
Monocular Pose Estimation of an Uncooperative Spacecraft Using Convexity Defect Features



Abstract
:1. Introduction
- The existing pose estimation algorithms are developed and examined for a specific spacecraft shape.
- The pose estimation performance analyses often overlook the effect of the relative pose.
- We introduce a novel pose initialization algorithm that can apply to target spacecraft with different shapes. This algorithm utilizes a convexity defect to narrow down the search space in the model matching step.
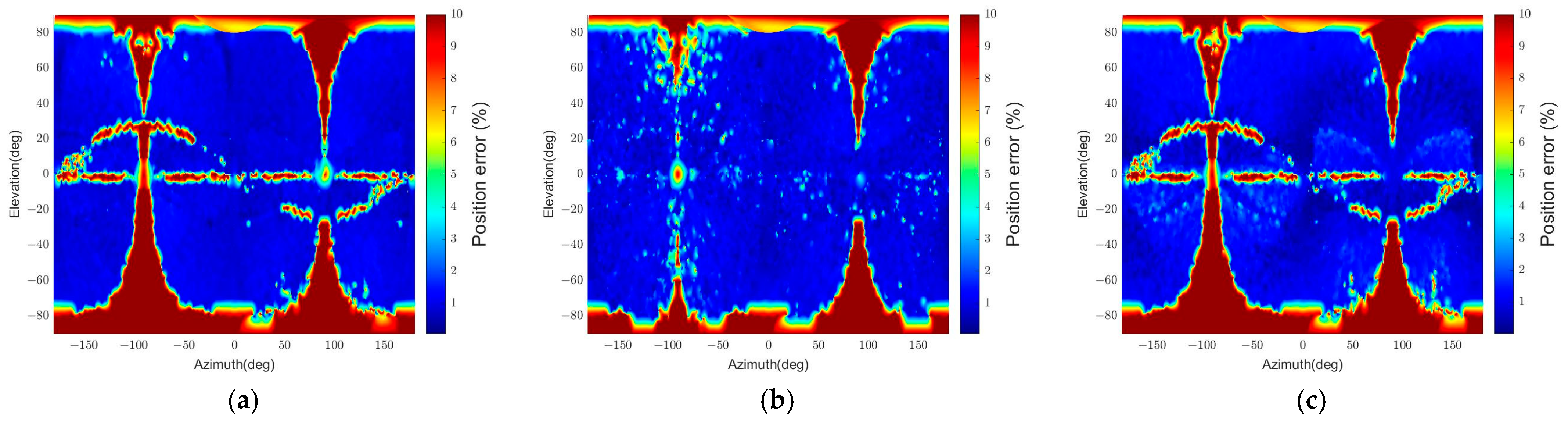
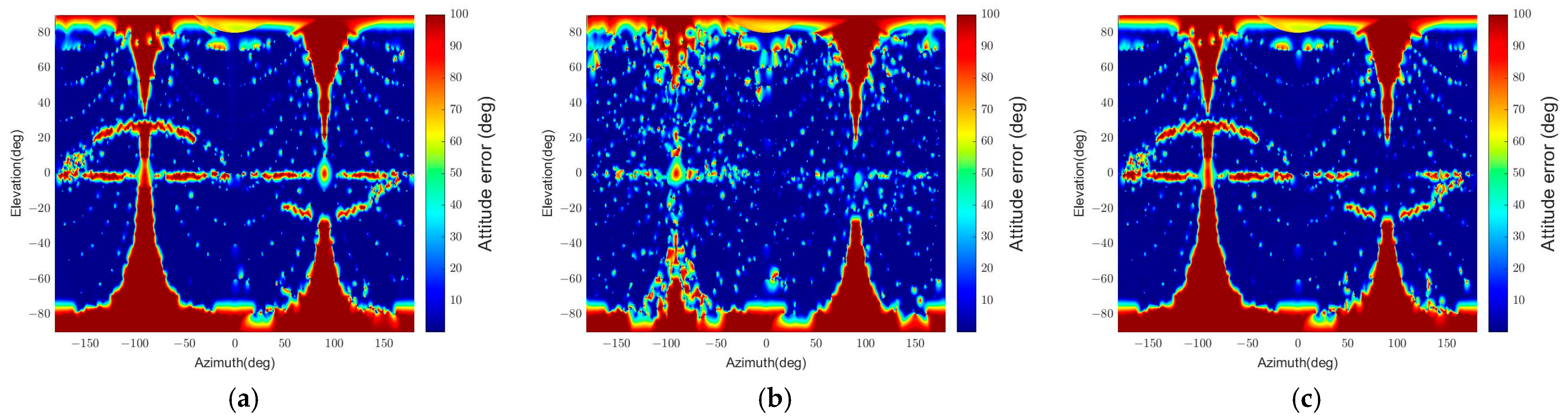
