
High-Precision Vital Signs Monitoring Method Using a FMCW Millimeter-Wave Sensor

Abstract
:1. Introduction
2. Principles
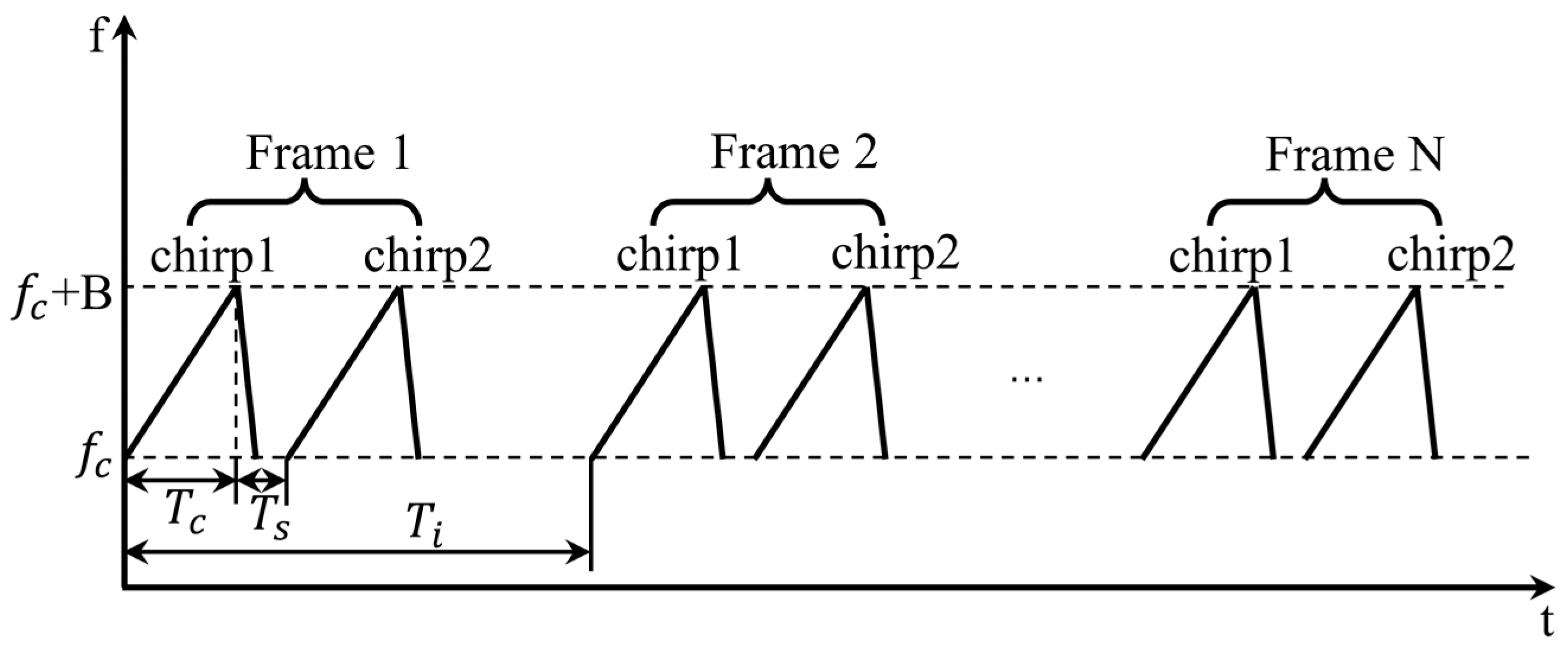
2.1. Signal Model of FMCW Radar
2.2. The Proposed Signal Processing Algorithm Chain
2.2.1. Range FFT and Static Signal-Clutter Removal
2.2.2. DC Offset Compensation
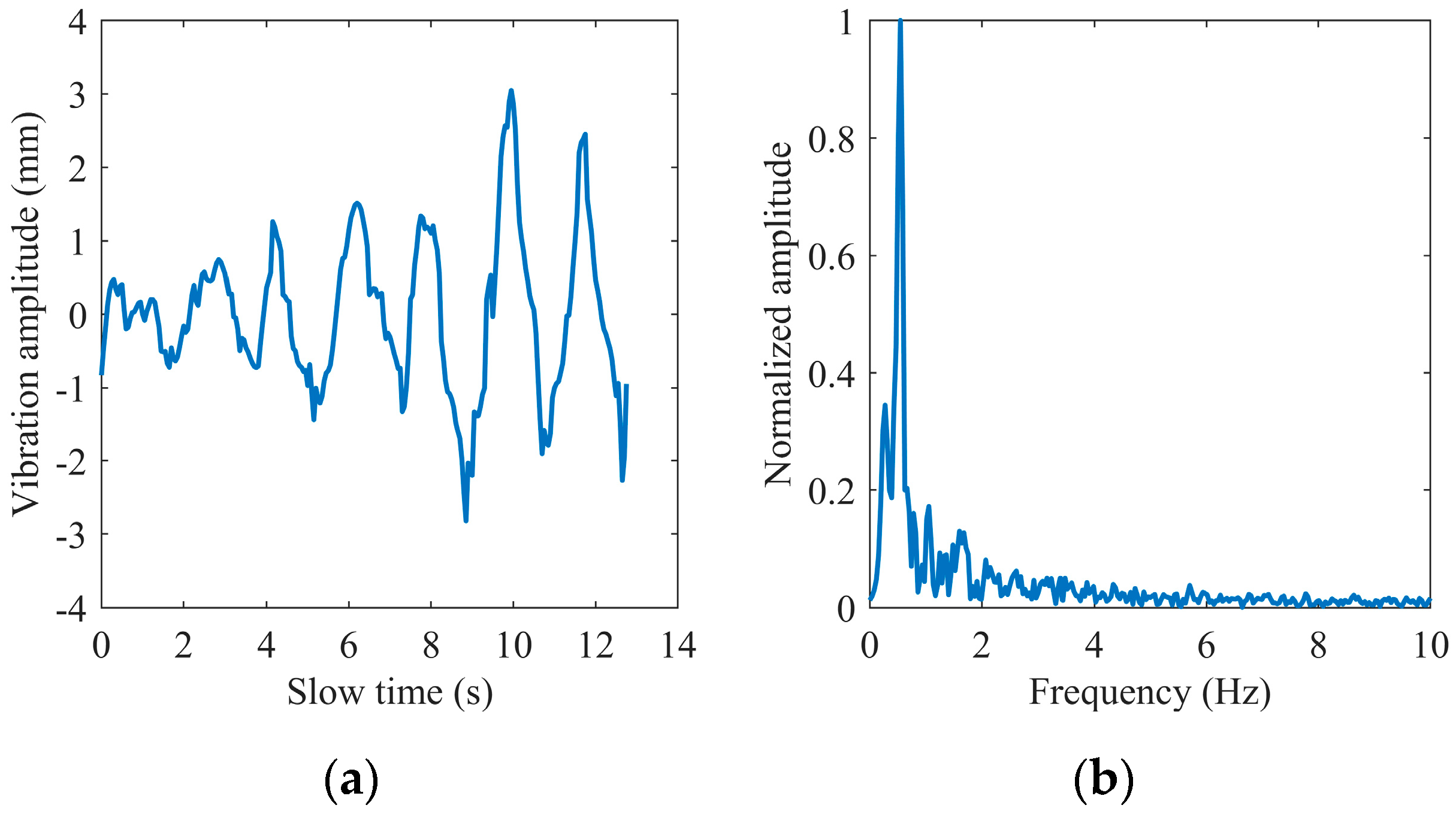
2.2.3. Phase Extraction and Difference Operation
