
Experimental Analysis and Multiscale Modeling of the Dynamics of a Fiber-Optic Coil



Abstract
:1. Introduction
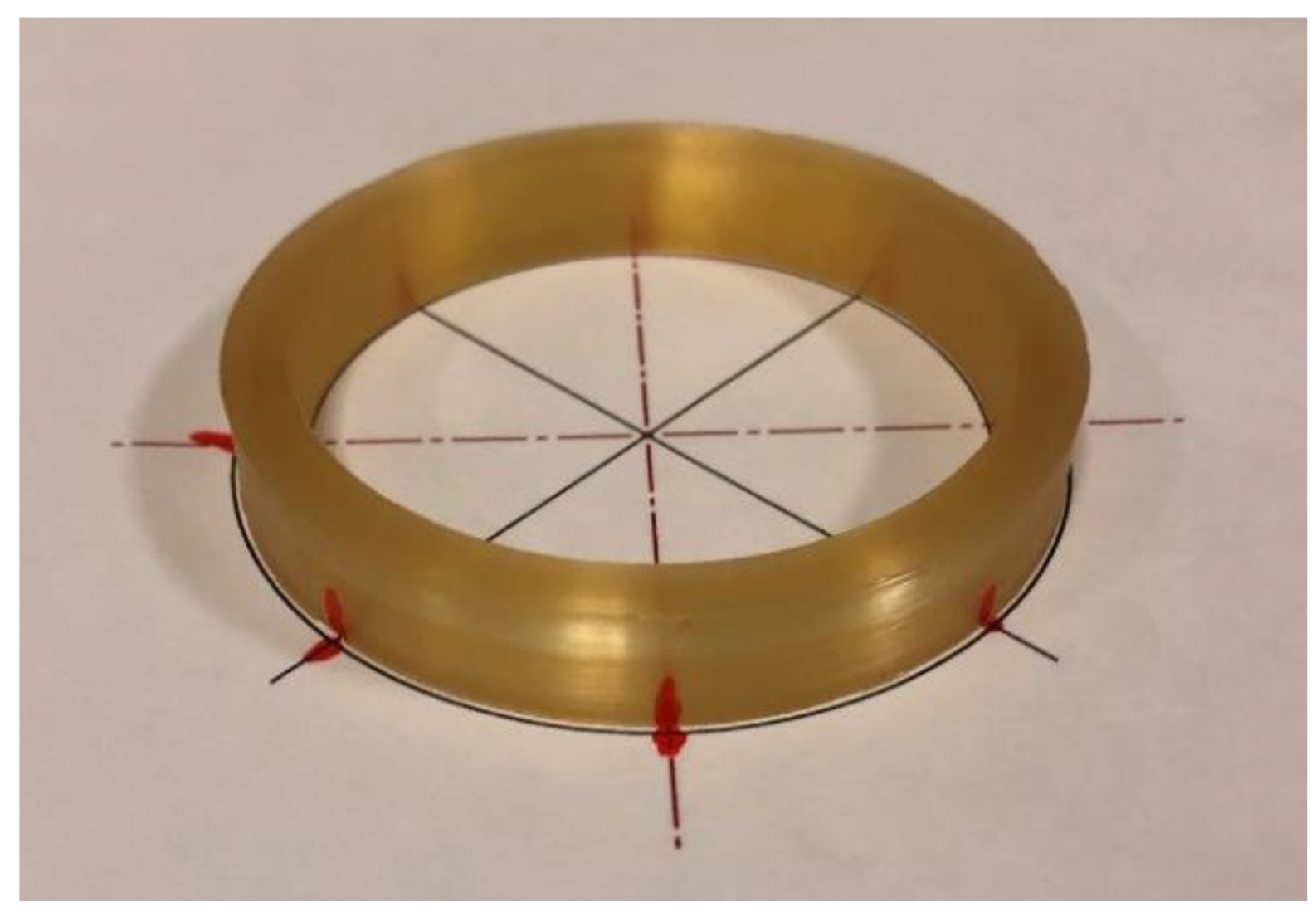
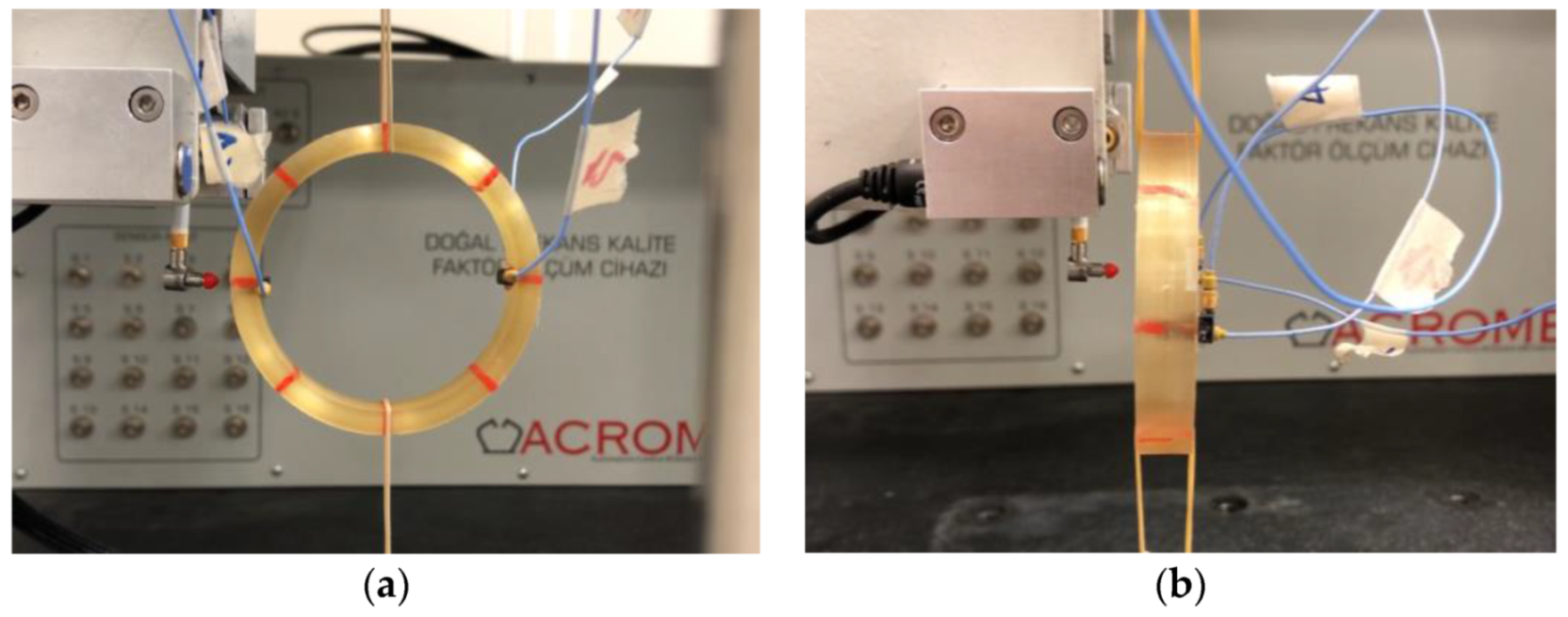
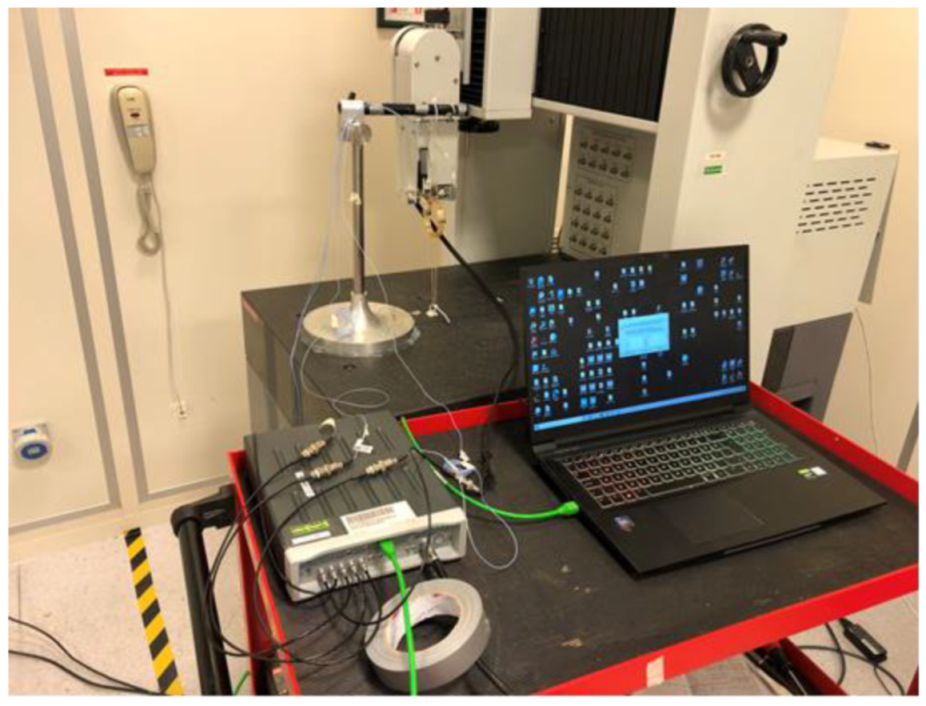
2. Materials and Modal Test Methodology
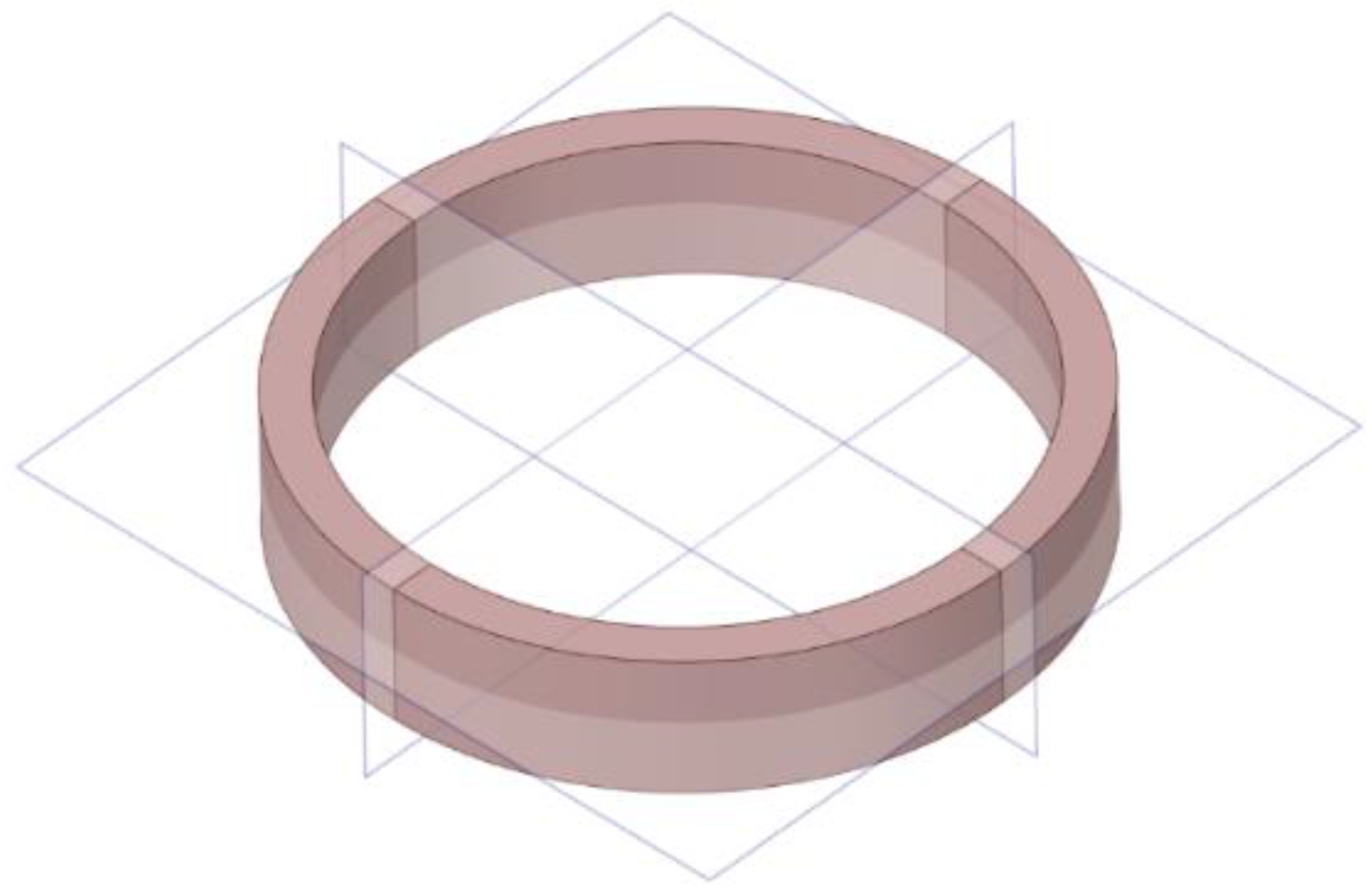
3. Finite Element Modeling
4. Evaluation of Dynamic Test Results
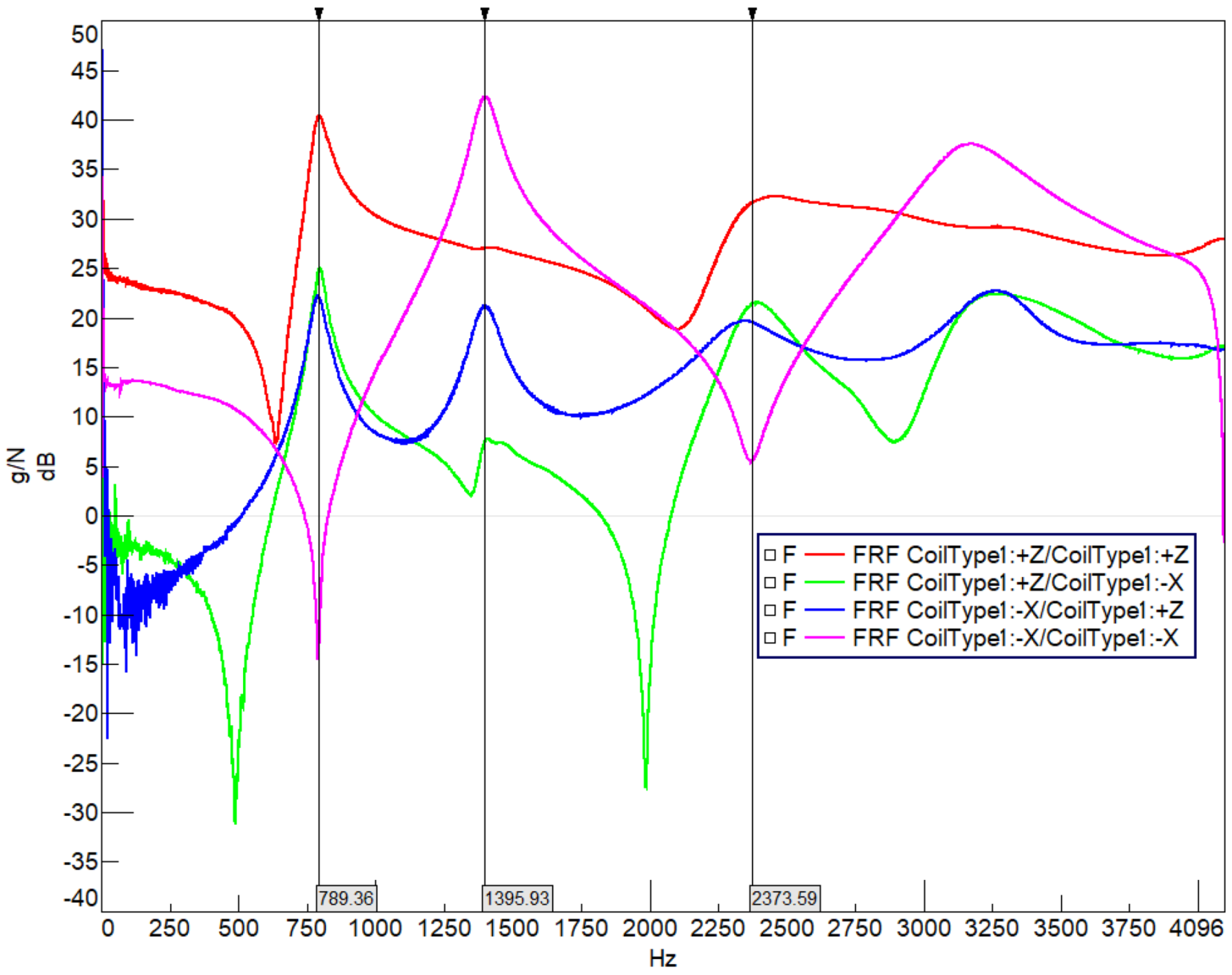
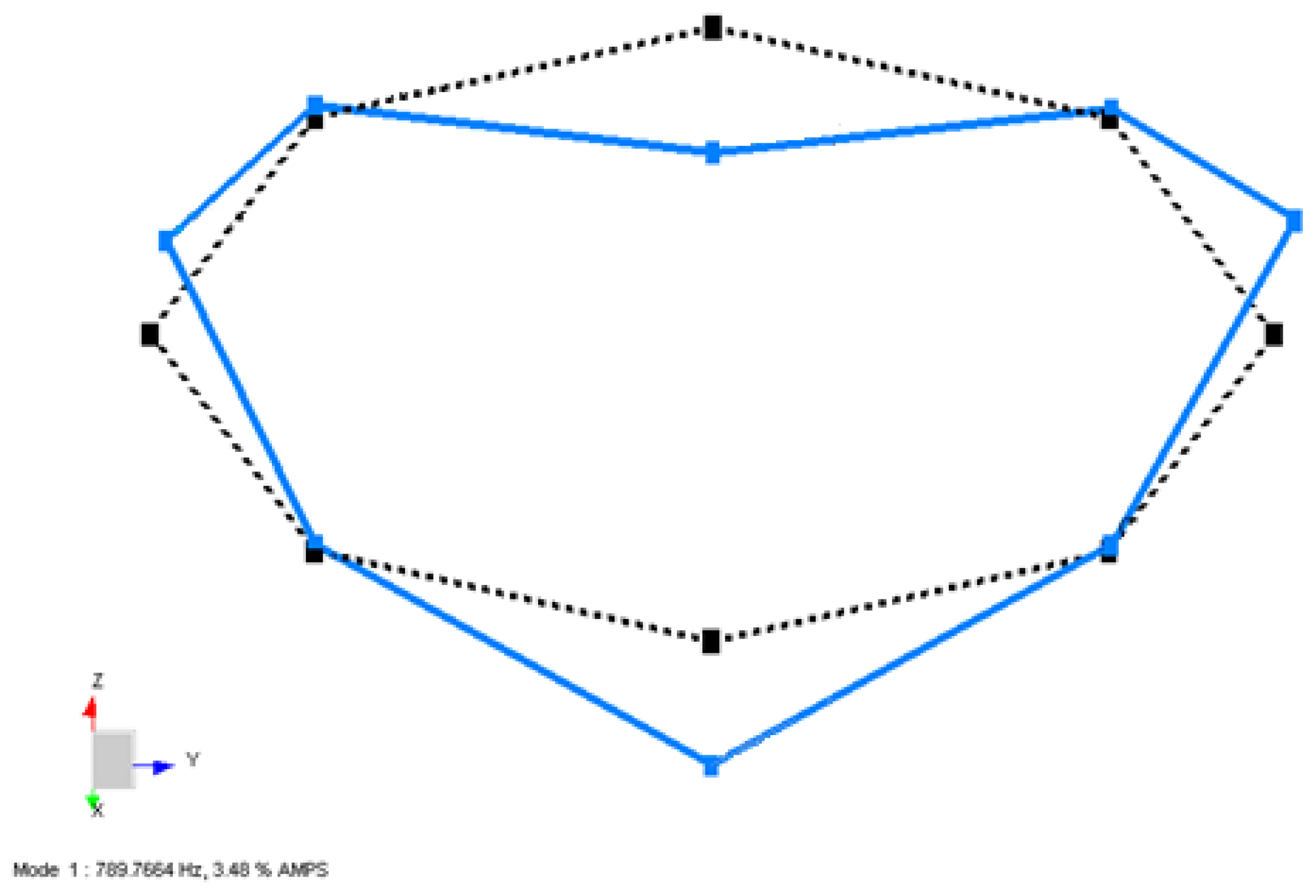
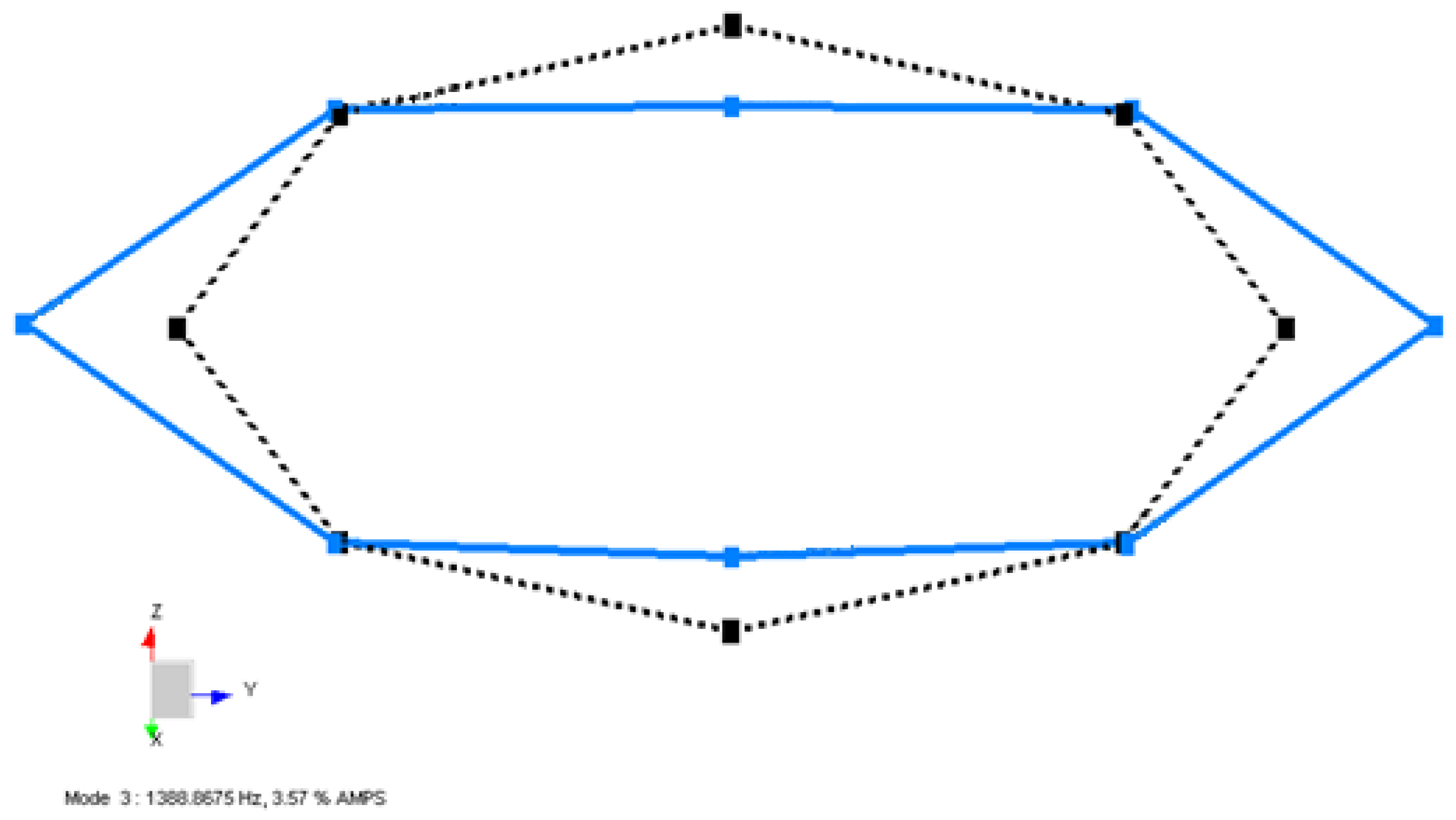
4.1. Modal Test Results of Coil Type-1
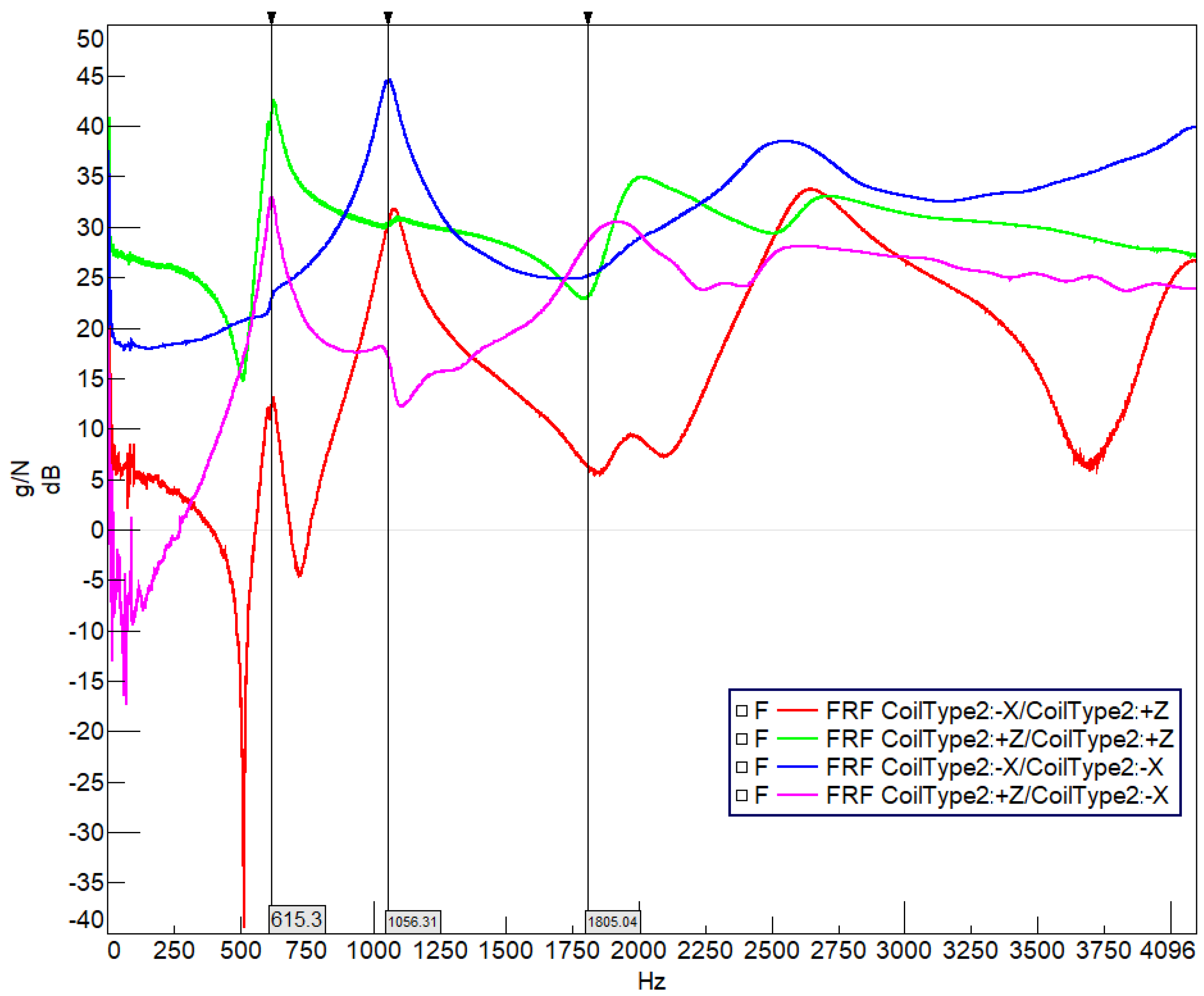
4.2. Modal Test Results of Coil Type-2
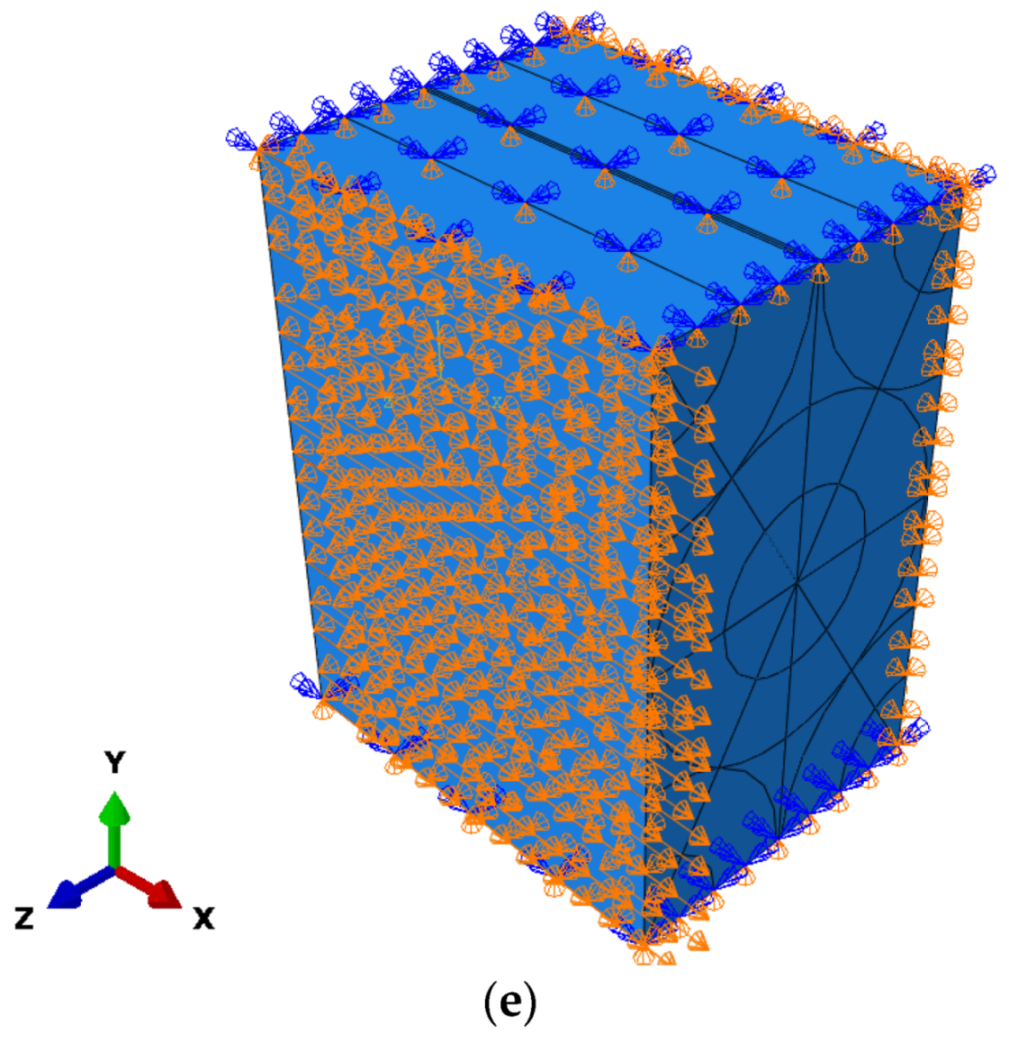
5. Finite Element Analysis Results
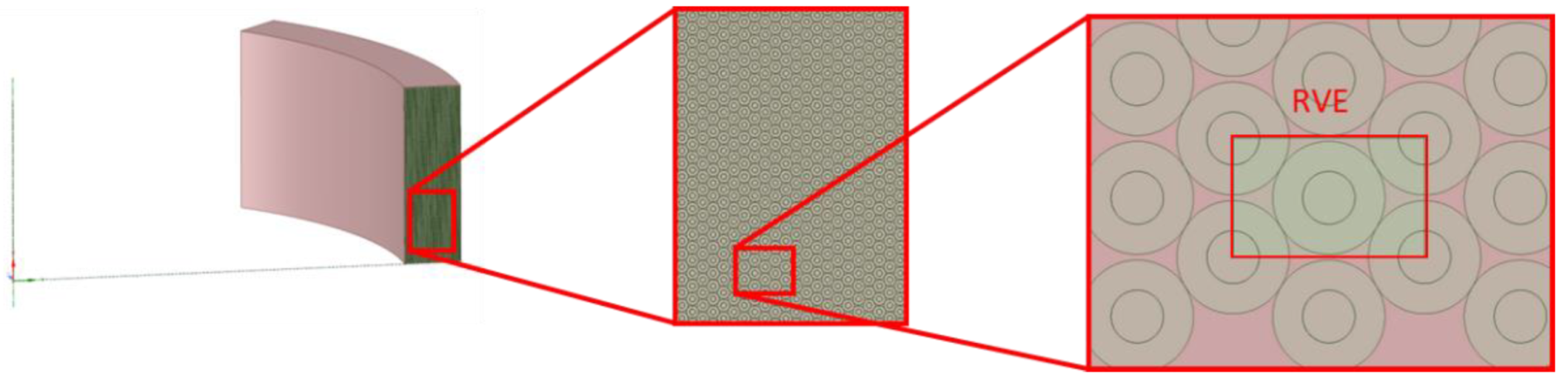
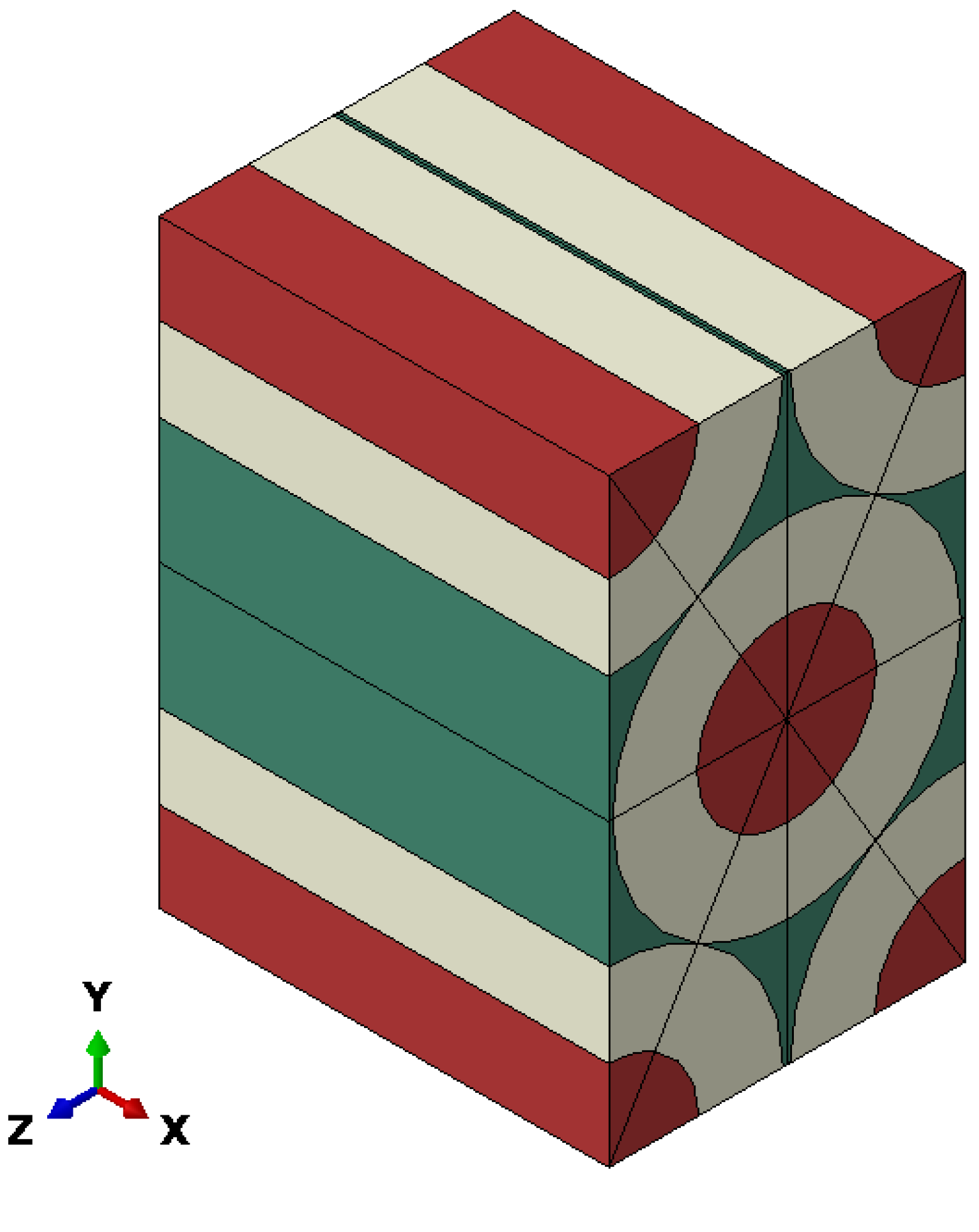
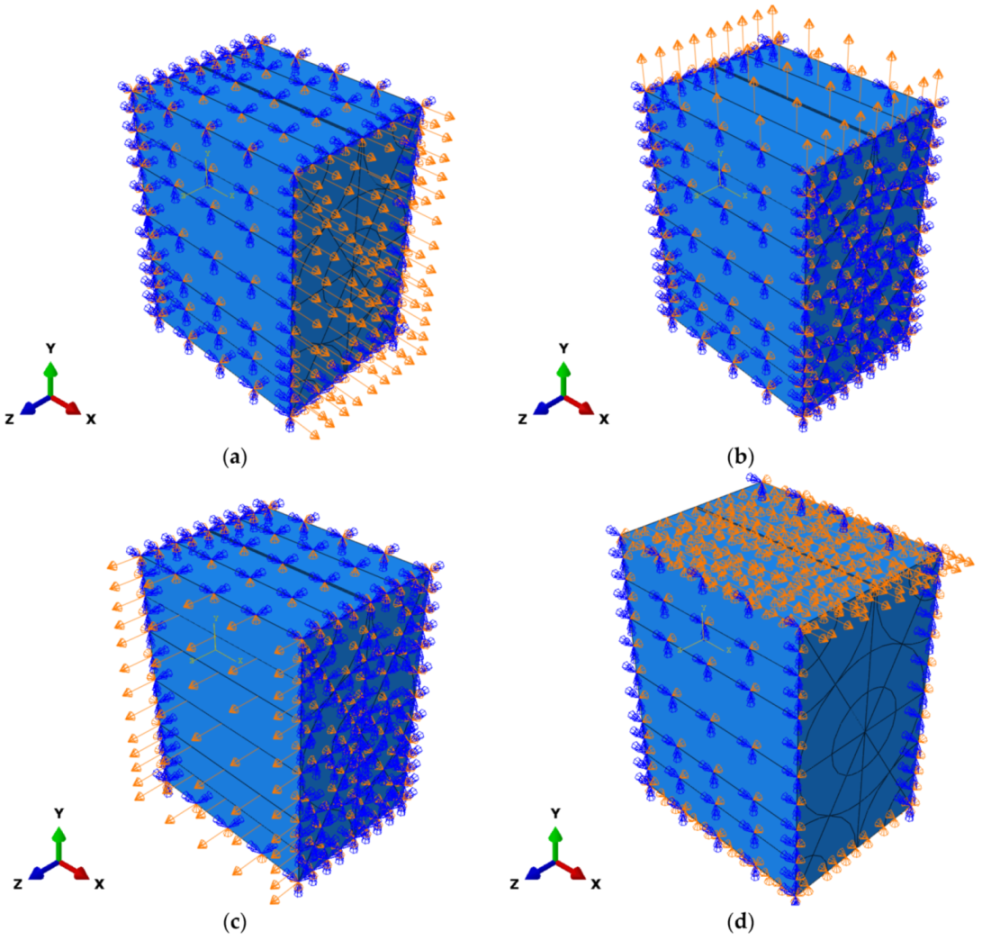
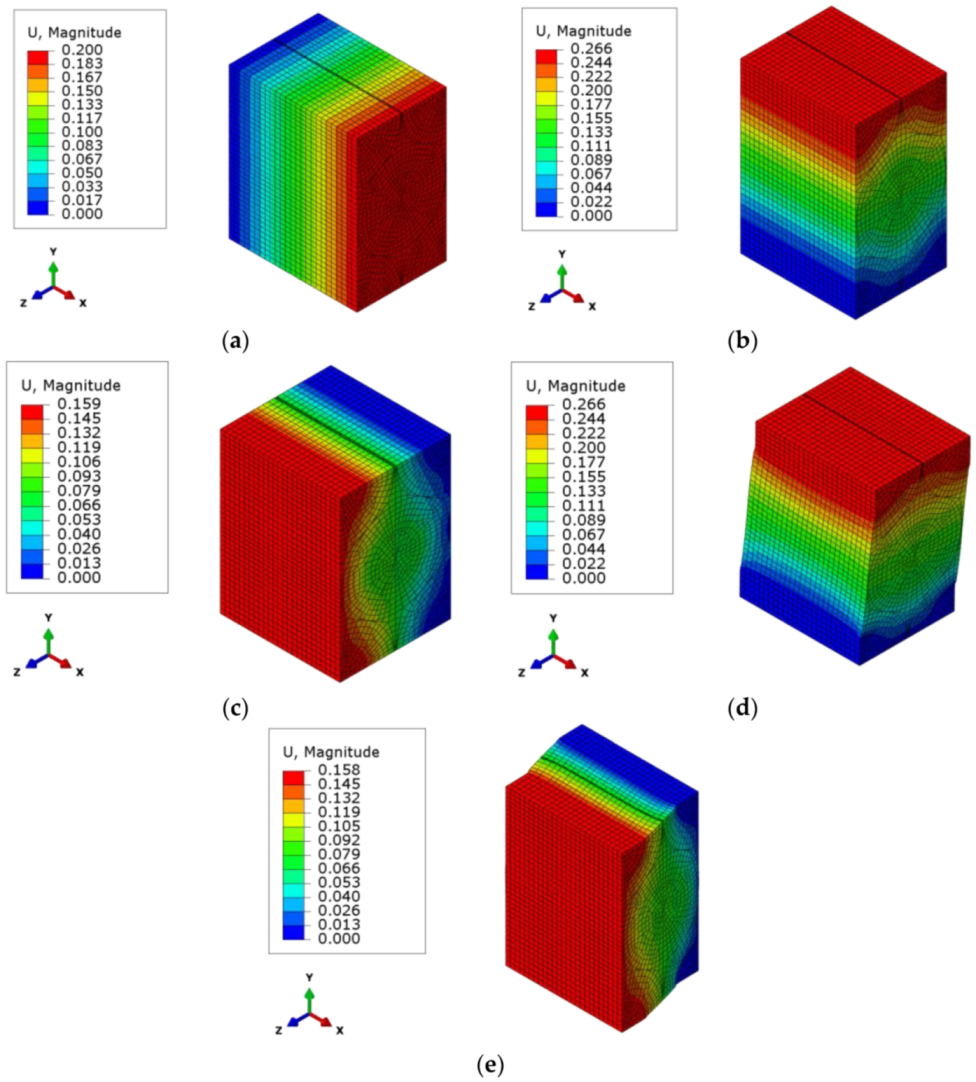
5.1. RVE Analysis Results
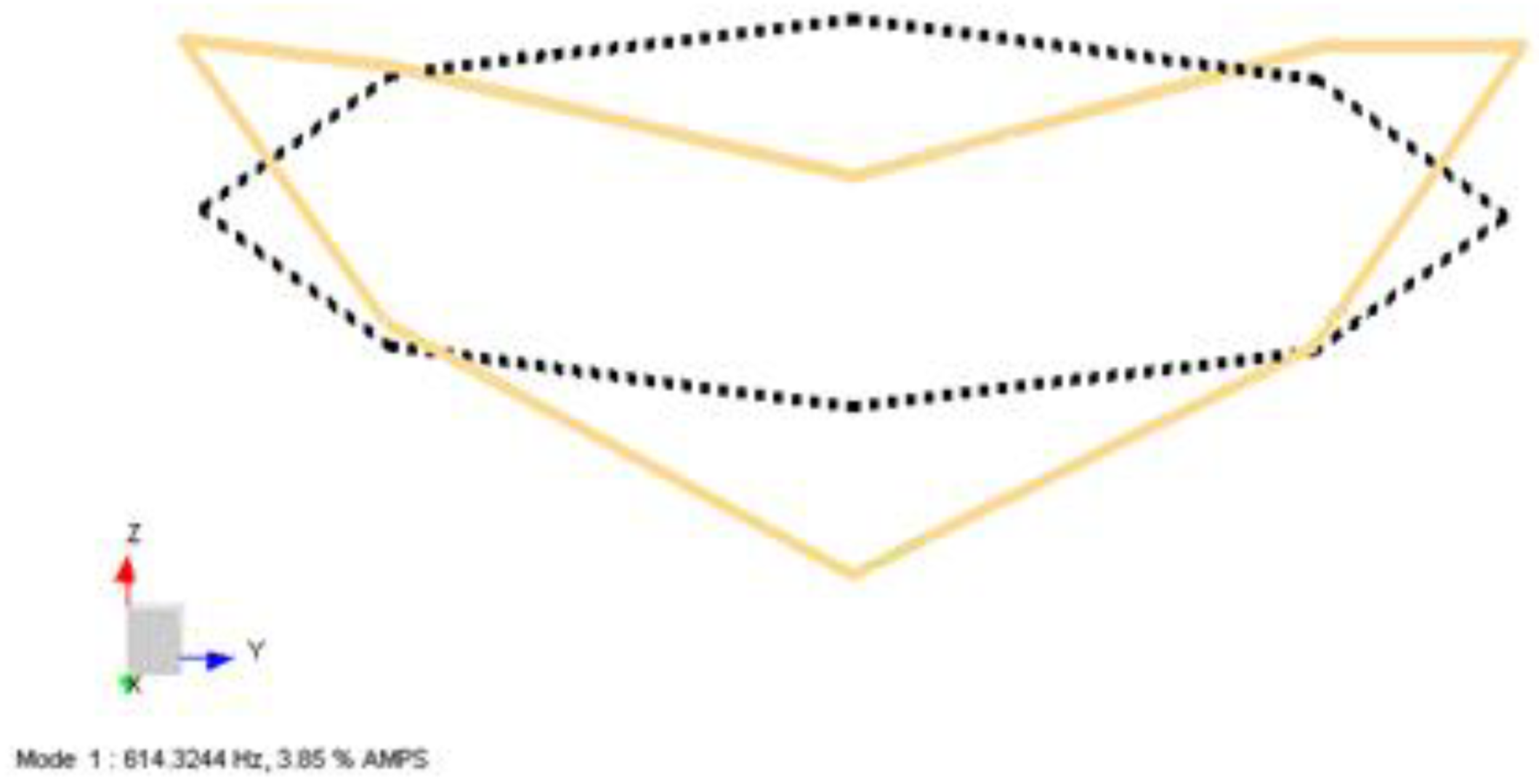
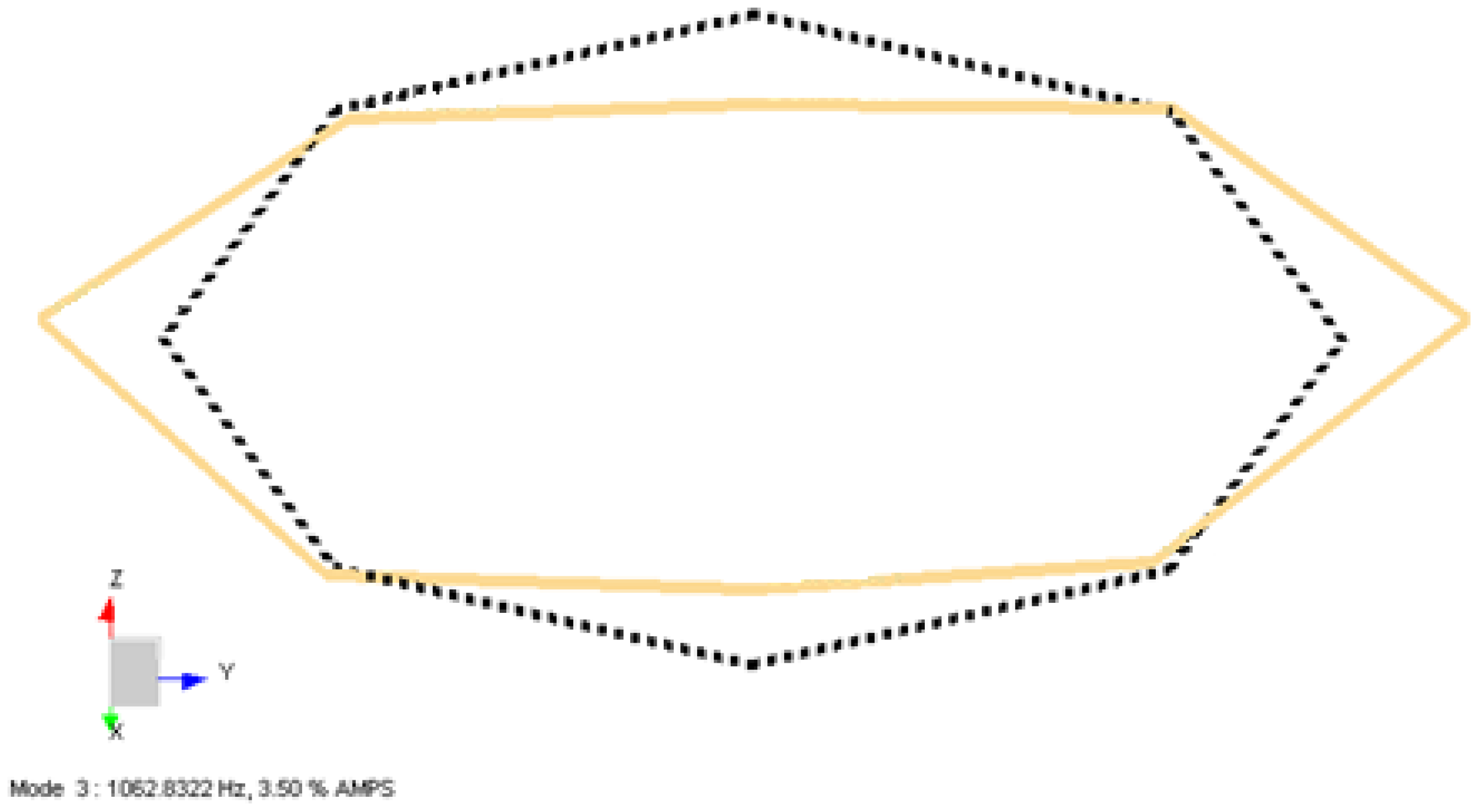
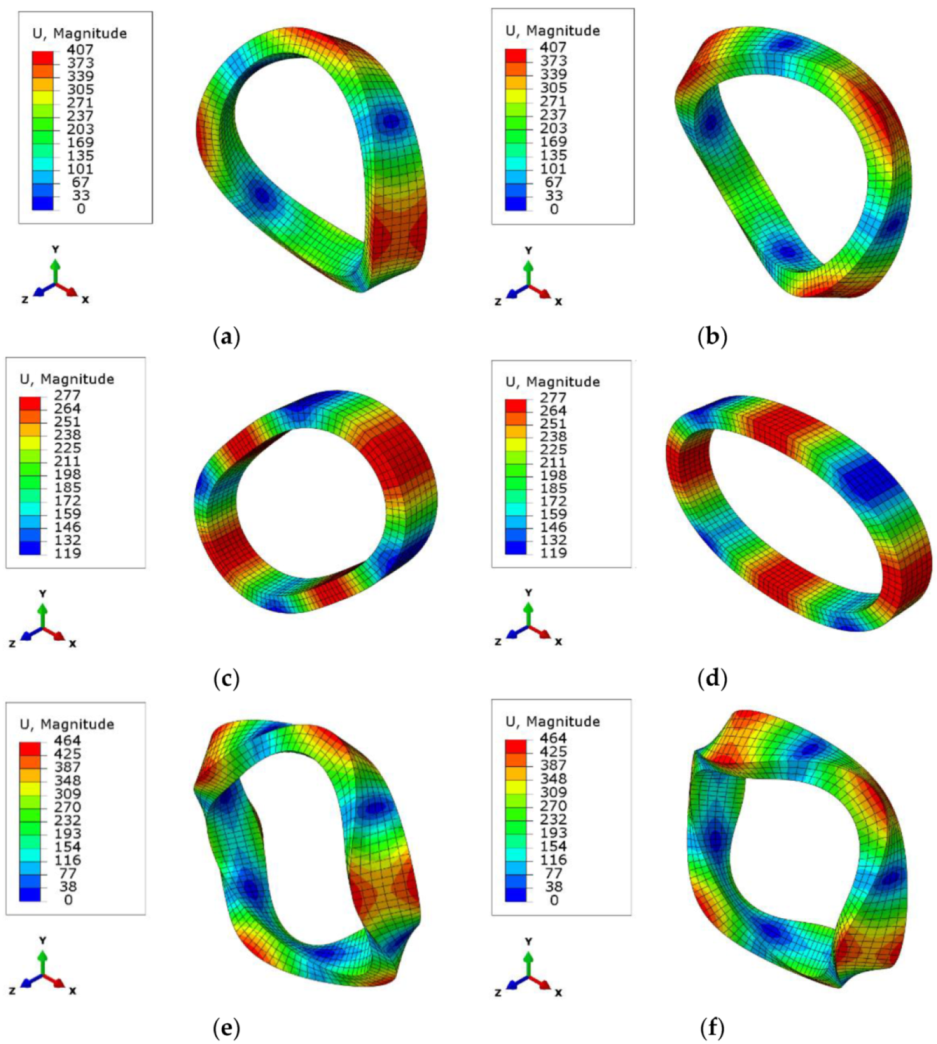
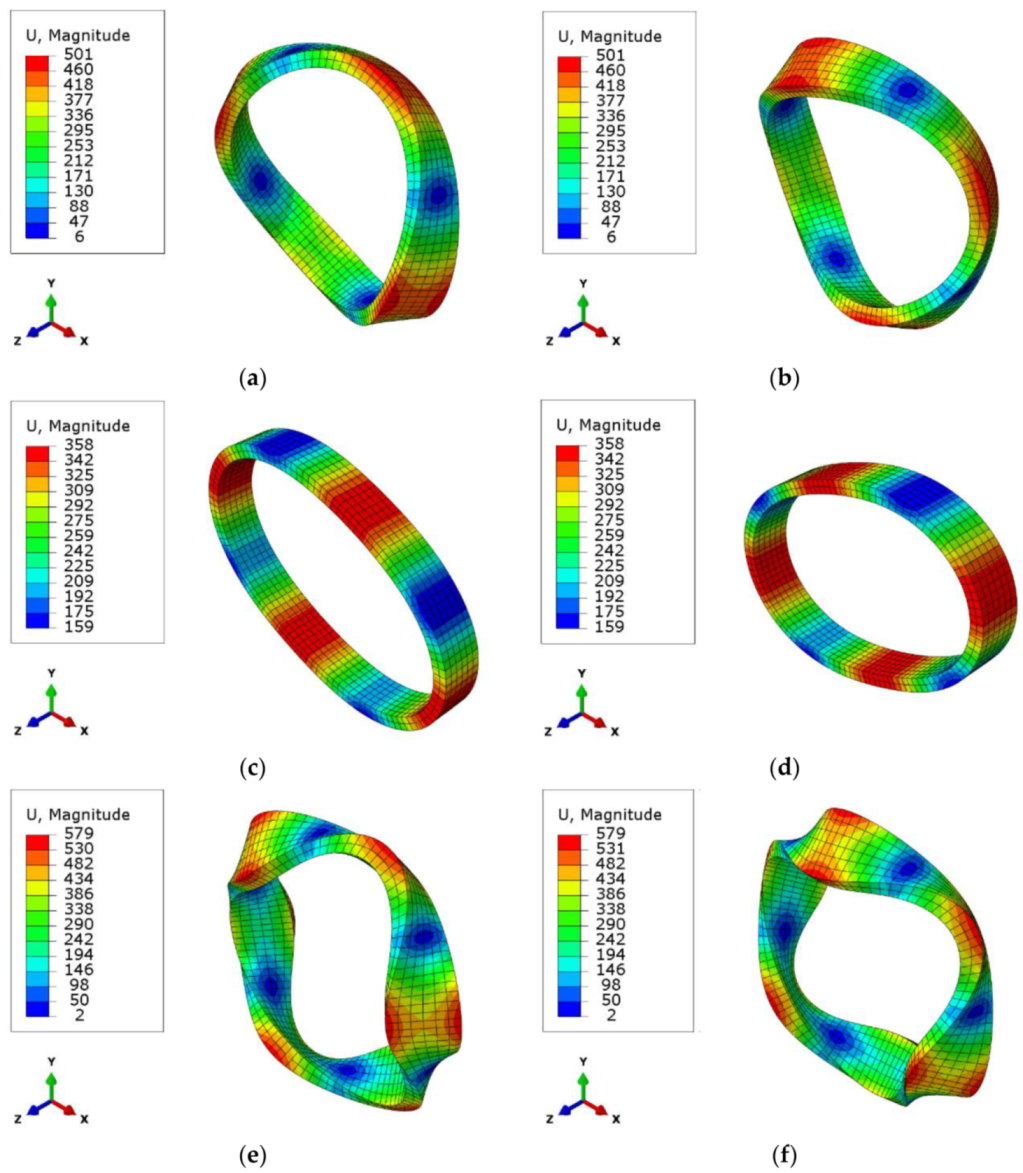
5.2. Modal Analysis Results of Global Coil FE Model
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Lefèvre, H. The Fiber-Optic Gyroscope, 2nd ed.; Artech House: Norwood, MA, USA, 2014. [Google Scholar]
- Titterton, D.; Weston, J. Strapdown Inertial Navigation Technology; Institution of Engineering and Technology: Stevenage, UK, 2004. [Google Scholar]
- Heimann, M.; Liesegang, M.; Arndt-Staufenbiel, N.; Schröder, H.; Lang, K.-D. Optical system components for navigation grade fiber optic gyroscopes. In Proceedings of the SPIE Vol. 8899, Emerging Technologies in Security and Defence; and Quantum Security II; and Unmanned Sensor Systems X, Dresden, Germany, 22 October 2013. [Google Scholar]
