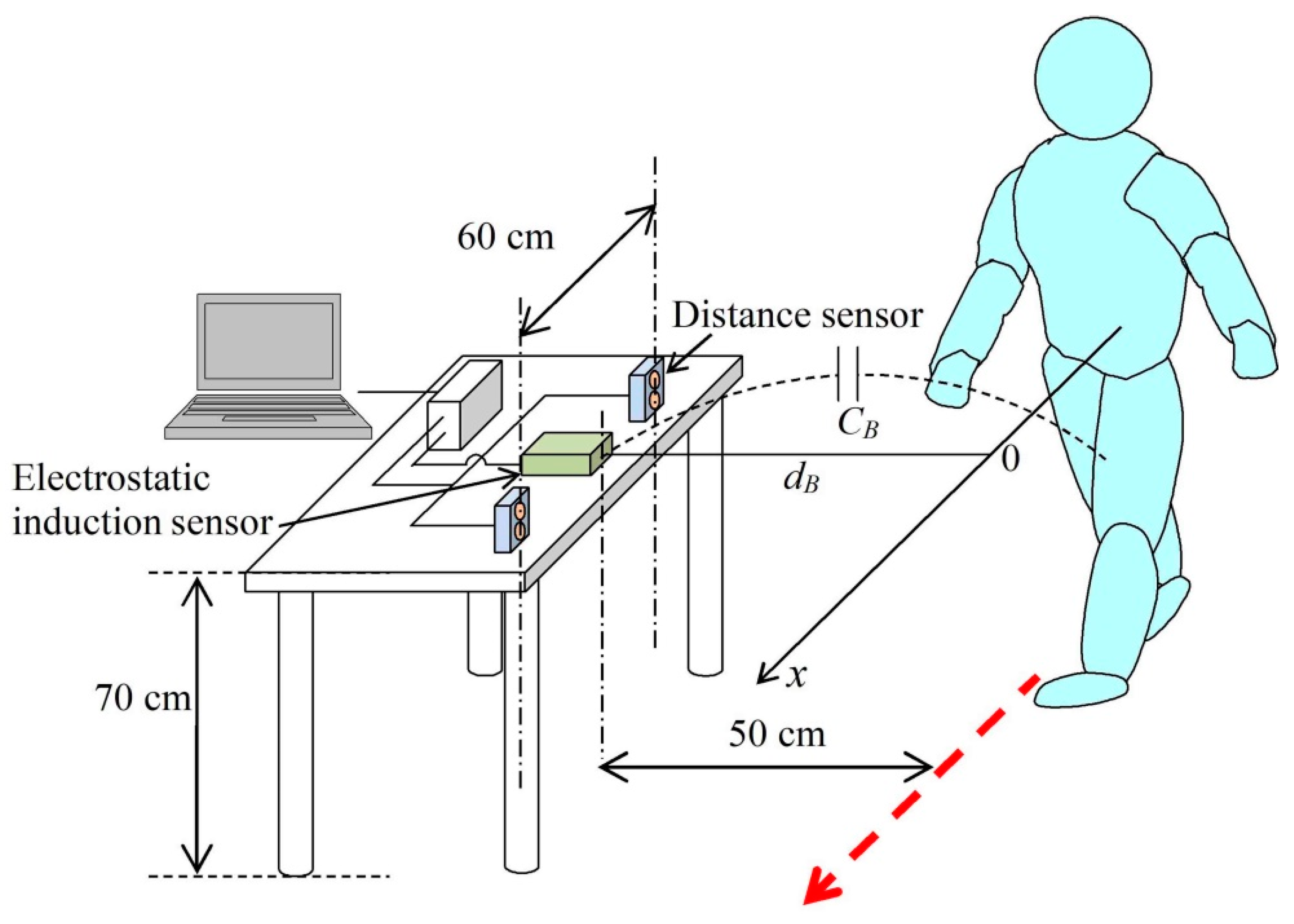
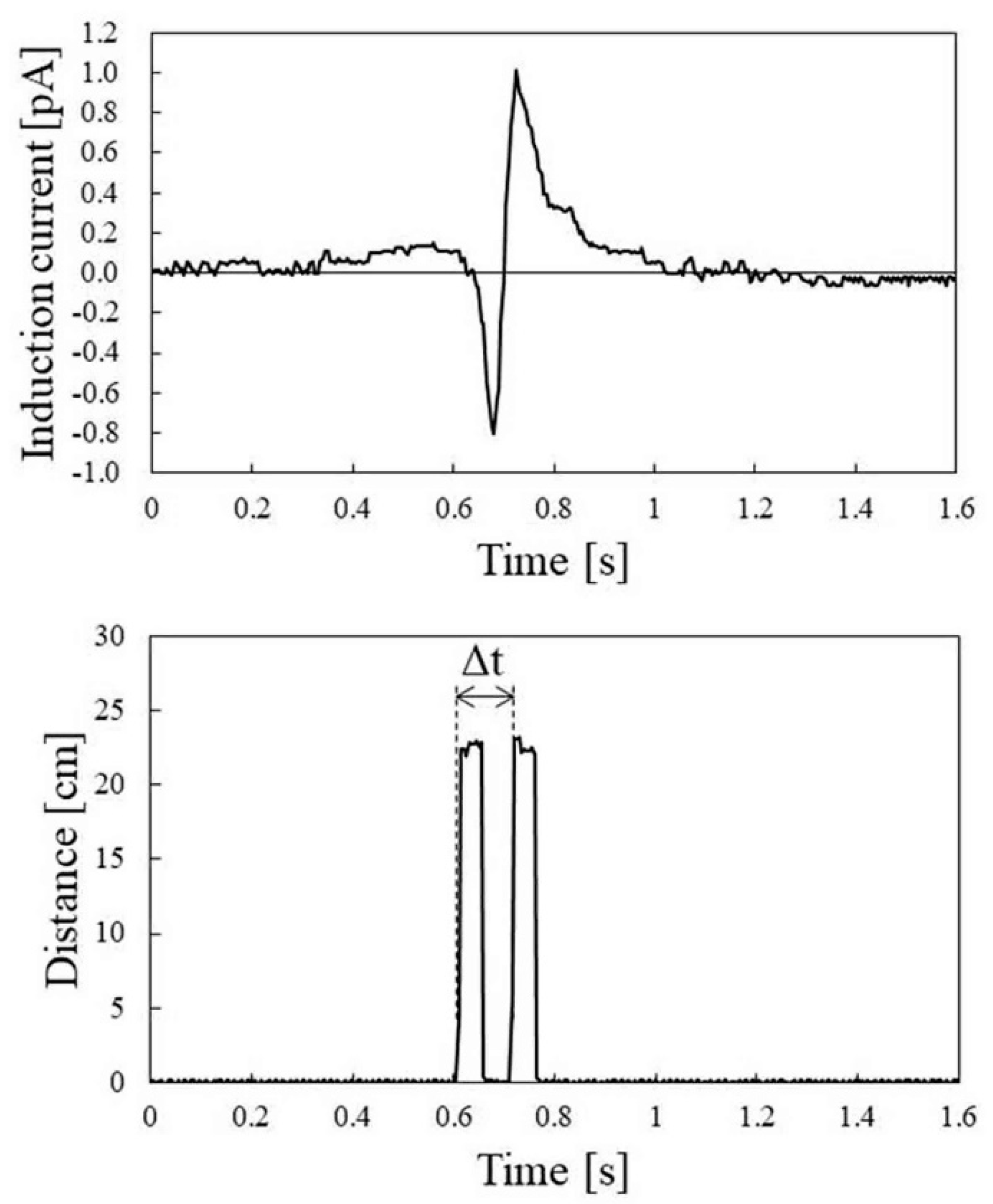
2.3. Human Body Potential Measurement Method by Walking Motion
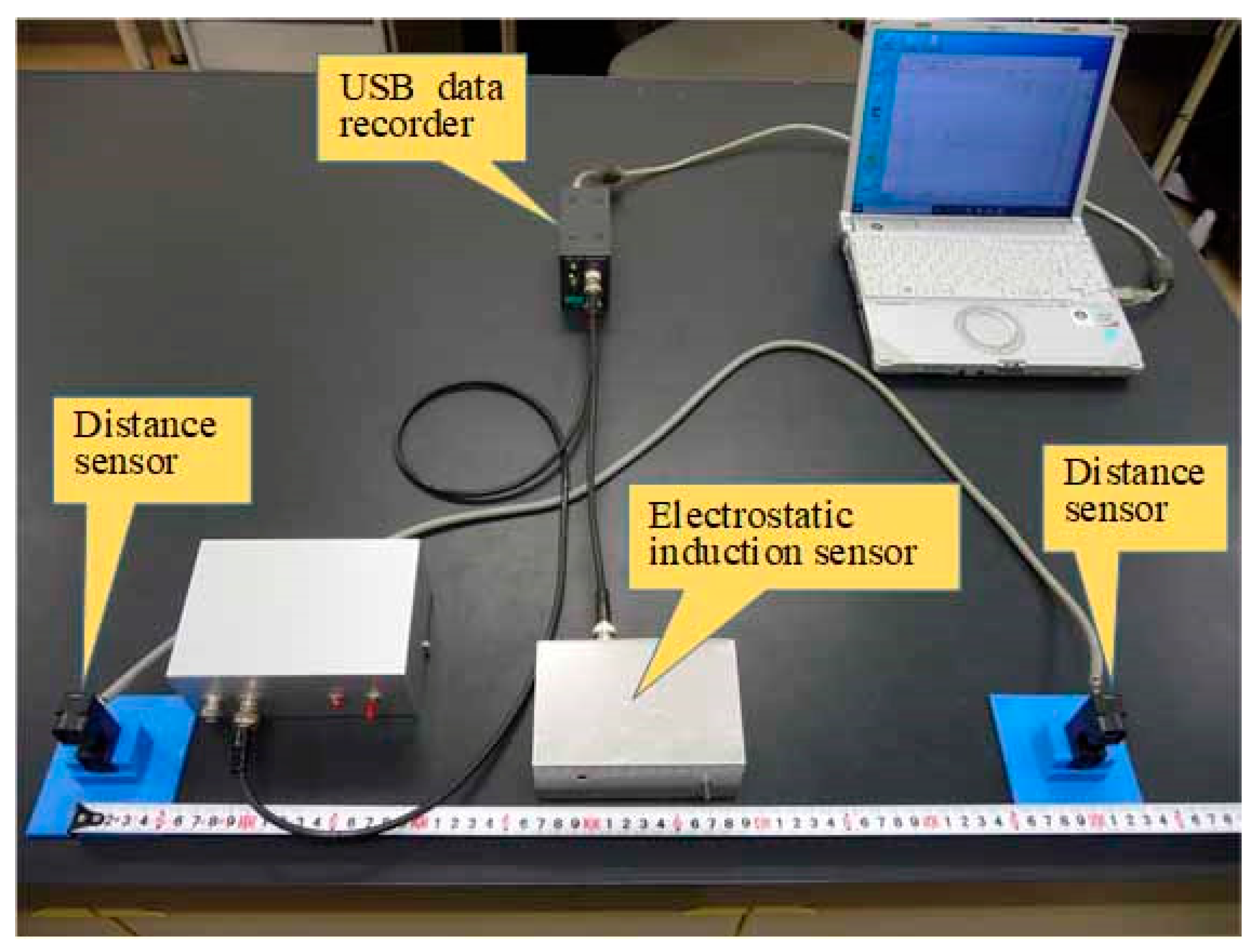
3. Experimental Method
3.1. Human Body Potential Measurement Method by the Movement of the Palm
3.2. Human Body Potential Measurement Method by Walking Motion
3.3. Experimental Procedure
4. Experimental Results and Discussion
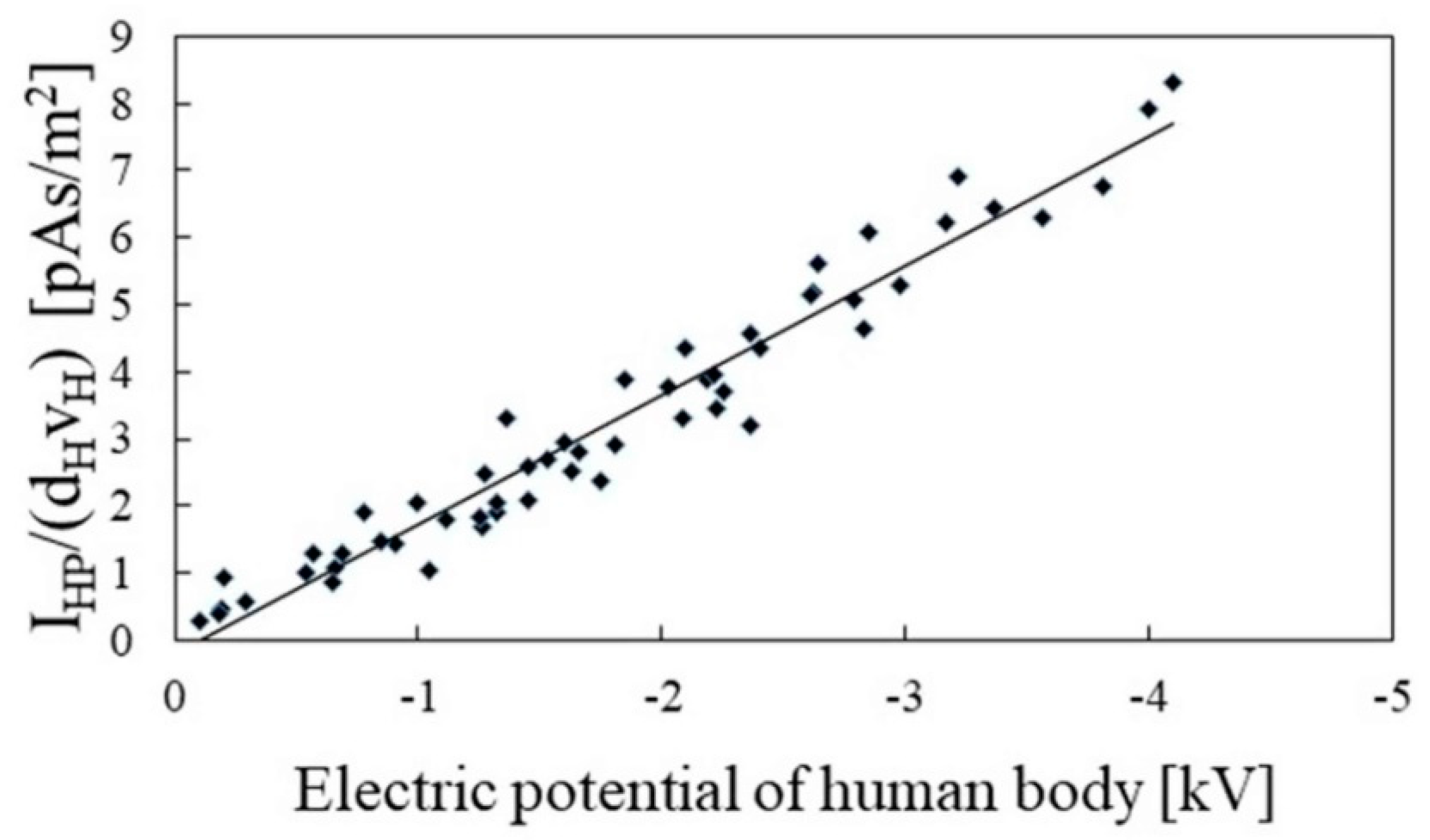
Relationship between Current Electrostatically Induced by Palm Movement and Human Body Potential
5. Conclusions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Jin, D.L. FCBM-a field-induced charged-board model for electrostatic discharges. IEEE Trans. Ind. Appl. 1993, 29, 1047–1052. [Google Scholar] [CrossRef]