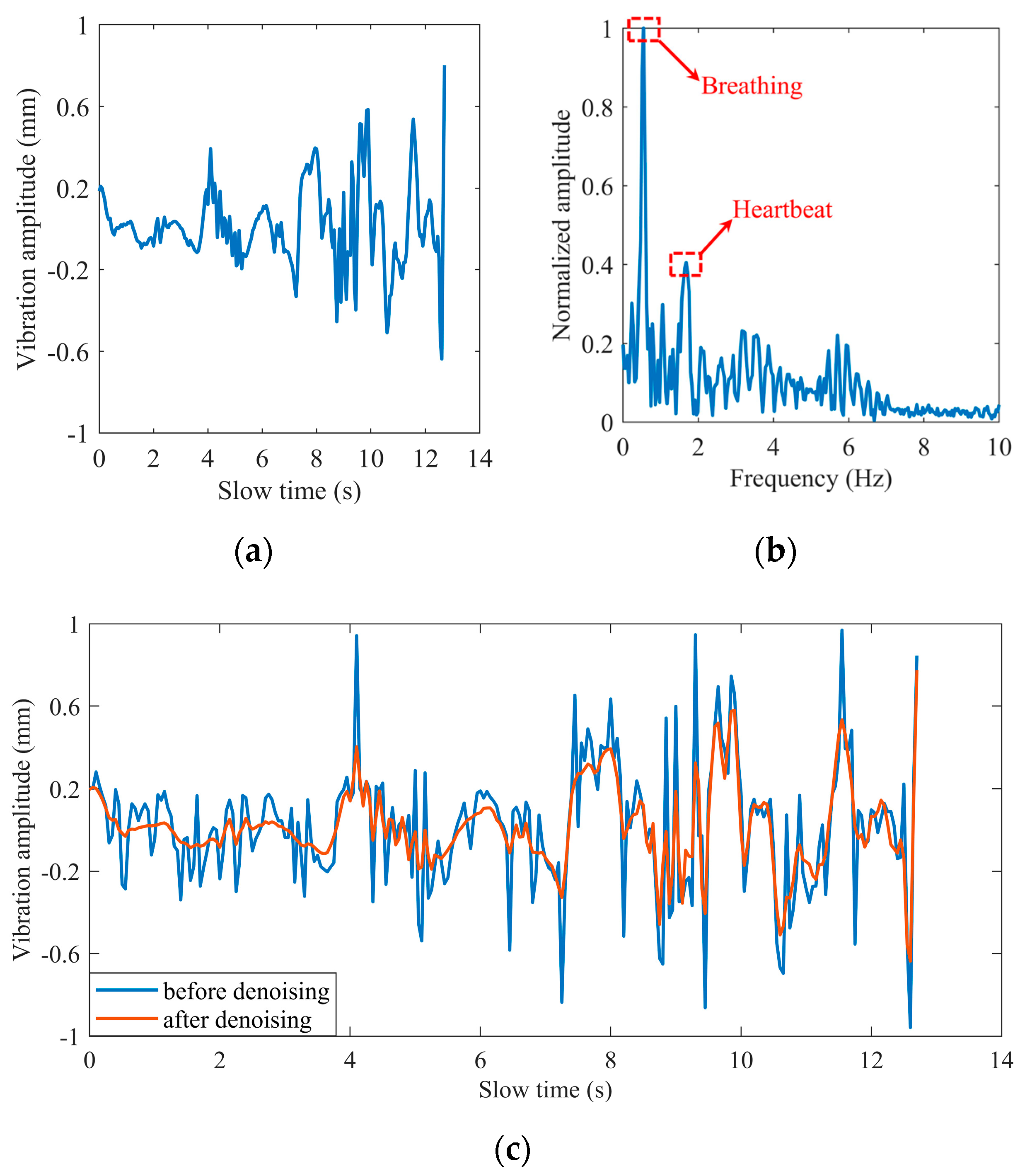
2.2.4. Iterative VMD Wavelet-Interval-Thresholding
- Select the appropriate wavelet basis function and determine the layers of the wavelet decomposition;
- Obtain a set of wavelet decomposition coefficients in the wavelet domain by wavelet decomposition of
- Set the threshold, and use the soft threshold function to process the wavelet coefficients.