- Barbour, N.; Schmidt, G. Inertial sensor technology trends. IEEE Sens. J. 2001, 1, 332–339. [Google Scholar] [CrossRef]
- Juang, J.N.; Radharamanan, R. Evaluation of Ring Laser and Fiber Optic Gyroscope Technology; Mercer University: Macon, GA, USA, 2009. [Google Scholar]
- Ruffin, P.B. A review of fiber optics technology for military applications. In Proceedings of the SPIE Vol. 10299, Novel Materials and Crystal Growth Techniques for Nonlinear Optical Devices: A Critical Review, San Jose, CA, USA, 23 June 2000. [Google Scholar]
- Kumagai, T.; Soekawa, H.; Yuhara, T.; Kajioka, H.; Oho, S.; Sonobe, H. Fiber optic gyroscopes for vehicle navigation systems. In Proceedings of the SPIE Vol. 2070, Fiber Optic and Laser Sensors XI, Boston, MA, USA, 9 March 1994. [Google Scholar]
- Lad, P.B. Design and Evaluation of an Automated Fiber Optic Untwisting Machine. Ph.D. Thesis, Massachusetts Institute of Technology, Cambridge, MA, USA, 1999. [Google Scholar]
- Seçmen, B. Simulation on Interferometric Fiber Optic Gyroscope with Amplified Optical Feedback. Ph.D. Thesis, Middle East Technical University, Ankara, Turkey, 2003. [Google Scholar]
- Alaçakır, E. Modeling of Environmental Temperature Dependency for Sensors Operated by Sagnac Effect. Ph.D. Thesis, Middle East Technical University, Ankara, Turkey, 2019. [Google Scholar]
- Shupe, D. Thermally induced nonreciprocity in the fiber-optic interferometer. Appl. Opt. 1980, 19, 654–655. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Frigo, N.J. Compensation of linear sources of non-reciprocity in sagnac interferometers. In Proceedings of the SPIE Vol. 0412, Fiber Optic and Laser Sensors I, Arlington, TX, USA, 19 September 1983. [Google Scholar]
