
Development of Low Hysteresis, Linear Weft-Knitted Strain Sensors for Smart Textile Applications




Abstract
:1. Introduction
- Next, the base fabric in which the sensor yarns are embedded needs to be fully elastic. If not, the sensor will not respond elastically and will be prone to show time lag and hysteresis effects [14].
- Rib structures as knit design allow for stretching abilities up to 100% and are therefore potential strong candidates for knitted strain sensors [17].
- Sensors should preferably be rectangular with aspect rations between 24:1 to 77:1 [17].
2. Materials and Methods
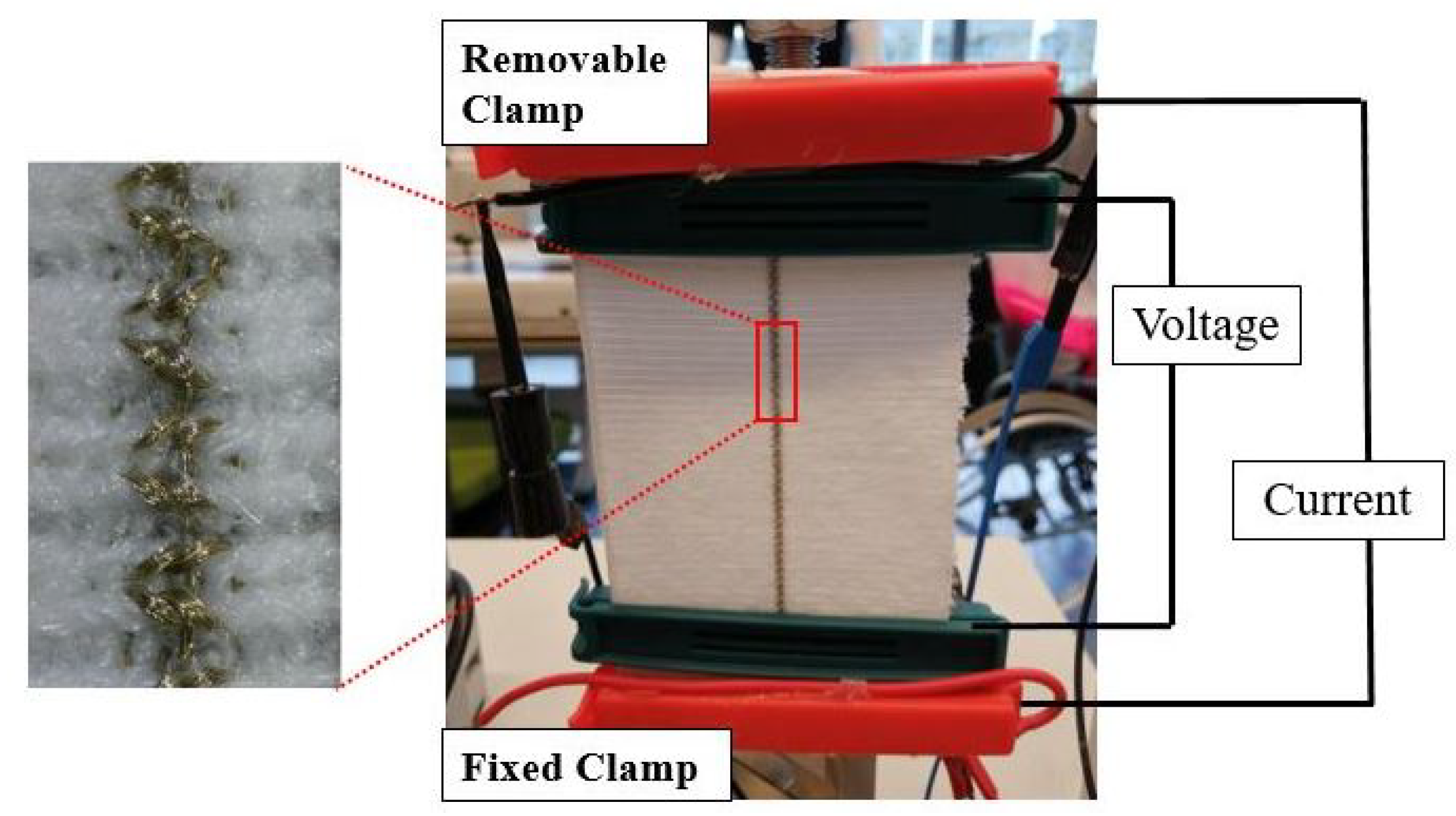
2.1. Resistance-Strain Testing Procedure
2.2. Electromechanical Properties
3. Results
3.1. Electromechanical Performance Analysis of a Knitted Strain Sensor
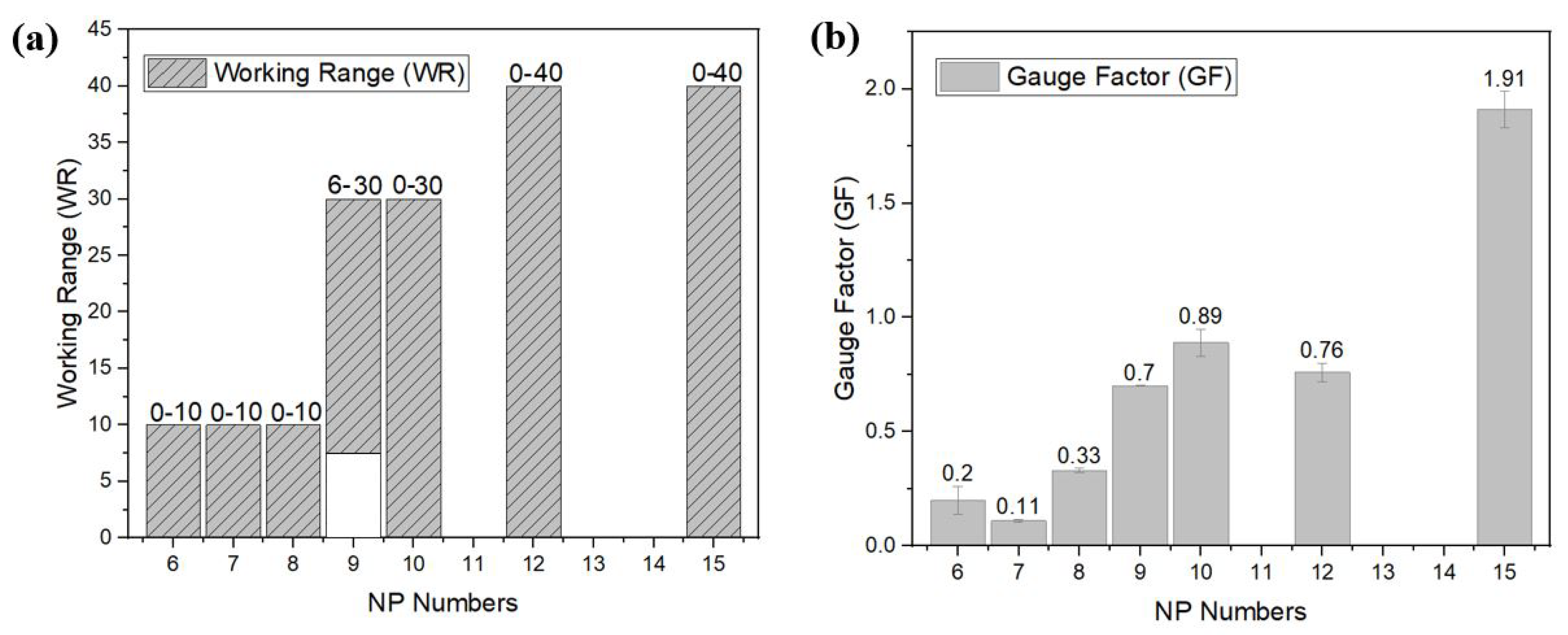
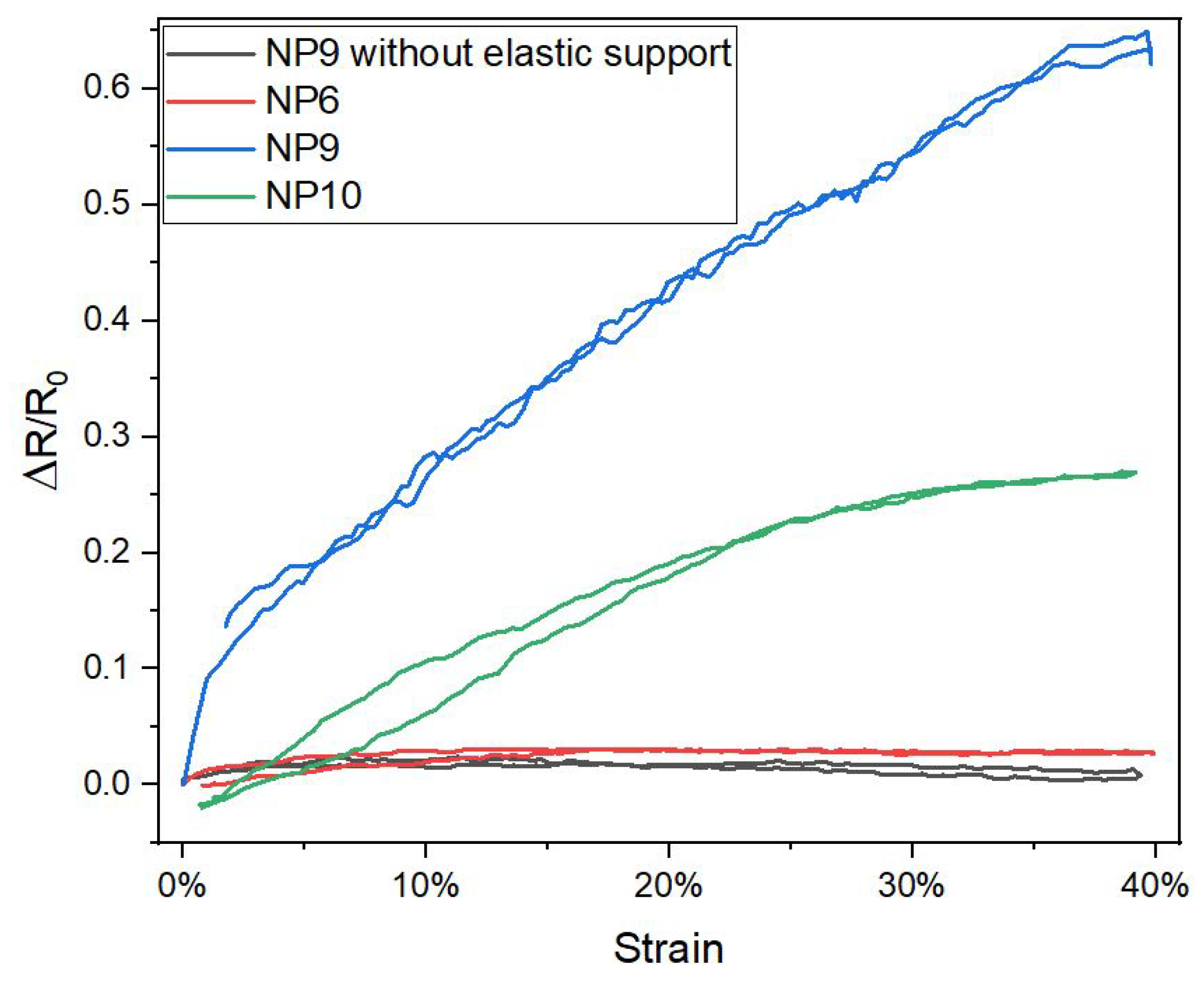
3.2. The Effect of Knit Density (NP Number) on the Sensor Performance