- Reconstruct the signal by the processed wavelet coefficients to obtain the denoised signal .
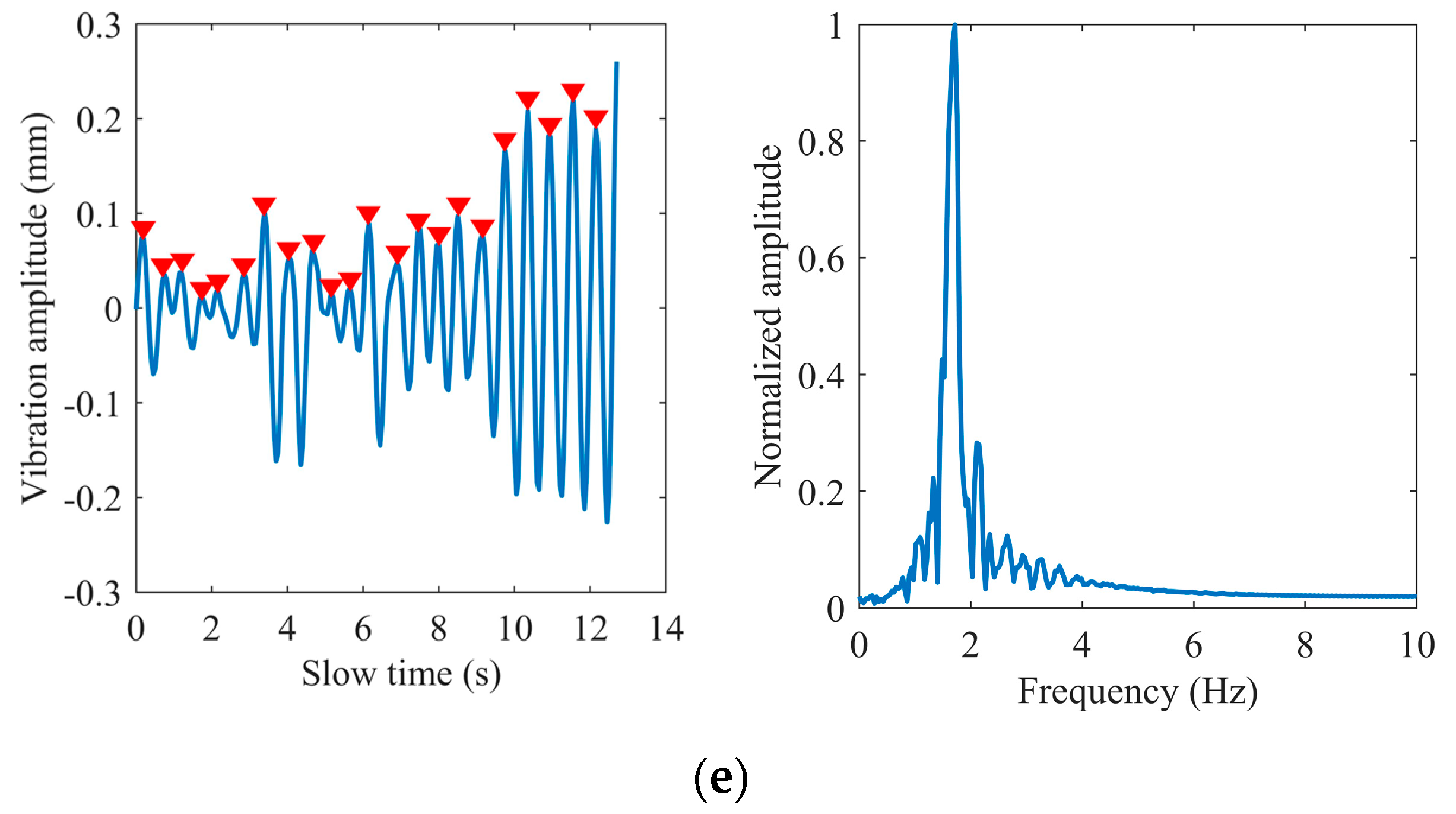
2.2.5. Vital Signs Detection
- The FFT-CZT hybrid algorithm mentioned above
- Peek-seeking in the time domain
3. Experiments
4. Results
4.1. Scenario Settings
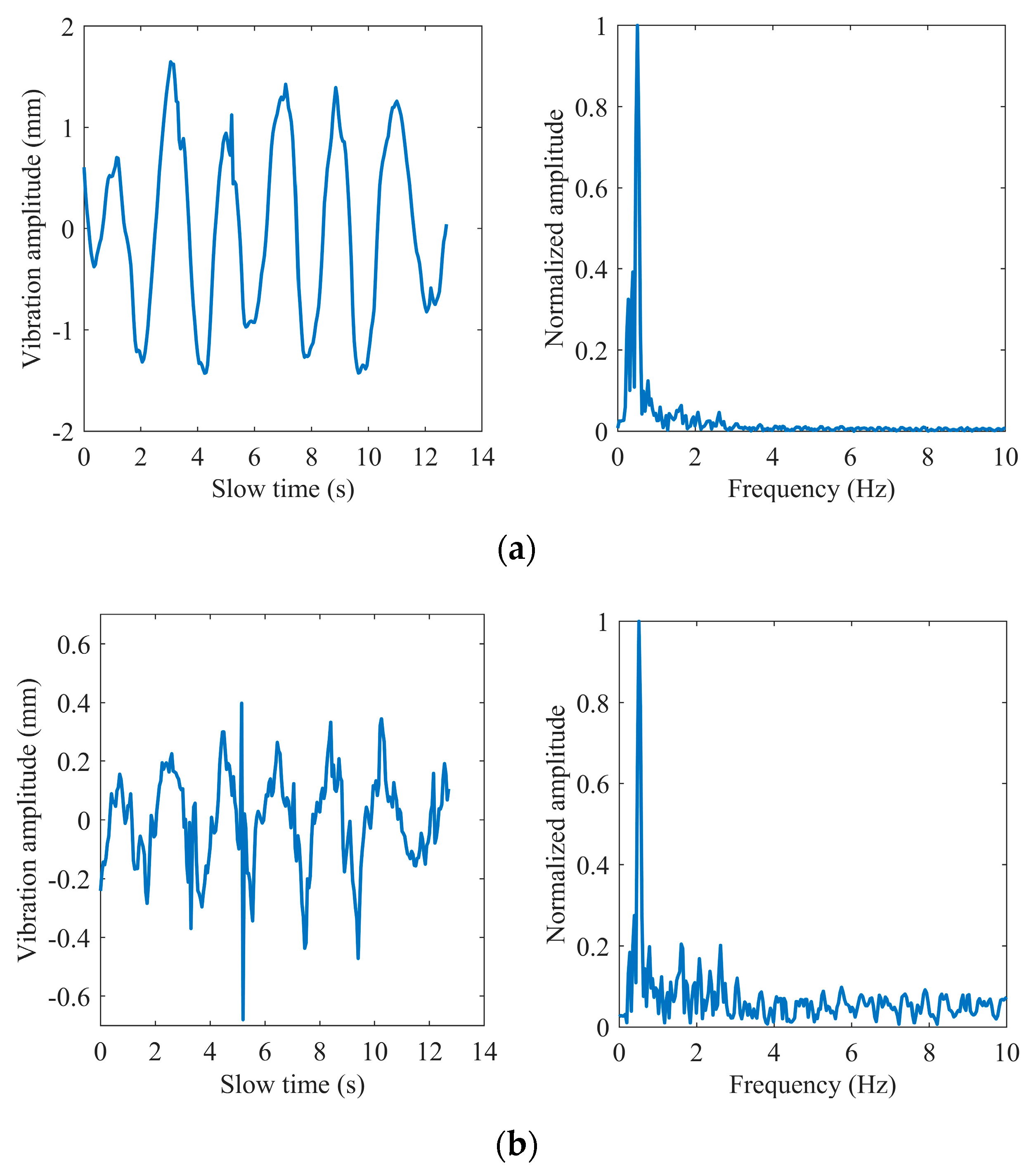
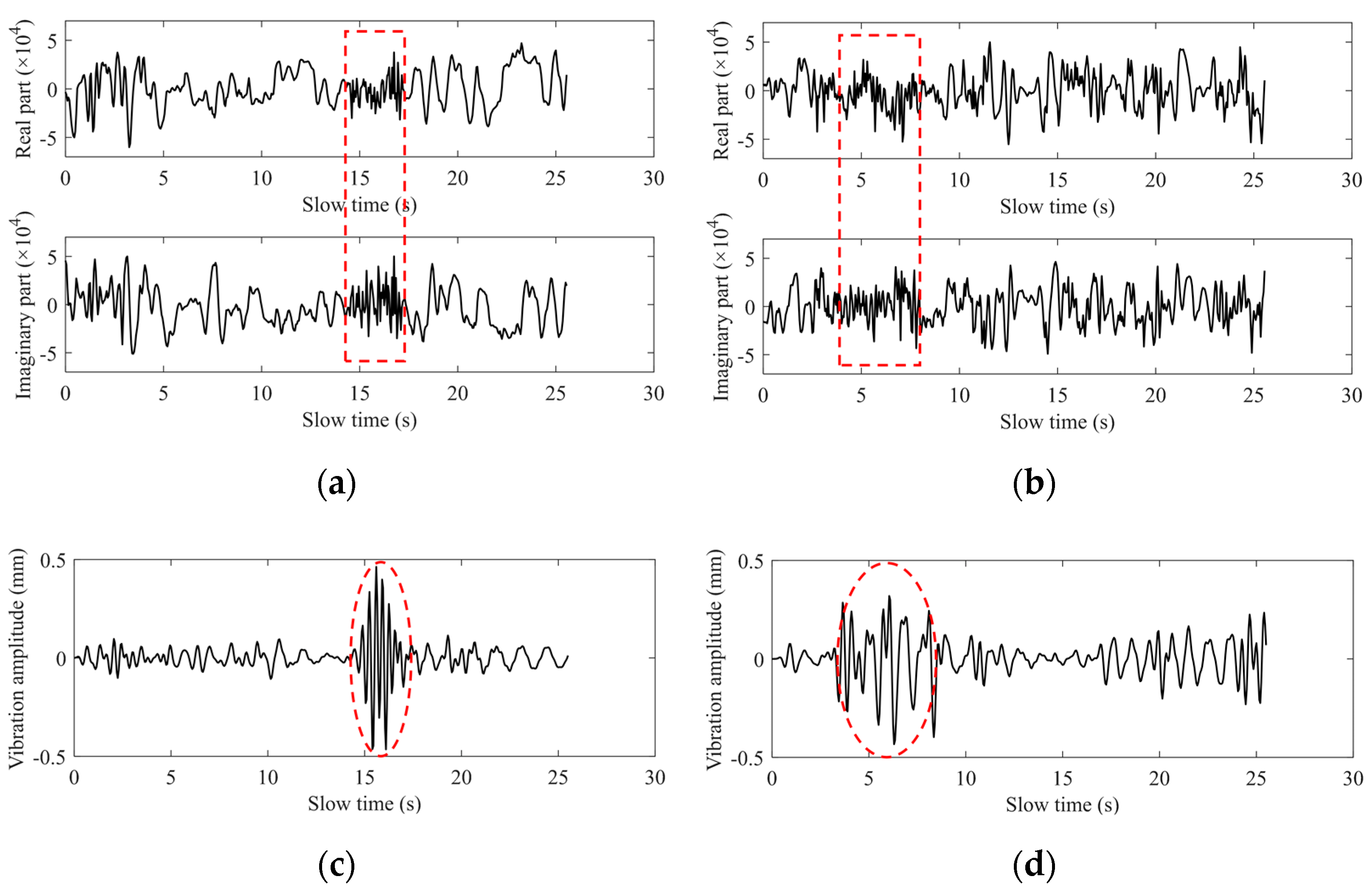
4.2. Vital Signs Waveform Recovery
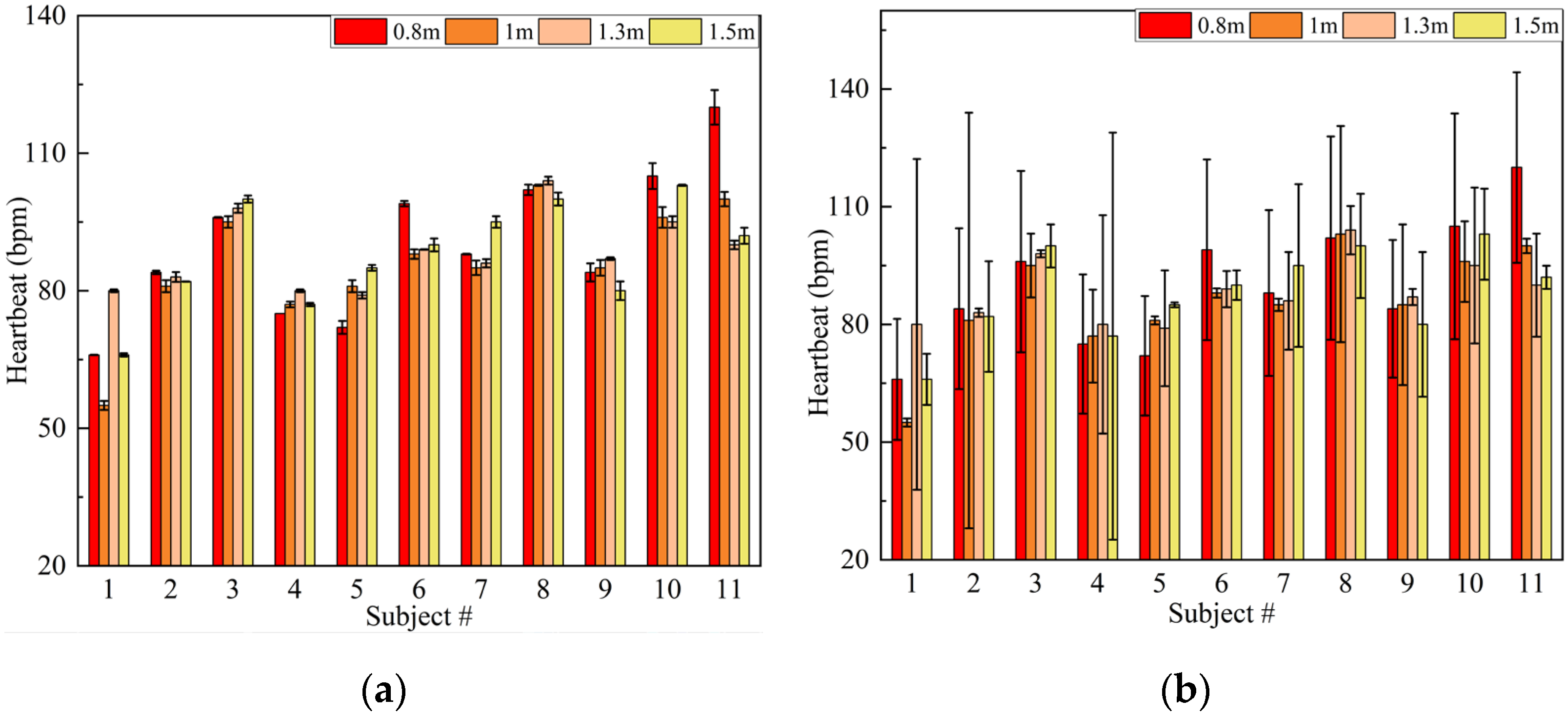
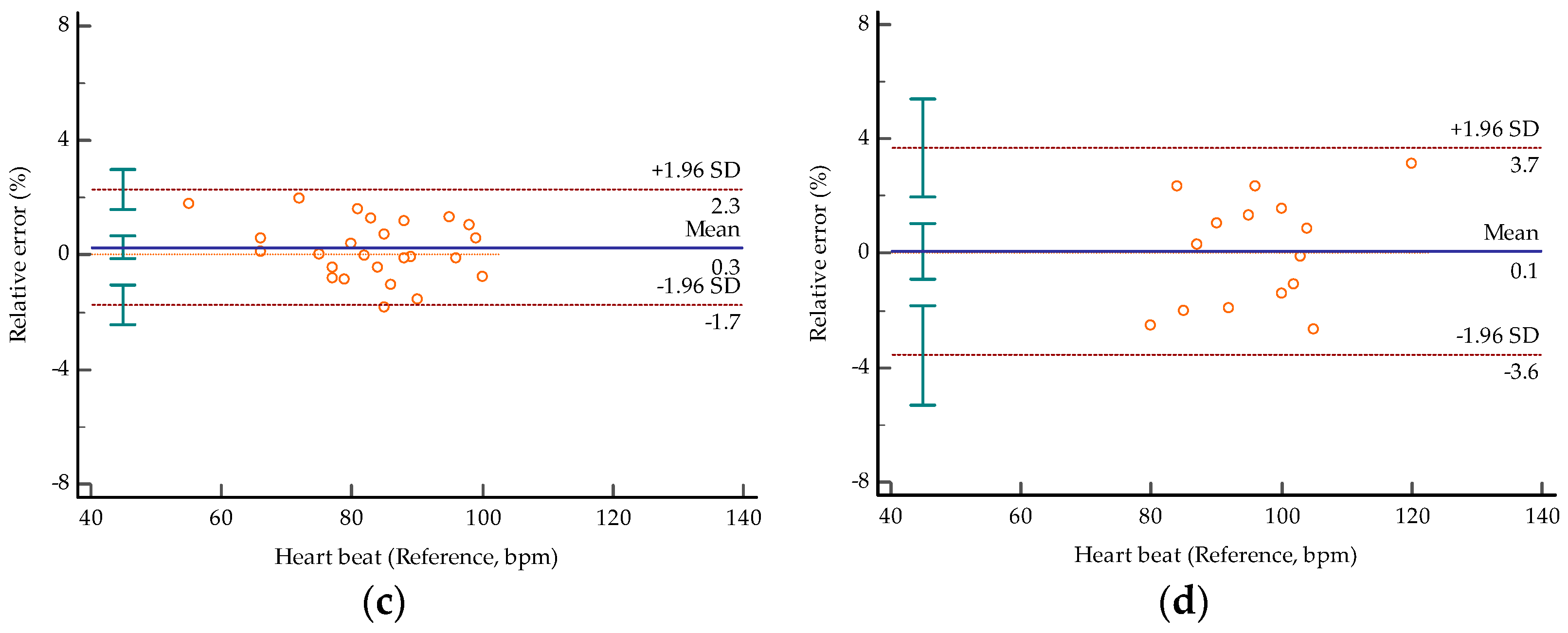
4.3. Accuracy Analysis
5. Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Szczepaniak, Z.R.; Łuszczyk, M. Non-contact Breath Sensor Based on a Doppler Detector. WIT Trans. Model. Simul. 2011, 51, 453–460. [Google Scholar]
- Aardal, Ø.; Paichard, Y.; Brovoll, S.; Berger, T.; Lande, T.S.; Hamran, S.E. Physical Working Principles of Medical Radar. Phys. Work. Princ. Med. Radar 2013, 60, 1142–1149. [Google Scholar] [CrossRef] [PubMed]
- Ahmad, A.; Roh, J.C.; Wang, D.; Dubey, A. Vital signs monitoring of multiple people using a FMCW millimeter-wave sensor. In Proceedings of the 2018 IEEE Radar Conference (RadarConf18), Oklahoma City, OK, USA, 23–27 April 2018. [Google Scholar]
- Gu, C. Short-range noncontact sensors for healthcare and other emerging applications: A review. Sensors 2016, 16, 1169. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Topfer, F.; Oberhammer, J. Millimeter-Wave Tissue Diagnosis: The Most Promising Fields for Medical Applications. IEEE Microw. Mag. 2015, 16, 97–113. [Google Scholar] [CrossRef]
- Zito, D.; Pepe, D. Monitoring respiratory pattern in adult and infant via contactless detection of thorax and abdomen movements through SoC UWB pulse radar sensor. In Proceedings of the 2014 IEEE Topical Conference on Biomedical Wireless Technologies, Networks, and Sensing Systems (BioWireleSS), Newport Beach, CA, USA, 19–23 January 2014. [Google Scholar]
