
Compound Fault Diagnosis of a Wind Turbine Gearbox Based on MOMEDA and Parallel Parameter Optimized Resonant Sparse Decomposition


Abstract
:1. Introduction
2. Multipoint Optimal Minimum Entropy Deconvolution Adjusted
3. The Parallel Parameter Optimized RSSD Base on WOA
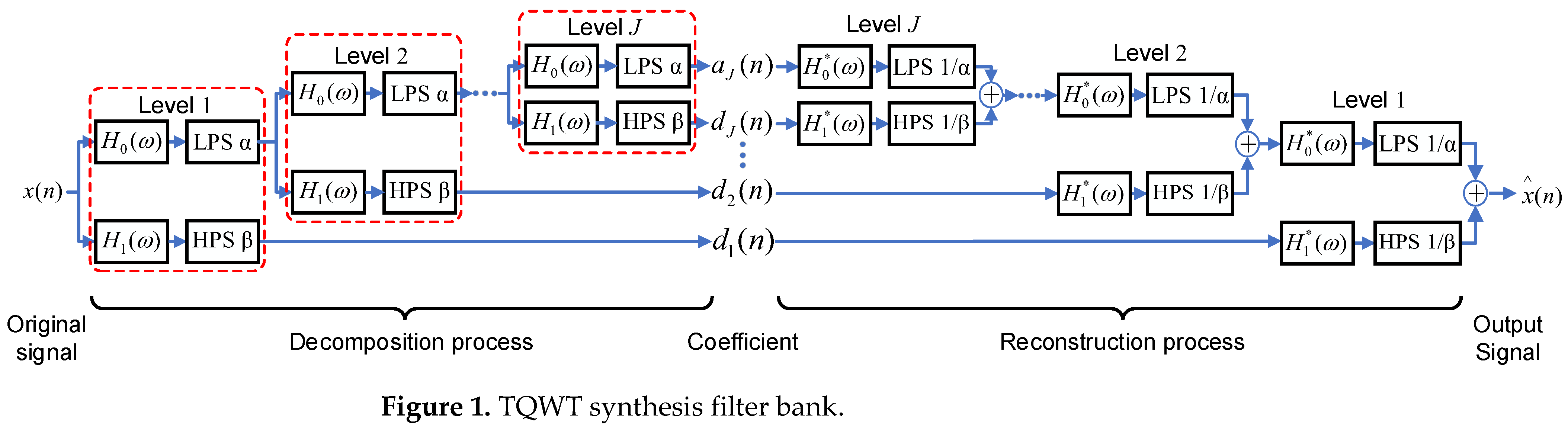
3.1. Tunable Q-Factor Wavelet Transform
3.2. Whale Optimization Algorithm
3.3. Design Objective Function
- (1)
- The parameters of the algorithm are determined: population size , population dimension , and the maximum number of iterations . For resonant sparse decomposition, it is required to find the optimal four parameters: , , , , so the dimension is set to = 4, the population size set to = 30, = 50.
- (2)
- Population initialization: The optimal parameters should be bounded, and the correlation between quality factors should be as low as possible. The value range of takes as [8,15], the value range of takes as [1,3], and the value range of redundancy factors and take as [2,5]. Then, to reduce the calculation, the accuracy of the four parameters is reserved to one single decimal.
- (3)
- The objective function value is calculated: the composite index constructed by kurtosis and envelope spectral entropy serves as the objective function. The objective function value of an individual is calculated and the current optimal individual is determined.
- (4)
- The main loop of the algorithm is entered: if and , the individual updates the current position by Equation (23), otherwise the individual position is updated by Equation (31). When , the position is updated according to Equation (29).