- Li, M.; Liu, T.; Zhou, Y.; Jiang, J.; Hou, L.; Wang, J.; Yao, X.S. A 3d model for analyzing thermal transient effects in fiber gyro coils. In Proceedings of the SPIE Vol. 6830, Advanced Sensor Systems and Applications III, Beijing, China, 17 January 2008. [Google Scholar]
- Ling, W.; Li, X.; Yang, H.; Liu, P.; Xu, Z.; Wei, Y. Reduction of the shupe effect in interferometric fiber optic gyroscopes: The double cylinder-wound coil. Opt. Commun. 2016, 370, 62–67. [Google Scholar] [CrossRef]
- Li, X.; Ling, W.; He, K.; Xu, Z.; Du, S. A thermal performance analysis and comparison of fiber coils with the d-cylwinding and qad winding methods. Sensors 2016, 16, 900. [Google Scholar] [CrossRef] [Green Version]
- Varnham, M.P.; Payne, D.N.; Barlow, A.J.; Birch, R.D. Analytic solution for the birefringence produced by thermal stress in polarization maintaining optical fibers. J. Lightwave Technol. 1983, 1, 332–339. [Google Scholar] [CrossRef] [Green Version]
- Choi, W.S. Analysis of temperature dependence of thermally induced transient effect in interferometric fiber-optic gyroscopes. J. Opt. Soc. Korea 2011, 15, 237–243. [Google Scholar] [CrossRef]
- Li, Z.; Meng, Z.; Liu, T.; Yao, X.S. A novel method for determining and improving the quality of a quadrupolar fiber gyro coil under temperature variations. Opt. Express 2013, 21, 2521–2530. [Google Scholar] [CrossRef] [PubMed]
- Zhang, Z.; Yu, F. Quantitative analysis for the effect of the thermal physical property parameter of adhesive on the thermal performance of the quadrupolar fiber coil. Opt. Express 2017, 25, 30513. [Google Scholar] [CrossRef] [PubMed]
- Zheng, Z.; Wang, Y.; Yu, J.; Liu, B.; Li, M.; Chen, G. Full—Parameters mathematical model of high precision fiber optic gyroscope coil and automatic forming technology. In Proceedings of the 2020 IEEE International Symposium on Inertial Sensors and Systems (INERTIAL), Hiroshima, Japan, 23–26 March 2020. [Google Scholar]