- Peng, Z.; Muñoz-Ferreras, J.M.; Tang, Y.; Liu, C.; Gómez-García, R.; Ran, L.; Li, C. A Portable FMCW Interferometry Radar with Programmable Low-IF Architecture for Localization, ISAR Imaging, and Vital Sign Tracking. IEEE Trans. Microw. Theory Tech. 2017, 65, 1334–1344. [Google Scholar] [CrossRef]
- Hasch, J.; Topak, E.; Schnabel, R.; Zwick, T.; Weigel, R.; Waldschmidt, C. Millimeter-Wave Technology for Automotive Radar Sensors in the 77 GHz Frequency Band. IEEE Trans. Microw. Theory Tech. 2012, 60, 845–860. [Google Scholar] [CrossRef]
- Vodai, T.K.; Oleksak, K.; Kvelashvili, T.; Foroughian, F.; Kilic, O. Enhancement of Remote Vital Sign Monitoring Detection Accuracy Using Multiple-Input Multiple-Output 77 GHz FMCW Radar. IEEE J. Electromagn. RF Microw. Med. Biol. 2022, 6, 111–122. [Google Scholar]
- Yang, Z.K.; Shi, H.; Zhao, S.; Huang, X.D. Vital Sign Detection during Large-Scale and Fast Body Movements Based on an Adaptive Noise Cancellation Algorithm Using a Single Doppler Radar Sensor. Sensors 2020, 20, 4183. [Google Scholar] [CrossRef]
- Choi, H.-I.; Song, W.-J.; Song, H.; Shin, H.-C. Improved Heartbeat Detection by Exploiting Temporal Phase Coherency in FMCW Radar. IEEE Access 2021, 9, 163654–163664. [Google Scholar] [CrossRef]
- Ji, S.; Wen, H.; Wu, J.; Zhang, Z.; Zhao, K. Systematic Heartbeat Monitoring using a FMCW mm-Wave Radar. In Proceedings of the 2021 IEEE International Conference on Consumer Electronics and Computer Engineering (ICCECE), Guangzhou, China, 15–17 January 2021. [Google Scholar]
- Arsalan, M.; Santra, A.; Will, C. Improved Contactless Heartbeat Estimation in FMCW Radar via Kalman Filter Tracking. IEEE Sens. Lett. 2020, 4, 1–4. [Google Scholar] [CrossRef]
- Xiang, M.; Ren, W.; Li, W.; Xue, Z. High-Precision Vital Signs Detection Method Based on Spectrum Refinement and Extended DCMA. J. Beijing Inst. Technol. 2022, 31, 101–111. [Google Scholar]
