
Marine Robotics for Deep-Sea Specimen Collection: A Systematic Review of Underwater Grippers

 ,
,  ,
,  ,
,  and
and 
Abstract
:
1. Introduction
1.1. Field-Specific Requirements for Design and Control of Manipulation Tools
1.2. Rationales and Objectives of the Proposed Review of Underwater Grippers
2. Materials and Methods
2.1. Studies Selection Process and Eligibility Criteria
2.2. Data Extraction
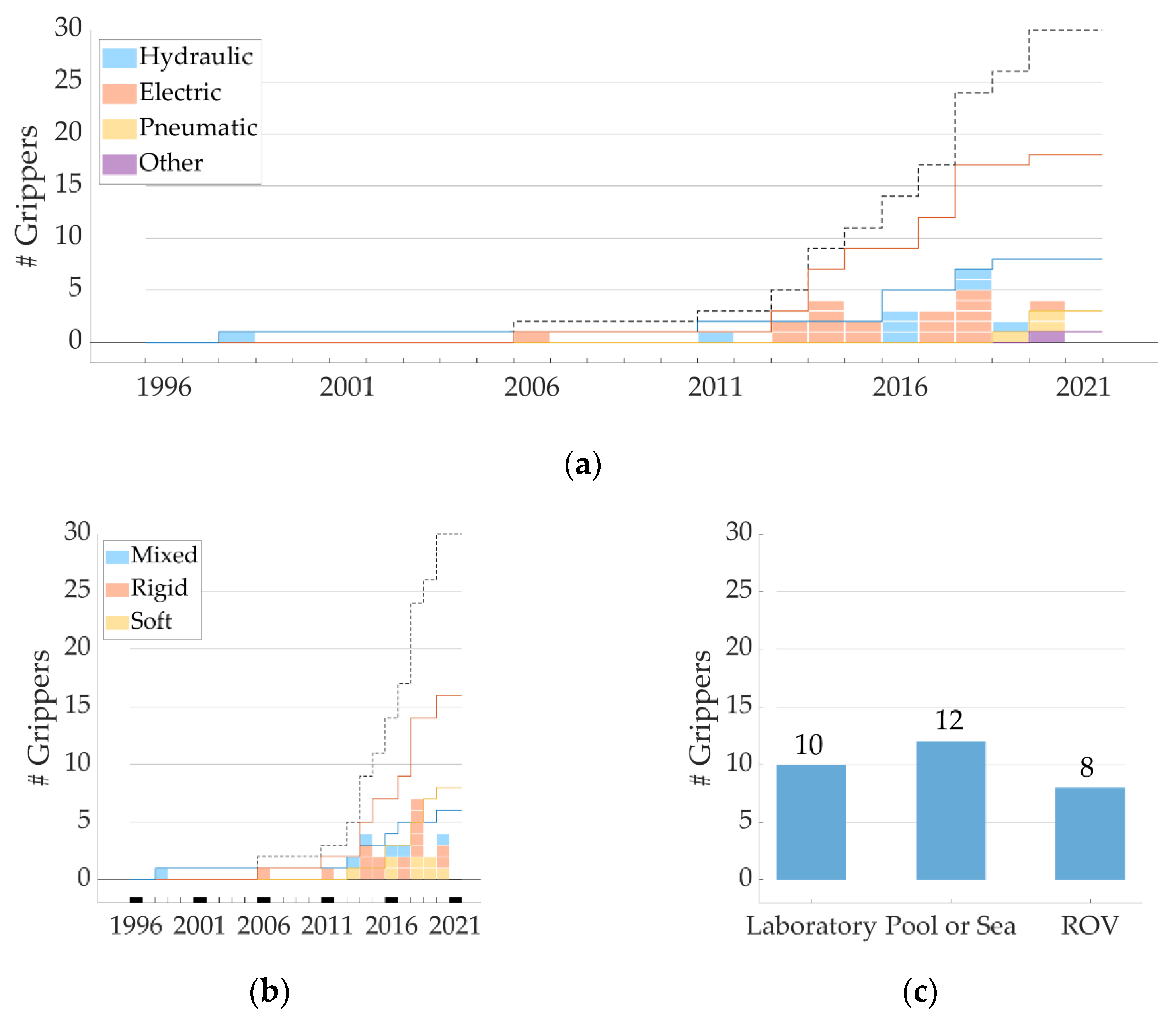
- Prototypes tested in a laboratory tank: a prototype of the proposed technology was built for validation and testing in laboratory environment (i.e., water tanks), to offer an initial level of confidence for further development.
- Prototypes tested in a pool or in shallow sea water: prototype, system or subsystem modules, in a more realistic or near-final version, were validated or demonstrated in a relevant environment, such as pools or shallow sea water. This includes initial integration at some level with other operational systems, or facing additional design challenges (e.g., control, communication, etc.).
- Prototypes tested on ROVs: a prototype of the technology was as close to the operational version as possible, and was tested in deep-sea, integrating it into an ROV.
3. Overview of Marine Technologies for Sampling
3.1. Underwater Grippers and Tools Commonly Used for Deep-Sea Sampling
- Grippers, namely the end-effectors of the manipulators, directly used for sample collection;
- Sampling tools, which are manipulated through the gripper and enhance its operating possibilities;
- Storage systems, whose characteristics and conformation influence the sequences of manipulative actions selected.
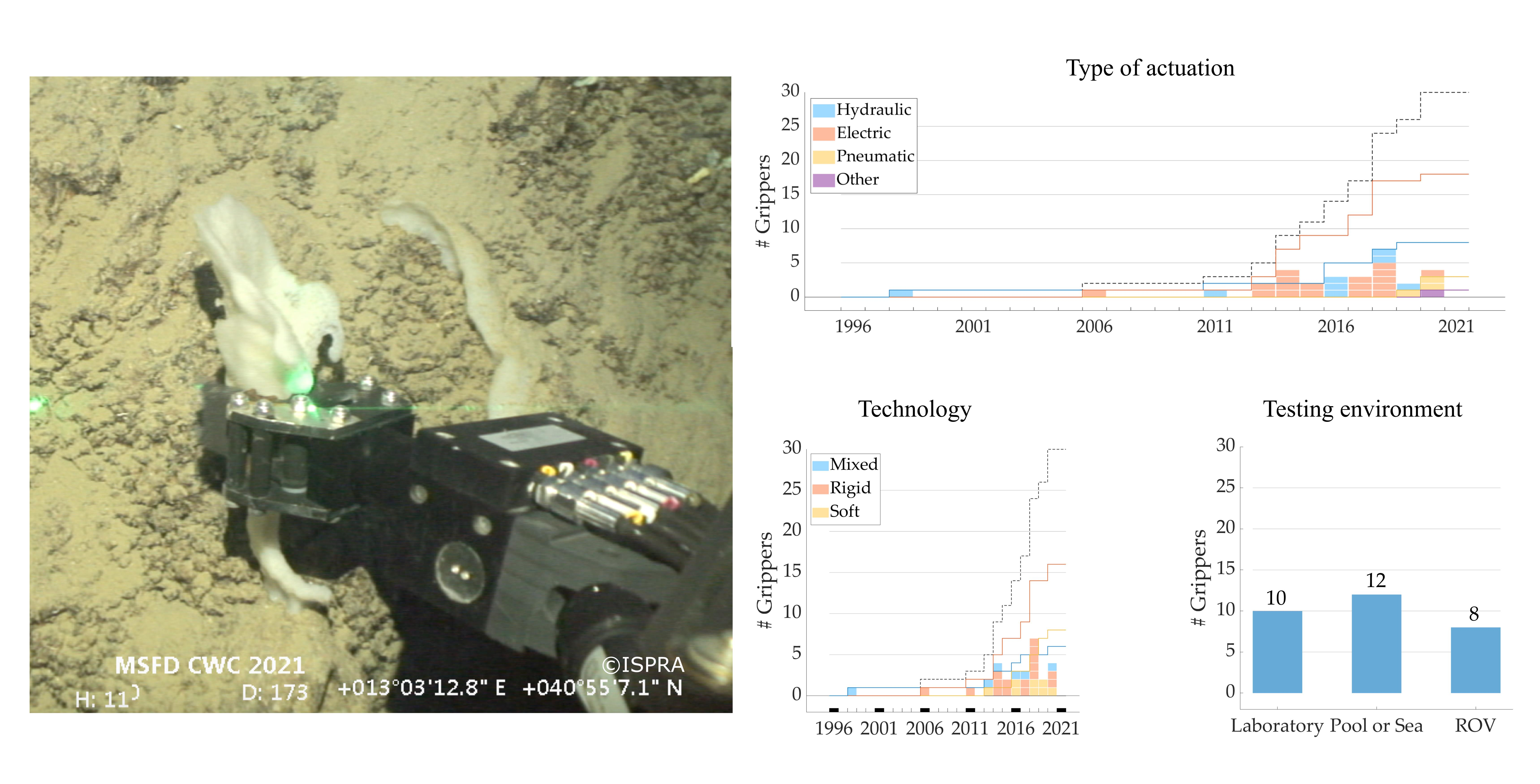
- Four classes of manipulator claws: parallel fingers, opposed or intermeshed fingers, grabber claw and cage claw; details on each class are provided in Section 3.1.1.