- Wallash, A.J.; Hughbanks, T.S.; Voldman, S.H. ESD failure mechanisms of inductive and magnetoresistive recording heads. J. Electrost. 1996, 38, 159–173. [Google Scholar] [CrossRef]
- Strojny, J.A. Some factors influencing electrostatic discharge from a human body. J. Electrost. 1997, 40–41, 547–552. [Google Scholar] [CrossRef]
- Wallash, A. A study of shunt ESD protection for GMR recording heads. J. Electrost. 2002, 56, 295–302. [Google Scholar] [CrossRef]
- Paasi, J. Assessment of ESD threats to electronic components. J. Electrost. 2005, 63, 589–596. [Google Scholar] [CrossRef]
- Jutong, N.; Sompongse, D.; Siritaratiwat, A. Dependence of discharge path on breakdown characteristic of tunneling magnetoresistive read heads. J. Electrost. 2010, 68, 503–507. [Google Scholar] [CrossRef]
- Chiampi, M.; Zilberti, L. Induction of Electric Field in Human Bodies Moving Near MRI: An Efficient BEM Computational Procedure. IEEE Trans. Biomed. Eng. 2011, 58, 2787–2793. [Google Scholar] [CrossRef]
- Talaat, M. Charge simulation modeling for calculation of electrically induced human body currents. In Proceedings of the 2010 Annual Report Conference on Electrical Insulation and Dielectric Phenomena (CEIDP 2010), West Lafayette, IN, USA, 17–20 October 2010; pp. 1–4. [Google Scholar]
- Fujiwara, O.; Okazaki, M.; Azakami, T. Electrification properties of human body by walking. Trans. IEICE 1990, E73, 876–878. [Google Scholar] [CrossRef]
- Fujiwara, O. New approaches for measurement of static electricity toward preventing ESD. IEICE Trans. Commun. 1992, E75-B, 131–140. [Google Scholar]
- Amoruso, V.; Helai, M.; Lattarulo, F. An improved model of man for ESD applications. J. Electrost. 2000, 49, 225–244. [Google Scholar] [CrossRef]
- Ficker, T. Electrification of human body by walking. J. Electrost. 2006, 64, 10–16. [Google Scholar] [CrossRef]
- Han, Y.; She, J.; Wen, Z.; Pommerenke, D.; Dai, L. Modeling human body walking voltage by human body capacitance. In Proceedings of the 2015 7th Asia-Pacific Conference on Environmental Electromagnetics (CEEM), Hangzhou, China, 4–7 November 2015; pp. 390–393. [Google Scholar]
- Mizuno, T.; Takashima, K.; Mizuno, A. Spectrum analysis of induction voltage from walking human body. J. Electrost. 2013, 71, 524–528. [Google Scholar] [CrossRef]
- KOGANEI Co., Ltd. Handy Surface Potential Meter DTY-KVS11. Available online: https://official.koganei.co.jp/product/DTY-KVS11_ALL (accessed on 2 August 2022).