- (5)
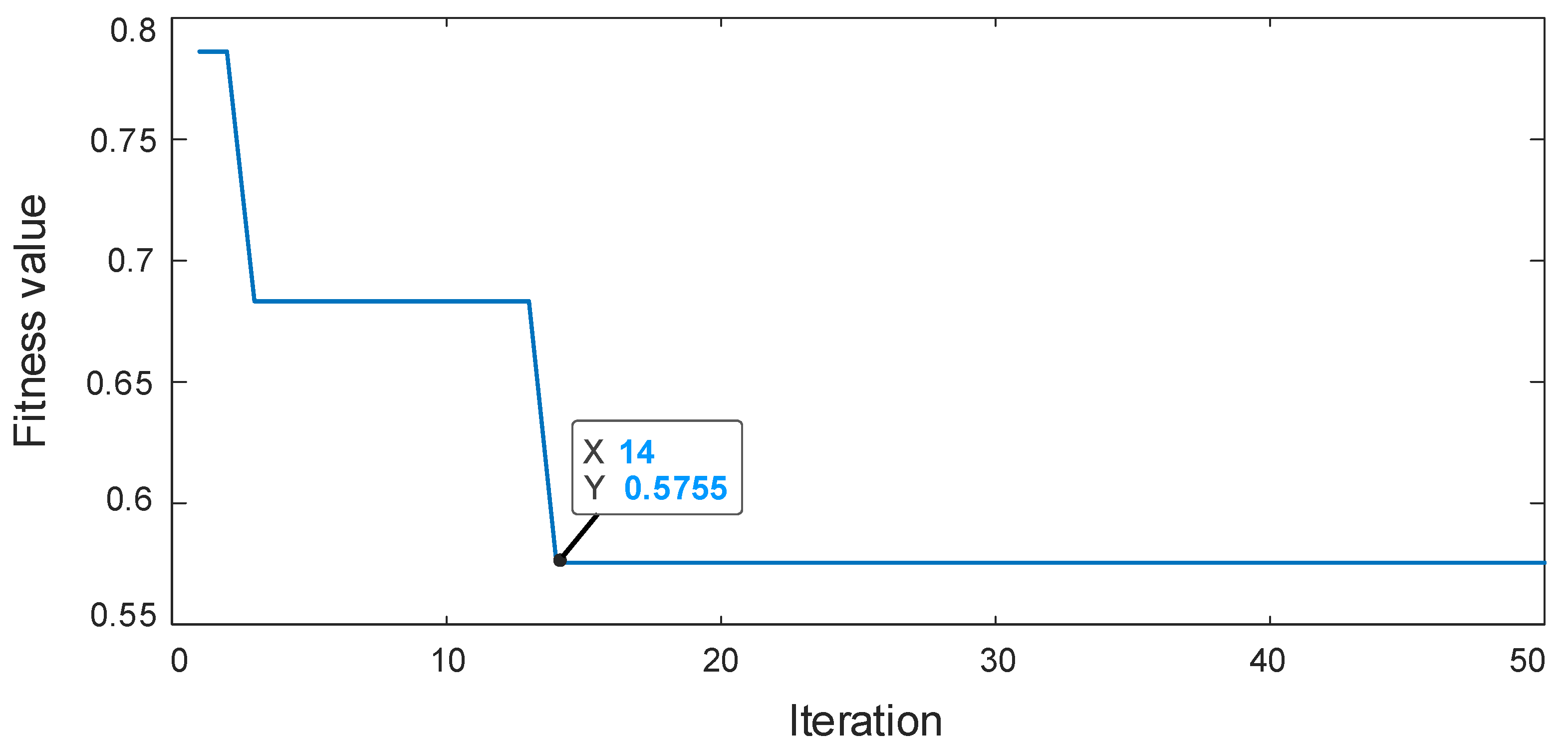
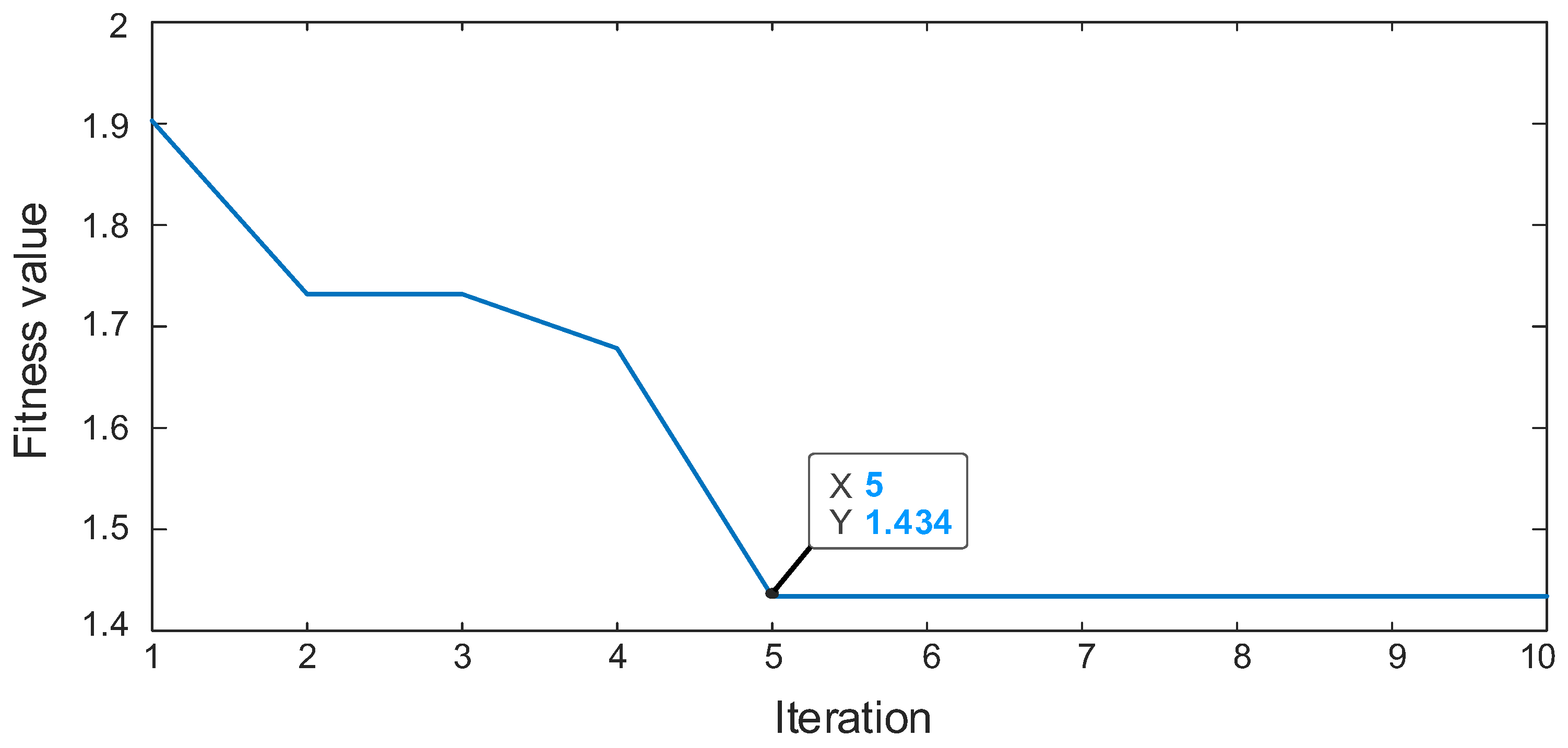
- Evaluating the whole whale population and iterative optimization until the algorithm converges, it obtains the optimal objective function value . Obtain the RSSD parameters after parallel optimization: , , , .
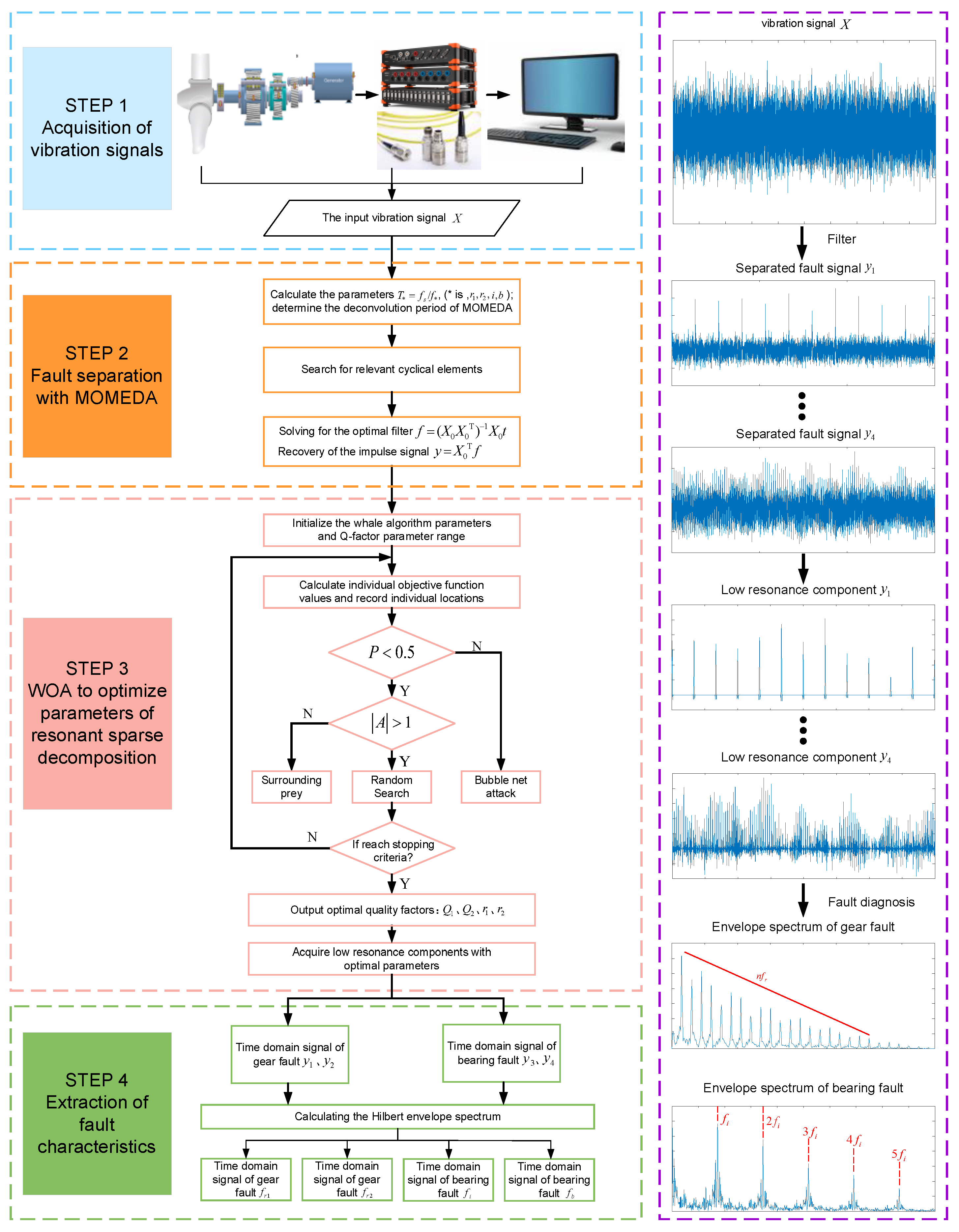
4. The Procedure of Compound Fault Diagnosis
5. Application of Proposed Method
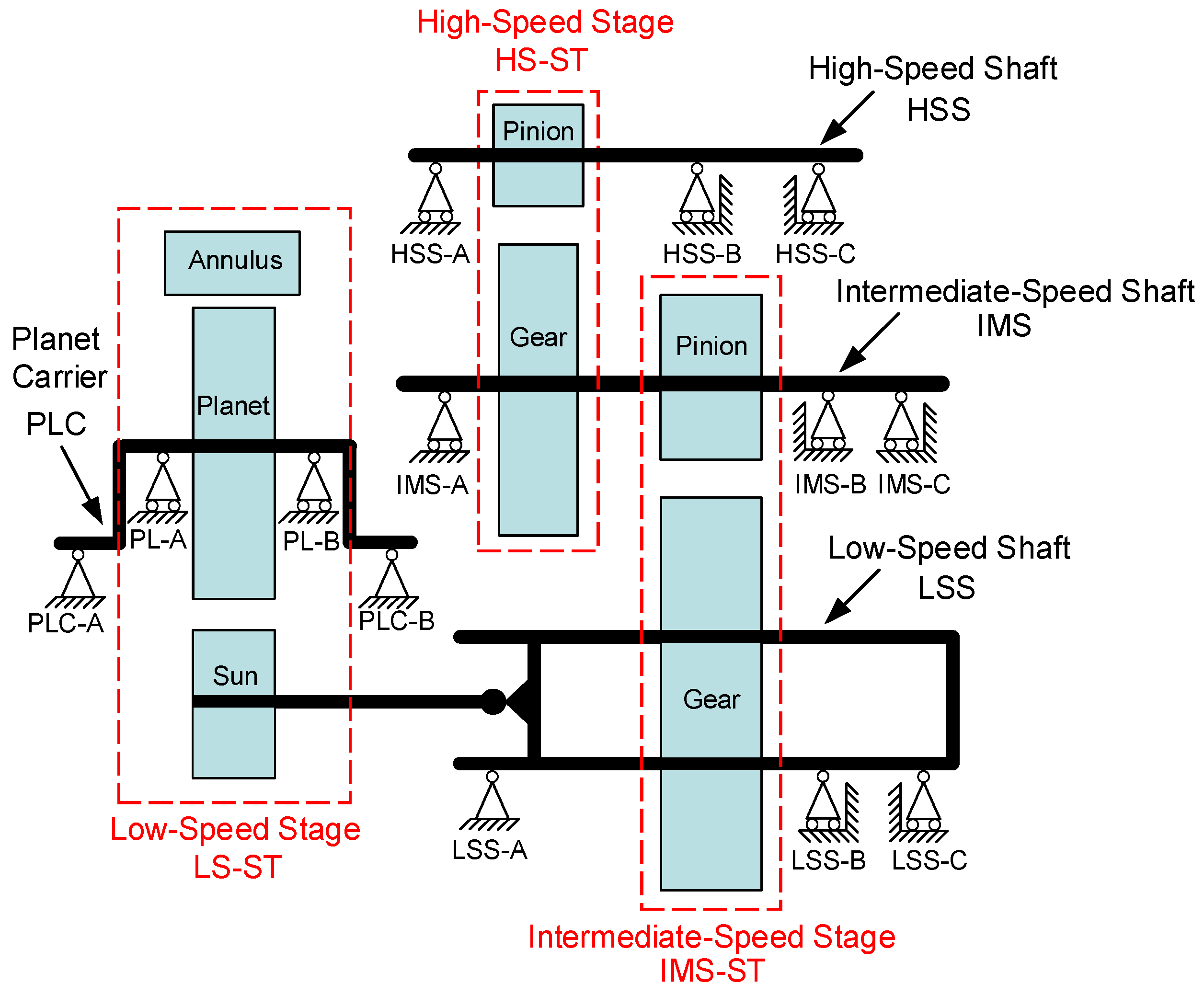
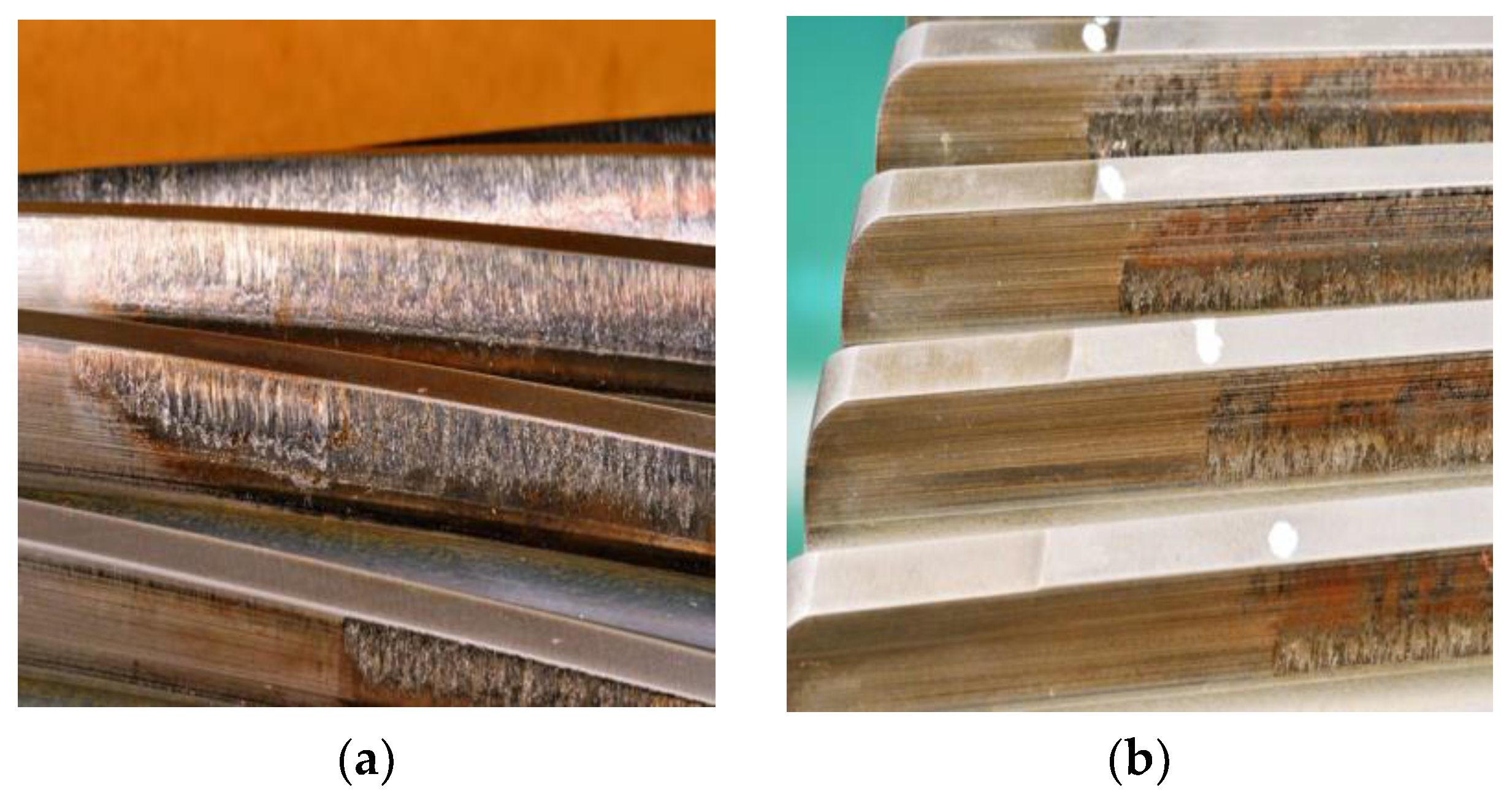
5.1. Experiment Introduction
5.2. Experiment Analysis
5.3. Comparative Analysis
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Teng, W.; Ding, X.; Tang, S.Y.; Xu, J.; Shi, B.S.; Liu, Y.B. Vibration Analysis for Fault Detection of Wind Turbine Drivetrains—A Comprehensive Investigation. Sensors 2021, 21, 1686. [Google Scholar] [CrossRef] [PubMed]
- Wu, X.; Wang, H.; Jiang, G.Q.; Xie, P.; Li, X.L. Monitoring Wind Turbine Gearbox with Echo State Network Modeling and Dynamic Threshold Using SCADA Vibration Data. Energies 2019, 12, 982. [Google Scholar] [CrossRef] [Green Version]
- Faysal, A.; Ngui, W.K.; Lim, M.H. Noise Eliminated Ensemble Empirical Mode Decomposition for Bearing Fault Diagnosis. J. Vib. Eng. Technol. 2021, 9, 2229–2245. [Google Scholar] [CrossRef]
