
GNSS Based Low-Cost Magnetometer Calibration


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Magnetometer Calibration Based on GNSS
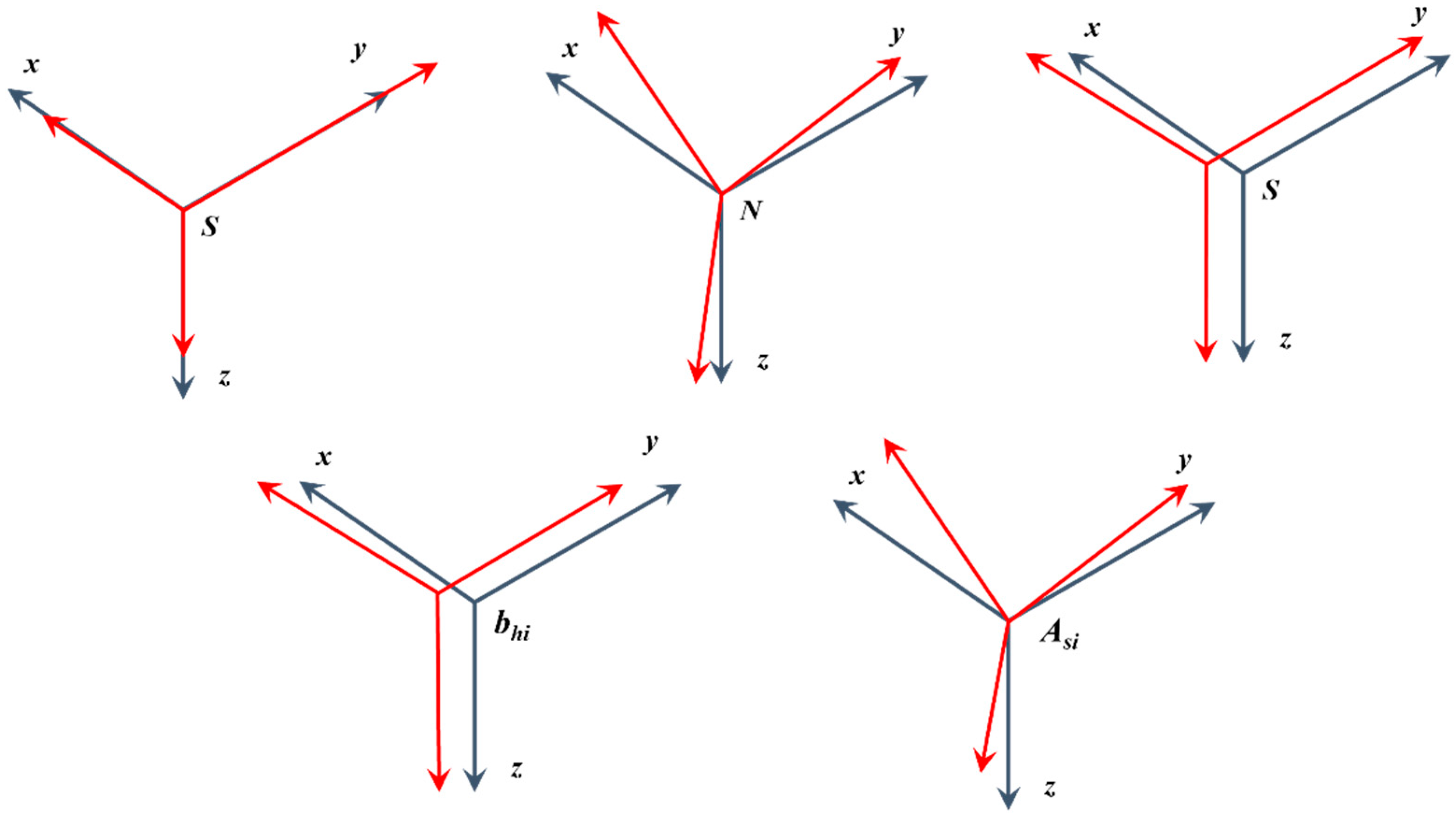
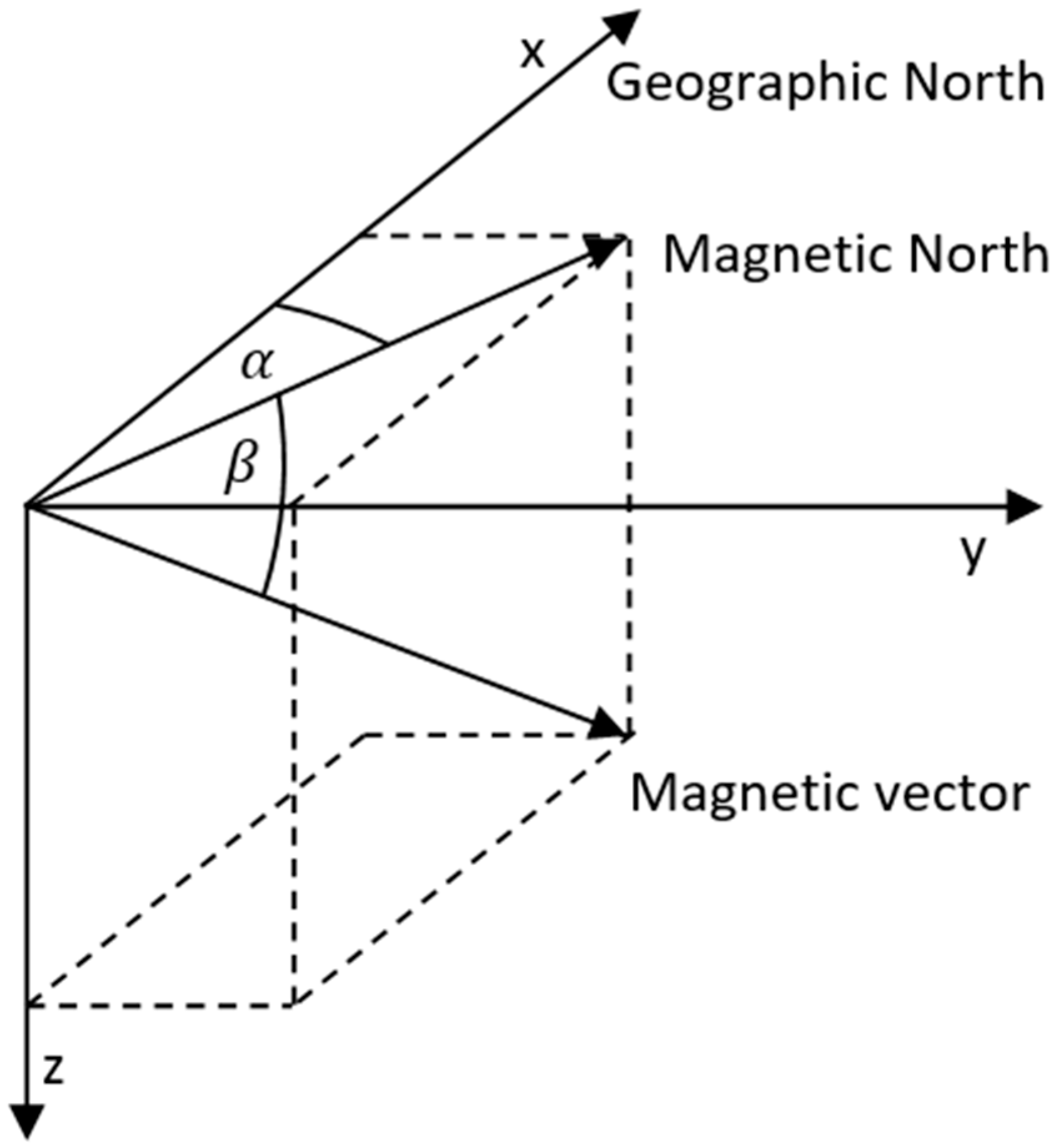
2.1. Magnetometer Error
2.2. GNSS Error
2.3. Calibration Options
