
A New Positioning Method for Climbing Robots Based on 3D Model of Transmission Tower and Visual Sensor





Abstract
:1. Introduction
2. Analysis of the Tower Information Model
2.1. Analysis of the Working Environment of a Transmission Tower
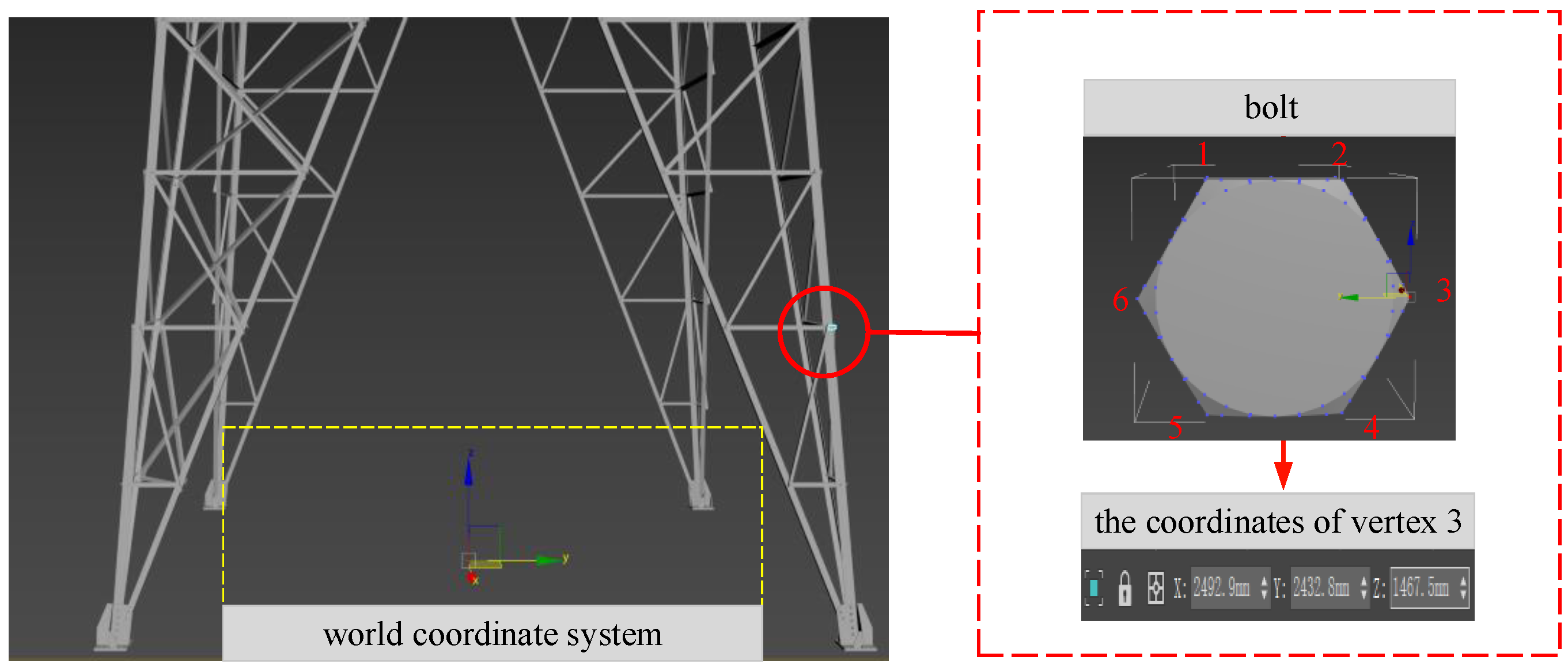
2.2. Deconstruction of the 3D Information Model of a Transmission Tower
3. Robot Pose Estimation
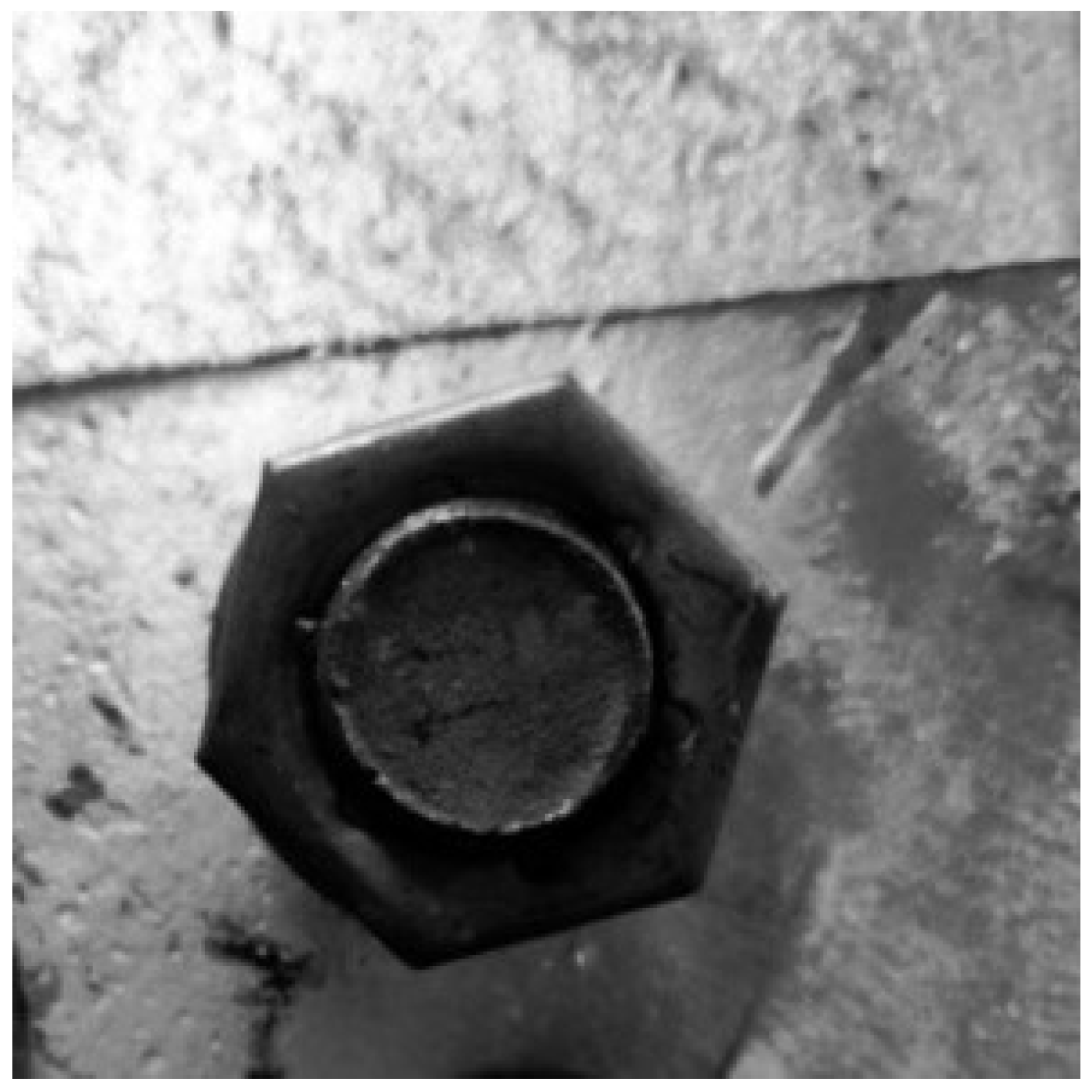
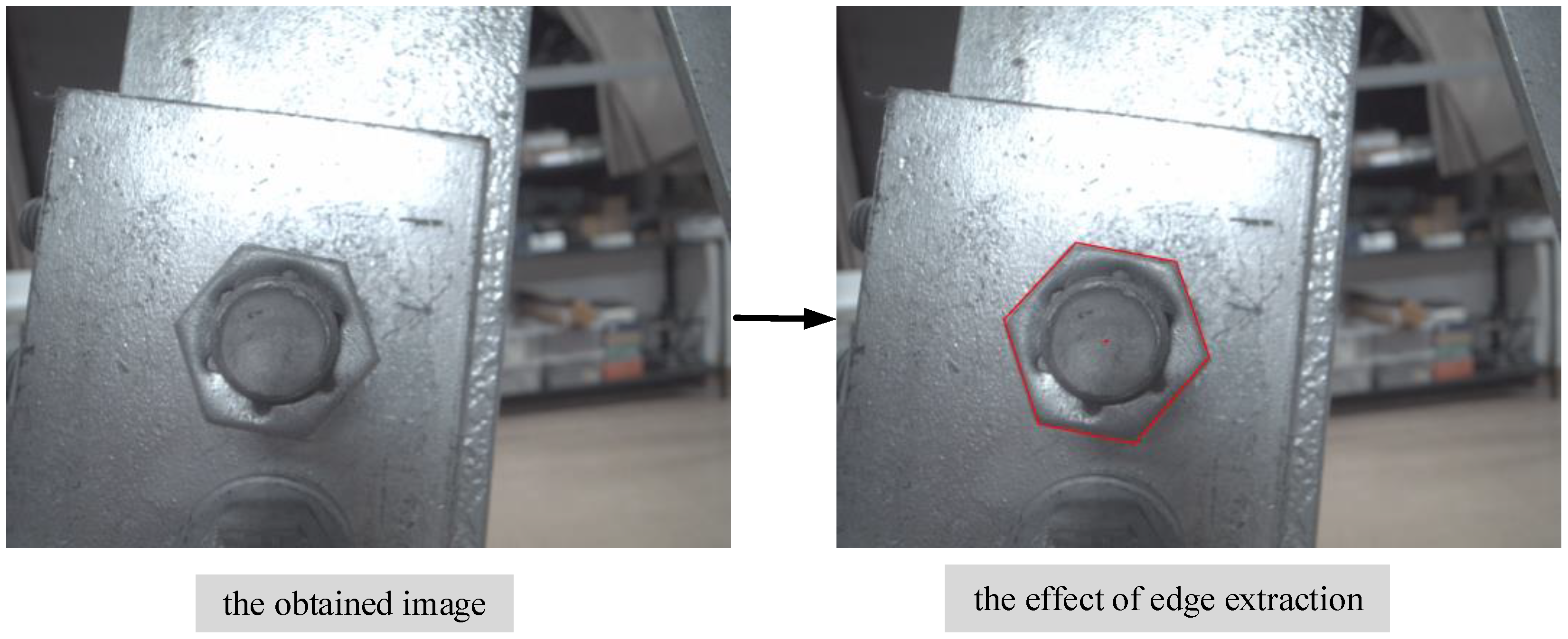
3.1. Extraction of the Bolt Edge Features
- Use the Gaussian filter to input the image, and take the convolution operation on the original image;
- Use the finite difference of the first-order partial derivatives to calculate the gradient magnitude image and the angle image;
- To exclude non-edge information, non-maximum suppression is performed on the gradient magnitude image;
- Use dual threshold and connection analysis to detect the connection of edges. After many experiments and comparisons, the comprehensive level of the extraction effect is the best when the ratio of the high threshold and the low threshold is 3:1.
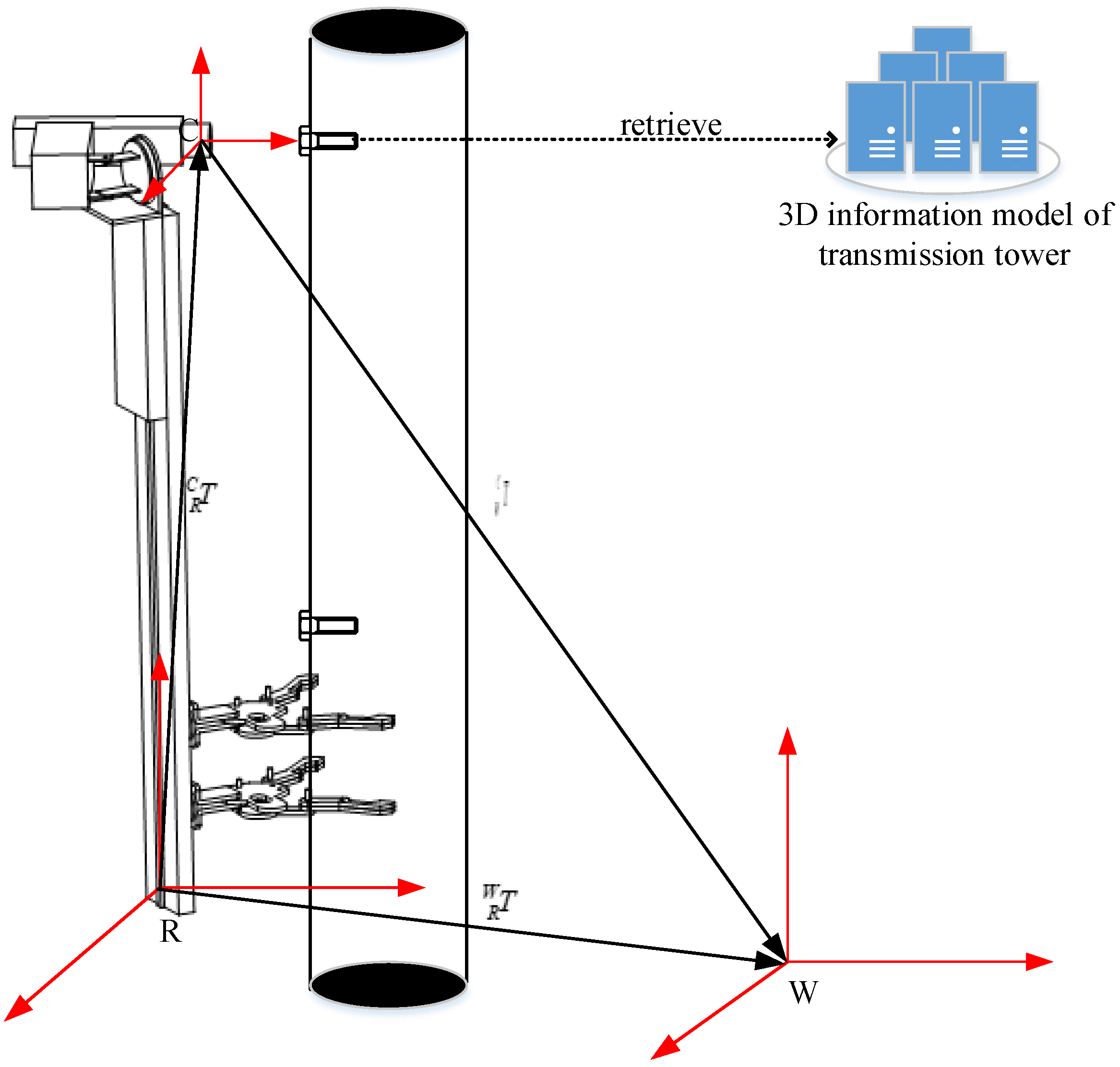
3.2. Pose Estimation Based on Point Feature Localization
4. Experiments and Analysis
5. Summary
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Lee, M.K.; Pak, C.W. Maintenance practices for transmission overhead lines. In Proceedings of the 9th IET International Conference on Advances in Power System Control, Operation and Management (APSCOM 2012), Hong Kong, China, 18–21 November 2012; pp. 1–6. [Google Scholar]