- Wang, J.Y.; Li, J.G.; Wang, H.T.; Guo, L.X. Composite fault diagnosis of gearbox based on empirical mode decomposition and improved variational mode decomposition. J. Low Freq. Noise Vibr. Act. Control 2021, 40, 332–346. [Google Scholar] [CrossRef] [Green Version]
- Shao, H.D.; Xia, M.; Wan, J.F.; de Silva, C.W. Modified Stacked Autoencoder Using Adaptive Morlet Wavelet for Intelligent Fault Diagnosis of Rotating Machinery. IEEE-ASME Trans. Mechatron. 2022, 27, 24–33. [Google Scholar] [CrossRef]
- Wang, D.; Tsui, K.L.; Qin, Y. Optimization of segmentation fragments in empirical wavelet transform and its applications to extracting industrial bearing fault features. Measurement 2019, 133, 328–340. [Google Scholar] [CrossRef]
- Wang, Z.J.; Yang, N.N.; Li, N.P.; Du, W.H.; Wang, J.Y. A new fault diagnosis method based on adaptive spectrum mode extraction. Struct. Health Monit. Int. J. 2021, 20, 3354–3370. [Google Scholar] [CrossRef]
- Pang, B.; Nazari, M.; Sun, Z.D.; Li, J.Y.; Tang, G.J. An optimized variational mode extraction method for rolling bearing fault diagnosis. Struct. Health Monit. Int. J. 2022, 21, 558–570. [Google Scholar] [CrossRef]
- Zheng, J.D.; Tong, J.Y.; Ni, Q.; Pan, H.Y. Partial ensemble approach to resolve the mode mixing of extreme-point weighted mode decomposition. Digit. Signal Process. 2019, 89, 70–81. [Google Scholar] [CrossRef]