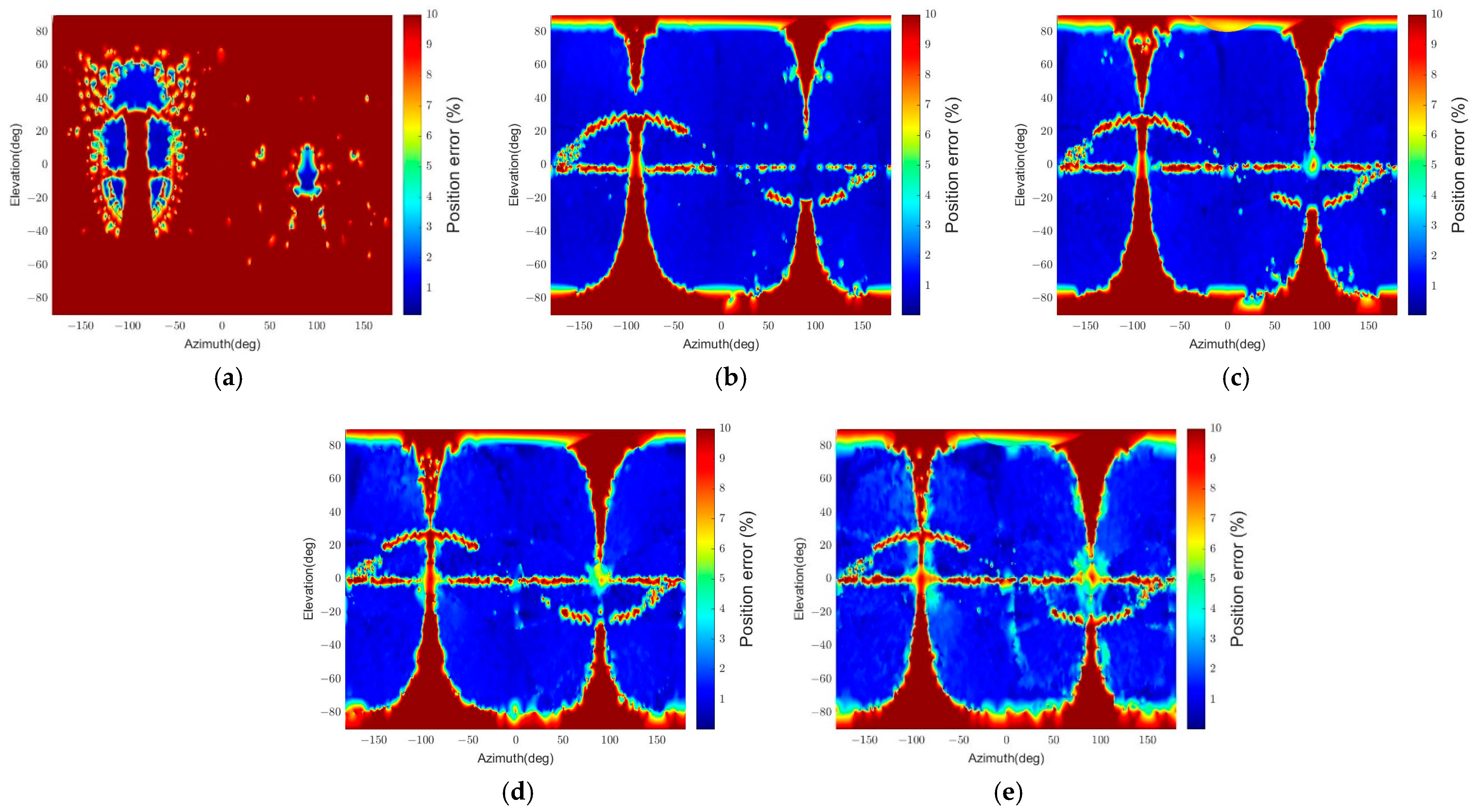
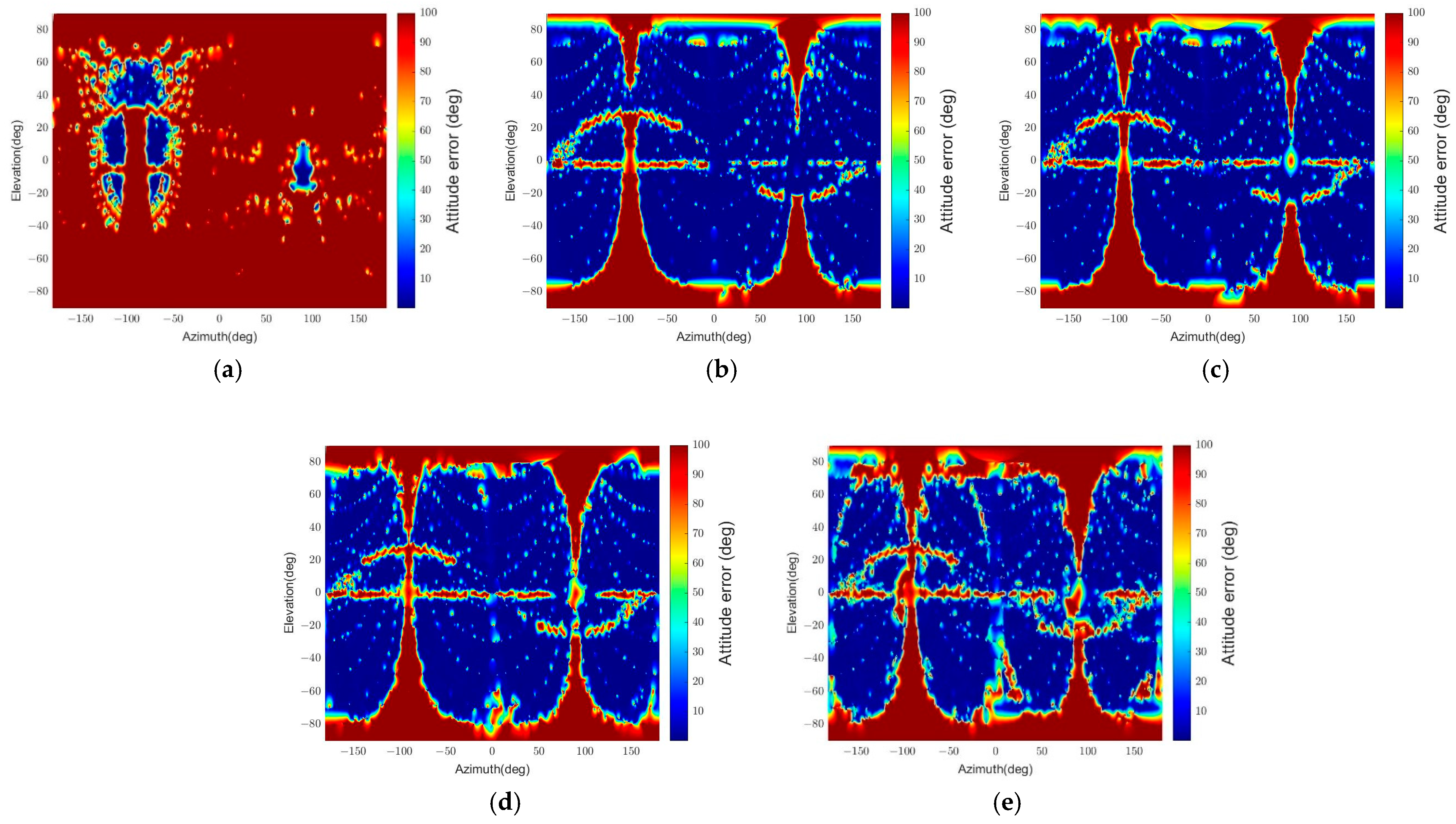
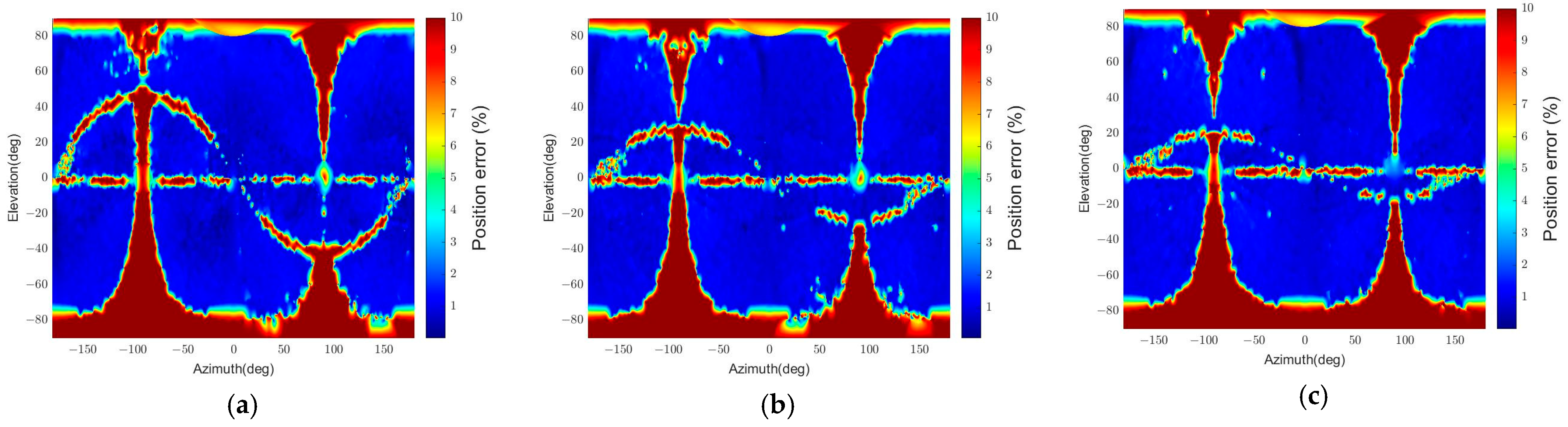
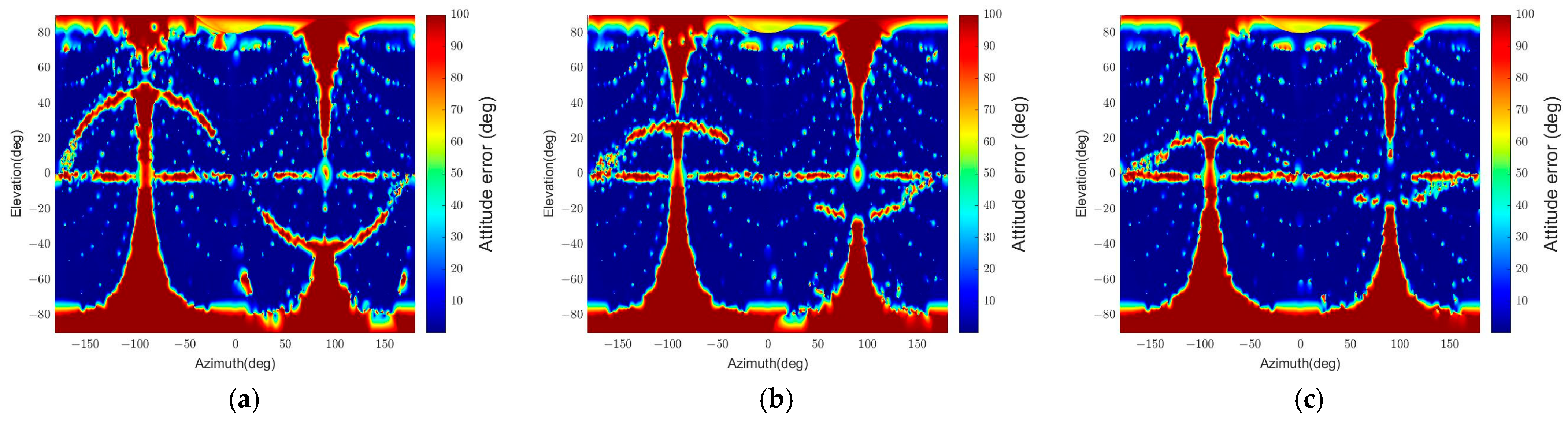
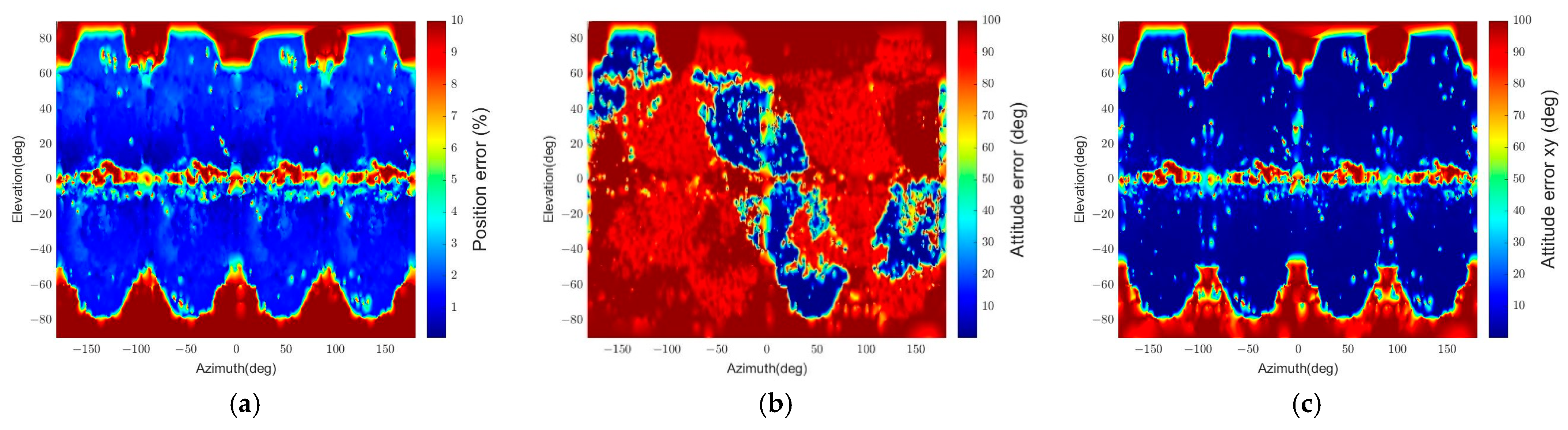
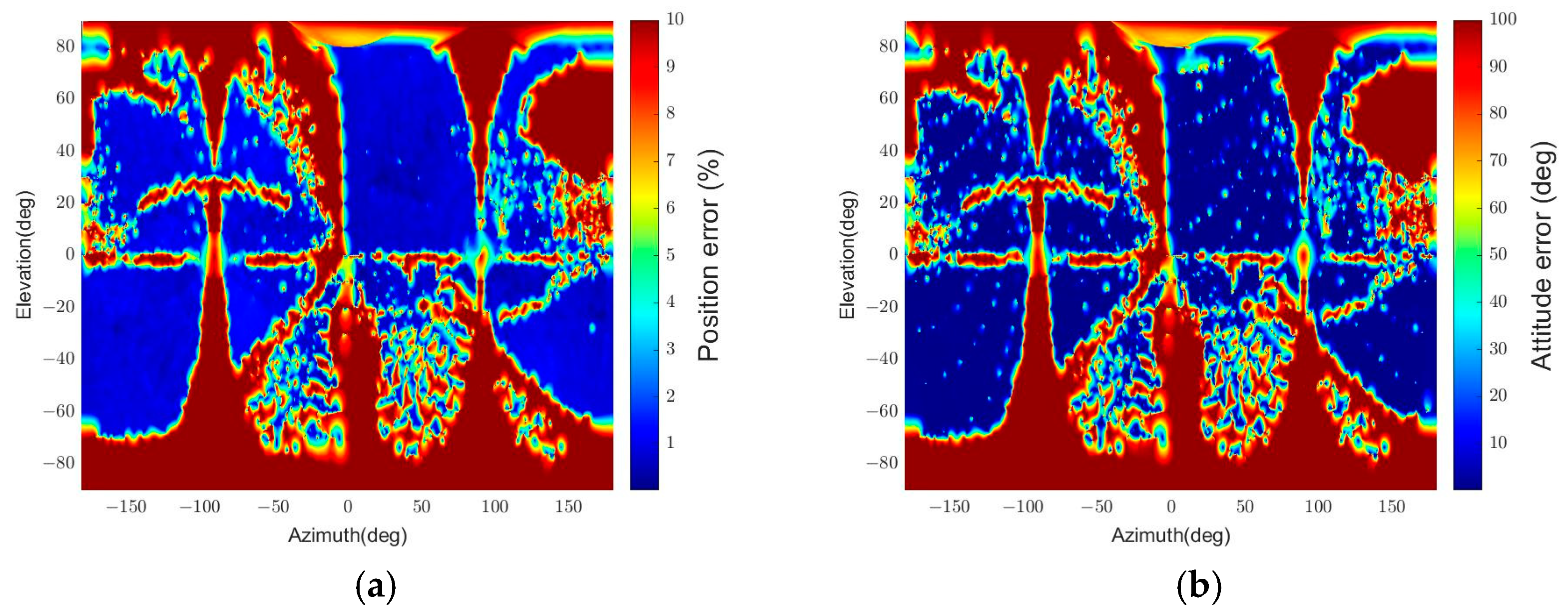
- The pose determination performance of the algorithm is assessed with various ranges of relative pose and is described by a unique graphical expression of pose error. The pose estimation error is computed for attitudes expressed in azimuth from −180° to 180° and elevation from −90° to 90° while maintaining the relative distance. This process is repeated for five different relative distances.