- Tirat, O.F.; Euverte, J.M. Finite element model of thermal transient effect in fiber optic gyro. In Proceedings of the SPIE Vol. 2837, Fiber Optic Gyros: 20th Anniversary Conference, Denver, CO, USA, 12 November 1996. [Google Scholar]
- Minakuchi, S.; Sanada, T.; Takeda, N.; Mitani, S.; Mizutani, T.; Sasaki, Y.; Shinozaki, K. Thermal strain in lightweight composite fiber-optic gyroscope for space application. J. Lightwave Technol. 2015, 33, 2658–2662. [Google Scholar] [CrossRef]
- Ogut, S.; Osunluk, B.; Ozbay, E. Modeling of thermal sensitivity of a fiber optic gyroscope coil with practical quadrupole winding. In Proceedings of the SPIE Vol. 10208, Fiber Optic Sensors and Applications XIV, Anaheim, CA, USA, 27 April 2017. [Google Scholar]
- Osunluk, B.; Ogut, S.; Ozbay, E. Thermally induced bias error due to strain inhomogeneity through the fiber optic gyroscope coil. Appl. Opt. 2017, 59, 10416–10421. [Google Scholar] [CrossRef] [PubMed]
- Osunluk, B.; Ogut, S.; Ozbay, E. Reduction of thermal strain induced rate error for navigation grade fiber optic gyroscope. In Proceedings of the DGON Inertial Sensors and Systems 2018, Braunschweig, Germany, 24–28 September 2018. [Google Scholar]
- Jia, M.; Yang, G. Research of optical fiber coil winding model based on large-deformation theory of elasticity and its application. Chin. J. Aeronaut. 2011, 24, 640–647. [Google Scholar] [CrossRef] [Green Version]
- Shan, L.; Li, J.; Liu, J.; Su, H.; Liang, Y. Low strain variation design method of the quadrupolar fiber coil based on the comprehensive stress analysis. Optoelectron. Adv. Mater. Rapid Commun. 2017, 11, 342–348. [Google Scholar]