- Zheng, J.D.; Su, M.X.; Ying, W.M.; Tong, J.Y.; Pan, Z.W. Improved uniform phase empirical mode decomposition and its application in machinery fault diagnosis. Measurement 2021, 179, 109425. [Google Scholar] [CrossRef]
- Niu, Y.; Li, H.; Deng, W.; Fei, J.; Sun, Y.; Liu, Z. Rolling bearing fault diagnosis method based on TQWT and sparse representation. J. Traffic Transp. Eng. 2021, 21, 237–246. [Google Scholar]
- Cheng, J.; Yang, Y.; Li, X.; Cheng, J.S. Symplectic geometry packet decomposition and its applications to gear fault diagnosis. Mech. Syst. Signal Process. 2022, 174, 109096. [Google Scholar] [CrossRef]
- Endo, H.; Randall, R.B. Enhancement of autoregressive model based gear tooth fault detection technique by the use of minimum entropy deconvolution filter. Mech. Syst. Signal Process. 2007, 21, 906–919. [Google Scholar] [CrossRef]
- McDonald, G.L.; Zhao, Q.; Zuo, M.J. Maximum correlated Kurtosis deconvolution and application on gear tooth chip fault detection. Mech. Syst. Signal Process. 2012, 33, 237–255. [Google Scholar] [CrossRef]
- He, Q.; Guo, Y.; Wang, X.; Ren, Z.; Li, J. Gearbox Fault Diagnosis Based on RB-SSD and MCKD. China Mech. Eng. 2017, 28, 1528–1534. [Google Scholar]