3. Experimental Verification
3.1. Data Acquisition Module
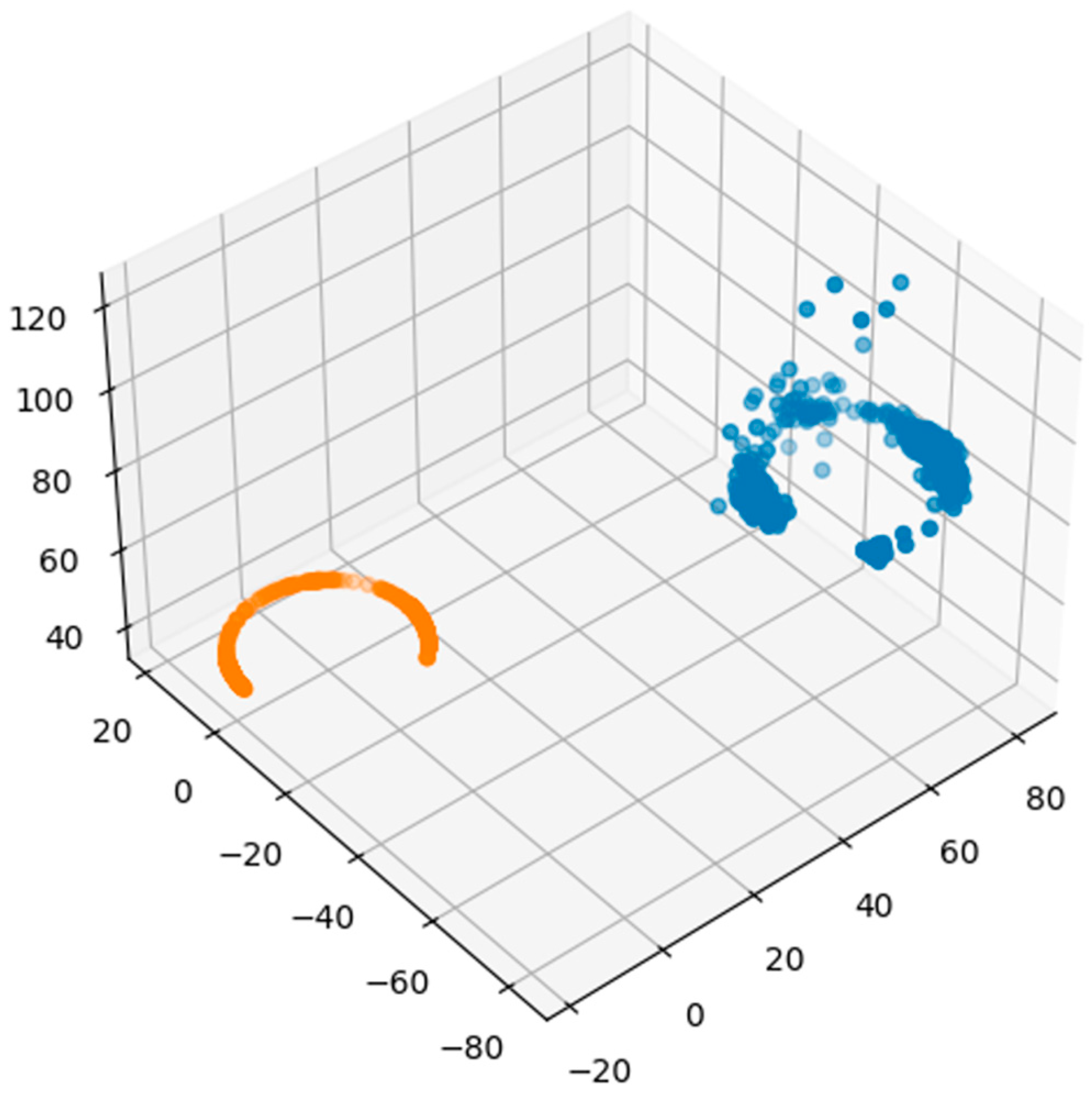
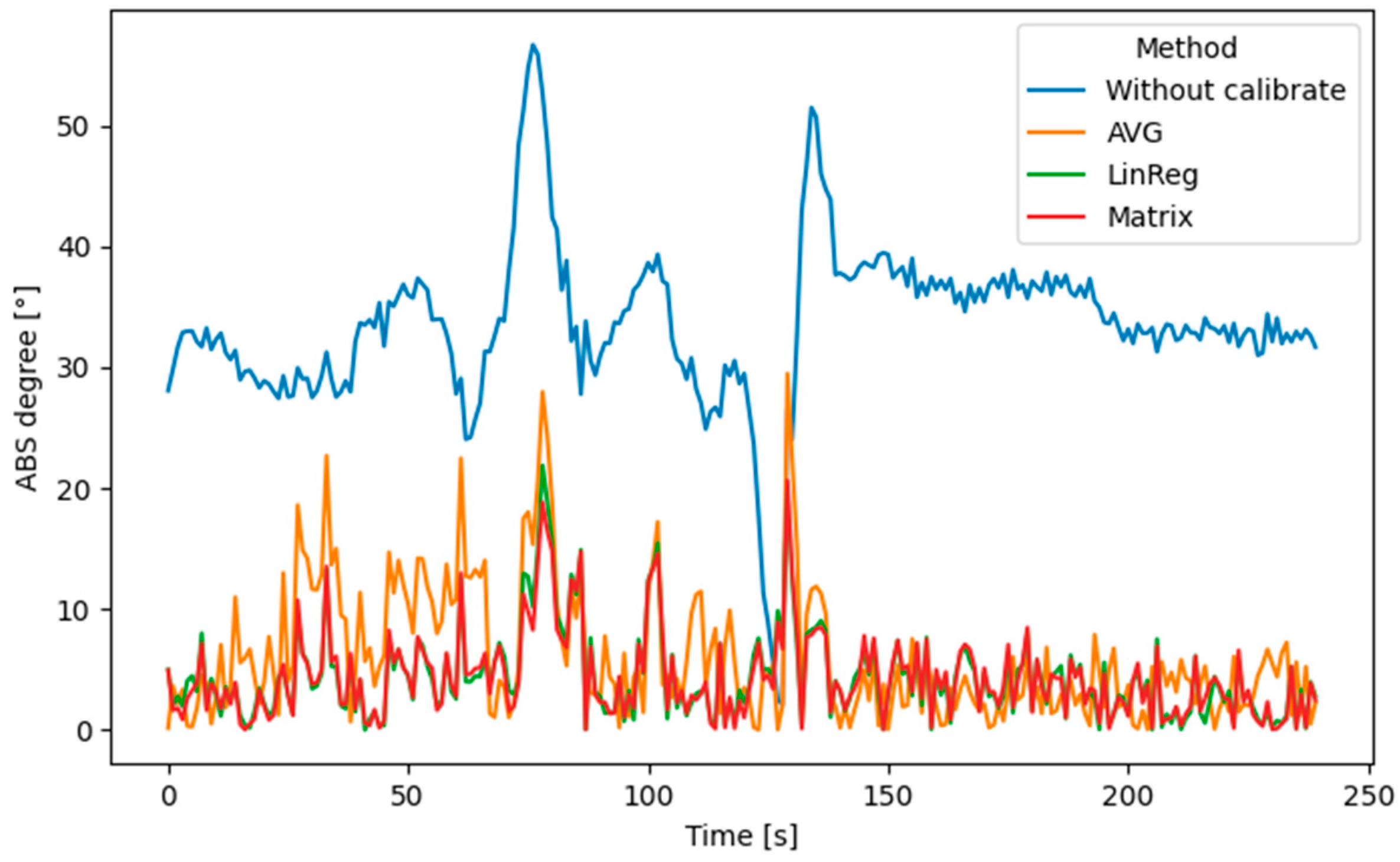
3.2. Data Processing
- without calibration: 33.6°,
- averaging error (AVG): 6.0°,
- linear regression (LinReg): 4.39°
- and calibration matrix estimation (Matrix): 4.33°.