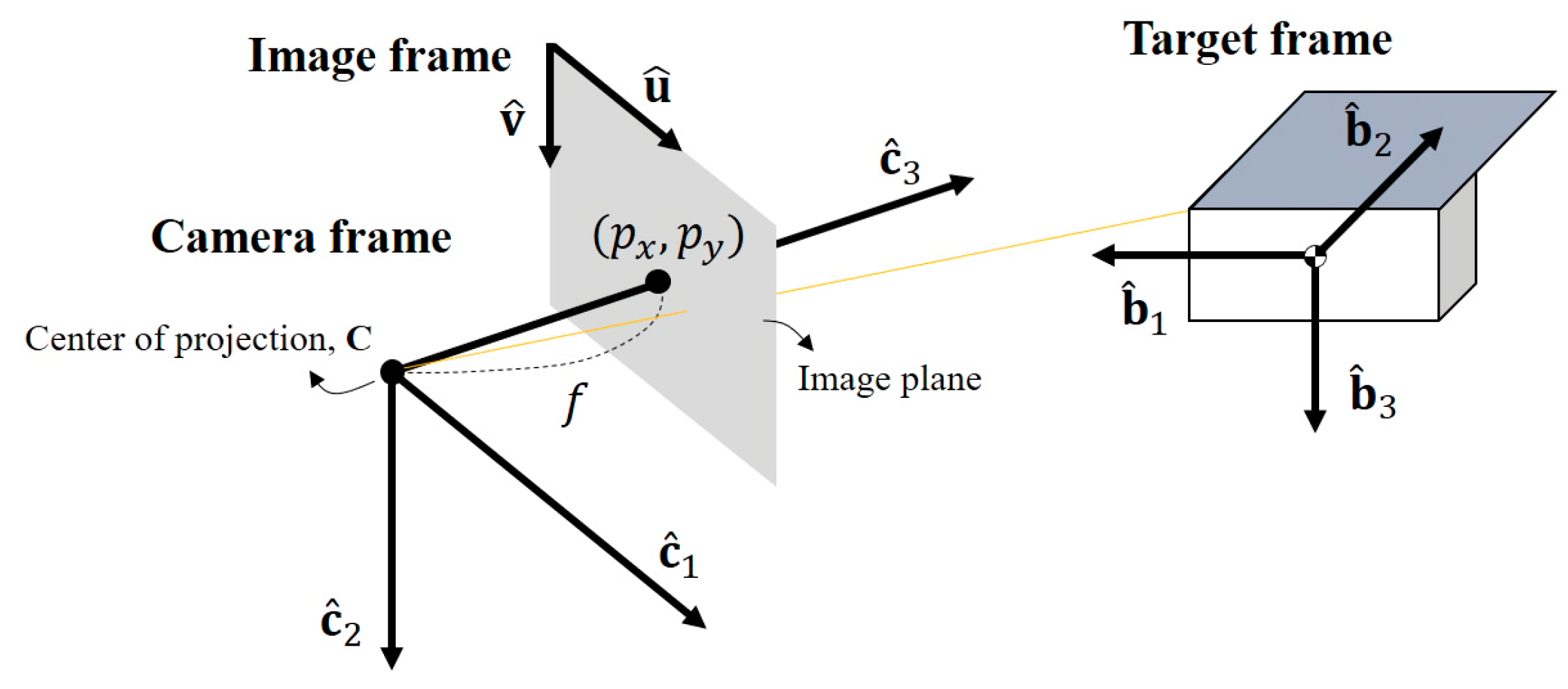
2. Problem Statement
3. Concept and Model Description
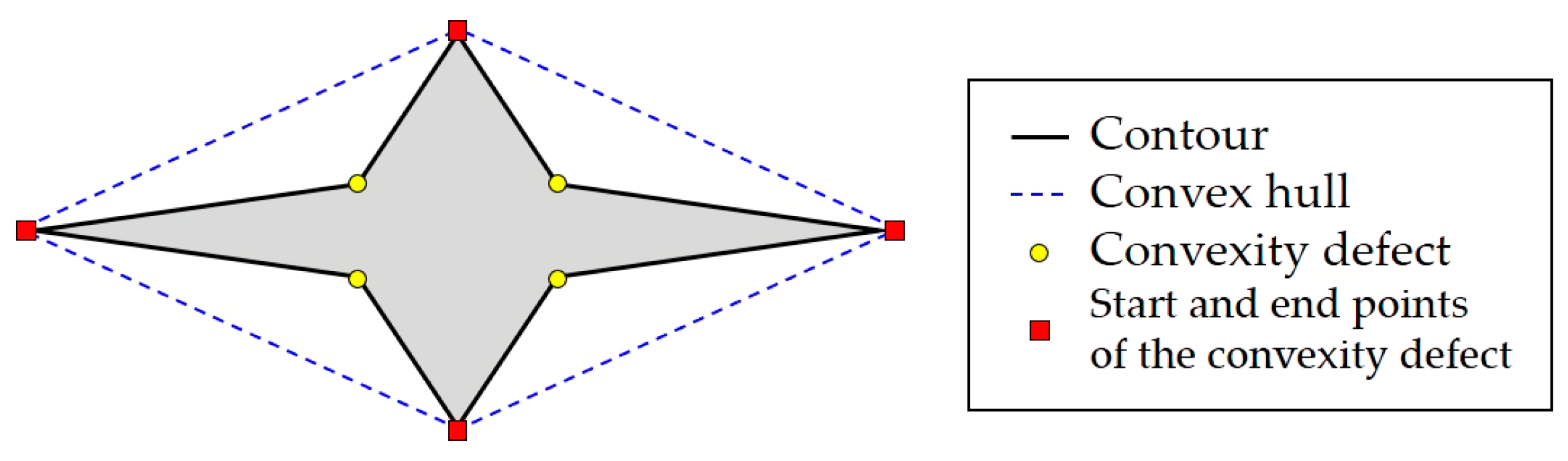
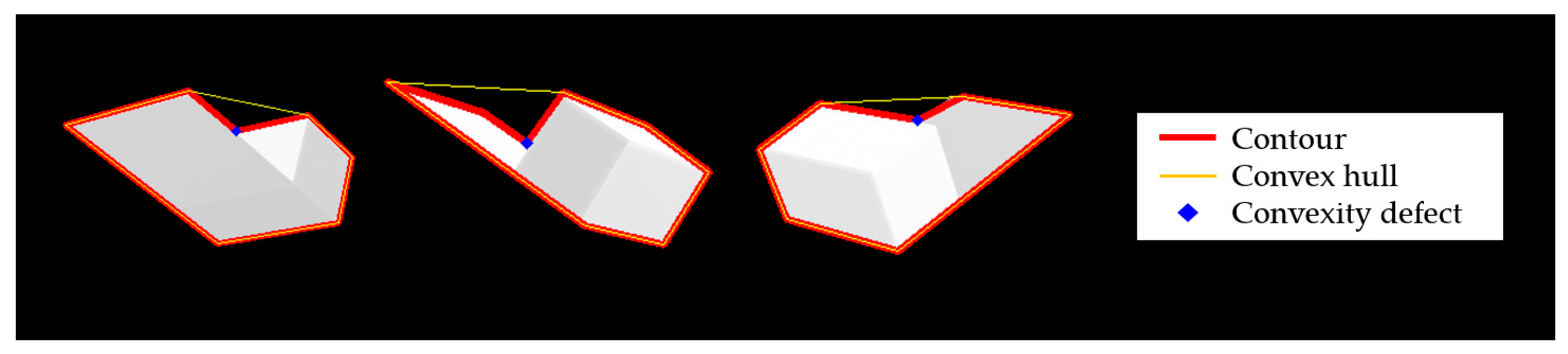
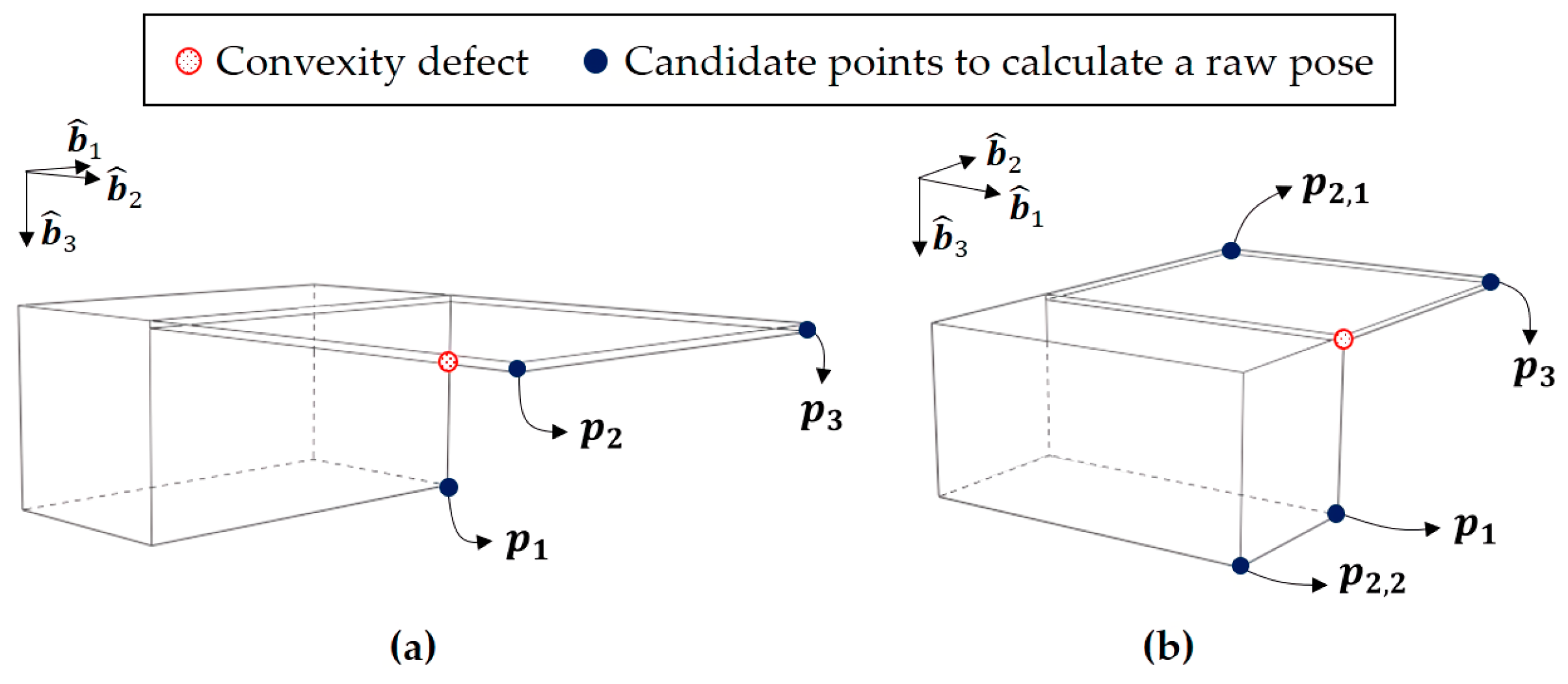
3.1. Contour, Convex Hull, and Convexity Defect
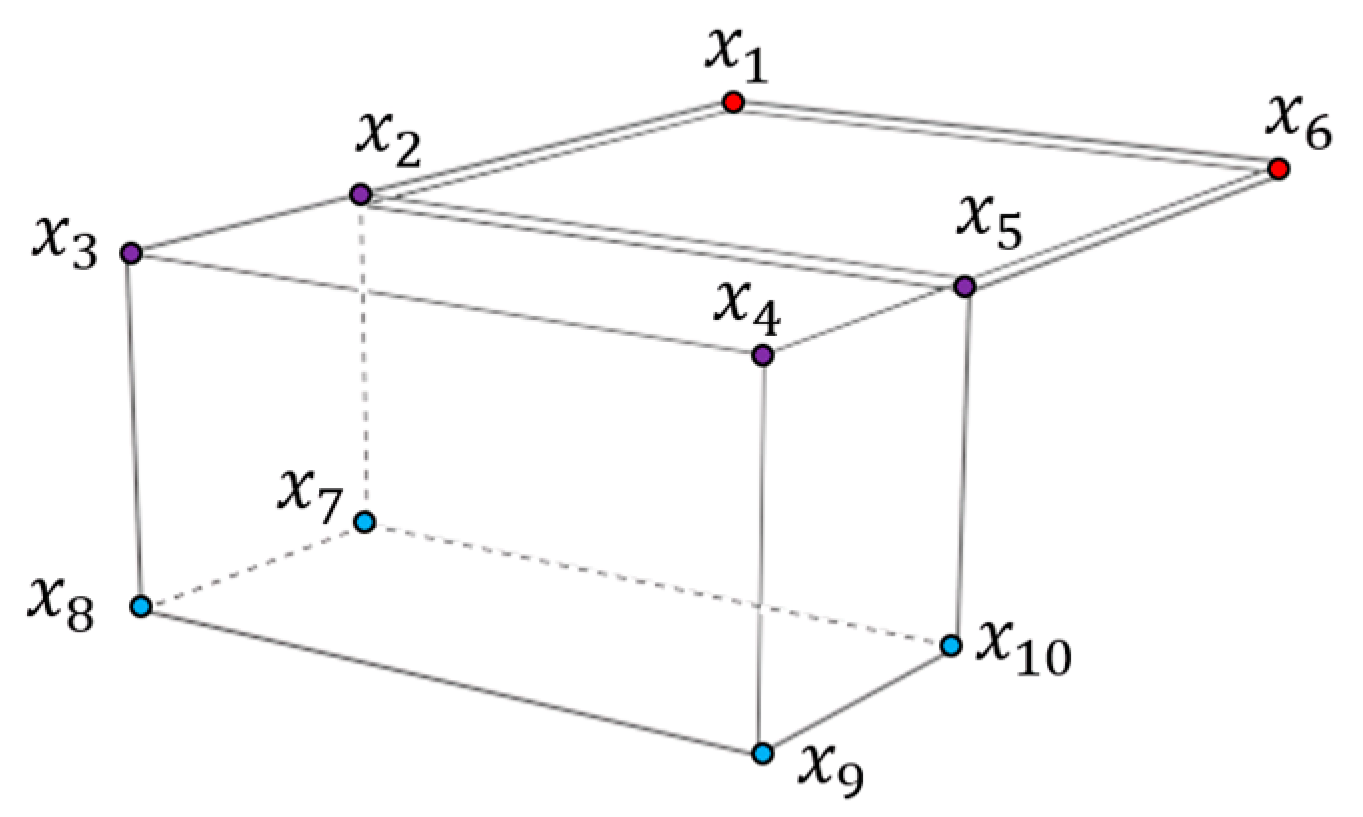
3.2. Model Description
3.3. Fundamental Assumptions
- 1.
- If the convex hull and the contour do not coincide, at least one convexity defect exists.
- 2.
- The convex hull and the contour become identical if there exist additional lines connecting the points 𝑝 and 𝑏, where and
- 3.
- Given the simplified model of the spacecraft, the second assumption is further simplified as and .
- 4.
- The points and determine the start and end points of the convexity defect.
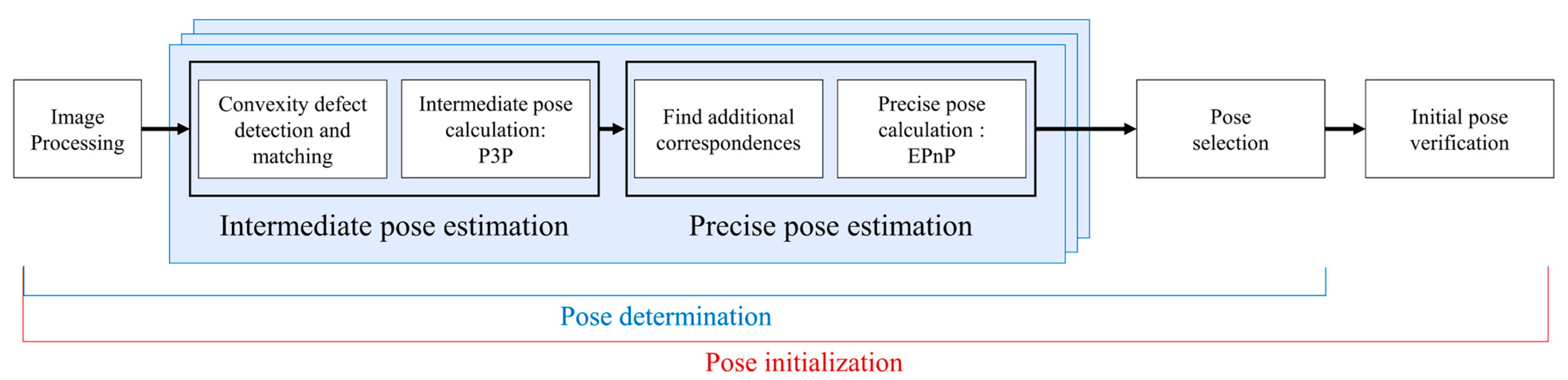
4. Pose Initialization Framework
4.1. Overview of Pose Initialization
| Algorithm 1: Pose initialization algorithm | ||
| Input: Image sub-algorithm Image processing (Algorithm 2) if the contour is detected and nonconvex then | ||
| sub-algorithm Intermediate pose estimation (Algorithm 3) sub-algorithm Precise pose estimation (Algorithm 4) sub-algorithm Pose selection (Algorithm 5) sub-algorithm Initial pose verification (Algorithm 6) | ||
| else | ||
| Go back to the beginning and read another image | ||
| end | ||
| Algorithm 2: Sub-algorithm for the image processing step | ||
| Blur the Image Binarize the blurred image Extract the contour from the binary image Compute the bounding box from the binary image if the contour is detected then | ||
| Get the simplified contour from the detected contour Extract vertices from the simplified contour | ||
| else | ||
| Go back to the beginning and read another image | ||
| end | ||
| Algorithm 3: Sub-algorithm for the intermediate pose estimation step | |||
| Extract a convexity defect and the start and end points of the convexity defect Check that the contour corresponds to case 1 or case 2 comb_2d = a set of 2D point combinations comb_3d = a set of 3D point combinations for num_2d = 1 to the number of triads in comb_2d | |||
| for num_3d = 1 to the number of triads in comb_3d | |||
| corr_set = correspondence between comb_2d[num_2d] and comb_3d[num_3d] Compute intermediate poses using the P3P algorithm Add the intermediate poses to the intermediate pose set, int_pose | |||
| end | |||
| end | |||
| Algorithm 4: Sub-algorithm for the precise pose estimation step | ||||||
| for num_pos = 1 to the number of poses in int_pose | ||||||
| Project the 3D points to an image plane using int_pose[num_pos] for i = 1 to the number of total 3D points | ||||||
| for j = 1 to the number of extracted feature points | ||||||
| Compute if then | ||||||
| Add the ith 3D point and the jth 2D point to corr_set | ||||||
| end | ||||||
| end | ||||||
| end | ||||||
| if the number of correspondences in corr_set > 3 then | ||||||
| Compute a precise pose using the EPnP algorithm Add the precise pose to the precise pose set, prec_pose | ||||||
| end | ||||||
| end | ||||||
| Algorithm 5: Sub-algorithm for the pose selection step | ||||
| for l = 1 to the number of elements in prec_pose | ||||
| Project the 3D points to an image plane using prec_pose[l] Find the bounding box of the reprojected 3D points Compute IOU if IOU > 0.8 then | ||||
| Compute if then | ||||
| pose_solution = prec_pose[l] | ||||