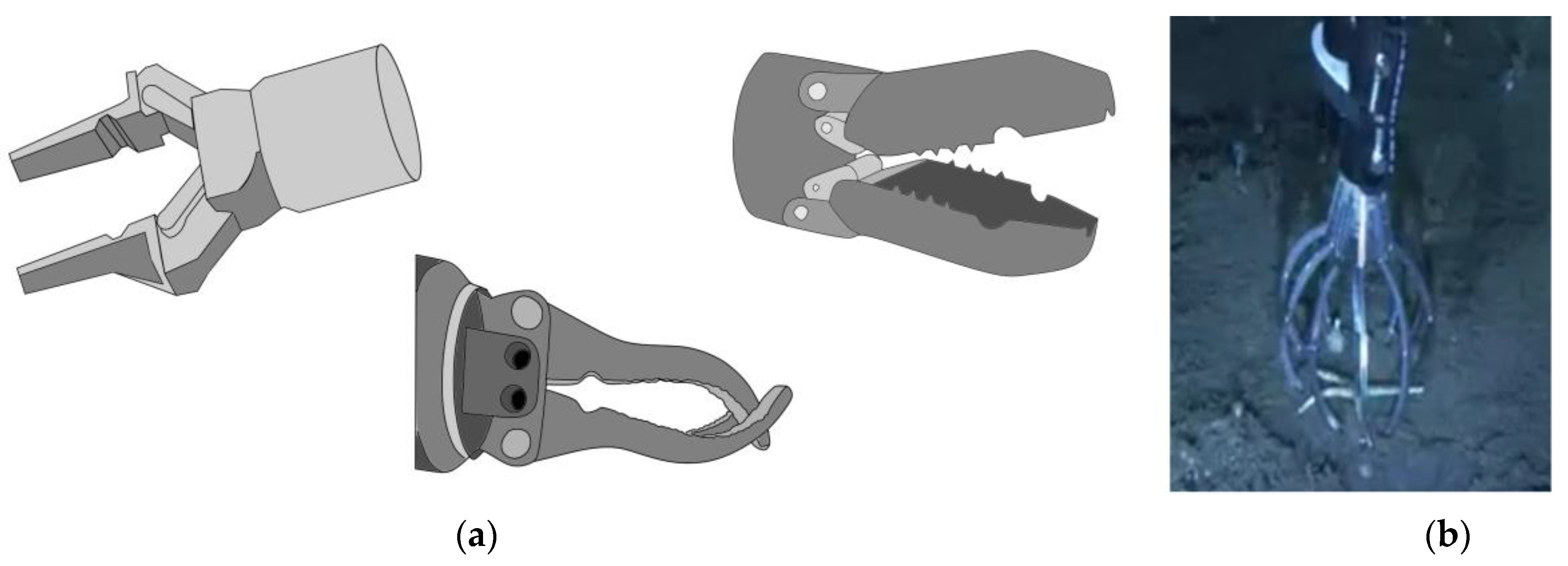
- Five classes of sampling gears: suction samplers, scoops and scoop-nets, corers, traps, and water bottles; details on each class are provided in Section 3.1.2.
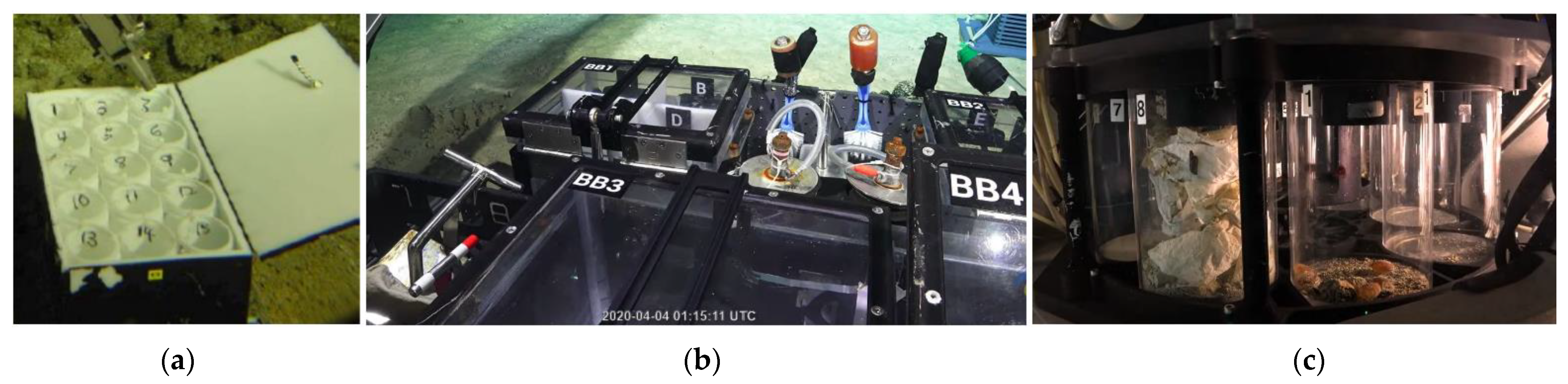
- Four basic classes of storage systems: bioboxes, carousel jars, ROV racks and baskets; details on each class are provided in Section 3.1.3.
- on the optional tools supported by the vehicle,
- on the resources invested in buying new equipment,
- on the equipment selection during the preparation of the specific cruise.
3.1.1. Grippers: Parallel, Intermeshed, Grabber and Cage Claw
3.1.2. Sampling Tools: Suction Samplers, Scoops, Corers, Traps and Niskin Bottles
3.1.3. Storage Systems: Bioboxes, Jars, ROV Rack and Baskets
3.2. Research Status of Underwater Gripper Technologies
3.2.1. Studies Selection Procedure
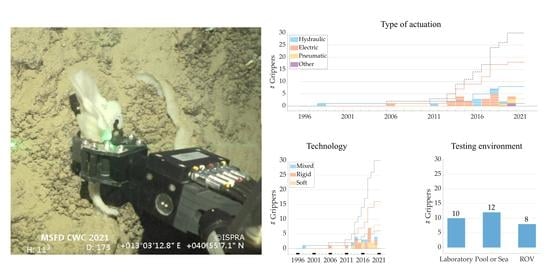
3.2.2. Overview on the Research Status of Underwater Gripper Technologies
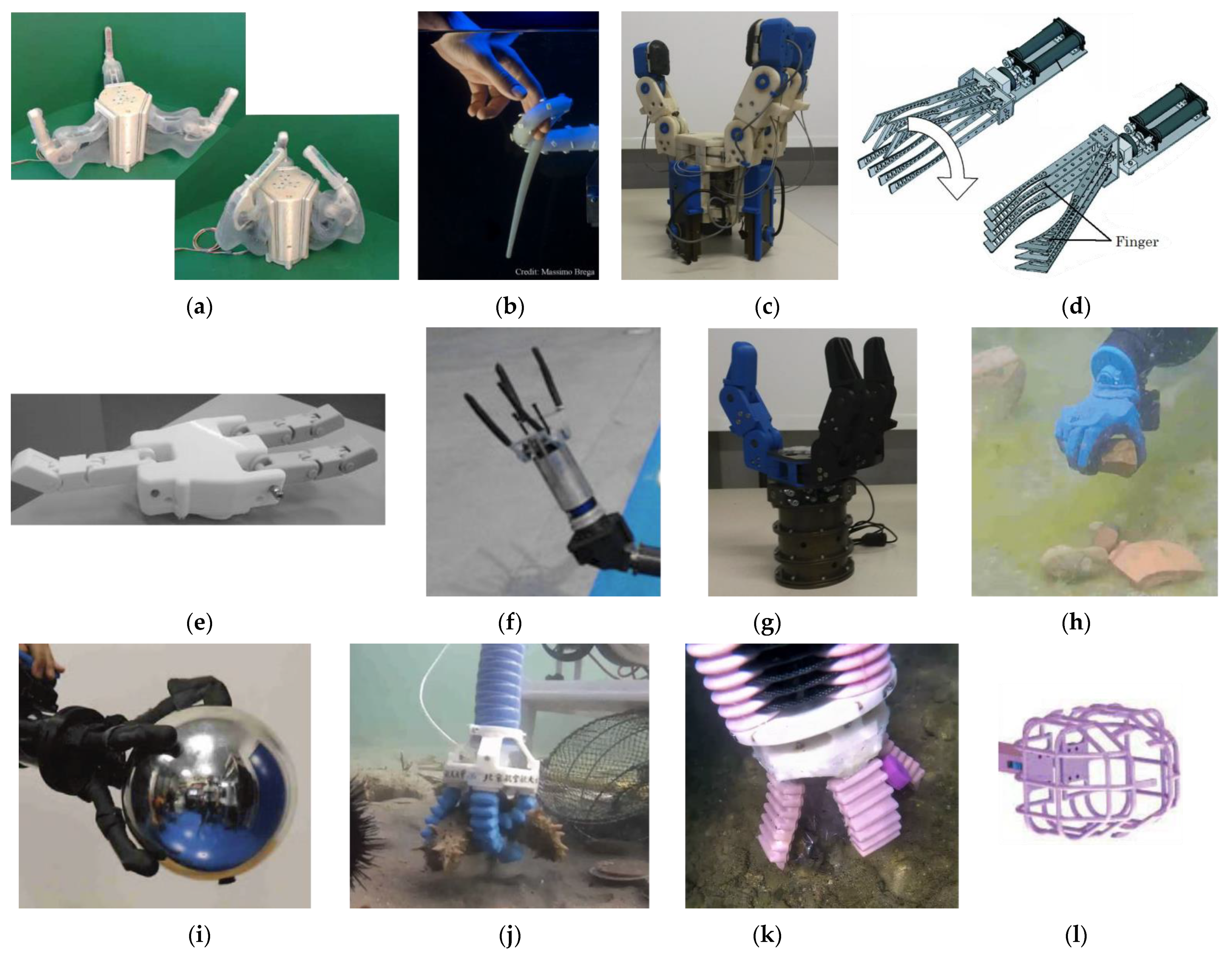
3.2.3. Prototypes Tested in Lab Tanks
3.2.4. Prototypes Tested in Pools or the Sea
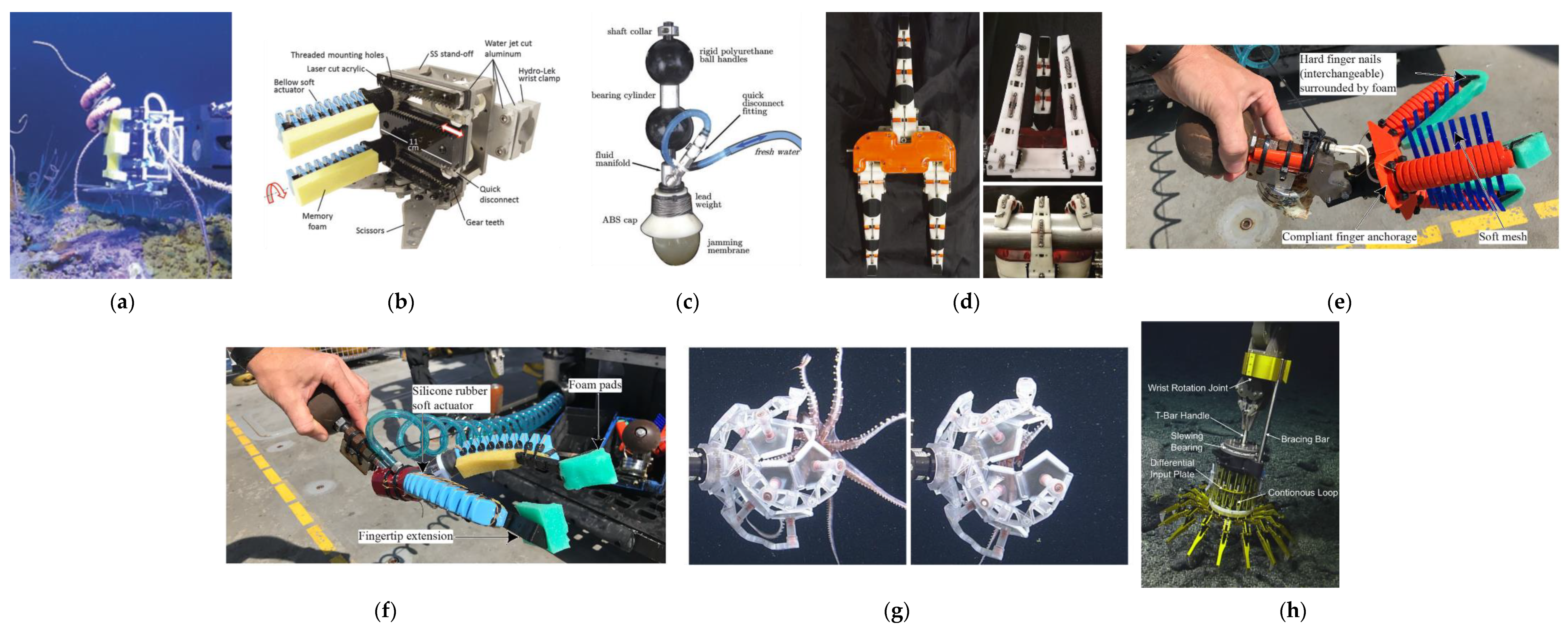
3.2.5. Prototypes Tested in the Deep-Sea on ROVs
4. Discussion
4.1. Trends in Gripper Technologies for Marine Sampling
- avoid a design with a high number of dynamic seals, since their wear rate increases for high-pressure applications;
- keep the weight as proximal as possible to reduce inertial effects.
4.2. Versatility of Gripper Tools in Covering Atomic Manipulations
4.3. Environmental and Operational Requirements and Possible Solutions
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Negrello, F.; Stuart, H.S.; Catalano, M.G. Hands in the Real World. Front. Robot. AI 2020, 6, 6. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Billard, A.; Kragic, D. Trends and Challenges in Robot Manipulation. Science 2019, 364, eaat8414. [Google Scholar] [CrossRef]
- Ajoudani, A.; Zanchettin, A.M.; Ivaldi, S.; Albu-Schäffer, A.; Kosuge, K.; Khatib, O. Progress and Prospects of the Human–Robot Collaboration. Auton. Robot. 2018, 42, 957–975. [Google Scholar] [CrossRef] [Green Version]
- Bütepage, J.; Kragic, D. Human-Robot Collaboration: From Psychology to Social Robotics. arXiv 2017, arXiv:1705.10146. [Google Scholar]