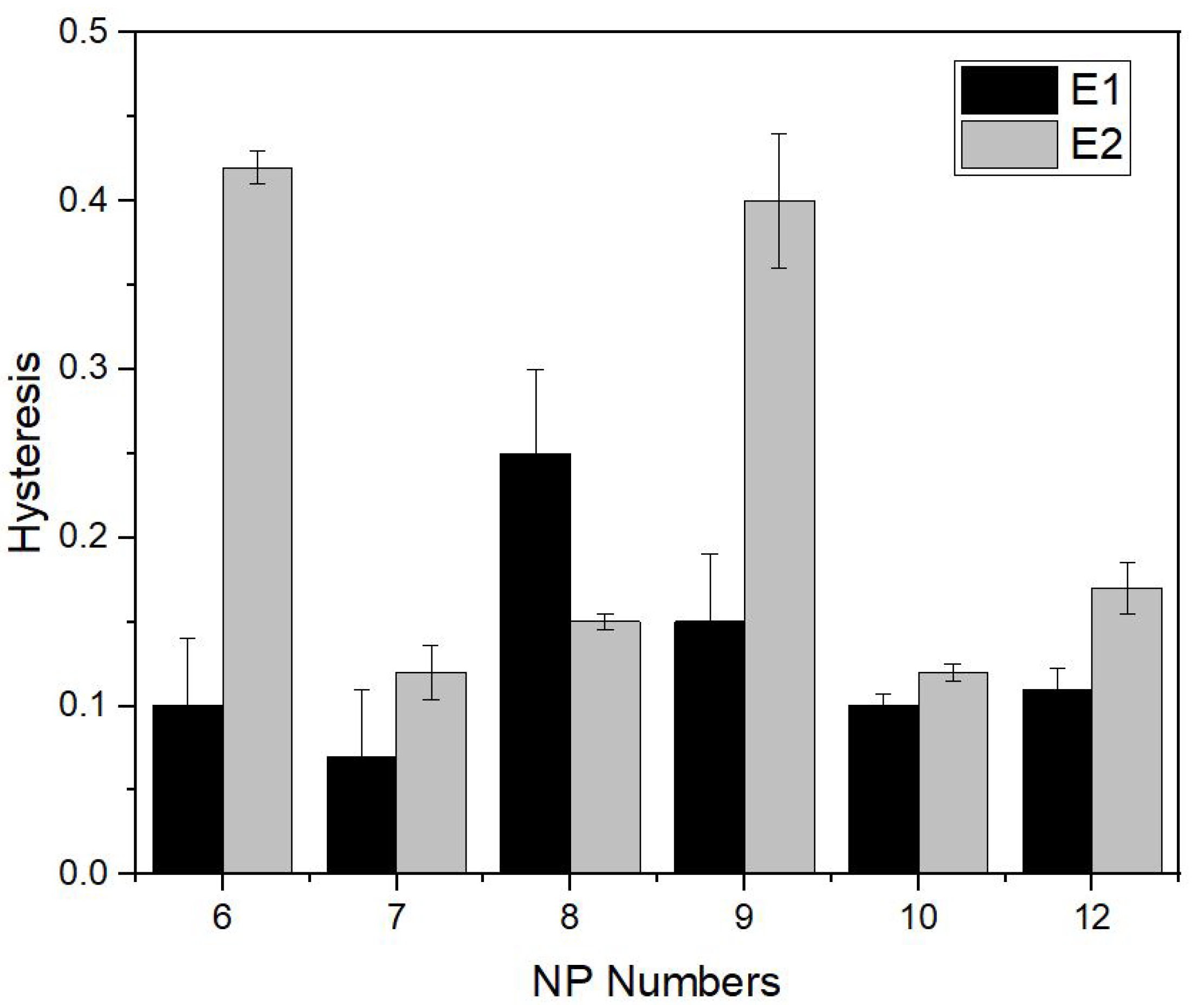
3.3. The Effect of an Elastic Yarn Type on Sensor Performance
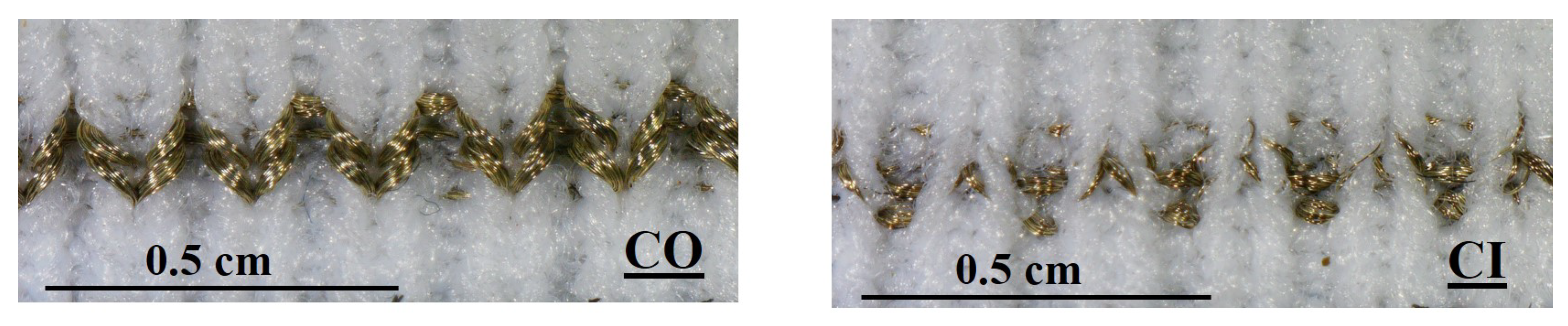
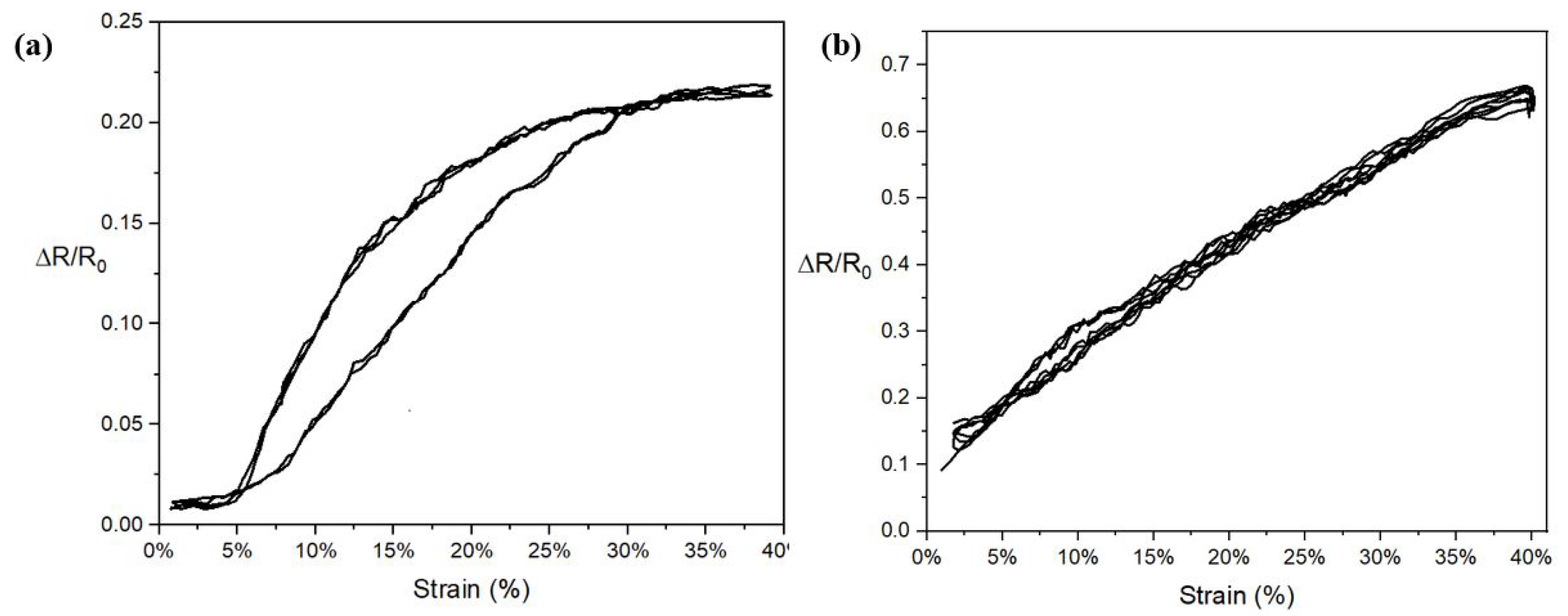
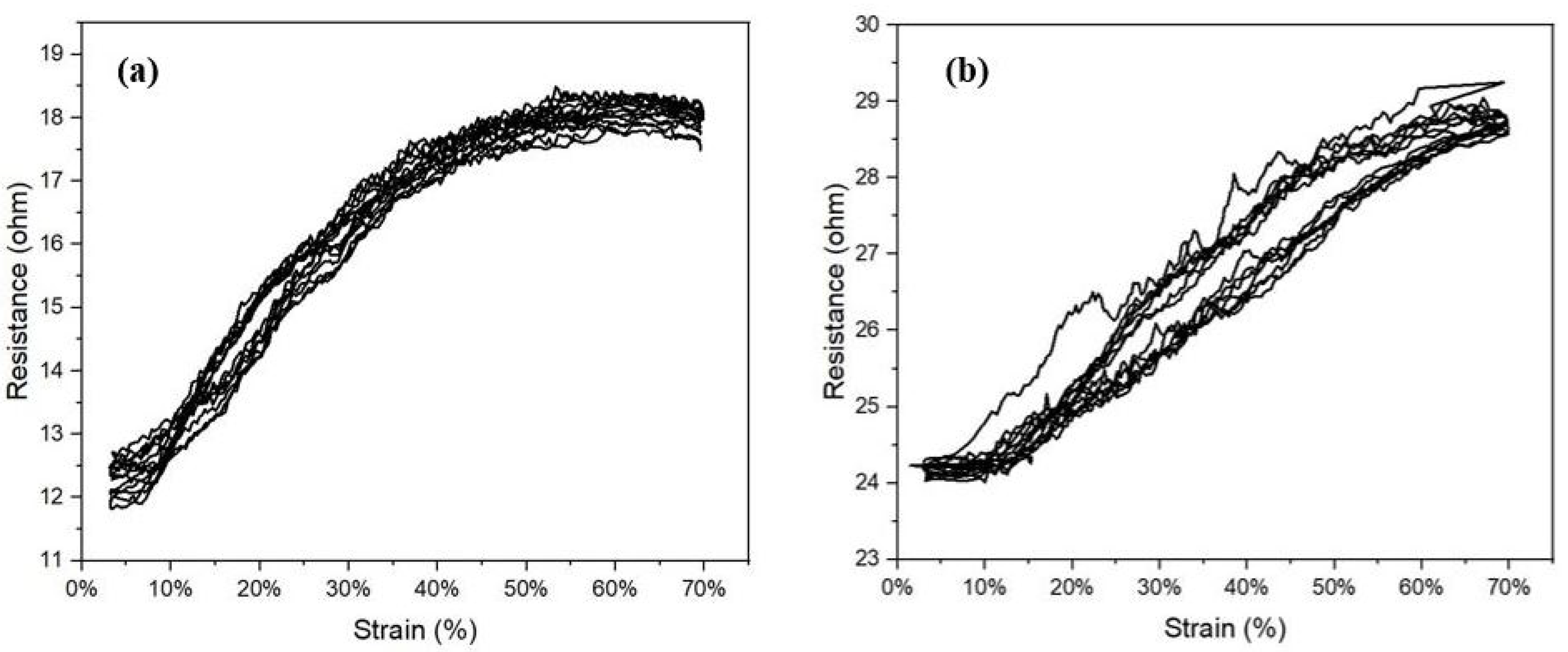
3.4. The Effect of Conductive Yarn Configuration on the Sensor Performance
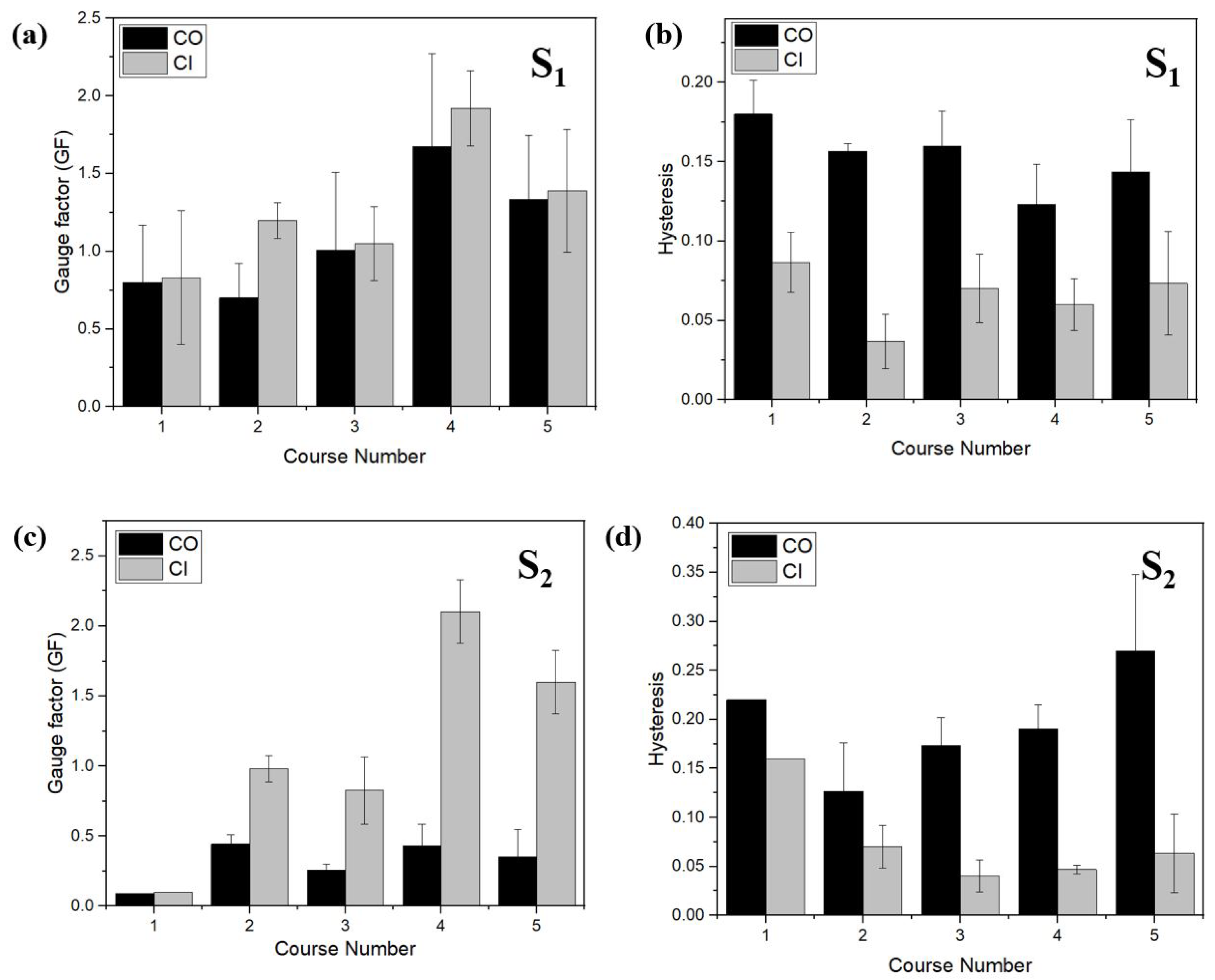
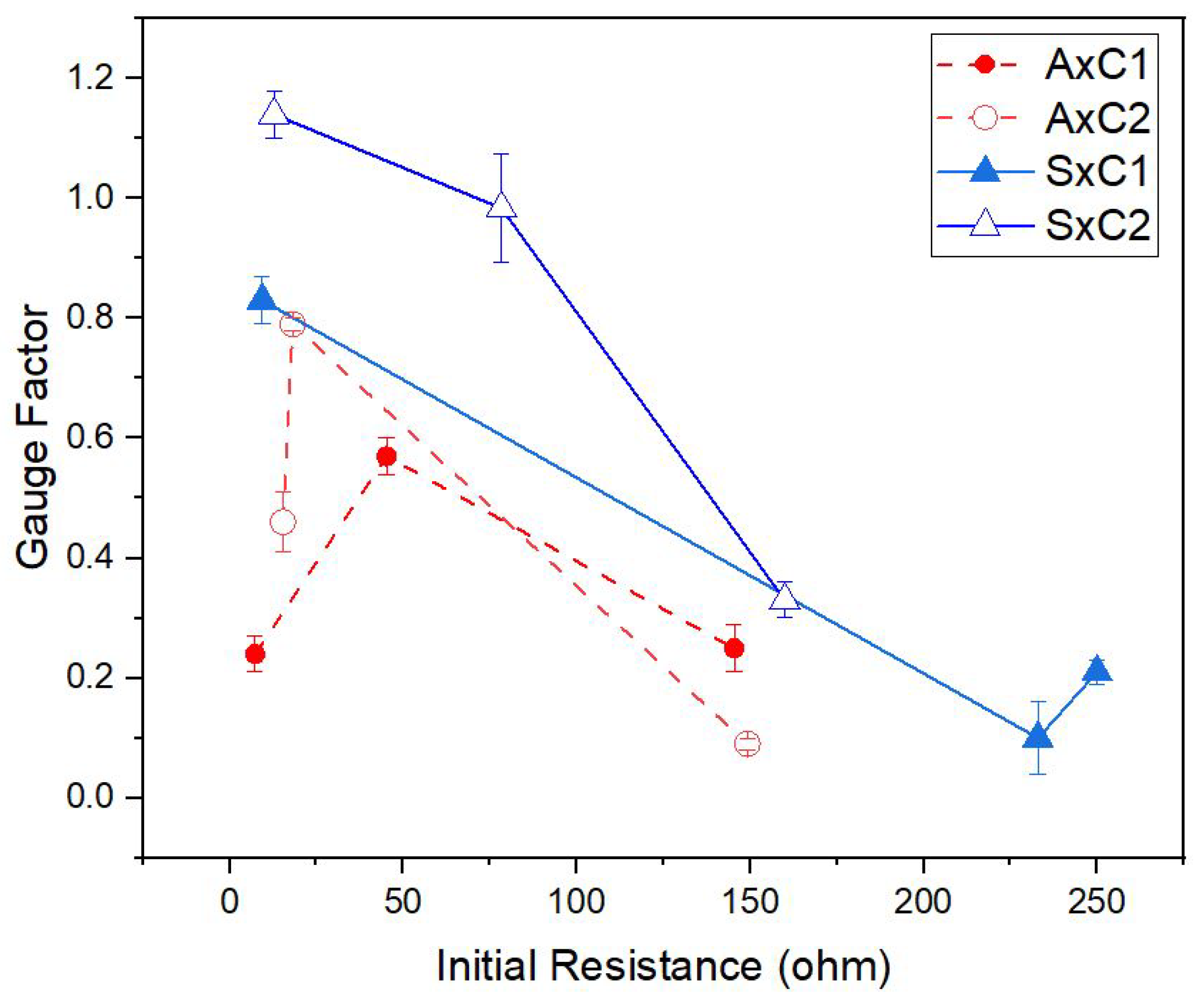
3.5. The Effect of Conductive Yarn Type and Conductive Course Number on Sensor Performance
4. Discussion