- Wang, R.; Zhang, S.; Chen, B.; Xu, J.; Zhong, L. Unmanned aerial vehicle (UAV) vision-based detection and location of power towers for transmission line maintenance. In Proceedings of the 16th IET International Conference on AC and DC Power Transmission (ACDC 2020), Online, 2–3 July 2020; pp. 1937–1941. [Google Scholar]
- Murata, I.; Chikura, T.; Kunimitsu, S.; Yoshida, A.; Akabane, T. Construction manipulators of steel towers for the transmission of electricity. In Proceedings of the 1997 IEEE/RSJ International Conference on Intelligent Robot and Systems, Grenoble, France, 11 September 1997; Volume 3, pp. 1678–1686. [Google Scholar]
- Wei, J.; Zhao, H.; Zhou, D.; Lu, S. Design and Analysis of a Robot Clamping Mechanism for Power Tower. In Proceedings of the 2020 Chinese Automation Congress (CAC), Shanghai, China, 6–8 November 2020; pp. 7527–7532. [Google Scholar]
- Tian, J.; Liu, Q.; Yuan, K. Design of Climbing Robot for Power Transmission Tower Maintenance. J. Phys. Conf. Ser. 2021, 1757, 012153. [Google Scholar] [CrossRef]
- Wu, Y.; Ta, X.; Xiao, R.; Wei, Y.; An, D.; Li, D. Survey of underwater robot positioning navigation. Appl. Ocean Res. 2019, 90, 101845. [Google Scholar] [CrossRef]
- Özgür, A.; YaŞar, C.F. Autonomous climbing robot for tank inspection. Procedia Comput. Sci. 2019, 158, 376–381. [Google Scholar]
- Liu, H.; Pang, G. Accelerometer for mobile robot positioning. IEEE Trans. Ind. Appl. 1999, 3, 1735–1742. [Google Scholar]