- Controzzi, M.; Cipriani, C.; Carrozza, M.C. Design of Artificial Hands: A Review. In Springer Tracts in Advanced Robotics; Springer: Berlin/Heidelberg, Germany, 2014; Volume 95, pp. 219–246. [Google Scholar]
- Weir, R.F.; Sensinger, J.W. The Design of Artificial Arms and Hands for Prosthetic Applications. In Biomedical Engineering and Design Handbook; The McGraw-Hill Companies, Inc.: New York, NY, USA, 2009. [Google Scholar]
- Aguzzi, J.; Costa, C.; Calisti, M.; Funari, V.; Stefanni, S.; Danovaro, R.; Gomes, H.I.; Vecchi, F.; Dartnell, L.R.; Weiss, P.; et al. Research Trends and Future Perspectives in Marine Biomimicking Robotics. Sensors 2021, 21, 3778. [Google Scholar] [CrossRef] [PubMed]
- Sivčev, S.; Coleman, J.; Omerdić, E.; Dooly, G.; Toal, D. Underwater Manipulators: A Review. Ocean. Eng. 2018, 163, 431–450. [Google Scholar] [CrossRef]
- Teigland, H.; Hassani, V.; Moller, M.T. Operator Focused Automation of ROV Operations. In Proceedings of the 2020 IEEE/OES Autonomous Underwater Vehicles Symposium, AUV 2020, St Johns, NL, Canada, 30 September 2020. [Google Scholar]
- Galloway, K.C.; Becker, K.P.; Phillips, B.; Kirby, J.; Licht, S.; Tchernov, D.; Wood, R.J.; Gruber, D.F. Soft Robotic Grippers for Biological Sampling on Deep Reefs. Soft Robot. 2016, 3, 23–33. [Google Scholar] [CrossRef]
- Ullman, D.G. McGraw-Hill series in mechanical engineering. In The Mechanical Design Process, 4th ed.; McGraw-Hill Book Company: New York, NY, USA, 2010; ISBN 9780072975741. [Google Scholar]
- Clark, M.R.; Consalvey, M.; Rowden, A.A. Biological Sampling in the Deep Sea; John Wiley & Sons: Hoboken, NJ, USA, 2016; ISBN 9781118332535. [Google Scholar]
- Wang, Z.; Cui, W. For Safe and Compliant Interaction: An Outlook of Soft Underwater Manipulators. Proc. Inst. Mech. Eng. Part M J. Eng. Marit. Environ. 2021, 235, 3–14. [Google Scholar] [CrossRef]
- Subad, R.A.S.I.; Cross, L.B.; Park, K. Soft Robotic Hands and Tactile Sensors for Underwater Robotics. Appl. Mech. 2021, 2, 356–383. [Google Scholar] [CrossRef]
- Mazzeo, A.; Aguzzi, J.; Calisti, M.; Canese, S.; Angiolillo, M.; Allcock, A.L.; Vecchi, F.; Stefanni, S.; Controzzi, M. Marine Robotics for Deep-Sea Specimen Collection: A Taxonomy of Underwater Manipulative Actions. Sensors. under review.