- Yang, B.; Zhang, J.; Fan, G.; Wang, J.; Zhang, C. Application of MCKD and RSSD in Early Fault Diagnosis of Rolling Bearings. Noise Vib. Control 2018, 38, 154–161. [Google Scholar]
- Lyu, X.; Hu, Z.Q.; Zhou, H.L.; Wang, Q. Application of improved MCKD method based on QGA in planetary gear compound fault diagnosis. Measurement 2019, 139, 236–248. [Google Scholar] [CrossRef]
- McDonald, G.L.; Zhao, Q. Multipoint Optimal Minimum Entropy Deconvolution and Convolution Fix: Application to vibration fault detection. Mech. Syst. Signal Process. 2017, 82, 461–477. [Google Scholar] [CrossRef]
- Ma, H.Q.; Feng, Z.P. Planet bearing fault diagnosis using multipoint Optimal Minimum Entropy Deconvolution Adjusted. J. Sound Vib. 2019, 449, 235–273. [Google Scholar] [CrossRef]
- Wang, J.Y.; Wang, J.T.; Du, W.H.; Zhang, J.P.; Wang, Z.J.; Wang, G.J.; Li, T. Application of a New Enhanced Deconvolution Method in Gearbox Fault Diagnosis. Appl. Sci. 2019, 9, 5313. [Google Scholar] [CrossRef] [Green Version]
- Xiang, L.; Su, H.; Li, Y. Research on Extraction of Compound Fault Characteristics for Rolling Bearings in Wind Turbines. Entropy 2020, 22, 682. [Google Scholar] [CrossRef] [PubMed]