- Prance, H.; Watson, P.; Prance, R.J.; Beardsmore-Rust, S.T. Position and movement sensing atmetre standoff distances using ambient electric field. Meas. Sci. Technol. 2012, 23, 115101. [Google Scholar] [CrossRef]
- Plessey Semiconductors Ltd. Epic Sensor Applications Guidebook. Available online: http://advante.ru/components/Plessey.pdf (accessed on 2 August 2022).
- Kurita, K.; Ueta, S. New Motion Control Method for Bipedal Robot Based on Noncontact and Nonattached Human Motion Sensing Technique. IEEE Trans. Ind. Appl. 2011, 47, 1022–1027. [Google Scholar] [CrossRef]
- Zheng, W.; Cui, Z. Determination of velocity and direction of human body motion based on electrostatic measurement. In Proceedings of the 2011 International Conference on Consumer Electronics, Communications and Networks (CECNet 2011), Xianning, China, 4–6 March 2011; pp. 4035–4039. [Google Scholar]
- Kurita, K.; Morinaga, S. Noncontact Detection of Movements of Standing up from and Sitting Down on a Chair Using Electrostatic Induction. IEEE Sens. J. 2019, 19, 8934–8939. [Google Scholar] [CrossRef]
- Fuketa, H. Ultra-Low Power Hand Gesture Sensor Using Electrostatic Induction. Sensors 2021, 21, 8268. [Google Scholar] [CrossRef]
- Zhang, L.; Chen, X.; Li, P.; Wang, C.; Li, M. A Method for Measuring the Height of Hand Movements Based on a Planar Array of Electrostatic Induction Electrodes. Sensors 2020, 20, 2943. [Google Scholar] [CrossRef]
- Kurita, K.; Morinaga, S. Detection Technique of Individual Characteristic Appearing in Walking Motion. IEEE Access. 2019, 7, 139226–139235. [Google Scholar] [CrossRef]
- Kurita, K. Human identification from walking signal based on measurement of current generated by electrostatic induction. Kansei Eng. Int. J. 2012, 11, 183–189. [Google Scholar] [CrossRef]
- Kurita, K. Visualization of individual feature amount appearing in daily performance based on electrostatic induction. In Proceedings of the 2017 International Conference on Intelligent Information and Biomedical Sciences, Okinawa, Japan, 24–26 November 2017; pp. 274–278. [Google Scholar]
- Kurita, K. New estimation method for the electric potential of the human body under perfect noncontact conditions. IEEJ Trans. Electr. Electron. Eng. 2009, 4, 309–311. [Google Scholar] [CrossRef]
- Chen, X.; Han, H. Research on Human-Computer Interaction Technology Based on Electrical Detection Technology. TechConnect Briefs 2016, 3, 144–147. [Google Scholar]










Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kurita, K. A Non-Contact and Real-Time Measurement Technique of Human Body Potential Using Electrostatic Induction Current Accompanied by Human Body Motion. Sensors 2022, 22, 7161. https://doi.org/10.3390/s22197161
Kurita K. A Non-Contact and Real-Time Measurement Technique of Human Body Potential Using Electrostatic Induction Current Accompanied by Human Body Motion. Sensors. 2022; 22(19):7161. https://doi.org/10.3390/s22197161
Chicago/Turabian StyleKurita, Koichi. 2022. "A Non-Contact and Real-Time Measurement Technique of Human Body Potential Using Electrostatic Induction Current Accompanied by Human Body Motion" Sensors 22, no. 19: 7161. https://doi.org/10.3390/s22197161
APA StyleKurita, K. (2022). A Non-Contact and Real-Time Measurement Technique of Human Body Potential Using Electrostatic Induction Current Accompanied by Human Body Motion. Sensors, 22(19), 7161. https://doi.org/10.3390/s22197161