- Marco, A.G.; Machado, H.N.; Cristina, F.C.; Guilherme, A.S. Mobile robot outdoor localization using planar beacons and visual improved odometry. In Proceedings of the 2007 IEEE/RSJ International Conference on Intelligent Robots and Systems, San Diego, CA, USA, 29 October–2 November 2007; pp. 2468–2473. [Google Scholar]
- Meng, Z.; Wang, C.; Han, Z.; Ma, Z. Research on SLAM navigation of wheeled mobile robot based on ROS. In Proceedings of the 2020 5th International Conference on Automation, Control and Robotics Engineering (CACRE), Dalian, China, 19–20 September 2020; pp. 110–116. [Google Scholar]
- Shahoud, A.; Shashev, D.; Shidlovskiy, S. Visual Navigation and Path Tracking Using Street Geometry Information for Image Alignment and Servoing. Drones 2022, 6, 107. [Google Scholar] [CrossRef]
- Wang, J.; Dai, D.; Wang, P.; Zhao, H.; Xu, M.; Chen, Z. Geometrical Features based Visual Relocalization for Indoor Service Robot. In Proceedings of the 2020 5th International Conference on Communication, Image and Signal Processing (CCISP), Chengdu, China, 13–15 November 2020; pp. 118–122. [Google Scholar]
- Gao, M.; Yu, M.; Guo, H.; Xu, Y. Mobile Robot Indoor Positioning Based on a Combination of Visual and Inertial Sensors. Sensors 2019, 19, 1773. [Google Scholar] [CrossRef] [PubMed]
- Zhang, L.; El-Gohary, N.M. Automated IFC-based building information modelling and extraction for supporting value analysis of buildings. Int. J. Constr. Manag. 2020, 20, 269–288. [Google Scholar] [CrossRef]