- Gao, Z.; Zhang, Y.; Zhang, Y. Modeling for ifog vibration error based on the strain distribution of quadrupolar fiber coil. Sensors 2016, 16, 1131. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Yang, D.S. Design of fiber optic gyro inertial measurement system with high vibration resistance. In Proceedings of the 2nd International Conference on Electrical and Electronic Engineering, Hangzhou, China, 26–27 May 2019. [Google Scholar]
- Song, R.; Chen, X. Analysis of fiber optic gyroscope vibration error based on improved local mean decomposition and kernel principal component analysis. Appl. Opt. 2017, 56, 2265. [Google Scholar] [CrossRef] [PubMed]
- Song, N.; Zhang, C.; Du, X. Analysis of vibration error in fiber optic gyroscope. In Proceedings of the SPIE Vol. 4920, Advanced Sensor Systems and Applications, Shanghai, China, 9 September 2002. [Google Scholar]
- Wu, L.; Cheng, J.; Sun, F. Research on anti–vibration scheme of FOG SINS. In Proceedings of the 2009 the International Conference on Computer Engineering and Technology, Washington, DC, USA, 22–24 January 2009; Volume 2. [Google Scholar]
- Ma, Y.; Quan, B.; Han, Z.; Wang, J. Structural optimization of the path length control mirror for ring laser gyro. In Proceedings of the SPIE Vol. 10256, Second International Conference on Photonics and Optical Engineering, Xi’an, China, 28 February 2017. [Google Scholar]
- Fenercioğlu, T.O.; Yalçinkaya, T. Design optimization of a laser path length controller through numerical analysis and experimental validation. Int. J. Appl. Electromagn. Mech. 2019, 61, 429–443. [Google Scholar] [CrossRef]
- Fenercioğlu, T.O.; Yalçinkaya, T. Computational-experimental design framework for laser path length controller. Sensors 2021, 21, 5209. [Google Scholar] [CrossRef]