- Alizadeh, M.; Shaker, G.; Almeida, J.D.; Morita, P.P.; Safavi-Naeini, S. Remote Monitoring of Human Vital Signs using mm-Wave FMCW Radar. IEEE Access 2019, 7, 54958–54968. [Google Scholar] [CrossRef]
- Wang, J.; Wang, X.; Chen, L.; Huangfu, J.; Li, C.; Ran, L. Noncontact Distance and Amplitude-Independent Vibration Measurement Based on an Extended DACM Algorithm. IEEE Trans. Instrum. Meas. 2014, 63, 145–153. [Google Scholar] [CrossRef]
- Kopsinis, Y.; Mclaughlin, S. Development of EMD-Based Denoising Methods Inspired by Wavelet Thresholding. IEEE Trans. Signal Process. 2009, 57, 1351–1362. [Google Scholar] [CrossRef]
- Dragomiretskiy, K.; Zosso, D. Variational Mode Decomposition. IEEE Trans. Signal Process. Publ. IEEE Signal Process. Soc. 2014, 62, 531–544. [Google Scholar] [CrossRef]
- Wang, C.; Feng, Y. Time Series Denoising Based on VMD Wiener Filter. Control Theory Appl. 2022, 41, 9–13. [Google Scholar]
- Huang, X.; Yin, Y.; Liang, C. Research on human vital sign signal extraction based on MEEMD and apFFT. Mod. Electron. Tech. 2020, 43, 30–34. [Google Scholar]
- Wang, S.; Pohl, A.; Jaeschke, T.; Czaplik, M.; Pohl, N. A novel ultra-wideband 80 GHz FMCW radar system for contactless monitoring of vital signs. In Proceedings of the 2015 37th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Milan, Italy, 25–29 August 2015. [Google Scholar]
- Li, C.; Lin, J. Random body movement cancellation in doppler radar vital sign detection. IEEE Trans. Microw. Theory Tech. 2008, 56, 3143–3152. [Google Scholar]
- Gu, C.; Wang, G.; Li, Y.; Inoue, T. A hybrid radar-camera sensing system with phase compensation for random body movement cancellation in doppler vital sign detection. IEEE Trans. Microw. Theory Tech. 2013, 61, 4678–4688. [Google Scholar] [CrossRef]
- Yin, W.; Yang, X.; Lin, Z.; Oki, E. ECG monitoring system integrated with IR-UWB radar based on CNN. IEEE Access 2016, 4, 6344–6351. [Google Scholar] [CrossRef]