5. Conclusions
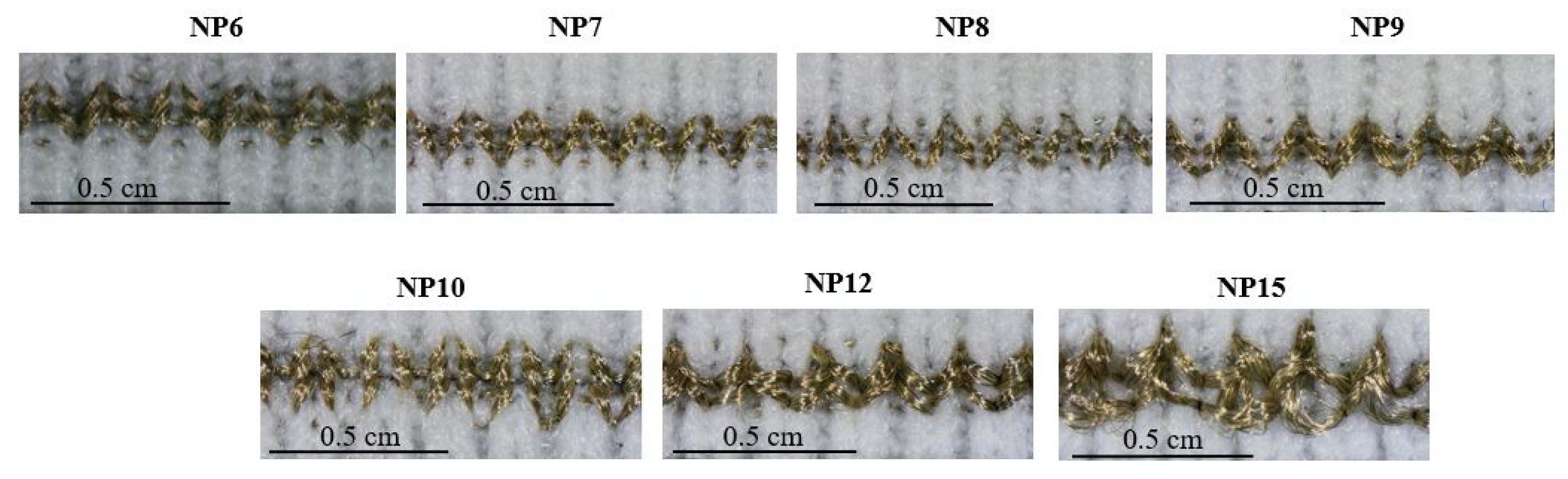
- The separation of the loops within the knitted structure produced with lower NPs such as 6, 7 and 8 cannot be achieved directly because of the tightness of the samples. At higher NP values of 12 and 15, the sensor starts to respond at higher strain values thanks to an improved elastic response for strains up to 40%.
- A manufacturing technique in which the sensor properties, especially the hysteresis values, can be reduced and controlled in knitted sensors has been reported for the first time. By positioning the conductive yarns inside the 1 × 1 rib structure, a knitted strain sensor with linear performance and a gauge factor of 1.19 and negligible hysteresis of 0.03 was developed.
- The effect of yarn positioning on different types of conductive yarns in terms of hysteresis was also proved. For both S and S yarns, the hysteresis values have decreased for different conductive course numbers. The lowest hysteresis values were achieved for a 2-course sample of S yarn and 3- or 4- course samples of S yarn.
- The performance of sensors made with different conductive yarns was evaluated, and those with lower initial resistance reported higher gauge factors for S-type yarns.
- The highest sensitivity values can be achieved when the conductive yarns have comparable thickness compared to the elastic yarn. Thinner yarns result in poor sensing performance.