- Page, M.J.; McKenzie, J.E.; Bossuyt, P.M.; Boutron, I.; Hoffmann, T.C.; Mulrow, C.D.; Shamseer, L.; Tetzlaff, J.M.; Akl, E.A.; Brennan, S.E.; et al. The PRISMA 2020 Statement: An Updated Guideline for Reporting Systematic Reviews. Syst. Rev. 2021, 10, 89. [Google Scholar] [CrossRef] [PubMed]
- Mura, D.; Barbarossa, M.; Dinuzzi, G.; Grioli, G.; Caiti, A.; Catalano, M.G. A Soft Modular End Effector for Underwater Manipulation: A Gentle, Adaptable Grasp for the Ocean Depths. IEEE Robot. Autom. Mag. 2018, 25, 45–56. [Google Scholar] [CrossRef]
- Sinatra, N.R.; Teeple, C.B.; Vogt, D.M.; Parker, K.K.; Gruber, D.F.; Wood, R.J. Ultragentle Manipulation of Delicate Structures Using a Soft Robotic Gripper. Sci. Robot. 2019, 4, 5425. [Google Scholar] [CrossRef]
- Schmidt Ocean Institute Schmidt Ocean-YouTube. Available online: https://www.youtube.com/channel/UC1m5LdKP0m64n8nY3NhK6Zg (accessed on 22 June 2021).
- Institut Français de Recherche pour l’Exploitation de la Mer (IFREMER) Victor 6000: Le Véhicule. Available online: https://wwz.ifremer.fr/grands_fonds/Les-moyens/Les-engins/Les-robots/Robots-Ifremer/Le-Victor-6000/Sous-ensembles/Le-vehicule (accessed on 6 November 2021).
- Instituto Español de Oceanografía (IEO) Liropus 2000. Available online: http://www.ba.ieo.es/es/presentacion/equipamiento/equipamiento-cientifico/664-liropus-2000-el-nuevo-rov-del-ieo (accessed on 6 November 2021).
- Instituto Español de Oceanografía First Video Volcano El Hierro from ROV Liropus 2000: 1 November 2011, Timestamp: 00:00:51—YouTube. Available online: https://www.youtube.com/watch?v=FWNhoPvSyC4&t=51s (accessed on 24 August 2021).
- Schmidt Ocean Institute ROV Dive 416—Ashmore Reef Location Six, Dive 2-Part B, Timestamp: 01:25:39—YouTube. Available online: https://www.youtube.com/watch?v=ROp8UrUxATc&t=5139s (accessed on 26 August 2021).
- Schmidt Ocean Institute ROV SuBastian Dive 318—Bremer Canyon, Australia-FK200126, Timestamp: 00:23:09—YouTube. Available online: https://www.youtube.com/watch?v=yK5tN-AkBts&t=1389s (accessed on 26 August 2021).
- Schmidt Ocean Institute ROV Dive 416—Ashmore Reef Location Six, Dive 2-Part B, Timestamp: 01:03:03—YouTube. Available online: https://www.youtube.com/watch?v=ROp8UrUxATc&t=3783s (accessed on 26 August 2021).
- Schmidt Ocean Institute ROV SuBastian Dive 401 (Pt A)—Newly Discovered 500m Tall Reef, Australia-FK200930, Timestamp: 00:11:44—YouTube. Available online: https://www.youtube.com/watch?v=L_Ee7JV5oSI&t=704s (accessed on 26 August 2021).
- Schmidt Ocean Institute ROV SuBastian Dive 350—Cloates Canyon, Australia-FK200308, Timestamp: 00:40:13—YouTube. Available online: https://www.youtube.com/watch?v=zRDXpc_4gE8&t=2413s (accessed on 26 August 2021).
- General Oceanics Water Sampling: Water Sampling Bottles: ROV Niskin Bottles: Rov Niskin Water Sampler, 5L | Figure 2. Available online: https://www.generaloceanics.com/rov-niskin-water-sampler-5l.html (accessed on 26 August 2021).
- Schmidt Ocean Institute ROV SuBastian Dive 350—Cloates Canyon, Australia-FK200308, Timestamp: 00:40:06—YouTube. Available online: https://www.youtube.com/watch?v=zRDXpc_4gE8&t=2406s (accessed on 5 January 2022).
- Schmidt Ocean Institute ROV SuBastian Dive 396 (Pt C)—Rodda Canyon, Australia-FK200930, Timestamp: 00:33:55 -YouTube. Available online: https://www.youtube.com/watch?v=tuFJFf6P4kY&t=2035s (accessed on 17 December 2021).
- Robinson, G.; Davies, J.B.C. The Amadeus Project: An Overview. Ind. Robot. 1997, 24, 290–296. [Google Scholar] [CrossRef]
- Lane, D.M.; O’Brien, D.J.; Pickett, M.; Davies, J.B.C.; Robinson, G.; Jones, D.; Scott, E.; Casalino, G.; Bartolini, G.; Cannata, G.; et al. AMADEUS: Advanced Manipulation for Deep Underwater Sampling. IEEE Robot. Autom. Mag. 1997, 4, 34–45. [Google Scholar] [CrossRef] [Green Version]
- Lane, D.M.; Davies, J.B.C.; Robinson, G.; O’Brien, D.J.; Sneddon, J.; Seaton, E.; Elfstrom, A. The AMADEUS Dextrous Subsea Hand: Design, Modeling, and Sensor Processing. IEEE J. Ocean. Eng. 1999, 24, 96–111. [Google Scholar] [CrossRef]
- Bartolini, G.; Coccoli, M. Discontinuous Control of an Underwater Manipulator by a Simplex of Constant Control Vectors. In Proceedings of the IEEE Conference on Decision and Control, Phoenix, AZ, USA, 7–10 December 1999; Volume 4, pp. 3242–3247. [Google Scholar]
- Bartolini, G.; Coccoli, M. Summary of the Design and Realization of a Robotic Finger Based on Innovative Concepts. In Proceedings of the 1999 IEEE/ASME International Conference on Advanced Intelligent Mechatronics, AIM 1999, Atlanta, GA, USA, 19–23 September 1999; pp. 416–421. [Google Scholar] [CrossRef]
- Qingxin, M.; Hua, W.; Ping, L.; Liquan, W.; Ze, H. Dexterous Underwater Robot Hand: HEU Hand II. In Proceedings of the 2006 IEEE International Conference on Mechatronics and Automation, ICMA 2006, Luoyang, China, 25–28 June 2006; Volume 2006, pp. 1477–1482. [Google Scholar]
- Wang, H.; Huang, X.; Qi, X.; Meng, Q. Development of Underwater Robot Hand and Its Finger Tracking Control. In Proceedings of the IEEE International Conference on Automation and Logistics, ICAL 2007, Jinan, China, 18–21 August 2007; pp. 2973–2977. [Google Scholar]
- Lemburg, J.; Kampmann, P.; Kirchner, F. A Small-Scale Actuator with Passive-Compliance for a Fine-Manipulation Deep-Sea Manipulator. In Proceedings of the OCEANS’11-MTS/IEEE Kona, Waikoloa, HA, USA, 19–22 September 2011; IEEE Computer Society: Washington, DC, USA, 2011. [Google Scholar]
- Kampmann, P.; Kirchner, F. Towards a Fine-Manipulation System with Tactile Feedback for Deep-Sea Environments. Robot. Auton. Syst. 2015, 67, 115–121. [Google Scholar] [CrossRef]
- Kampmann, P.; Büskens, C.; Wang, S.; Wübben, D.; Dekorsy, A. Adaptive Control for Underwater Gripping Systems. In Intelligent Systems, Control and Automation: Science and Engineering; Springer: Dordrecht, The Netherlands; Berlin/Heidelberg, Germany, 2020; Volume 96, pp. 117–124. [Google Scholar]
- Takemura, F.; Shiroku, R.T.; Kawabata, K.; Sagara, S. Development of Easy-Removable Underwater Manipulator Unit with Built-in Controller. J. Robot. Mechatron. 2013, 25, 778–784. [Google Scholar] [CrossRef]
- Stuart, H.S.; Wang, S.; Gardineer, B.; Christensen, D.L.; Aukes, D.M.; Cutkosky, M. A Compliant Underactuated Hand with Suction Flow for Underwater Mobile Manipulation. In Proceedings of the Proceedings—IEEE International Conference on Robotics and Automation, Hong Kong, China, 31 May–5 June 2014; pp. 6691–6697. [Google Scholar]
- Stuart, H.S.; Wang, S.; Cutkosky, M.R. Tunable Contact Conditions and Grasp Hydrodynamics Using Gentle Fingertip Suction. IEEE Trans. Robot. 2019, 35, 295–306. [Google Scholar] [CrossRef]
- Stuart, H.S.; Bagheri, M.; Wang, S.; Barnard, H.; Sheng, A.L.; Jenkins, M.; Cutkosky, M.R. Suction Helps in a Pinch: Improving Underwater Manipulation with Gentle Suction Flow. In Proceedings of the IEEE International Conference on Intelligent Robots and Systems, Hamburg, Germany, 28 September–2 October 2015; Volume 2015, pp. 2279–2284. [Google Scholar]
- Nadeau, P.; Abbott, M.; Melville, D.; Stuart, H.S. Tactile Sensing Based on Fingertip Suction Flow for Submerged Dexterous Manipulation. In Proceedings of the 2020 IEEE International Conference on Robotics and Automation, Paris, France, 31 May–31 August 2020; pp. 3701–3707. [Google Scholar]
- Irawan, A.; Yin, T.Y.; Lezaini, W.M.N.W.; Razali, A.R.; Yusof, M.S.M. Reconfigurable Foot-to-Gripper Leg for Underwater Bottom Operator, Hexaquad. In Proceedings of the USYS 2016–2016 IEEE 6th International Conference on Underwater System Technology: Theory and Applications, Scenic Island, Penang, Malaysia, 6 April 2017; pp. 94–99. [Google Scholar]
- Barbieri, L.; Bruno, F.; Gallo, A.; Muzzupappa, M.; Russo, M.L. Design, Prototyping and Testing of a Modular Small-Sized Underwater Robotic Arm Controlled through a Master-Slave Approach. Ocean. Eng. 2018, 158, 253–262. [Google Scholar] [CrossRef]
- Takeuchi, K.; Nomura, S.; Tamamoto, T.; Sakagami, N.; Koganezawa, K. Development of Multi-Joint Gripper for Underwater Operations. In Proceedings of the 2018 OCEANS-MTS/IEEE Kobe Techno-Oceans, OCEANS-Kobe, Port Island, Kobe, 4 December 2018. [Google Scholar]
- Sakagami, N.; Takeuchi, K.; Koganezawa, K. Numerical and Experimental Testing of Underwater Gripper with Adjustable Stiffness Joints. In Proceedings of the Proceedings of the 2020 IEEE/SICE International Symposium on System Integration, SII 2020, Honolulu, HI, USA, 1 January 2020; pp. 1118–1122. [Google Scholar]
- Zhou, J.; Chen, Y.; Hu, Y.; Wang, Z.; Li, Y.; Gu, G.; Liu, Y. Adaptive Variable Stiffness Particle Phalange for Robust and Durable Robotic Grasping. Soft Robot. 2020, 7, 743–757. [Google Scholar] [CrossRef] [PubMed]
- German Research Center for Artificial Intelligence SeeGrip: Pressure Chamber, Timestamp: 00:00:08—YouTube. Available online: https://www.youtube.com/watch?v=XyIM-NlZDlA&t=8s (accessed on 4 September 2021).