- Li, J. Human Vital Signs and Multi-targets Detection Based on Convolutional Neural Network. Master’s Thesis, Beijing University of Post and Telecommunications, Beijing, China, 2019. [Google Scholar]
- Tang, C.; Lu, J.; Jie, L. Non-contact Heart Rate Monitoring by Combining Convolutional Neural Network Skin Detection and Remote Photoplethysmography via a Low-Cost Camera. In Proceedings of the 2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition Workshops (CVPRW), Salt Lake City, UT, USA, 18–22 June 2018. [Google Scholar]
- Krej, M.; Osuch, T.; Anuszkiewicz, A.; Stopinski, S.; Anders, K.; Matuk, K. Deep learning-based method for the continuous detection of heart rate in signals from a multi-fiber Bragg grating sensor compatible with magnetic resonance imaging. Biomed. Opt. Express 2021, 12, 7790–7806. [Google Scholar] [CrossRef] [PubMed]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Chirp starting frequency, | 77 GHz |
| Chirp duration, | 50 μs |
| Chirp slope, K | 80 MHz/μs |
| Idle time, | 7 μs |
| ADC sampling rate, | 6.4 Msps |
| Frame period, | 50 ms |
| Sample points number in each chirp, | 256 |
| Transmitting antenna | |
| Receiving antenna | |
| Output power | 12.5 dBm |
| Group # | Subject # | Basic Health Information | Distance (m) | Reference Value (bpm) | |||
|---|---|---|---|---|---|---|---|
| Sex | Age | SD | Breathing | Heartbeat | |||
| 1 | 1 | Female | 21 | Normal breathing and heart rate | 0.8 | 11 | 66 |
| 1 | 21 | 55 | |||||
| 1.3 | 18 | 80 | |||||
| 1.5 | 26 | 66 | |||||
| 2 | Female | 24 | Normal breathing and heart rate | 0.8 | 20 | 84 | |
| 1 | 15 | 81 | |||||
| 1.3 | 25 | 83 | |||||
| 1.5 | 18 | 82 | |||||
| 3 | Male | 31 | Normal breathing and heart rate | 0.8 | 15 | 96 | |
| 1 | 17 | 95 | |||||
| 1.3 | 14 | 98 | |||||
| 1.5 | 24 | 100 | |||||