| end | ||||
| end | ||||
| end | ||||
| Algorithm 6: Sub-algorithm for the initial pose verification step | ||
| if then | ||
| initial_pose = pose_solution return initial_pose (end of pose initialization) | ||
| else | ||
| Go back to the beginning and read another image | ||
| end | ||
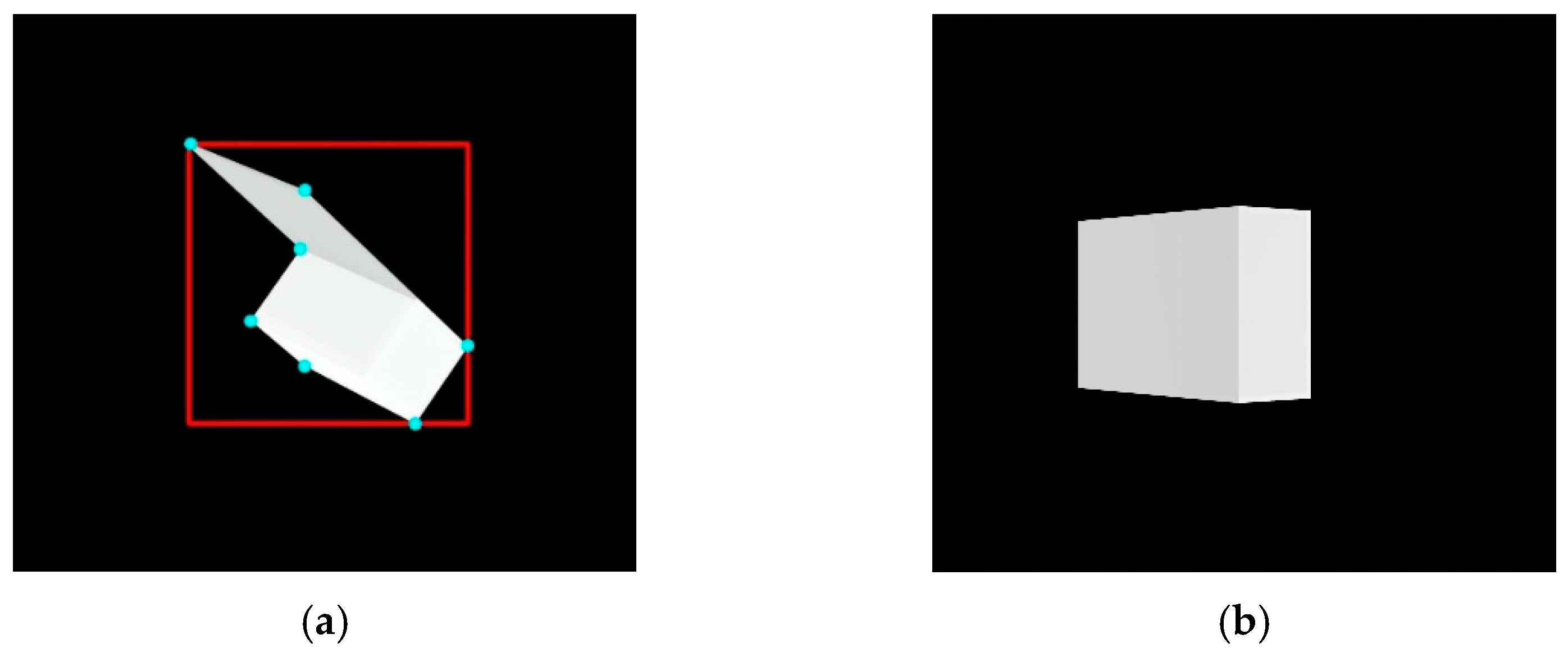
4.2. Image Processing
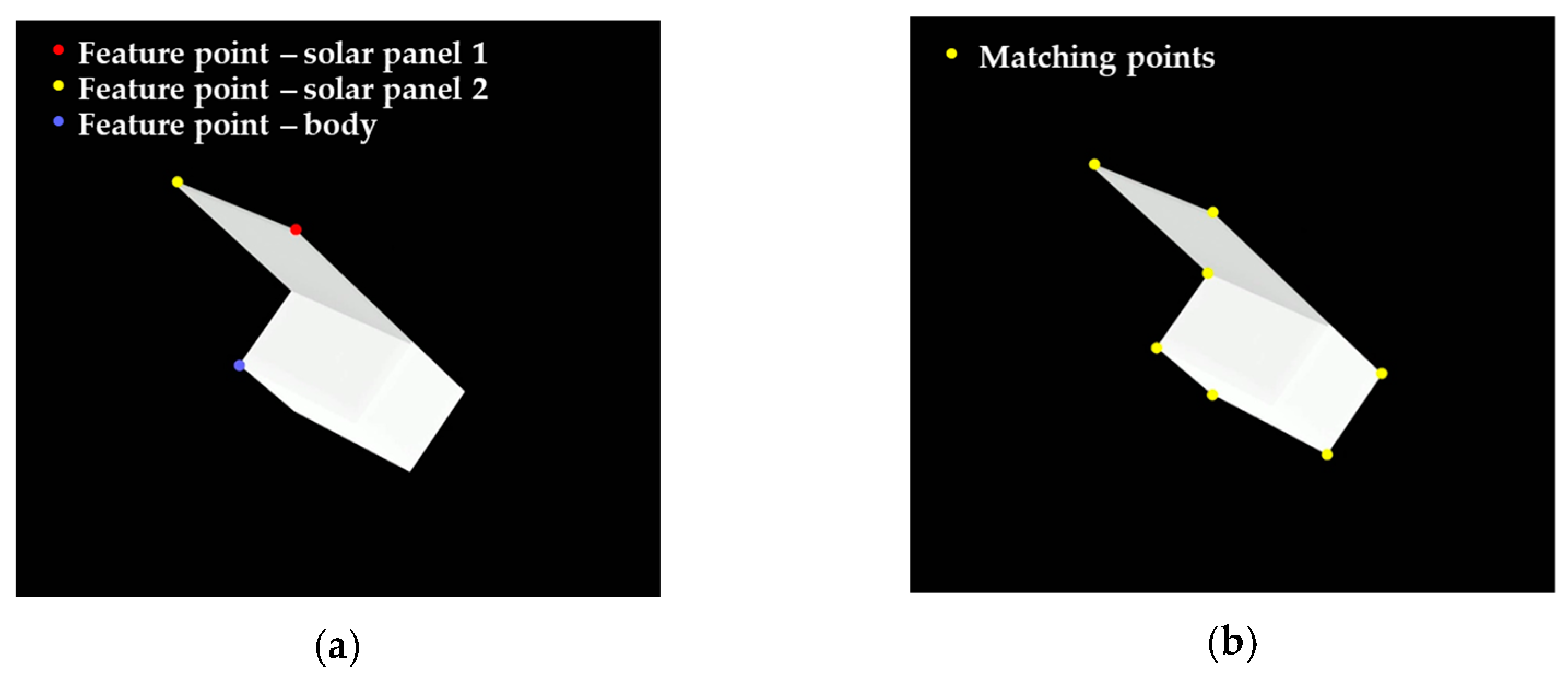
4.3. Intermediate Pose Estimation
4.4. Precise Pose Estimation
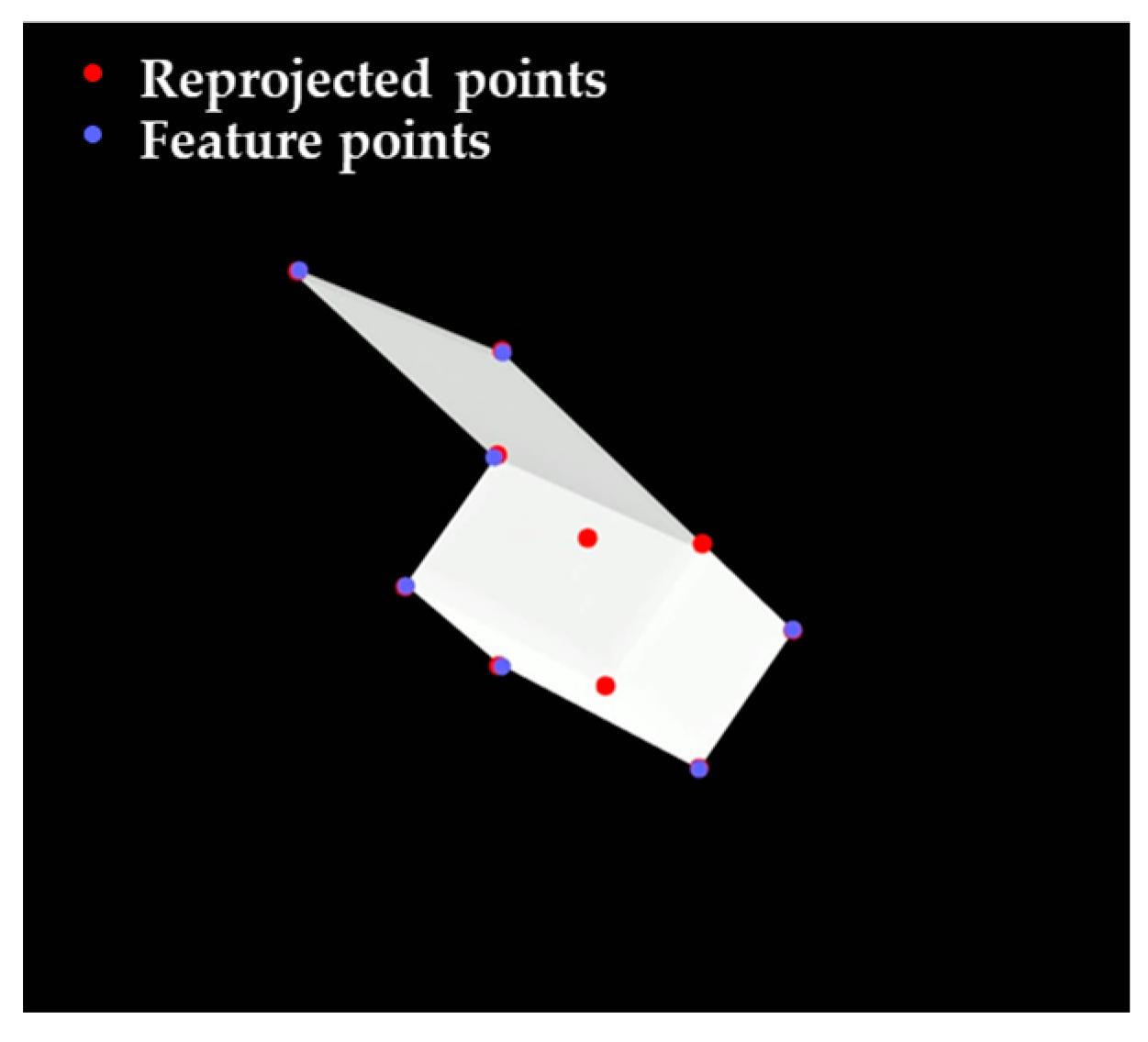
4.5. Pose Selection
4.6. Initial Pose Verification
5. Simulations
5.1. Simulation Environments and Performance Measures
5.2. Algorithm Effectiveness Assessment
5.2.1. Effectiveness Assessment of Model Matching
5.2.2. Effectiveness Assessment of Algorithm’s Structure
5.3. Simulation Scenarios for Performance Analysis
5.3.1. Pose Estimation Performance Depending on Relative Poses
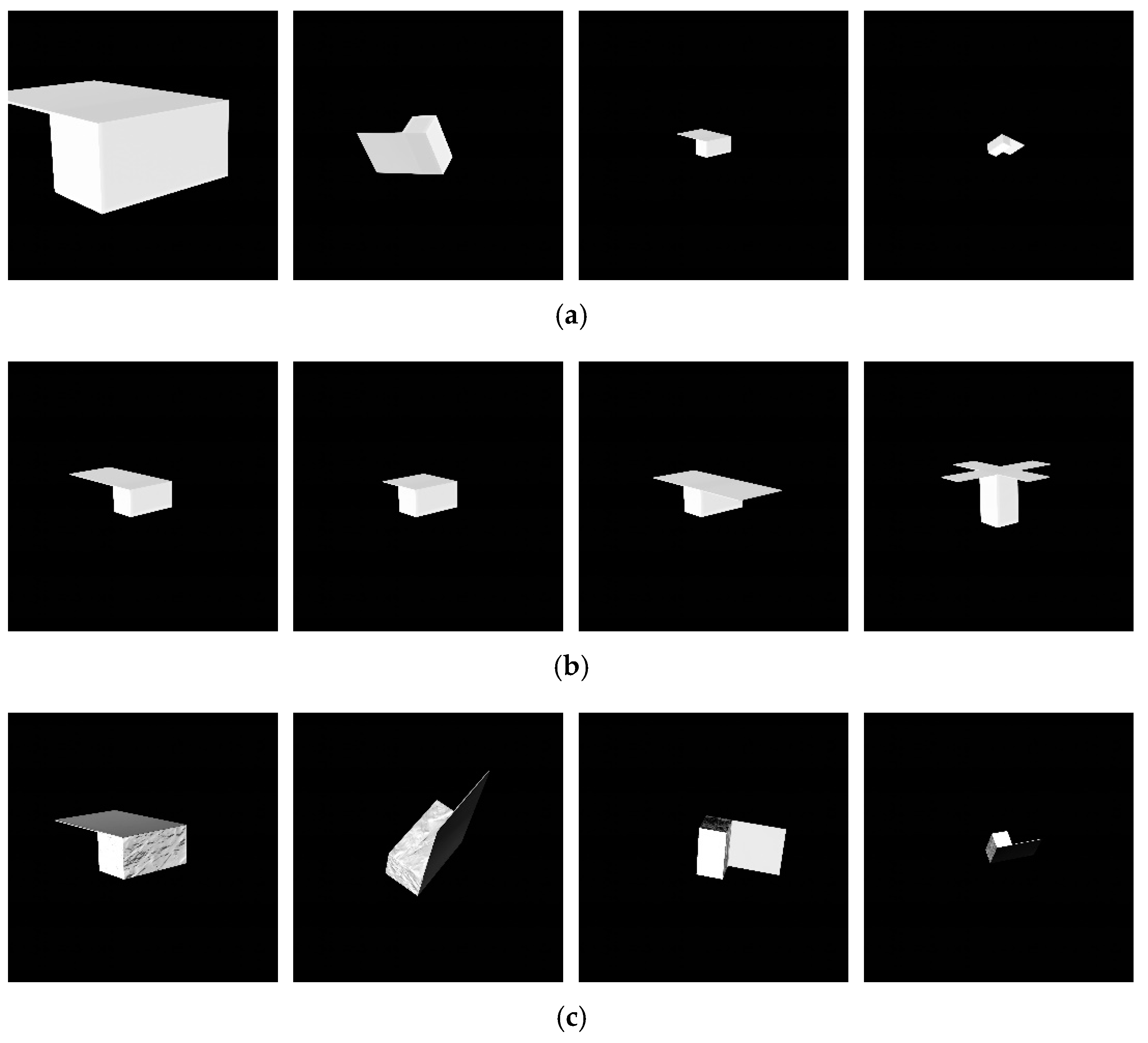
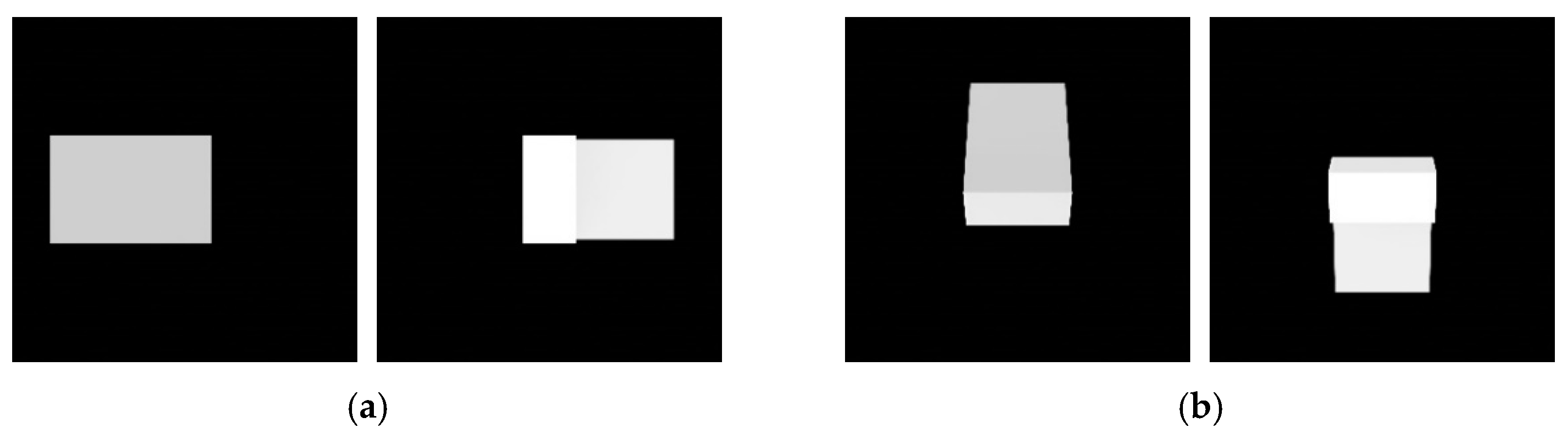
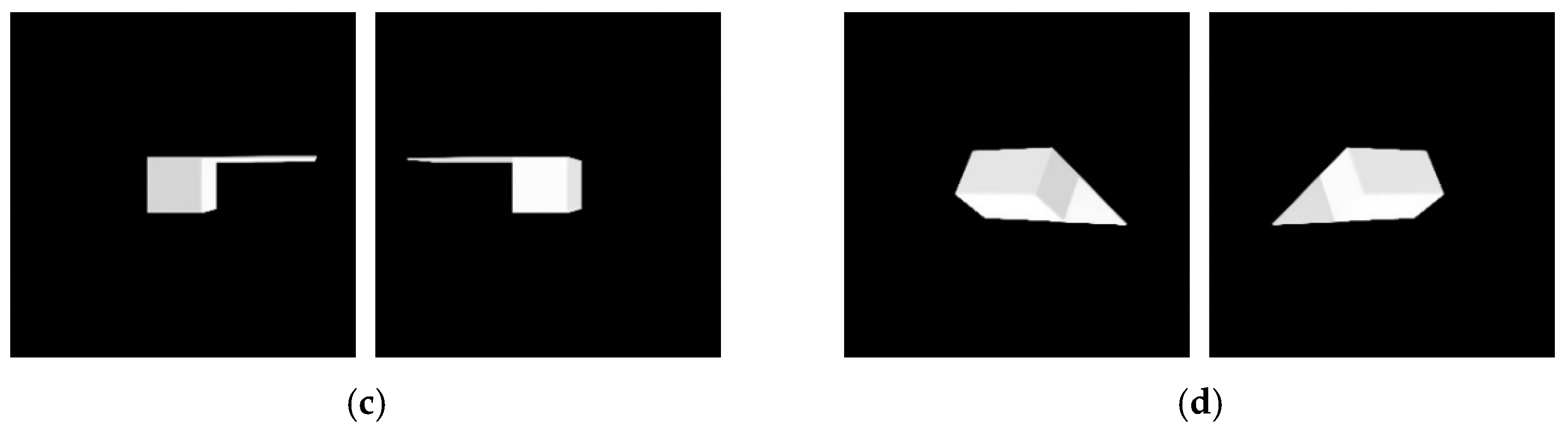
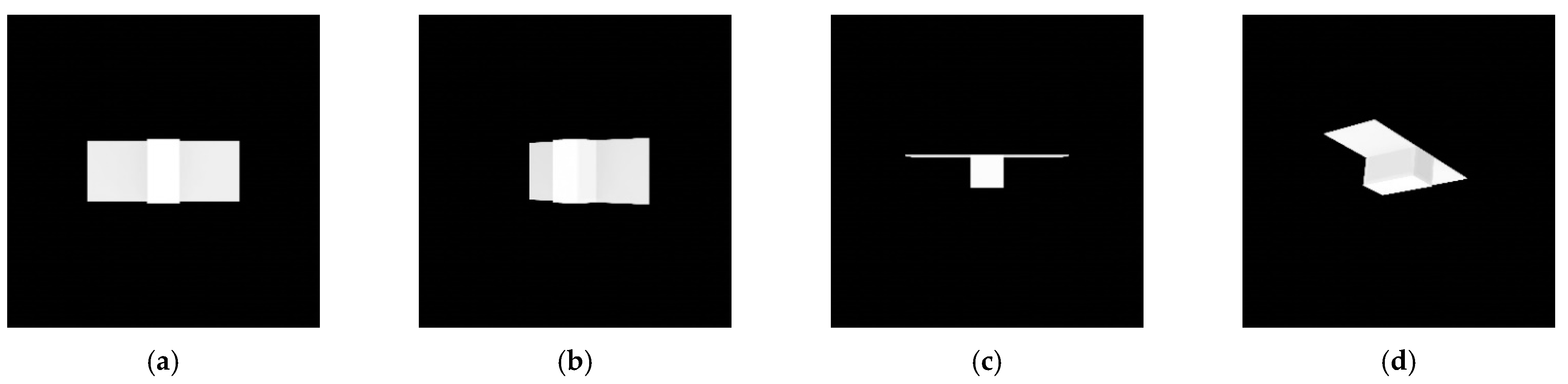
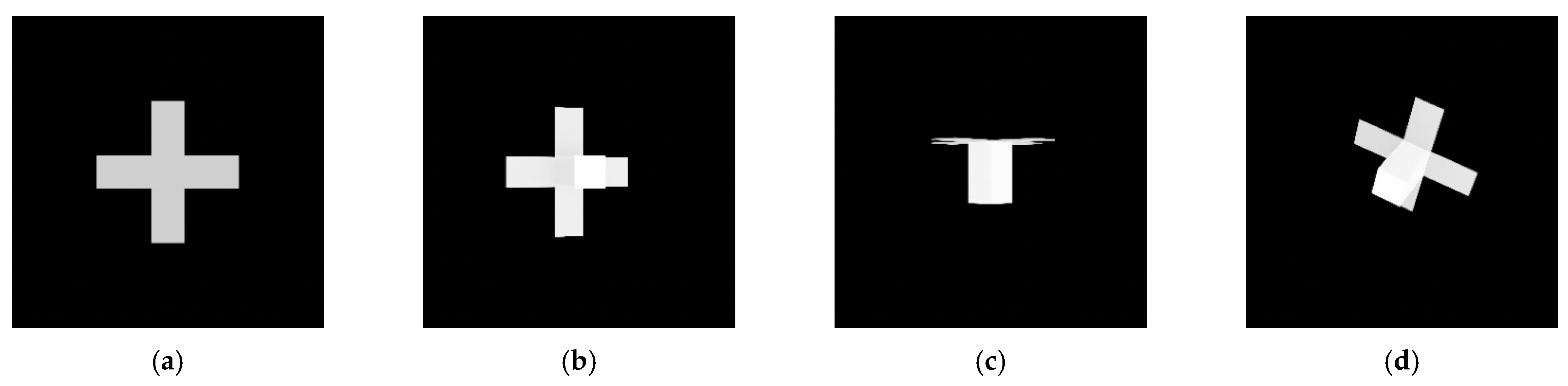
5.3.2. Pose Estimation Performance Depending on the Shape of a Spacecraft
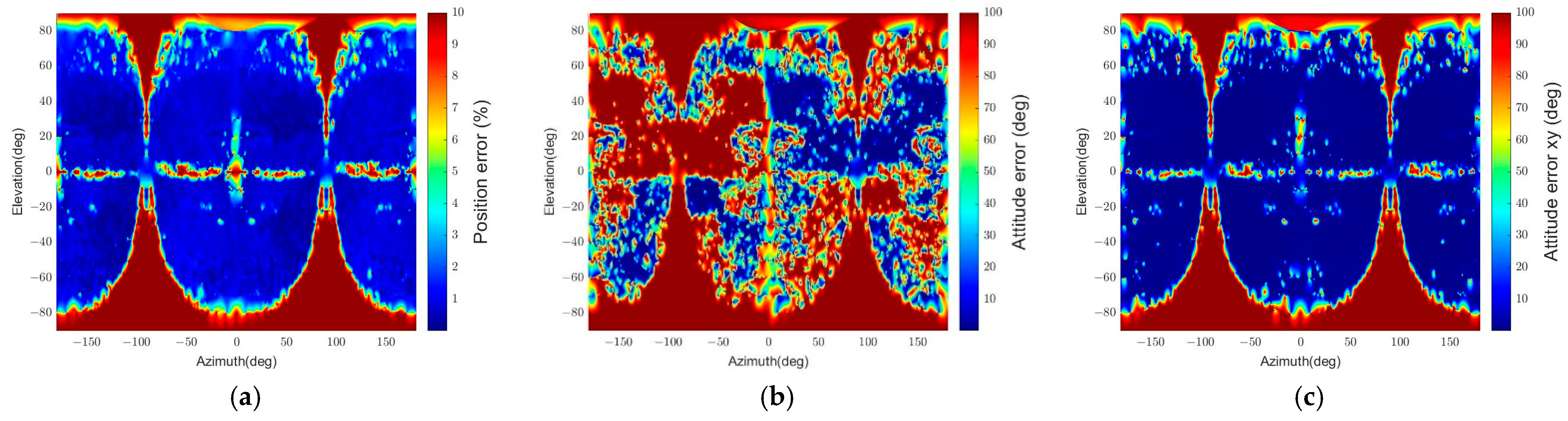
5.3.3. Pose Estimation Performance with Textured-Surface Spacecraft
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Cassinis, L.P.; Fonod, R.; Gill, E. Review of the robustness and applicability of monocular pose estimation systems for relative navigation with an uncooperative spacecraft. Prog. Aerosp. Sci. 2019, 110, 100548. [Google Scholar] [CrossRef]
- Philip, N.; Ananthasayanam, M.; Dasgupta, S. Study of Relative Position and Attitude Estimation and Control Scheme for the Final Phase of an Autonomous Docking Mission. IFAC Proc. Vol. 1998, 31, 185–193. [Google Scholar] [CrossRef]
- Calhoun, P.C.; Dabney, R. Solution to the problem of determining the relative 6 DOF state for spacecraft automated rendezvous and docking. In Proceedings of the Space Guidance, Control, and Tracking II, Orlando, FL, USA, 17–18 April 1995; pp. 175–184. [Google Scholar]
- Opromolla, R.; Fasano, G.; Rufino, G.; Grassi, M. A review of cooperative and uncooperative spacecraft pose determination techniques for close-proximity operations. Prog. Aerosp. Sci. 2017, 93, 53–72. [Google Scholar] [CrossRef]
- Kroes, R.; Montenbruck, O.; Bertiger, W.; Visser, P. Precise GRACE baseline determination using GPS. Gps Solut. 2005, 9, 21–31. [Google Scholar] [CrossRef]
- Gill, E.; D’Amico, S.; Montenbruck, O. Autonomous formation flying for the PRISMA mission. J. Spacecr. Rocket. 2007, 44, 671–681. [Google Scholar] [CrossRef] [Green Version]
- Kahr, E.; Roth, N.; Montenbruck, O.; Risi, B.; Zee, R.E. GPS relative navigation for the CanX-4 and CanX-5 formation-flying nanosatellites. J. Spacecr. Rocket. 2018, 55, 1545–1558. [Google Scholar] [CrossRef]
- Montenbruck, O.; Wermuth, M.; Kahle, R. GPS based relative navigation for the TanDEM-X mission-first flight results. Navigation 2011, 58, 293–304. [Google Scholar] [CrossRef]
- Sarker, S.; Al-Tabatabai, K.F.; Pal, A.; Dhasarathan, V.; Arefin, M.A.; Islam, M.K. D-shape photonic crystal fiber for optical coherence tomography: Design and analysis. Opt. Eng. 2021, 60, 127109. [Google Scholar] [CrossRef]