- Yalçinkaya, T.; Çakmak, S.O.; Tekoğlu, C. A crystal plasticity based finite element framework for RVE calculations of two-phase materials: Void nucleation in dual-phase steels. Finite Elem. Anal. Des. 2021, 187, 103510. [Google Scholar] [CrossRef]
- Yalçinkaya, T.; Gungor, G.O.; Cakmak, S.O.; Tekoğlu, C. A micromechanics based numerical investigation of dual phase steels. Procedia Struct. Integr. 2019, 21, 61–72. [Google Scholar] [CrossRef]
- Chen, J.; Ding, N.; Li, Z.; Wang, W. Enhanced environmental performance of fiber optic gyroscope by an adhesive potting technology. Appl. Opt. 2015, 54, 7828. [Google Scholar] [CrossRef]
- Gillooly, A.; Hill, M.; Read, T.; Maton, P. Next generation optical fibers for small diameter fiber optic Gyroscope (FOG) coils. In Proceedings of the 2017 DGON Inertial Sensors and Systems, Karlsruhe, Germany, 19–20 September 2017. [Google Scholar]
- Andreassen, E.; Andreasen, C.S. How to determine composite material properties using numerical homogenization. Comput. Mater. Sci. 2014, 83, 488–495. [Google Scholar] [CrossRef] [Green Version]
- Barbero, E. Finite Element Analysis of Composite Materials Using Abaqus™; CRC Press: Boca Raton, FL, USA, 2013. [Google Scholar]
- Barbero, E. Introduction to Composite Materials Design, 3rd ed.; CRC Press: Boca Raton, FL, USA, 2018. [Google Scholar]
- El Moumen, A.; Tarfaoui, M.; Lafdi, K. Computational homogenization of mechanical properties for laminate composites reinforced with thin film made of carbon nanotubes. Appl. Compos. Mater. 2018, 25, 569–588. [Google Scholar] [CrossRef]