| 4 | Female | 24 | Normal breathing and heart rate | 0.8 | 16 | 75 | |
| 1 | 13 | 77 | |||||
| 1.3 | 18 | 80 | |||||
| 1.5 | 18 | 77 | |||||
| 5 | Female | 26 | Normal breathing and heart rate | 0.8 | 11 | 72 | |
| 1 | 20 | 81 | |||||
| 1.3 | 21 | 79 | |||||
| 1.5 | 18 | 84 | |||||
| 6 | Female | 22 | Normal breathing and heart rate | 0.8 | 13 | 99 | |
| 1 | 24 | 88 | |||||
| 1.3 | 24 | 89 | |||||
| 1.5 | 21 | 90 | |||||
| 7 | Male | 24 | Normal breathing and heart rate | 0.8 | 21 | 88 | |
| 1 | 19 | 85 | |||||
| 1.3 | 20 | 86 | |||||
| 1.5 | 17 | 95 | |||||
| 2 | 1 | Female | 23 | Rapid heartbeat with deliberately rapid breathing in some cases | 0.8 | 22 | 102 |
| 1 | 31 | 103 | |||||
| 1.3 | 18 | 104 | |||||
| 1.5 | 18 | 100 | |||||
| 2 | Male | 24 | Normal heartbeat with deliberately rapid breathing in some cases | 0.8 | 26 | 84 | |
| 1 | 23 | 85 | |||||
| 1.3 | 34 | 87 | |||||
| 1.5 | 31 | 82 | |||||
| 3 | Male | 24 | Rapid heartbeat and deliberately rapid breathing in some cases | 0.8 | 21 | 108 | |
| 1 | 29 | 94 | |||||
| 1.3 | 35 | 95 | |||||
| 1.5 | 29 | 103 | |||||
| 4 | Male | 29 | Normal breathing with deliberately rapid heartbeat in some cases | 0.8 | 15 | 120 | |
| 1 | 17 | 100 | |||||
| 1.3 | 25 | 90 | |||||
| 1.5 | 24 | 92 | |||||
| Subject # | Range (m) | Reference (bpm) | Measurement (Hz) | Judgment (Hz) | Relative Error | |
|---|---|---|---|---|---|---|
| FFT-CZT | Peek-Seeking | |||||
| 1 | 0.8 | 66 | 1.0989 | 1.0547 | 1.0989 | 0.1% |
| 1.3 | 80 | 1.8732 | 1.3281 | 1.3281 | 1.27% | |
| 2 | 0.8 | 84 | 3.5245 | 1.4063 | 1.4063 | 0.45% |
| 1.3 | 83 | 1.3657 | 1.4063 | 1.3657 | 0.37% | |
| 3 | 1.3 | 98 | 1.6165 | 1.6016 | 1.6165 | 1.03% |
| 1.5 | 100 | 1.9058 | 1.6797 | 1.6797 | 0.78% | |
| 4 | 1 | 77 | 1.2939 | 1.3672 | 1.2939 | 0.82% |
| 1.3 | 80 | 2.4911 | 1.3281 | 1.3281 | 0.39% | |
| 5 | 0.8 | 72 | 1.1765 | 1.25 | 1.1765 | 1.96% |