- Sarker, S.; Arefin, M.A.; Islam, M.K. Design and FEM Analysis of a Novel Steering Shaped Photonic Crystal Fiber. In Proceedings of the 2021 5th International Conference on Electrical Information and Communication Technology (EICT), Khulna Bangladesh, 17–19 December 2021; pp. 1–4. [Google Scholar]
- Sarker, S.; Arefin, M.A.; Akram, M.R.; Islam, M.K. High Nonlinearity and Ultra High Birefringence Silicon Core Photonic Crystal Fiber. In Proceedings of the 2021 IEEE International Conference on Telecommunications and Photonics (ICTP), Dhaka, Bangladesh, 22–24 December 2021; pp. 1–5. [Google Scholar]
- Di Mauro, G.; Lawn, M.; Bevilacqua, R. Survey on guidance navigation and control requirements for spacecraft formation-flying missions. J. Guid. Control. Dyn. 2018, 41, 581–602. [Google Scholar] [CrossRef]
- Ho, C.-C.J.; McClamroch, N.H. Automatic spacecraft docking using computer vision-based guidance and control techniques. J. Guid. Control. Dyn. 1993, 16, 281–288. [Google Scholar] [CrossRef]
- Junkins, J.L.; Hughes, D.C.; Wazni, K.P.; Pariyapong, V. Vision-based navigation for rendezvous, docking and proximity operations. In Proceedings of the 22nd Annual AAS Guidance and Control Conference, Breckenridge, CO, USA, 3−7 February 1999; p. 021. [Google Scholar]
- Sellmaier, F.; Boge, T.; Spurmann, J.; Gully, S.; Rupp, T.; Huber, F. On-orbit servicing missions: Challenges and solutions for spacecraft operations. In Proceedings of the SpaceOps 2010 Conference Delivering on the Dream Hosted by NASA Marshall Space Flight Center and Organized by AIAA, Huntsville, Alabama, 25–30 April 2010; p. 2159. [Google Scholar]
- Davis, J.P.; Mayberry, J.P.; Penn, J.P. On-orbit servicing: Inspection repair refuel upgrade and assembly of satellites in space. Aerosp. Corp. Rep. 2019. Available online: https://aerospace.org/sites/default/files/2019-05/Davis-Mayberry-Penn_OOS_04242019.pdf (accessed on 20 September 2022).
- Nishida, S.-I.; Kawamoto, S.; Okawa, Y.; Terui, F.; Kitamura, S. Space debris removal system using a small satellite. Acta Astronaut. 2009, 65, 95–102. [Google Scholar] [CrossRef]
- D’Amico, S.; Benn, M.; Jørgensen, J.L. Pose estimation of an uncooperative spacecraft from actual space imagery. Int. J. Space Sci. Eng. 5 2014, 2, 171–189. [Google Scholar]
- Segal, S.; Carmi, A.; Gurfil, P. Stereovision-based estimation of relative dynamics between noncooperative satellites: Theory and experiments. IEEE Trans. Control. Syst. Technol. 2013, 22, 568–584. [Google Scholar] [CrossRef]
- Pesce, V.; Opromolla, R.; Sarno, S.; Lavagna, M.; Grassi, M. Autonomous relative navigation around uncooperative spacecraft based on a single camera. Aerosp. Sci. Technol. 2019, 84, 1070–1080. [Google Scholar] [CrossRef]
- Kelsey, J.M.; Byrne, J.; Cosgrove, M.; Seereeram, S.; Mehra, R.K. Vision-based relative pose estimation for autonomous rendezvous and docking. In Proceedings of the 2006 IEEE Aerospace Conference, Big Sky, MT, USA, 4–11 March 2006; p. 20. [Google Scholar]
- Sharma, S.; Ventura, J.; D’Amico, S. Robust model-based monocular pose initialization for noncooperative spacecraft rendezvous. J. Spacecr. Rocket. 2018, 55, 1414–1429. [Google Scholar] [CrossRef] [Green Version]
- Chen, Z.; Li, L.; Wu, Y.; Hua, B.; Niu, K. A new pose estimation method for non-cooperative spacecraft based on point cloud. Int. J. Intell. Comput. Cybern. 2018, 12, 23–41. [Google Scholar] [CrossRef]
- Capuano, V.; Kim, K.; Harvard, A.; Chung, S.-J. Monocular-based pose determination of uncooperative space objects. Acta Astronaut. 2020, 166, 493–506. [Google Scholar] [CrossRef]