- Jiang, W.G.; Zhong, R.Z.; Qin, Q.H.; Tong, Y.G. Homogenized finite element analysis on effective elastoplastic mechanical behaviors of composite with imperfect interfaces. Int. J. Mol. Sci. 2014, 15, 23389–23407. [Google Scholar] [CrossRef] [Green Version]
- Medeiros, R.; Moreno, M.; Marques, F.; Tita, V. Effective properties evaluation for smart composite materials. J. Braz. Soc. Mech. Sci. Eng. 2012, 34, 362–370. [Google Scholar] [CrossRef] [Green Version]
- Otero, F.; Oller, S.; Martinez, X.; Salomon, O. Numerical homogenization for composite materials analysis. Comparison with other micro mechanical formulations. Compos. Struct. 2015, 122, 405–416. [Google Scholar] [CrossRef] [Green Version]
- Yu, W.; Tang, T. Variational asymptotic method for unit cell homogenization of periodically heterogeneous materials. Int. J. Solids Struct. 2007, 44, 3738–3755. [Google Scholar] [CrossRef] [Green Version]
- Gürses, K.; Kuran, B.; Gençoğlu, C. Identification of material properties of composite plates utilizing model updating and response surface techniques. In Proceedings of the International Modal Analysis Conference XXIX, Jacksonville, FL, USA, 12 February 2011. [Google Scholar]
- Maia, N.; Silva, J. Theoretical and Experimental Modal Analysis; Research Studies Press: Boston, MA, USA, 1997. [Google Scholar]
- Ewins, D.J. Modal Testing: Theory, Practice, and Application, 2nd ed.; Research Studies Press: Boston, MA, USA, 2000. [Google Scholar]
- ABAQUS. Abaqus Documentation; Version 2020; Dassault Systémes: Providence, RI, USA, 2020. [Google Scholar]





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Fiber |
|---|---|
| Operating Wavelength (nm) | 1550 |
| Numerical Aperture | 0.19–0.21 |
| Mode Field Diameter (μm) | 6.0–7.0 @1550 nm |
| Beat Length @633 nm (mm) | ≤1.15 |
| Proof Test (%) | 1 (100 kpsi). 2 (200 kpsi) or greater upon request |