- Tessler, M.; Brugler, M.R.; Burns, J.A.; Sinatra, N.R.; Vogt, D.M.; Varma, A.; Xiao, M.; Wood, R.J.; Gruber, D.F. Ultra-Gentle Soft Robotic Fingers Induce Minimal Transcriptomic Response in a Fragile Marine Animal. Curr. Biol. 2020, 30, R157–R158. [Google Scholar] [CrossRef]
- Bemfica, J.R.; Melchiorri, C.; Moriello, L.; Palli, G.; Scarcia, U.; Vassura, G. Mechatronic Design of a Three-Fingered Gripper for Underwater Applications. Proc. IFAC Proc. Vol. 2013, 46, 307–312. [Google Scholar] [CrossRef]
- Ribas, D.; Ridao, P.; Turetta, A.; Melchiorri, C.; Palli, G.; Fernandez, J.J.; Sanz, P.J. I-AUV Mechatronics Integration for the TRIDENT FP7 Project. IEEE/ASME Trans. Mechatron. 2015, 20, 2583–2592. [Google Scholar] [CrossRef]
- Bemfica, J.R.; Melchiorri, C.; Moriello, L.; Palli, G.; Scarcia, U. A Three-Fingered Cable-Driven Gripper for Underwater Applications. In Proceedings of the Proceedings-IEEE International Conference on Robotics and Automation, Hong Kong, China, 22 September 2014; pp. 2469–2474. [Google Scholar]
- Palli, G.; Moriello, L.; Scarcia, U.; Melchiorri, C. An Underwater Robotic Gripper with Embedded Force/Torque Wrist Sensor. Proc. IFAC-Pap. 2017, 50, 11209–11214. [Google Scholar]
- Simetti, E.; Wanderlingh, F.; Torelli, S.; Bibuli, M.; Odetti, A.; Bruzzone, G.; Rizzini, D.L.; Aleotti, J.; Palli, G.; Moriello, L.; et al. Autonomous Underwater Intervention: Experimental Results of the MARIS Project. IEEE J. Ocean. Eng. 2018, 43, 620–639. [Google Scholar] [CrossRef]
- Arienti, A.; Calisti, M.; Giorgio-Serchi, F.; Laschi, C. PoseiDRONE: Design of a Soft-Bodied ROV with Crawling, Swimming and Manipulation Ability. In Proceedings of the 2013 OCEANS, San Diego, CA, USA, 23–27 September 2013; pp. 1–7. [Google Scholar]
- Calisti, M.; Arienti, A.; Renda, F.; Levy, G.; Hochner, B.; Mazzolai, B.; Dario, P.; Laschi, C. Design and Development of a Soft Robot with Crawling and Grasping Capabilities. In Proceedings of the IEEE International Conference on Robotics and Automation, St Paul, MN, USA, 14–19 May 2012; pp. 4950–4955. [Google Scholar]
- Ishizu, K.; Nakayama, H.; Sakagami, N.; Shibata, M.; Kawamura, S.; Matsuda, S.; Mitsui, A. Preliminary Experiments of a Human-Portable Underwater Gripper Robot for Dexterous Tasks. In Proceedings of the OCEANS 2014, Taipei, Taiwan, 20 November 2014. [Google Scholar]
- Spadafora, F.; Muzzupappa, M.; Bruno, F.; Ribas, D.; Ridao, P. Design and Construction of a Robot Hand Prototype for Underwater Applications. In Proceedings of the IFAC-PapersOnLine, Sozopol, Bulgaria, 24–27 September 2015; Elsevier: Amsterdam, The Netherlands, 2015; Volume 28, pp. 294–299. [Google Scholar]
- Gong, Z.; Chen, B.; Liu, J.; Fang, X.; Liu, Z.; Wang, T.; Wen, L. An Opposite-Bending-and-Extension Soft Robotic Manipulator for Delicate Grasping in Shallow Water. Front. Robot. AI 2019, 6, 26. [Google Scholar] [CrossRef] [Green Version]
- Gong, Z.; Fang, X.; Chen, X.; Cheng, J.; Xie, Z.; Liu, J.; Chen, B.; Yang, H.; Kong, S.; Hao, Y.; et al. A Soft Manipulator for Efficient Delicate Grasping in Shallow Water: Modeling, Control, and Real-World Experiments. Int. J. Robot. Res. 2021, 40, 449–469. [Google Scholar] [CrossRef]
- Hao, Y.; Gong, Z.; Xie, Z.; Guan, S.; Yang, X.; Wang, T.; Wen, L. A Soft Bionic Gripper with Variable Effective Length. J. Bionic Eng. 2018, 15, 220–235. [Google Scholar] [CrossRef]
- Liu, J.; Iacoponi, S.; Laschi, C.; Wen, L.; Calisti, M. Underwater Mobile Manipulation: A Soft Arm on a Benthic Legged Robot. IEEE Robot. Autom. Mag. 2020, 27, 12–26. [Google Scholar] [CrossRef]
- Cai, M.; Wang, Y.; Wang, S.; Wang, R.; Ren, Y.; Tan, M. Grasping Marine Products with Hybrid-Driven Underwater Vehicle-Manipulator System. IEEE Trans. Autom. Sci. Eng. 2020, 17, 1443–1454. [Google Scholar] [CrossRef]
- Phillips, B.T.; Becker, K.P.; Kurumaya, S.; Galloway, K.C.; Whittredge, G.; Vogt, D.M.; Teeple, C.B.; Rosen, M.H.; Pieribone, V.A.; Gruber, D.F.; et al. A Dexterous, Glove-Based Teleoperable Low-Power Soft Robotic Arm for Delicate Deep-Sea Biological Exploration. Sci. Rep. 2018, 8, 14779. [Google Scholar] [CrossRef] [Green Version]
- Vogt, D.M.; Becker, K.P.; Phillips, B.T.; Graule, M.A.; Rotjan, R.D.; Shank, T.M.; Cordes, E.E.; Wood, R.J.; Gruber, D.F. Shipboard Design and Fabrication of Custom 3D-Printed Soft Robotic Manipulators for the Investigation of Delicate Deep-Sea Organisms. PLoS ONE 2018, 13, e0200386. [Google Scholar] [CrossRef]
- Teoh, Z.E.; Phillips, B.T.; Becker, K.P.; Whittredge, G.; Weaver, J.C.; Hoberman, C.; Gruber, D.F.; Wood, R.J. Rotary-Actuated Folding Polyhedrons for Midwater Investigation of Delicate Marine Organisms. Sci. Robot. 2018, 3, eaat5276. [Google Scholar] [CrossRef] [Green Version]
- Schmidt Ocean Institute Reaching Towards Deep-Sea Digital “Holotypes”-Schmidt Ocean Institute. Available online: https://schmidtocean.org/cruise-log-post/reaching-towards-deep-sea-digital-holotypes (accessed on 6 November 2021).