- Capuano, V.; Alimo, S.R.; Ho, A.Q.; Chung, S.-J. Robust features extraction for on-board monocular-based spacecraft pose acquisition. In Proceedings of the AIAA Scitech 2019 Forum, San Diego, CA, USA, 7–11 January 2019; p. 2005. [Google Scholar]
- Shi, J.; Ulrich, S.; Ruel, S. Spacecraft pose estimation using a monocular camera. In Proceedings of the 67th International Astronautical Congress, Guadalajara, Mexico, 26–30 September 2016. [Google Scholar]
- Rondao, D.; Aouf, N. Multi-view monocular pose estimation for spacecraft relative navigation. In Proceedings of the 2018 AIAA Guidance, Navigation, and Control Conference, Kissimmee, FL, USA, 8–12 January 2018; p. 2100. [Google Scholar]
- Hough, P.V. Method and Means for Recognizing Complex Patterns. U.S. Patent 3069654A, 18 December 1962. [Google Scholar]
- Alimohammadi, S.; He, D. Multi-stage algorithm for uncertainty analysis of solar power forecasting. In Proceedings of the 2016 IEEE Power and Energy Society General Meeting (PESGM), Boston, MA, USA, 17–21 July 2016; pp. 1–5. [Google Scholar]
- Von Gioi, R.G.; Jakubowicz, J.; Morel, J.-M.; Randall, G. LSD: A fast line segment detector with a false detection control. IEEE Trans. Pattern Anal. Mach. Intell. 2008, 32, 722–732. [Google Scholar] [CrossRef]
- Shi, J. Good features to track. In Proceedings of the 1994 IEEE Conference on Computer Vision and Pattern Recognition, Seattle, WA, USA, 21–23 June 1994; pp. 593–600. [Google Scholar]
- Fischler, M.A.; Bolles, R.C. Random sample consensus: A paradigm for model fitting with applications to image analysis and automated cartography. Commun. ACM 1981, 24, 381–395. [Google Scholar] [CrossRef]
- Abdi, H.; Williams, L.J. Principal component analysis. Wiley Interdiscip. Rev. Comput. Stat. 2010, 2, 433–459. [Google Scholar] [CrossRef]
- Harvard, A.; Capuano, V.; Shao, E.Y.; Chung, S.-J. Spacecraft pose estimation from monocular images using neural network based keypoints and visibility maps. In Proceedings of the AIAA Scitech 2020 Forum, Orlando, FL, USA, 6–10 January 2020; p. 1874. [Google Scholar]
- Pasqualetto Cassinis, L.; Fonod, R.; Gill, E.; Ahrns, I.; Gil Fernandez, J. CNN-based pose estimation system for close-proximity operations around uncooperative spacecraft. In Proceedings of the AIAA Scitech 2020 Forum, Orlando, FL, USA, 6–10 January 2020; p. 1457. [Google Scholar]
- Cassinis, L.P.; Fonod, R.; Gill, E.; Ahrns, I.; Gil-Fernández, J. Evaluation of tightly-and loosely-coupled approaches in CNN-based pose estimation systems for uncooperative spacecraft. Acta Astronaut. 2021, 182, 189–202. [Google Scholar] [CrossRef]
- Szeliski, R. Feature-based alignment. In Computer Vision; Springer: London, UK, 2011; pp. 273–301. [Google Scholar]
- Gao, X.-S.; Hou, X.-R.; Tang, J.; Cheng, H.-F. Complete solution classification for the perspective-three-point problem. IEEE Trans. Pattern Anal. Mach. Intell. 2003, 25, 930–943. [Google Scholar]
- Bujnak, M.; Kukelova, Z.; Pajdla, T. A general solution to the P4P problem for camera with unknown focal length. In Proceedings of the 2008 IEEE Conference on Computer Vision and Pattern Recognition, Anchorage, AK, USA, 23–28 June 2008; pp. 1–8. [Google Scholar]