| Cladding Diameter (μm) | 80 ± 1 |
| Core Cladding Concentricity (μm) | ≤1.0 |
| Coating Diameter (μm) | 155 ± 5 |
| Coating Type | Dual Acrylate |
| Inner Radius (mm) | Outer Radius (mm) | Thickness (mm) |
|---|---|---|
| 32.3 | 38.35 | 11.9 |
| Inner Radius (mm) | Outer Radius (mm) | Thickness (mm) |
|---|---|---|
| 32.3 | 36.05 | 11.9 |
| E1 | E2 | E3 | ν12 | ν13 | ν23 | G12 | G13 | G23 |
|---|---|---|---|---|---|---|---|---|
| 19,382 | 5852 | 5823 | 0.104 | 0.104 | 0.546 | 180 | 180 | 175 |
| Test/Analysis | Mode 1 | Mode 2 | Mode 3 |
|---|---|---|---|
| Modal Test | 789.34 Hz | 1389.48 Hz | 2374.85 Hz |
| Modal Analysis | 785.09 Hz | 1532.70 Hz | 2386.50 Hz |
| Percent Error | 0.54% | 10.31% | 0.49% |
| Test/Analysis | Mode 1 | Mode 2 | Mode 3 |
|---|---|---|---|
| Modal Test | 618.17 Hz | 1055.54 Hz | 1814.25 Hz |
| Modal Analysis | 612.94 Hz | 1182.4 Hz | 1987.55 Hz |
| Percent Error | 0.85% | 12.01% | 9.55% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kahveci, Ö.; Gençoğlu, C.; Yalçinkaya, T. Experimental Analysis and Multiscale Modeling of the Dynamics of a Fiber-Optic Coil. Sensors 2022, 22, 582. https://doi.org/10.3390/s22020582
Kahveci Ö, Gençoğlu C, Yalçinkaya T. Experimental Analysis and Multiscale Modeling of the Dynamics of a Fiber-Optic Coil. Sensors. 2022; 22(2):582. https://doi.org/10.3390/s22020582
Chicago/Turabian StyleKahveci, Özkan, Caner Gençoğlu, and Tuncay Yalçinkaya. 2022. "Experimental Analysis and Multiscale Modeling of the Dynamics of a Fiber-Optic Coil" Sensors 22, no. 2: 582. https://doi.org/10.3390/s22020582
APA StyleKahveci, Ö., Gençoğlu, C., & Yalçinkaya, T. (2022). Experimental Analysis and Multiscale Modeling of the Dynamics of a Fiber-Optic Coil. Sensors, 22(2), 582. https://doi.org/10.3390/s22020582