- Licht, S.; Collins, E.; Ballat-Durand, D.; Lopes-Mendes, M. Universal Jamming Grippers for Deep-Sea Manipulation. In Proceedings of the OCEANS 2016 MTS/IEEE Monterey, OCE 2016, Monterey, CA, USA, 28 November 2016. [Google Scholar]
- Licht, S.; Collins, E.; Mendes, M.L.; Baxter, C. Stronger at Depth: Jamming Grippers as Deep Sea Sampling Tools. Soft Robot. 2017, 4, 305–316. [Google Scholar] [CrossRef]
- Licht, S.; Collins, E.; Badlissi, G.; Rizzo, D. A Partially Filled Jamming Gripper for Underwater Recovery of Objects Resting on Soft Surfaces. In Proceedings of the IEEE International Conference on Intelligent Robots and Systems, Madrid, Spain, 1–5 October 2018; pp. 6461–6468. [Google Scholar]
- Brantner, G.; Khatib, O. Controlling Ocean One: Human–Robot Collaboration for Deep-Sea Manipulation. J. Field Robot. 2021, 38, 28–51. [Google Scholar] [CrossRef]
- Khatib, O.; Yeh, X.; Brantner, G.; Soe, B.; Kim, B.; Ganguly, S.; Stuart, H.; Wang, S.; Cutkosky, M.; Edsinger, A.; et al. Ocean One: A Robotic Avatar for Oceanic Discovery. IEEE Robot. Autom. Mag. 2016, 23, 20–29. [Google Scholar] [CrossRef]
- Stuart, H.; Wang, S.; Khatib, O.; Cutkosky, M.R. The Ocean One Hands: An Adaptive Design for Robust Marine Manipulation. Int. J. Robot. Res. 2017, 36, 150–166. [Google Scholar] [CrossRef]
- Backus, S.B.; Onishi, R.; Bocklund, A.; Berg, A.; Contreras, E.D.; Parness, A. Design and Testing of the JPL-Nautilus Gripper for Deep-Ocean Geological Sampling. J. Field Robot. 2020, 37, 972–986. [Google Scholar] [CrossRef]
- Wang, Y.; Gregory, C.; Minor, M.A. Improving Mechanical Properties of Molded Silicone Rubber for Soft Robotics. Through Fabr. Compos. 2018, 5, 272–290. [Google Scholar] [CrossRef]
- Aggarwal, A.; Kirchner, F. Object Recognition and Localization: The Role of Tactile Sensors. Sensors 2014, 14, 3227–3266. [Google Scholar] [CrossRef] [PubMed] [Green Version]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| String 1 | String 2 | |
|---|---|---|
| ALL | gripper OR manipulation OR finger OR hand | |
| AND | ||
| TITLE-ABS-KEY | underwater OR deep-sea OR marine OR subsea | |
| AND | ||
| TITLE-ABS-KEY | robot* OR “end effector” | - |
| SRC TITLE | - | robot * OR (ocean * AND engineering) OR (marine AND technology) OR (autonomous AND vehicle) OR (mts AND ocean) |
| Inclusion Criteria | Exclusion Criteria |
|---|---|
| Design and modelling of grippers whose potential application underwater is proposed but not considered in design or test phase |
| Decisional algorithms for task planning for underwater autonomous manipulation. |
| Design, modelling, control and sensing for manipulators, AUV or other type of robots |
| Pure sciences articles (Engineering, Biology, Chemistry, Sea Sciences, etc.) |
|
| Gripper | Ref. | Year | Technology | #Fingers | #Joints | #Actuators | Weight | Dimensions | Finger Movement | Force/Torque/Speed |
| AMADEUS | [31,32,33,34,35] | 1998 | Mixed | 3 | 6 | 1 | 3.5 kg | L 365 mm | 20 mm | P: 15.45 N |
| HEU II | [36,37] | 2006 | Rigid | 3 | 9 | 3 | - | FL 130 mm | Joints: 75°, 40°, 75° | 0.35 Nm, 1 Nm, 1 Nm |
| SeeGrip | [38,39,40] | 2011 | Rigid | 3 | 6 | 1 | - | FL 297 mm | - | - |
| Okinawa | [41] | 2014 | Rigid | 2 | 2 | 2 | - | L 200 mm | Roll: 360°, Open: 90° | 5.9 Nm/28.0 rpm |
| Stanford | [42,43,44,45] | 2014 | Mixed | 4 | 12 | 4 | - | - | - | - |
| Malaysia Pahang | [46] | 2017 | Rigid | 2 | 2 | 1 | - | - | - | 40 ÷ 180 N |
| Calabria | [47] | 2018 | Rigid | 2 or 4 | 5 or 9 | 2 | - | LF 130 mm | Joint 3: 90° | - |
| Tokai | [48,49] | 2018 | Rigid | 2 | 8 | 4 | F 1.5 kg | LF 216 mm, WF 83 mm | - | - |
| Wyss Ultragentle | [18] | 2019 | Soft | 6 (or 4) | n.a. | 1 | 123 g | L ~150 mm Palm W 78 mm D 45 mm | - | NO: 0.0455 ± 0.007 kPa by each actuator |
| VSPP-3 | [50] | 2020 | Mixed | 3 | 2 | 2 | 460 g | L 130 mm, Ø 170 mm | - | <5 N per finger |
| Gripper | Actuation | Transmission | Sensors | |||||||
| AMADEUS | H: Fixed displacement gear pump | Pressure reducing valve, control valves (9 to the bellows, 1 to knuckle j.), metal bellows, knuckle joints, cardan joints | F: Strain gauges (tip); P: Potentiometer (knuckle j.); H: Pressure transducer (act.); C: PVDF (slip). | |||||||
| HEU II | E: DC Servomotor, Maxon | Bevel gear | F: Strain gauges (tip); P: Hall effect rotary encoders (j.) | |||||||
| SeeGrip | H | Control valves, piston, parallel linkage | F: Strain gauges; P: Absolute encoders; C: Piezoelectric (texture, slip) and optoelectronic (distribution). | |||||||
| Okinawa | E: DC geared motor | Tendons, worm gears, magnet coupling | P: Rotary encoder. | |||||||
| Stanford | E, Return springs | Pulley, tendon | F: Hall sensors and magnet; C: Estimate from suction flow | |||||||
| Malaysia Pahang | E: DC Indirect drive motor | Puller shaft and scissoring mechanism | F: Estimated from load current | |||||||
| Calabria | E: Servomotor | Gear wheel and crown wheel (wrist). Self-locking mechanism (finger): worm screw and two couples of gear wheels | - | |||||||
| Tokai | E: DC micromotor, 24 W, Faulhaber 2342S024CR | Drive: Timing belt, diff. gears mechanism Tensioning: wire spring | C: Estimated from the angle of the base gear | |||||||
| Wyss Ultragentle | H | Control valves, Tubing | - | |||||||
| VSPP-3 | P | Tubing | - | |||||||
| Gripper | Sealing Measures | Target | Test Depth | Tested Objects | ||||||
| AMADEUS | D: Oil filled case, O-ring S: Silicon embedding, O-ring (connector) | Obj. 10 ÷ 150 mm | LT, G | O: Metallic cylinder, can W: Rock, 75 mm in diameter and less than 1 kg | ||||||
| HEU II | O-ring (silent seal); Silent ring, bevel and bush (shaft, bearing) | - | LT, P | O: Tennis ball, egg, pen, card, bottle, screwdriver | ||||||
| SeeGrip | M, S: Oil filled glove | Spheres or cylinders, apple-sized | LT, G | O in 600 bar tank: Sphere Ø 8 cm | ||||||
| Okinawa | D: Pressure tight case | Starfish collection | LT, G | W: Payload of 3 kg | ||||||
| Stanford | - | Precision pinch (small obj.) and secure envelop grasp (tools) | LT, G | W: Lego Block, PVC cylinder Ø 5 cm | ||||||
| Malaysia Pahang | M: Aluminum parts | Obj. 50 ÷ 200 mm | LT, G | W: Metallic cylinder, prism and plate, 30 ÷ 60 g | ||||||
| Calabria | D: Case enclosure and O-ring | - | P | O: Ball, plastic prism W: Cylinder, Carafe <1.5 kg in water | ||||||
| Tokai | D: Magnetic coupling T: Gasket, o-ring, watertight bulkhead | Envelope grasp, stability against current. Obj. Ø 120 mm, 100 g | LT, G | W: Bowl Ø 13 cm | ||||||
| Wyss Ultragentle | - | Aurelia aurita, Catostylus mosaicus, and Mastigias papua (7 to 10 cm) jellyfishes | LT, G | W: Silicone synthetic jellyfishes, A. aurita, C. mosaicus and M. papua | ||||||
| VSPP-3 | Glue | Compliance to spines, even if pierced | LT, G | W: Durian, cactus, pineapple, pitaya, apple, grape, egg, cherry, cabbage, eggplant, drill, plier, hammer, Rubik cube and a pyramid | ||||||
| Gripper | Ref. | Year | Technology | #Fingers | #Joints | #Actuators | Weight | Dimensions | Finger Movement | Force/Torque/Speed |
| TRIDENT-Skin | [53] | 2013 | Mixed | 3 | 6 | 6 | 4.5 kg | L 300 mm W 250 mm | - | 150 N per finger |
| PoseiDRONE | [58,59] | 2013 | Soft | 1 | - | 1 | - | LF 245 mm | - | - |
| TRIDENT-UNIBO | [54,55] | 2014 | Rigid | 3 | 8 | 3 | 4.6 kg | LF 200 mm | Joints: 150°, 150°, 60°(abd.) | 150 N per finger |
| ARTEMI | [60] | 2014 | Rigid | 7 | 2 | 2 | - | LF 450 mm | Roll: 360°, Open: 90° | Roll: 90°/s, Open: 20°/s |
| GUH14 | [61] | 2015 | Rigid | 3 | 9 | 3 | - | - | Joint 1: 120° | - |
| UJIOne | [54] | 2015 | Rigid | 4 | 2 | 1 | 3.93 kg | L 276 mm D 130 mm W 561 mm | - | - |
| MARIS | [56,57] | 2017 | Rigid | 3 | 8 | 3 | 4.6 kg | - | Joints: 150°, 150°, 60°(abd.) | 150 N per finger |