- Lepetit, V.; Moreno-Noguer, F.; Fua, P. Epnp: An accurate o (n) solution to the pnp problem. Int. J. Comput. Vis. 2009, 81, 155–166. [Google Scholar] [CrossRef] [Green Version]
- Pesce, V.; Haydar, M.F.; Lavagna, M.; Lovera, M. Comparison of filtering techniques for relative attitude estimation of uncooperative space objects. Aerosp. Sci. Technol. 2019, 84, 318–328. [Google Scholar] [CrossRef]
- David, P.; Dementhon, D.; Duraiswami, R.; Samet, H. SoftPOSIT: Simultaneous pose and correspondence determination. Int. J. Comput. Vis. 2004, 59, 259–284. [Google Scholar] [CrossRef] [Green Version]
- Sharma, S.; Beierle, C.; D’Amico, S. Pose estimation for non-cooperative spacecraft rendezvous using convolutional neural networks. In Proceedings of the 2018 IEEE Aerospace Conference, Big Sky, MT, USA, 3–10 March 2018; pp. 1–12. [Google Scholar]
- Kalchbrenner, N.; Grefenstette, E.; Blunsom, P. A convolutional neural network for modelling sentences. arXiv 2014, preprint. arXiv:1404.2188. [Google Scholar]
- Cassinis, L.P.; Menicucci, A.; Gill, E.; Ahrns, I.; Sanchez-Gestido, M. On-ground validation of a CNN-based monocular pose estimation system for uncooperative spacecraft: Bridging domain shift in rendezvous scenarios. Acta Astronaut. 2022, 196, 123–138. [Google Scholar] [CrossRef]
- Park, T.H.; D’Amico, S. Robust Multi-Task Learning and Online Refinement for Spacecraft Pose Estimation across Domain Gap. arXiv 2022, preprint. arXiv:2203.04275. [Google Scholar]
- Park, T.H.; Märtens, M.; Lecuyer, G.; Izzo, D.; D’Amico, S. SPEED+: Next Generation Dataset for Spacecraft Pose Estimation across Domain Gap. arXiv 2021, preprint. arXiv:2110.03101. [Google Scholar]
- Suzuki, S. Topological structural analysis of digitized binary images by border following. Comput. Vis. Graph. Image Processing 1985, 30, 32–46. [Google Scholar] [CrossRef]
- Saalfeld, A. Topologically consistent line simplification with the Douglas-Peucker algorithm. Cartogr. Geogr. Inf. Sci. 1999, 26, 7–18. [Google Scholar] [CrossRef]
- Fiorenza, C.E.; Barik, S.K.; Prajapati, A.; Mahesh, S. Hand Gesture Recognition using Convexity Defects. Int. J. Innov. Technol. Explor. Eng. (IJITEE) 2019, 9, 1161–1165. [Google Scholar] [CrossRef]
- Boyd, S.; Boyd, S.P.; Vandenberghe, L. Convex Optimization; Cambridge University Press: Cambridge, UK, 2004. [Google Scholar]
- Contours: More functions. Available online: https://docs.opencv.org/3.4/d8/d1c/tutorial_js_contours_more_functions.html (accessed on 21 August 2022).
- Graham, R.L. An efficient algorithm for determining the convex hull of a finite planar set. Info. Pro. Lett. 1972, 1, 132–133. [Google Scholar] [CrossRef]
- Jarvis, R.A. On the identification of the convex hull of a finite set of points in the plane. Inf. Processing Lett. 1973, 2, 18–21. [Google Scholar] [CrossRef]
- Bradski, G. The OpenCV Library. Dr. Dobb’s J. Softw. Tools 2000, 25, 120–123. [Google Scholar]
- Rezatofighi, H.; Tsoi, N.; Gwak, J.; Sadeghian, A.; Reid, I.; Savarese, S. Generalized intersection over union: A metric and a loss for bounding box regression. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Long Beach, CA, USA, 15–20 June 2019; pp. 658–666. [Google Scholar]
- Community, B.O. Blender—A 3D Modelling and Rendering Package; Stichting Blender Foundation: Amsterdam, The Netherlands, 2018. [Google Scholar]