- Selesnick, I.W. Resonance-based signal decomposition: A new sparsity-enabled signal analysis method. Signal Process. 2011, 91, 2793–2809. [Google Scholar] [CrossRef]
- Selesnick, I.W. Wavelet transform with tunable Q-factor. IEEE Trans. Signal Process. 2011, 59, 3560–3575. [Google Scholar] [CrossRef]
- Lu, Y.F.; Xie, R.; Liang, S.Y. Extraction of weak fault using combined dual-tree wavelet and improved MCA for rolling bearings. Int. J. Adv. Manuf. Technol. 2019, 104, 2389–2400. [Google Scholar] [CrossRef]
- Wang, X.; Xie, P.; Guo, Y.; Wu, X.; Jiang, G.; He, Q. Impulse Fault Signature Extraction Based on Multi-Dictionary Resonance-Based Sparse Signal Decomposition. China Mech. Eng. 2019, 30, 2456–2462. [Google Scholar]
- Zhao, Z.B.; Qiao, B.J.; Wang, S.B.; Shen, Z.X.; Chen, X.F. A weighted multi-scale dictionary learning model and its applications on bearing fault diagnosis. J. Sound Vib. 2019, 446, 429–452. [Google Scholar] [CrossRef]
- Mirjalili, S.; Lewis, A. The Whale Optimization Algorithm. Adv. Eng. Softw. 2016, 95, 51–67. [Google Scholar] [CrossRef]
- Chen, J.L.; Zi, Y.Y.; He, Z.J.; Yuan, J. Improved spectral kurtosis with adaptive redundant multiwavelet packet and its applications for rotating machinery fault detection. Meas. Sci. Technol. 2012, 23, 045608. [Google Scholar] [CrossRef]