4. Achieved Results
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Wu, J. Real-Time Magnetometer Disturbance Estimation via Online Nonlinear Programming. IEEE Sens. J. 2019, 19, 4405–4411. [Google Scholar] [CrossRef] [Green Version]
- Renaudin, V.; Afzal, M.H.; Lachapelle, G. Complete triaxis magnetometer calibration in the magnetic domain. J. Sens. 2010, 2010, 967245. [Google Scholar] [CrossRef] [Green Version]
- Vasconcelos, J.F.; Elkaim, G.; Silvestre, C.; Oliveira, P.; Cardeira, B. Geometric approach to strapdown magnetometer calibration in sensor frame. IEEE Trans. Aerosp. Electron. Syst. 2011, 47, 1293–1306. [Google Scholar] [CrossRef] [Green Version]
- Li, Q.; Griffiths, J.G. Least squares ellipsoid specific fitting. In Proceedings of the Geometric Modeling and Processing 2004, Beijing, China, 13–15 April 2004; pp. 335–340. [Google Scholar] [CrossRef]
- Li, S.; Cheng, D.; Gao, Q.; Wang, Y.; Yue, L.; Wang, M.; Zhao, J. An Improved Calibration Method for the Misalignment Error of a Triaxial Magnetometer and Inertial Navigation System in a Three-Component Magnetic Survey System. Appl. Sci. 2020, 10, 6707. [Google Scholar] [CrossRef]
- Wu, Y.; Shi, W. On Calibration of Three-Axis Magnetometer. IEEE Sens. J. 2015, 15, 6424–6431. [Google Scholar] [CrossRef] [Green Version]
- Han, K.; Han, H.; Wang, Z.; Xu, F. Extended Kalman filter-based gyroscope-aided magnetometer calibration for consumer electronic devices. IEEE Sens. J. 2017, 17, 63–71. [Google Scholar] [CrossRef]
- Wu, Y.; Zou, D.; Liu, P.; Yu, W. Dynamic Magnetometer Calibration and Alignment to Inertial Sensors by Kalman Filtering. IEEE Trans. Control Syst. Technol. 2018, 26, 716–723. [Google Scholar] [CrossRef] [Green Version]
- Cao, G.; Xu, X.; Xu, D. Real-Time Calibration of Magnetometers Using the RLS/ML Algorithm. Sensors 2020, 20, 535. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Bonnet, S.; Bassompierre, C.; Godin, C.; Lesecq, S.; Barraud, A. Calibration methods for inertial and magnetic sensors. Sens. Actuators A Phys. 2009, 156, 302–311. [Google Scholar] [CrossRef]
- Salehi, S.; Mostofi, N.; Bleser, G. A practical in-field magnetometer calibration method for IMUs. In Proceedings of the IROS Workshop Cognitive Assistive Systems: Closing the Action-Perception Loop, Vilamoura, Portugal, 7–12 October 2012; pp. 39–44. [Google Scholar]
- Li, X.; Li, Z. A new calibration method for tri-axial field sensors in strap-down navigation systems. Meas. Sci. Technol. 2012, 23, 105105. [Google Scholar] [CrossRef]
- Yang, D.; You, Z.; Li, B.; Duan, W.; Yuan, B. Complete Tri-Axis Magnetometer Calibration with a Gyro Auxiliary. Sensors 2017, 17, 1223. [Google Scholar] [CrossRef] [PubMed]
- Claesson, E.; Marklund, S. Calibration of IMUs Using Neural Networks and Adaptive Techniques—Targeting a Self-Calibrated IMU. Master’s Thesis, Chalmers University of Technology, Gothenburg, Sweden, 2019. Available online: https://odr.chalmers.se/bitstream/20.500.12380/256912/1/256912.pdf (accessed on 23 June 2022).