- Capuano, G.; Severi, M.; Cacace, F.; Lirato, R.; Longobardi, P.; Pollio, G.; DeNino, M.; Ippolito, M. Video system for prisma formation flying mission. In Proceedings of the IAA Symposium on Small Satellite Systems and Services (4S), Rhodes, Greece, 26–30 May 2008; pp. 26–30. [Google Scholar]
- Woffinden, D.C.; Geller, D.K. Relative angles-only navigation and pose estimation for autonomous orbital rendezvous. J. Guid. Control. Dyn. 2007, 30, 1455–1469. [Google Scholar] [CrossRef]
- Sharma, S. Comparative assessment of techniques for initial pose estimation using monocular vision. Acta Astronaut. 2016, 123, 435–445. [Google Scholar] [CrossRef]
- Guo, K.; Ye, H.; Gao, X.; Chen, H. An Accurate and Robust Method for Absolute Pose Estimation with UAV Using RANSAC. Sensors 2022, 22, 5925. [Google Scholar] [CrossRef]
- Li, S.; Xu, C.; Xie, M. A robust O (n) solution to the perspective-n-point problem. IEEE Trans. Pattern Anal. Mach. Intell. 2012, 34, 1444–1450. [Google Scholar] [CrossRef]
- Kumanchik, B. ICESAT2. Available online: https://nasa3d.arc.nasa.gov/detail/jpl-IceSat2 (accessed on 22 July 2022).

























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Case 1 | Case 2 | |
|---|---|---|
| 2D point combinations | ||
| 3D point combinations | ||
| Number of iterations | 8 | 2 × 12 = 24 |
| Pixel Array Size | Focal Length | Pixel Size | Field of View |
|---|---|---|---|
| 2048 | 30 mm |
| Body | Solar Panel |
|---|---|
| 1.5 m | 0.05 m |
| Algorithm | Time (s) | Pass Rate (%) | Outlier Ratio (%) | Relative Position | Relative Attitude | ||
|---|---|---|---|---|---|---|---|
| μ (%) | 1σ (%) | μ (°) | 1σ (°) | ||||
| CDA | 5449 | 80.86 | 2.37 | 0.96 | 0.22 | 0.68 | 0.38 |
| RANSAC | 303,963 | 86.06 | 3.27 | 0.94 | 0.32 | 0.78 | 0.57 |
| CDA-simple | 4696 | 80.75 | 2.45 | 0.97 | 0.42 | 0.83 | 0.48 |
| Apparent Angular Size | |||||
|---|---|---|---|---|---|
| Pass rate (%) | 6.91 | 84.36 | 80.86 | 66.86 | 46.10 |
| Outlier ratio (%) | 4.25 | 2.23 | 2.37 | 2.46 | 3.57 |
| Apparent Angular Size | ||||||
|---|---|---|---|---|---|---|
| Relative position | (%) | 0.94 | 0.89 | 0.96 | 1.12 | 1.32 |
| (%) | 0.30 | 0.19 | 0.22 | 0.27 | 0.34 | |
| Relative attitude | 0.55 | 0.62 | 0.68 | 0.85 | 1.10 | |
| 0.60 | 0.37 | 0.38 | 0.45 | 0.57 | ||
| Pass rate (%) | 79.74 | 80.86 | 79.77 |
| Outlier ratio (%) | 2.87 | 2.37 | 2.21 |
| No. Panels | |||
|---|---|---|---|
| Total execution time (s) | 5449 | 6477 | 9666 |
| Pass rate (%) | 80.86 | 73.76 | 68.89 |
| Outlier ratio (%) | 0.34 | 1.39 | 2.02 |
| Apparent Angular Size | |||
|---|---|---|---|
| Pass rate (%) | 51.41 | 56.04 | 50.63 |
| Outlier ratio (%) | 2.31 | 2.54 | 2.64 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Han, H.; Kim, H.; Bang, H. Monocular Pose Estimation of an Uncooperative Spacecraft Using Convexity Defect Features. Sensors 2022, 22, 8541. https://doi.org/10.3390/s22218541
Han H, Kim H, Bang H. Monocular Pose Estimation of an Uncooperative Spacecraft Using Convexity Defect Features. Sensors. 2022; 22(21):8541. https://doi.org/10.3390/s22218541
Chicago/Turabian StyleHan, Haeyoon, Hanik Kim, and Hyochoong Bang. 2022. "Monocular Pose Estimation of an Uncooperative Spacecraft Using Convexity Defect Features" Sensors 22, no. 21: 8541. https://doi.org/10.3390/s22218541
APA StyleHan, H., Kim, H., & Bang, H. (2022). Monocular Pose Estimation of an Uncooperative Spacecraft Using Convexity Defect Features. Sensors, 22(21), 8541. https://doi.org/10.3390/s22218541