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Lee, H.J.; Hwang, S.H.; Yoon, H.N.; Lee, W.K.; Park, K.S. Heart rate variability monitoring during sleep based on capacitively coupled textile electrodes on a bed. Sensors 2015, 15, 11295–11311. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Niu, B.; Hua, T.; Hu, H.; Xu, B.; Tian, X.; Chan, K.; Chen, S. A highly durable textile-based sensor as a human-worn material interface for long-term multiple mechanical deformation sensing. J. Mater. Chem. C 2019, 7, 14651–14663. [Google Scholar] [CrossRef]
- Maity, S.; Chatterjee, A. Conductive polymer-based electro-conductive textile composites for electromagnetic interference shielding: A review. J. Ind. Text. 2018, 47, 2228–2252. [Google Scholar] [CrossRef]
- Amjadi, M.; Kyung, K.U.; Park, I.; Sitti, M. Stretchable, skin-mountable, and wearable strain sensors and their potential applications: A review. Adv. Funct. Mater. 2016, 26, 1678–1698. [Google Scholar] [CrossRef]
- Ma, R.; Lee, J.; Choi, D.; Moon, H.; Baik, S. Knitted fabrics made from highly conductive stretchable fibers. Nano Lett. 2014, 14, 1944–1951. [Google Scholar] [CrossRef]
- Molinaro, N.; Massaroni, C.; Presti, D.L.; Saccomandi, P.; Di Tomaso, G.; Zollo, L.; Perego, P.; Andreoni, G.; Schena, E. Wearable textile based on silver plated knitted sensor for respiratory rate monitoring. In Proceedings of the 40th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Honolulu, HI, USA, 17–21 July 2018; pp. 2865–2868. [Google Scholar]
- Park, S.Y.; Lee, J.H. Machine Embroidered Sensors for Limb Joint Movement-Monitoring Smart Clothing. Sensors 2021, 21, 949. [Google Scholar] [CrossRef]
- Tangsirinaruenart, O.; Stylios, G. A novel textile stitch-based strain sensor for wearable end users. Materials 2019, 12, 1469. [Google Scholar] [CrossRef] [Green Version]
- Zhao, K.; Niu, W.; Zhang, S. Highly stretchable, breathable and negative resistance variation textile strain sensor with excellent mechanical stability for wearable electronics. J. Mater. Sci. 2020, 55, 2439–2453. [Google Scholar] [CrossRef]
- Atalay, O.; Kennon, W.R.; Husain, M.D. Textile-based weft knitted strain sensors: Effect of fabric parameters on sensor properties. Sensors 2013, 13, 11114–11127. [Google Scholar] [CrossRef]
- Larrabee, W.F., Jr. A finite element model of skin deformation. I. Biomechanics of skin and soft tissue: A review. Laryngoscope 1986, 96, 399–405. [Google Scholar]
- Gibbs, P.T.; Asada, H. Wearable conductive fiber sensors for multi-axis human joint angle measurements. J. Neuroeng. Rehabil. 2005, 2, 1–18. [Google Scholar] [CrossRef] [PubMed]
- Atalay, O.; Tuncay, A.; Husain, M.D.; Kennon, W.R. Comparative study of the weft-knitted strain sensors. J. Ind. Text. 2017, 46, 1212–1240. [Google Scholar] [CrossRef]
- Liang, A.; Stewart, R.; Bryan-Kinns, N. Analysis of sensitivity, linearity, hysteresis, responsiveness, and fatigue of textile knit stretch sensors. Sensors 2019, 19, 3618. [Google Scholar] [CrossRef] [Green Version]
- Raji, R.K.; Miao, X.; Zhang, S.; Li, Y.; Wan, A. Influence of rib structure and elastic yarn type variations on textile piezoresistive strain sensor characteristics. Fibres Text. East. Eur. 2018, 26, 24–31. [Google Scholar] [CrossRef]
- Xie, J.; Long, H.; Miao, M. High sensitivity knitted fabric strain sensors. Smart Mater. Struct. 2016, 25, 105008. [Google Scholar] [CrossRef]
- Raji, R.K.; Miao, X.; Zhang, S.; Li, Y.; Wan, A.; Boakye, A. Knitted piezoresistive strain sensor performance, impact of conductive area and profile design. J. Ind. Text. 2020, 50, 616–634. [Google Scholar] [CrossRef]
- Jansen, K. Performance evaluation of knitted and stitched textile strain sensors. Sensors 2020, 20, 7236. [Google Scholar] [CrossRef] [PubMed]
- Isaia, C.; McMaster, S.; McNally, D. The effect of washing on the electrical performance of knitted textile strain sensors for quantifying joint motion. J. Ind. Text. 2022, 51, 8528S–8548S. [Google Scholar] [CrossRef]
- Chia, P.Z.; Gupta, U.; Tan, Y.Y.; Lau, J.L.; Ahmed, A.; Soh, G.S.; Low, H.Y. Effect of Stitch Pattern on the Electrical Properties of Wale-wise Knitted Strain Sensors and Interconnects. In Proceedings of the IEEE Sensors, Avignon, France, 28–31 March 2021; pp. 1–4. [Google Scholar]
- Li, Y.; Miao, X.; Chen, J.Y.; Jiang, G.; Liu, Q. Sensing performance of knitted strain sensor on two-dimensional and three-dimensional surfaces. Mater. Des. 2021, 197, 109273. [Google Scholar] [CrossRef]
- Dupler, E.; Dunne, L.E. Effects of the textile-sensor interface on stitched strain sensor performance. In Proceedings of the 23rd International Symposium on Wearable Computers, London, UK, 9–12 September 2019; pp. 45–53. [Google Scholar]
- Xie, J.; Long, H. Investigation on the relation between structure parameters and sensing properties of knitted strain sensor under strip biaxial elongation. J. Eng. Fibers Fabr. 2015, 10, 166–178. [Google Scholar] [CrossRef]
- Arbataitis, E.; Mikucioniene, D.; Halavska, L. Flexible Theoretical Calculation of Loop Length and Area Density of Weft-Knitted Structures: Part I. Materials 2021, 14, 3059. [Google Scholar] [CrossRef]