- Sheng, S. Wind Turbine Gearbox Condition Monitoring Round Robin Study—Vibration Analysis. Off. Sci. Tech. Inf. Tech. Rep. 2012, 68, 856–860. [Google Scholar]
- Gu, R.; Chen, J.; Hong, R.J.; Wang, H.; Wu, W.W. Incipient fault diagnosis of rolling bearings based on adaptive variational mode decomposition and Teager energy operator. Measurement 2020, 149, 106941. [Google Scholar] [CrossRef]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Gear Element | No. of Teeth | Root Diameter (mm) | Helix Angle | Face Width (mm) |
|---|---|---|---|---|
| Intermediate gear | 82 | 678 | 14R | 170 |
| Intermediate pinion | 23 | 174 | 14L | 186 |
| High-speed gear | 88 | 440 | 14R | 110 |
| High-speed pinion | 22 | 100 | 14L | 120 |
| Bearing Pitch diameter/mm | Large End of Rolling diameter/mm | Small End of Rolling diameter/mm | Number of rollers/N | Contact Angle (α/degree) |
|---|---|---|---|---|
| 155.00 | 24.22 | 19.03 | 20 | 11.63 |
| HSS Pinion Frequency | IMS Gear Frequency | Meshing Frequency | Bearing Inner Ring Fault | Bearing Rollers Fault |
|---|---|---|---|---|
| 30.00 | 7.50 | 660.00 | 345.30 | 93.51 |
| Value | MCKD | MCKD + RSSD | MOMEDA | Proposed Method |
|---|---|---|---|---|
| HSS pinion fault for FFC | 9.34% | 15.55% | 11.10% | 29.76% |
| IMS gear fault for FFC | 27.55% | 48.12% | 56.24% | 65.47% |