- Lv, Z.; Shi, J.; Chen, P. Three-Dimensional Design Method of Overhead Transmission Line Based on BIM Technology. IOP Conf. Ser. Earth Environ. Sci. 2021, 719, 022001. [Google Scholar] [CrossRef]
- Zhang, R.; Yang, B.; Xiao, W.; Liang, F.; Liu, Y.; Wang, Z. Automatic Extraction of High-Voltage Power Transmission Objects from UAV Lidar Point Clouds. Sensors 2019, 11, 2600. [Google Scholar] [CrossRef]
- Dornaika, F.; Horaud, R. Simultaneous robot-world and hand-eye calibration. IEEE Trans. Robot. Autom. 1998, 14, 617–622. [Google Scholar] [CrossRef]
- Huo, J.; Zhang, G.; Cui, J.; Yang, M. A novel algorithm for pose estimation based on generalized orthogonal iteration with uncertainty-weighted measuring error of feature points. J. Mod. Opt. 2018, 65, 331–341. [Google Scholar] [CrossRef]
- Zhang, S.; Zhuo, L.; Zhang, H.; Li, J. Object Tracking in Unmanned Aerial Vehicle Videos via Multifeature Discrimination and Instance-Aware Attention Network. Sensors 2020, 12, 2646. [Google Scholar] [CrossRef]
- Deng, X.; Xiang, Y.; Mousavian, A.; Eppner, C.; Bretl, T.; Fox, D. Self-supervised 6d object pose estimation for robot manipulation. In Proceedings of the 2020 IEEE International Conference on Robotics and Automation (ICRA), Paris, France, 31 May–31 August 2020; pp. 3665–3671. [Google Scholar]
- Zhang, Z. A flexible new technique for camera calibration. IEEE Trans. Pattern Anal. Mach. Intell. 2020, 22, 1330–1334. [Google Scholar] [CrossRef] [Green Version]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Position (Height) | Value | X Deviation (cm) | Y Deviation (cm) | Z Deviation (cm) |