- Tohidi, S.D.; Zille, A.; Catarino, A.P.; Rocha, A.M. Effects of base fabric parameters on the electro-mechanical behavior of piezoresistive knitted sensors. IEEE Sensors J. 2018, 18, 4529–4535. [Google Scholar] [CrossRef] [Green Version]
- Ankhili, A.; Zaman, S.U.; Tao, X.; Cochrane, C.; Koncar, V.; Coulon, D. How to connect conductive flexible textile tracks to skin electrocardiography electrodes and protect them against washing. IEEE Sensors J. 2019, 19, 11995–12002. [Google Scholar] [CrossRef]
- Li, L.; Liu, S.; Ding, F.; Hua, T.; Au, W.M.; Wong, K.S. Electromechanical analysis of length-related resistance and contact resistance of conductive knitted fabrics. Text. Res. J. 2012, 82, 2062–2070. [Google Scholar] [CrossRef]
- Ryu, H.; Park, S.; Park, J.J.; Bae, J. A knitted glove sensing system with compression strain for finger movements. Smart Mater. Struct. 2018, 27, 055016. [Google Scholar] [CrossRef]
- Atalay, O.; Kennon, W.R.; Demirok, E. Weft-knitted strain sensor for monitoring respiratory rate and its electro-mechanical modeling. IEEE Sensors J. 2014, 15, 110–122. [Google Scholar] [CrossRef]
- Tognetti, A.; Lorussi, F.; Mura, G.D.; Carbonaro, N.; Pacelli, M.; Paradiso, R.; Rossi, D.D. New generation of wearable goniometers for motion capture systems. J. Neuroeng. Rehabil. 2014, 11, 1–17. [Google Scholar] [CrossRef]
- Oks, A.; Katashev, A.; Litvak, J. Knitted resistive fabric: Properties and applications. Mater. Sci. Text. Cloth. Technol. 2014, 9, 28–33. [Google Scholar] [CrossRef]
- Yang, K.; Song, G.l.; Zhang, L.; Li, L.W. Modelling the electrical property of 1× 1 rib knitted fabrics made from conductive yarns. In Proceedings of the Second International Conference on Information and Computing Science, Manchester, UK, 21–22 May 2009; Volume 4, pp. 382–385. [Google Scholar]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Composition | Coding | Linear Density (Dtex *) | Resistivity (/m) | Manufacturer |
|---|---|---|---|---|
| Silver coated | A1 | 960 | 85 | |
| polyamide/ | A2 | 620 | 150 | Amann |
| polyester hybrid yarn | A3 | 280 | 530 | |
| Silver | S1 | 235 | 600 | |
| plated | S2 | 117 | 1500 | Shieldex |
| polyamide 6 yarn | S3 | 78 | 3500 |
| Parameters | Variations | Section |
|---|---|---|
| NP number | 6, 7, 8, 9, 10, 12 and 15 | Section 3.2 |
| Conductive yarn type | Shieldex (S, S, S) and Amann (A, A, A) | Section 3.5 |
| Conductive course number | 1, 2, 3, 4 and 5 | Section 3.5 |
| Elastic yarn type | Yeoman (E) and Uppingham (E) | Section 3.3 |
| Configuration of the c. yarn | Inside (CI) and Outside (CO) | Section 3.4 |
| NPs | Areal Density (g/m) | Nominal Thickness (mm) | Elastic Modulus (MPa) |
|---|---|---|---|
| 6 | 796 | 1.57 ± 0.02 | 0.26 ± 0.01 |
| 7 | 614 | 1.57 ± 0.03 | 0.24 ± 0.02 |
| 8 | 551 | 1.76 ± 0.01 | 0.21 ± 0.005 |
| 9 | 402 | 1.74 ± 0.01 | 0.15 ± 0.01 |
| 10 | 331 | 1.84 ± 0.01 | 0.12 ± 0.01 |
| 12 | 216 | 2.27 ± 0.005 | 0.06 ± 0.005 |
| 15 | 148 | 2.53 ± 0.005 | 0.03 ± 0.002 |
| Yarn Type | Yarn Thickness (mm) | Gauge Factor CO CI |
|---|---|---|
| A1 | 0.49 | 0.24 0.46 |
| A2 | 0.33 | 0.57 0.79 |
| A3 | 0.27 | 0.25 0.09 |
| S1 | 0.32 | 0.70 1.19 |
| S2 | 0.19 | 0.44 0.98 |
| S3 | 0.16 | 0.21 0.33 |
| Ref. | Knit Type | Conductive Material | Non-Conductive Material | GF | Hysteresis | WR |
|---|---|---|---|---|---|---|
| Atalay (2013) [10] | Interlock | 235 dtex Silver- Nylon | 800 dtex elastic yarn | 3.75 | 0.10 | 10–40% |
| Atalay (2014) [29] | Interlock | Silver-Nylon | 800 dtex elastic yarn | 3.44 | 0.08 | >40% |
| Tognetti (2014) [30] | Intersia | Carbon filled nylon | Lycra | 6.7 | 0.14 | >10% |
| Raji (2018) [15] | 1 × 1 Rib | Silver-Nylon | Nylon covered spandex | 1.25 | - | 32.8 |
| Raji (2018) [15] | 1 × 2 Rib | Silver-Nylon | Nylon covered spandex | 1.50 | - | 25.3 |
| Raji (2018) [15] | 1 × 3 Rib | Silver-Nylon | Nylon covered spandex | 1.60 | - | 31.7 |
| Oks (2014) [31] | Plain | Silver-Nylon | Elastane, Pes, Cotton | 10 | 0.10 | 5–10% |
| Chia (2021) [20] | 1 × 1 Rib | 235 dtex Silver-Nylon | Spandex yarn | 1.36 | - | 20% |
| Yang (2009) [32] | 1 × 1 Rib | Bare SS | - | −1.1 | - | 50% |
| Our Study (2022) | 1 × 1 Rib | 235 dtex Sil-Ny, 600 /m | Nylon- Lycra | 1.19 | 0.03 | 40% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bozali, B.; Ghodrat, S.; Plaude, L.; van Dam, J.J.F.; Jansen, K.M.B. Development of Low Hysteresis, Linear Weft-Knitted Strain Sensors for Smart Textile Applications. Sensors 2022, 22, 7688. https://doi.org/10.3390/s22197688
Bozali B, Ghodrat S, Plaude L, van Dam JJF, Jansen KMB. Development of Low Hysteresis, Linear Weft-Knitted Strain Sensors for Smart Textile Applications. Sensors. 2022; 22(19):7688. https://doi.org/10.3390/s22197688
Chicago/Turabian StyleBozali, Beyza, Sepideh Ghodrat, Linda Plaude, Joris J. F. van Dam, and Kaspar M. B. Jansen. 2022. "Development of Low Hysteresis, Linear Weft-Knitted Strain Sensors for Smart Textile Applications" Sensors 22, no. 19: 7688. https://doi.org/10.3390/s22197688
APA StyleBozali, B., Ghodrat, S., Plaude, L., van Dam, J. J. F., & Jansen, K. M. B. (2022). Development of Low Hysteresis, Linear Weft-Knitted Strain Sensors for Smart Textile Applications. Sensors, 22(19), 7688. https://doi.org/10.3390/s22197688