| 1.5 | 84 | 2.7039 | 1.4063 | 1.4063 | 0.45% | |
| 6 | 0.8 | 99 | 1.9977 | 1.6404 | 1.6404 | 0.58% |
| 1 | 88 | 1.4493 | 1.4453 | 1.4493 | 1.18% | |
| 7 | 0.8 | 88 | 1.4682 | 1.4844 | 1.4682 | 0.11% |
| 1.5 | 95 | 1.2390 | 1.5625 | 1.5625 | 1.32% | |
| Subject # | Range (m) | Reference (bpm) | Measurement (Hz) | Judgment (Hz) | Relative Error | |
|---|---|---|---|---|---|---|
| FFT-CZT | Peek-Seeking | |||||
| 1 | 0.8 | 102 | 2.7029 | 1.7188 | 1.7188 | 1.11% |
| 1.5 | 100 | 1.6901 | 1.4844 | 1.6901 | 1.41% | |
| 2 | 1 | 87 | 1.1084 | 1.4453 | 1.4453 | 0.32% |
| 1.5 | 82 | 1.7166 | 1.3672 | 1.3672 | 0.04% | |
| 3 | 0.8 | 108 | 0.9375 | 1.7969 | 1.7969 | 0.17% |
| 1 | 94 | 2.3318 | 1.5625 | 1.5625 | 0.27% | |
| 4 | 0.8 | 120 | 1.9373 | 1.4844 | 1.9373 | 3.14% |
| 1.3 | 90 | 2.4292 | 1.4844 | 1.4844 | 1.04% | |
| Subject # | Breathing Signal | Heartbeat Signal | ||
|---|---|---|---|---|
| 1 | −3.1784 | −2.7656 | −0.8765 | 0.3583 |
| 2 | 7.8689 | 8.8274 | −2.8444 | −1.0186 |
| 3 | 0.1020 | 4.4074 | −3.0217 | −1.7594 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xiang, M.; Ren, W.; Li, W.; Xue, Z.; Jiang, X. High-Precision Vital Signs Monitoring Method Using a FMCW Millimeter-Wave Sensor. Sensors 2022, 22, 7543. https://doi.org/10.3390/s22197543
Xiang M, Ren W, Li W, Xue Z, Jiang X. High-Precision Vital Signs Monitoring Method Using a FMCW Millimeter-Wave Sensor. Sensors. 2022; 22(19):7543. https://doi.org/10.3390/s22197543
Chicago/Turabian StyleXiang, Mingxu, Wu Ren, Weiming Li, Zhenghui Xue, and Xinyue Jiang. 2022. "High-Precision Vital Signs Monitoring Method Using a FMCW Millimeter-Wave Sensor" Sensors 22, no. 19: 7543. https://doi.org/10.3390/s22197543
APA StyleXiang, M., Ren, W., Li, W., Xue, Z., & Jiang, X. (2022). High-Precision Vital Signs Monitoring Method Using a FMCW Millimeter-Wave Sensor. Sensors, 22(19), 7543. https://doi.org/10.3390/s22197543