|---|---|---|---|---|
| 100 cm | Maximum value | 0.716 | 0.734 | 0.661 |
| Average value | 0.636 | 0.625 | 0.581 | |
| 130 cm | Maximum value | 0.695 | 0.656 | 0.624 |
| Average value | 0.642 | 0.584 | 0.587 | |
| 180 cm | Maximum value | 0.732 | 0.691 | 0.683 |
| Average value | 0.675 | 0.637 | 0.615 |
| SGI | VRL | CVIS | Ours | |
|---|---|---|---|---|
| Maximum relative deviation | 2.8% | 1.5% | 6.0% | 0.61% |
| Mean relative deviation | 1.4% | 0.63% | 3.6% | 0.54% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, Y.; You, J.; Du, H.; Chang, S.; Xu, S. A New Positioning Method for Climbing Robots Based on 3D Model of Transmission Tower and Visual Sensor. Sensors 2022, 22, 7288. https://doi.org/10.3390/s22197288
Liu Y, You J, Du H, Chang S, Xu S. A New Positioning Method for Climbing Robots Based on 3D Model of Transmission Tower and Visual Sensor. Sensors. 2022; 22(19):7288. https://doi.org/10.3390/s22197288
Chicago/Turabian StyleLiu, Yansheng, Junyi You, Haibo Du, Shuai Chang, and Shuiqing Xu. 2022. "A New Positioning Method for Climbing Robots Based on 3D Model of Transmission Tower and Visual Sensor" Sensors 22, no. 19: 7288. https://doi.org/10.3390/s22197288
APA StyleLiu, Y., You, J., Du, H., Chang, S., & Xu, S. (2022). A New Positioning Method for Climbing Robots Based on 3D Model of Transmission Tower and Visual Sensor. Sensors, 22(19), 7288. https://doi.org/10.3390/s22197288