| IIT SoftHand | [17] | 2018 | Rigid | 5 | 19 | 1 | 2 kg | L 170 mm Ø 95 mm | - | L 400 N, Pi 20 N, Po 76 N |
| IIT Gripper | [17] | 2018 | Rigid | 4 | - | 1 | 2 kg | L 170 mm Ø 95 mm | - | Lift 150 N |
| OBSS | [62,63,64] | 2019 | Soft | 4 | n.a. | 1 | - | LF 100 mm | x: 145 mm, y: 110 mm | Pull off. 2 ÷ 10 N |
| Silver | [65] | 2020 | Soft | 4 | n.a. | 1 | - | L 125 mm Ø 48 mm | - | - |
| Tshingua | [66] | 2020 | Rigid | n.a. | 1 | 1 | - | - | 90° | - |
| Gripper | Actuation | Transmission | Sensors | |||||||
| TRIDENT-Skin | E: Rotational motors | Worm gears | F, C: Optoelectronic | |||||||
| PoseiDRONE | E: Gear Motor GM12a Mini Metal | Tendons | - | |||||||
| TRIDENT-UNIBO | E: DC Brushless motor,12 W, Faulhaber | Worm gear, driving and joint pulleys, tendons routed around sheaths. Bicycle break-like mechanism (pretensioning) | F, C: Optoelectronic | |||||||
| ARTEMI | E: DC Geared motor | Gears | P: Optical encoders | |||||||
| GUH14 | E: Servomotors, Hitec hs5646 | Driving gear, belt, driven gears. Tendon (last two phalanges). | - | |||||||
| UJIOne | E: Servomotor Dynamixel AX-18F | Worm drive, spur gear | F: Strain gauge; C: FlexiForce. | |||||||
| MARIS | E: DC Brushless motor,12 W, Faulhaber | Worm gear (non-back-drivability) and tendons | F: Force/Torque (wrist) | |||||||
| IIT SoftHand | E: DC Gear motor, 12 V, Maxon DCX 22 | Magnetic coupling, Gears and tendons | P: Magnetic encoders | |||||||
| IIT Gripper | E: DC Gear motor, 12 V, Maxon DCX 22 | Magnetic coupling, Gears and tendons | P: Magnetic encoders | |||||||
| OBSS | P | Tubing | - | |||||||
| Silver | P | Tubing | - | |||||||
| Tshingua | E: Servomotor | Passive gears in pinion and rack set | - | |||||||
| Gripper | Sealing Measures | Target | Test Depth | Tested Objects | ||||||
| TRIDENT-Skin | M: Deformable silicon skin to be filled with incompressible oil mechanically pressed on the frame | Obj. Ø 5 ÷ 350 mm | P 5 m | W: Dummy black-box | ||||||
| PoseiDRONE | M: Silicone embedding | Wrapping around objects to hold them or to keep robot position | S 3 m | W: Cylinder, screwdriver | ||||||
| TRIDENT-UNIBO | D: Aluminum box with O-rings, PTFE-ring (shaft), Epoxy resin (supply and communication cable) | Obj. 5 ÷ 200 mm at 25 m depth, various grasp types | S 25 m | O: Bottle, card, pen, big box W: black box | ||||||
| ARTEMI | D: Watertight housing | Cylinders Ø 50 ÷ 500 mm | P 1.5 m | W: Thin pipe 1.5 kg, trash bin, T-bar handle | ||||||
| GUH14 | O-rings (static) Bulkhead, double o-ring (dynamic) | Cylinders Ø 120 mm, Boxes 220 mm at 60 m depth | S 15 m, T | - | ||||||
| UJIOne | D: Cylindrical capsule; O-ring (connector); Lip ring seal (shaft). S: Self amalgamating tape. | Contingency plan while finishing the development of UNIBO | P | W: Dummy black-box | ||||||
| MARIS | D: Sealed independent capsule, O-rings (motor), PTFE-ring (shaft), Epoxy resin (supply and communication cable) | Obj. 5 ÷ 200 mm at 50 m depth, various grasp types, non-back-drivability | P | W: Cylinder Ø 10 cm | ||||||
| IIT SoftHand | D: watertight pressure-compensated chamber (electronics and motor) | Fine maintenance operations | S 10 m | O: Foam, metallic piece. W: Coin, vase shard, phantom coral and plant, valve. | ||||||
| IIT Gripper | D: watertight pressure-compensated chamber (electronics and motor) | Industrial diving scenario | S 10 m | O: Foam, metallic piece, paper tube, plastic sphere. W: Vase shards. | ||||||
| OBSS | Balancing Ambient/actuator pressure | Delicate grasping of sea organisms | S 10 m | O: Sphere 170 mm, beaker, cactus, CD, egg, milk bag, cylinders and cuboids. W: Sea urchins, cucumbers and shells | ||||||
| Silver | - | Delicate sample collection | S 1.2 m | W: Eggshell, plastic bottle, silicone seashell, plastic bag, finishing net | ||||||
| Tshingua | Waterproof cylinder base | Low-cost lightweight gripper for marine species | S | W: Sea urchins, cucumber and scallop | ||||||
| Gripper | Ref. | Year | Technology | #Fingers | #Joints | #Actuators | Weight | Dimensions | Finger Movement | Force/Torque/Speed |
| Wyss Boa | [10] | 2016 | Soft | 1 + 2 (scissor) | 1 | 1 | - | LF 300 mm W 100 mm, D 110 mm | - | Pull 40 N Slip 30 N |
| Wyss Bellow | [10,67] | 2016 | Soft | 4 + 2 (scissor) | 1 | 1 | - | LF 130 mm W 100 mm, D 110 mm | - | Pull 15 N Slip 5 N |
| Universal Jamming gripper | [71,72,73] | 2016 | Mixed | n.a. | n.a. | 1 | 1.6 kg w/o particles | L 198 mm Ø 70 mm | - | 18 ÷ 34 N |
| Ocean One | [45,74,75,76] | 2017 | Mixed | 3 | 9 | 1 | 0.8 kg | L 94 mm W 150 mm D ~ 180 mm | Proximal Twist 20° Bend 110°; Medial: 120° | - |
| Wyss 3DP | [68] | 2018 | Soft | 3 | n.a. | 1 | - | - | - | - |
| Wyss Bellow v2 | [67,68] | 2018 | Soft | 2 (or 3 or 5) | n.a. | 1 | - | - | - | P: 16.6 N NO: 0,96 N |
| Wyss RAD | [69] | 2018 | Rigid | n.a. | ~48 | 1 | - | Max Ø 450 mm | n.a. | n.a. |
| JPL-Nautilus | [77] | 2020 | Rigid | 16 | 32 | 1 | - | L 750 mm | - | - |
| Gripper | Actuation | Transmission | Sensors | |||||||
| Wyss Boa | H (fingers), Arm push-pull rod (scissor) | Valves (fingers), Bowden cable and 4 bar linkage (scissor) | - | |||||||
| Wyss Bellow | H (fingers), Arm push-pull rod (scissor) | Solenoid Valves (fingers), Bowden cable and 4 bar linkage (scissor) | - | |||||||
| Universal Jamming gripper | H | - | P: Pressure sensor referenced to ambient pressure | |||||||
| Ocean One | E: brushless motor 70 W, Maxon EC-45; Return extension springs | Back-drivable gears, spring loaded winches that drives tendons | F: Pullout force estimated from suction flow | |||||||
| Wyss 3DP | H | Tubing | - | |||||||
| Wyss Bellow v2 | H | - | - | |||||||
| Wyss RAD | E: tilt motor, Saab Seaeye P00625 | Passive revolute joints | - | |||||||
| JPL-Nautilus | Handle impressed rotation | Lead screw, linear bearing, force balancing differential and tendons | - | |||||||
| Gripper | Sealing Measures | Target | Test Depth | Tested Objects | ||||||
| Wyss Boa | - | Quickly interchangeable soft gripper | 170 m | O: Cylinders Ø 1 to 5 cm W: Whip coral | ||||||
| Wyss Bellow | - | Quickly interchangeable soft gripper | 170 m | O: Cylinders Ø 5 cm W: Soft coral, Scleratinia | ||||||
| Universal Jamming gripper | O-rings (seal membrane and cap) | Universal compliant gripper | 1200 m | O: Plastic comb, a hairbrush, a paint brush, and a two-pound dive weight. W: Allen key, weighted hairbrush, lightbulb, metal spring, lightbulb, wine glass, shell, weighted GoPro housing, plastic safety glasses, clam shell | ||||||
| Ocean One | D: Pressure-compensated oil-filled chamber | Substitute human divers | 91 m | O: Battery, goblet, screwdriver, plate, Wood block, PVC Tube, Plastic pear, Mug, W: Rope, archeology tools, crate amphora | ||||||
| Wyss 3DP | 3000 m 1 atm housing with external power | - | 1950 m | W: Crinoid, sponge, coral, sea star, cucumber | ||||||
| Wyss Bellow v2 | 3000 m 1 atm housing with external power | Obj. up to Ø 140 mm | 2440 m | W: 5F: Holoturia 4F: Coral rubble 3F: Coral rubble, sponge, Fossil shelves, Pyrosome, Cirrothauma murrayi 2F: Holoturia, Hexatinellid sponge | ||||||
| Wyss RAD | D: oil-filled pressure compensated unit | Envelope delicate specimens | 645 m | W: Oegopsina sp. Squid, Stellamedusa ventana, Stigmatoteuthis sp. Squid | ||||||
| JPL-Nautilus | - | Grip curved surface with asperities | 2000 m | O: spheres from 4 to 33 diameter, rocks, seashell, asperity grasping test W: loose rocks and asperity grasping test | ||||||
 White spaces mean that we cannot state a priori whether the action is possible;
White spaces mean that we cannot state a priori whether the action is possible;  patterned spaces mean that we cannot state a priori whether the gripper has the ability to handle the tool.