| Bearing inner ring fault for FFC | 0.68% | 1.35% | 1.64% | 5.83% |
| Bearing rollers fault for FFC | 1.20% | 4.17% | 3.40% | 11.83% |
| Method | MCKD | MCKD + RSSD | MOMEDA | Proposed Method |
|---|---|---|---|---|
| Time(s) | 23.69 | 450.48 | 4.58 | 280.85 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Feng, Y.; Zhang, X.; Jiang, H.; Li, J. Compound Fault Diagnosis of a Wind Turbine Gearbox Based on MOMEDA and Parallel Parameter Optimized Resonant Sparse Decomposition. Sensors 2022, 22, 8017. https://doi.org/10.3390/s22208017
Feng Y, Zhang X, Jiang H, Li J. Compound Fault Diagnosis of a Wind Turbine Gearbox Based on MOMEDA and Parallel Parameter Optimized Resonant Sparse Decomposition. Sensors. 2022; 22(20):8017. https://doi.org/10.3390/s22208017
Chicago/Turabian StyleFeng, Yang, Xiangfeng Zhang, Hong Jiang, and Jun Li. 2022. "Compound Fault Diagnosis of a Wind Turbine Gearbox Based on MOMEDA and Parallel Parameter Optimized Resonant Sparse Decomposition" Sensors 22, no. 20: 8017. https://doi.org/10.3390/s22208017
APA StyleFeng, Y., Zhang, X., Jiang, H., & Li, J. (2022). Compound Fault Diagnosis of a Wind Turbine Gearbox Based on MOMEDA and Parallel Parameter Optimized Resonant Sparse Decomposition. Sensors, 22(20), 8017. https://doi.org/10.3390/s22208017