- Wu, Z.; Wang, W. Magnetometer and Gyroscope Calibration Method with Level Rotation. Sensors 2018, 18, 748. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Opromolla, R. Magnetometer Calibration for Small Unmanned Aerial Vehicles Using Cooperative Flight Data. Sensors 2020, 20, 538. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Henkel, P.; Berthold, P.; Kiam, J.J. Calibration of magnetic field sensors with two mass-market GNSS receivers. In Proceedings of the 2014 11th Workshop on Positioning, Navigation and Communication (WPNC), Dresden, Germany, 12–13 March 2014; pp. 1–5. [Google Scholar] [CrossRef] [Green Version]
- Henkel, P. Calibration of Magnetometers with GNSS Receivers and Magnetometer-Aided GNSS Ambiguity Fixing. Sensors 2017, 17, 1324. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Jonas, M. Mathematical and experimental analysis of GNSS horizontal and vertical errors. In Proceedings of the 2014 24th International Conference Radioelektronika, Bratislava, Slovakia, 15–16 April 2014; pp. 1–4. [Google Scholar] [CrossRef]
- Tang, D.; Lu, D.; Cai, B.; Wang, J. GNSS Localization Propagation Error Estimation Considering Environmental Conditions. In Proceedings of the 2018 16th International Conference on Intelligent Transportation Systems Telecommunications (ITST), Lisboa, Portugal, 15–17 October 2018; pp. 1–7. [Google Scholar] [CrossRef]
- Dautermann, T.; Ludwig, T.; Geister, R.; Ehmke, L. Enabling LPV for GLS equipped aircraft using an airborne SBAS to GBAS converter. In Proceedings of the 2019 IEEE/AIAA 38th Digital Avionics Systems Conference (DASC), San Diego, CA, USA, 8–12 September 2019; pp. 1–7. [Google Scholar] [CrossRef]
- Fortunato, M.; Critchley-Marrows, J.; Siutkowska, M.; Ivanovici, M.L.; Benedetti, E.; Roberts, W. Enabling High Accuracy Dynamic Applications in Urban Environments Using PPP and RTK on Android Multi-Frequency and Multi-GNSS Smartphones. In Proceedings of the 2019 European Navigation Conference (ENC), Warsaw, Poland, 9–12 April 2019; pp. 1–9. [Google Scholar] [CrossRef]
- InvenSense Inc. MPU-9250 Product Specification, Revision 1.1. Available online: https://invensense.tdk.com/wp-content/uploads/2015/02/PS-MPU-9250A-01-v1.1.pdf (accessed on 23 June 2022).
- u-blox. NEO-6 u-blox 6 GPS Modules, Data Sheet. Available online: https://content.u-blox.com/sites/default/files/products/documents/NEO-6_DataSheet_%28GPS.G6-HW-09005%29.pdf (accessed on 23 June 2022).







Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Andel, J.; Šimák, V.; Kanálikova, A.; Pirník, R. GNSS Based Low-Cost Magnetometer Calibration. Sensors 2022, 22, 8447. https://doi.org/10.3390/s22218447
Andel J, Šimák V, Kanálikova A, Pirník R. GNSS Based Low-Cost Magnetometer Calibration. Sensors. 2022; 22(21):8447. https://doi.org/10.3390/s22218447
Chicago/Turabian StyleAndel, Ján, Vojtech Šimák, Alžbeta Kanálikova, and Rastislav Pirník. 2022. "GNSS Based Low-Cost Magnetometer Calibration" Sensors 22, no. 21: 8447. https://doi.org/10.3390/s22218447
APA StyleAndel, J., Šimák, V., Kanálikova, A., & Pirník, R. (2022). GNSS Based Low-Cost Magnetometer Calibration. Sensors, 22(21), 8447. https://doi.org/10.3390/s22218447