patterned spaces mean that we cannot state a priori whether the gripper has the ability to handle the tool.  Shaded spaces represent not applicable cases.
White spaces mean that we cannot state a priori whether the action is possible; patterned spaces mean that we cannot state a priori whether the gripper has the ability to handle the tool. Shaded spaces represent not applicable cases.
Shaded spaces represent not applicable cases.
White spaces mean that we cannot state a priori whether the action is possible; patterned spaces mean that we cannot state a priori whether the gripper has the ability to handle the tool. Shaded spaces represent not applicable cases.| Atomic Manipulations | Push to Break | Scrape | Scrape with Tool | Scoop | Scoop with Tool | Core with Corer | Grip | Grip and Twist | Grip and Pull | Grip Tool | Cage | Cage and Pull | Suction on with tool | Suction and Store | Suction off with tool | Release | Release Tool | Pour | Pour with Tool | Suction on | Suction off | Scissor Cut | Lever | Pull (Hook) |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Gripper or tool | 1.1 | 2 | 2.A | 3 | 3.A | 4.A | 5 | 5.1 | 5.2 | 5.B | 6 | 6.1 | 7.A | 8.A | 9.A | 10 | 10.B | 11 | 11.A | 7. | 9. | 12. | 13. | 14. |
| Parallel fingers | ✓ | ✓ | T | x | T | T | ✓ | ✓ | ✓ | ✓ | x | x | T | T | T | ✓ | ✓ | x | ✓ | x | x | x | ✓ | ✓ |
| Intermeshed fingers | ✓ | ✓ | T | x | T | T | ✓ | ✓ | ✓ | ✓ | x | x | T | T | T | ✓ | ✓ | x | ✓ | x | x | x | ✓ | ✓ |
| Grabber | ✓ | ✓ | T | ✓ | T | T | x | x | x | x | ✓ | ✓ | T | T | T | ✓ | ✓ | ✓ | ✓ | x | x | x | x | x |
| Cage | x | x | T* | x | T* | T* | x | x | x | x | ✓ | ✓ | T* | T* | T* | ✓ | ✓ | x | x | x | x | x | x | x |
| Suction Sampler | T | T | T | T | ||||||||||||||||||||
| Push corer | T | M | ||||||||||||||||||||||
| Baskets | T | T | M | T | ||||||||||||||||||||
| Scoop | T | T | T | |||||||||||||||||||||
| Scoop net | T | T | M | T | ||||||||||||||||||||
| Trap | M | M | ||||||||||||||||||||||
| AMADEUS | | x | | | ✓ | | x | x | | | | ✓ | | x | | x | x | x | ||||||
| HEU II | | x | | | ✓ | | x | x | | | | ✓ | | x | | x | x | x | ||||||
| SeeGrip | | x | | | ✓ | | x | x | | | | ✓ | | x | | x | x | x | ||||||
| Okinawa | ✓* | ✓* | | x | | | ✓ | | x | x | | | | ✓ | | x | | x | x | x | ✓* | ✓* | ||
| Stanford | x | x | | x | | | ✓ | | x | x | | | | ✓ | | x | | ✓ | ✓ | x | x | |||
| Malaysia Pahang | ✓* | ✓* | | x | | | ✓ | | x | x | | | | ✓ | | x | | x | x | x | ✓* | ✓* | ||
| Calabria | x | x | | x | | | ✓ | | x | x | | | | ✓ | | x | | x | x | x | x | |||
| Tokai | | x | | | ✓ | | x | x | | | | ✓ | | x | | x | x | x | ||||||
| Wyss Ultragentle | x | x | | x | | | x* | | ✓ | | | | ✓ | | x | | x | x | x | x | ✓ | |||
| VSPP-3 | x | x | | x | | | ✓ | | x | x | | | | ✓ | | x | | x | x | x | x | |||
| TRIDENT-Skin | x | x | | x | | | ✓ | | x | x | | | | ✓ | | x | | x | x | x | x | |||
| PoseiDRONE | x | x | | x | | | ✓ | x* | | x | x | | | | ✓ | | x | | x | x | x | x | ||
| TRIDENT-UNIBO | x | x | | x | | | ✓ | | x | x | | | | ✓ | | x | | x | x | x | x | |||
| ARTEMI | ✓* | ✓* | | x | | | ✓ | ✓ | | x | x | | | | ✓ | | x | | x | x | x | ✓* | ✓* | |
| GUH14 | x | x | | x | | | ✓* | | x | x | | | | ✓* | | x | | x | x | x | x | |||
| UJIOne | | x | | | ✓ | | x | x | | | | ✓ | | x | | x | x | x | ✓ | |||||
| MARIS | x | x | | x | | | ✓ | | x | x | | | | ✓ | | x | | x | x | x | x | |||
| IIT SoftHand | x | x | | x | | | ✓ | ✓ | | x | x | | | | ✓ | | x | | x | x | x | x | x | |
| IIT Gripper | x | x | | x | | | ✓ | | x | x | | | | ✓ | | x | | x | x | x | x | x | ||
| OBSS | x | x | | x | | | ✓* | x* | | ✓ | | | | ✓ | | x | | x | x | x | x | |||
| Silver | x | x | | x | | | ✓ | x* | ✓ | | ✓ | ✓* | | | | ✓ | | x | | x | x | x | x | |
| Tshingua | x | x | | x | | | x | x | x | | ✓ | | | | ✓ | | x | | x | x | x | x | x | |
| Wyss Boa | x | x | | x | | | ✓ | x* | ✓ | | x | x | | | | ✓ | | x | | x | x | ✓ | x | |
| Wyss Bellow | x | x | | x | | | ✓ | | x | x | | | | ✓ | | x | | x | x | ✓ | x | |||
| Universal Jamming | x | x | | x | | | ✓ | ✓ | | ✓ | ✓ | | | | ✓ | | x | | x | x | x | x | x | |
| OceanOne | x | x | ✓ | x | ✓ | | ✓ | | x | x | | | | ✓ | | x | ✓ | ✓* | ✓* | x | x | |||
| Wyss 3DP | x | x | | x | | | ✓ | x* | | ✓ | | | | ✓ | | x | | x | x | x | x | |||
| Wyss Bellow v2 | x | x | | x | | | ✓ | x* | | ✓ | | | | ✓ | | x | | x | x | x | x | |||
| Wyss RAD | x | x | | x | | | x | x | x | | ✓ | x | | | | ✓ | | x | | x | x | x | x | x |
| JPL-Nautilus | x | x | | x | | | ✓ | | ✓ | | | | ✓ | | x | | x | x | x | x | ✓ |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mazzeo, A.; Aguzzi, J.; Calisti, M.; Canese, S.; Vecchi, F.; Stefanni, S.; Controzzi, M. Marine Robotics for Deep-Sea Specimen Collection: A Systematic Review of Underwater Grippers. Sensors 2022, 22, 648. https://doi.org/10.3390/s22020648
Mazzeo A, Aguzzi J, Calisti M, Canese S, Vecchi F, Stefanni S, Controzzi M. Marine Robotics for Deep-Sea Specimen Collection: A Systematic Review of Underwater Grippers. Sensors. 2022; 22(2):648. https://doi.org/10.3390/s22020648
Chicago/Turabian StyleMazzeo, Angela, Jacopo Aguzzi, Marcello Calisti, Simonepietro Canese, Fabrizio Vecchi, Sergio Stefanni, and Marco Controzzi. 2022. "Marine Robotics for Deep-Sea Specimen Collection: A Systematic Review of Underwater Grippers" Sensors 22, no. 2: 648. https://doi.org/10.3390/s22020648
APA StyleMazzeo, A., Aguzzi, J., Calisti, M., Canese, S., Vecchi, F., Stefanni, S., & Controzzi, M. (2022). Marine Robotics for Deep-Sea Specimen Collection: A Systematic Review of Underwater Grippers. Sensors, 22(2), 648. https://doi.org/10.3390/s22020648