
An AVMD-DBN-ELM Model for Bearing Fault Diagnosis



Abstract
:1. Introduction
2. Methodology
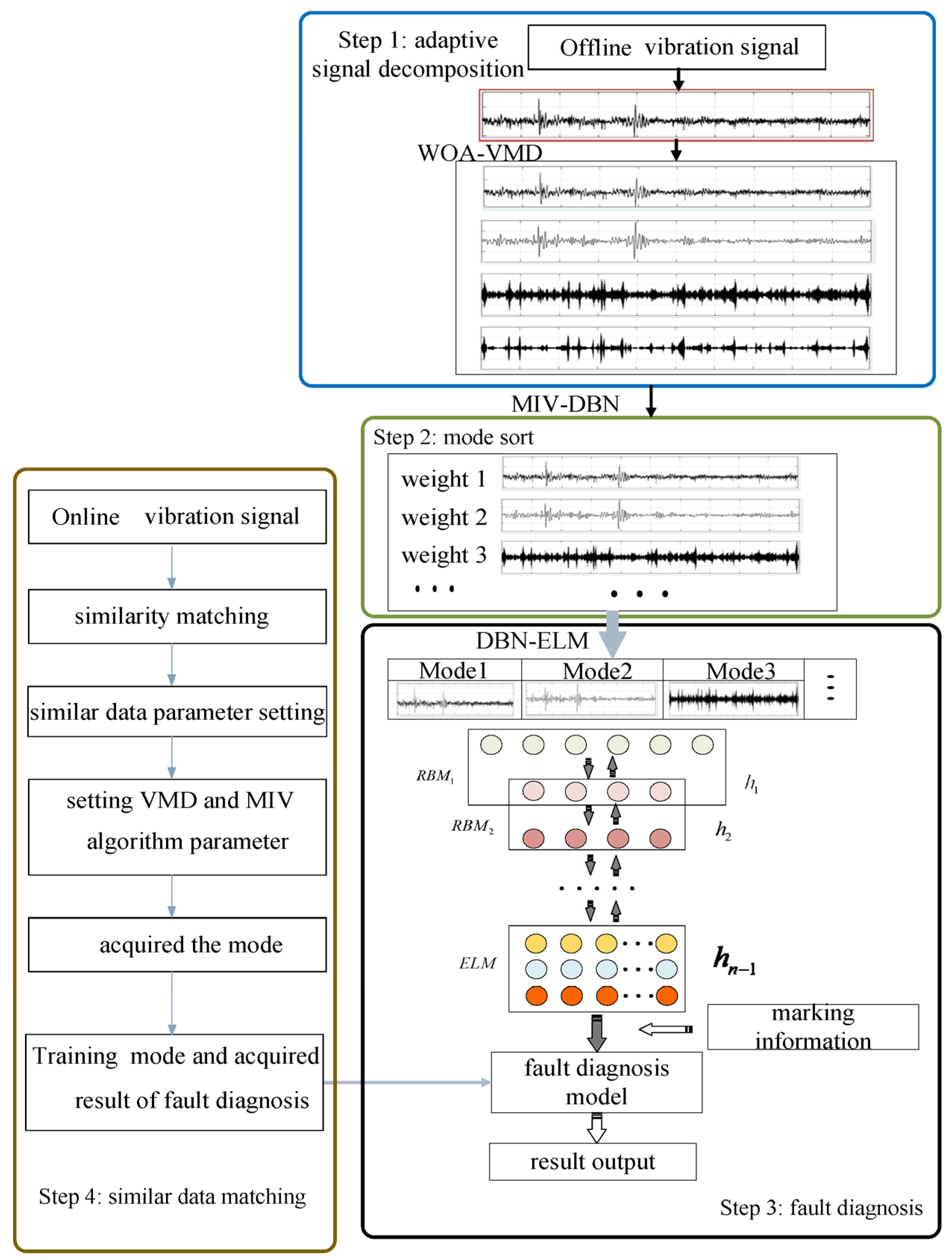
2.1. Framework
2.2. WOA-VMD Method for Decomposing Vibration Signals
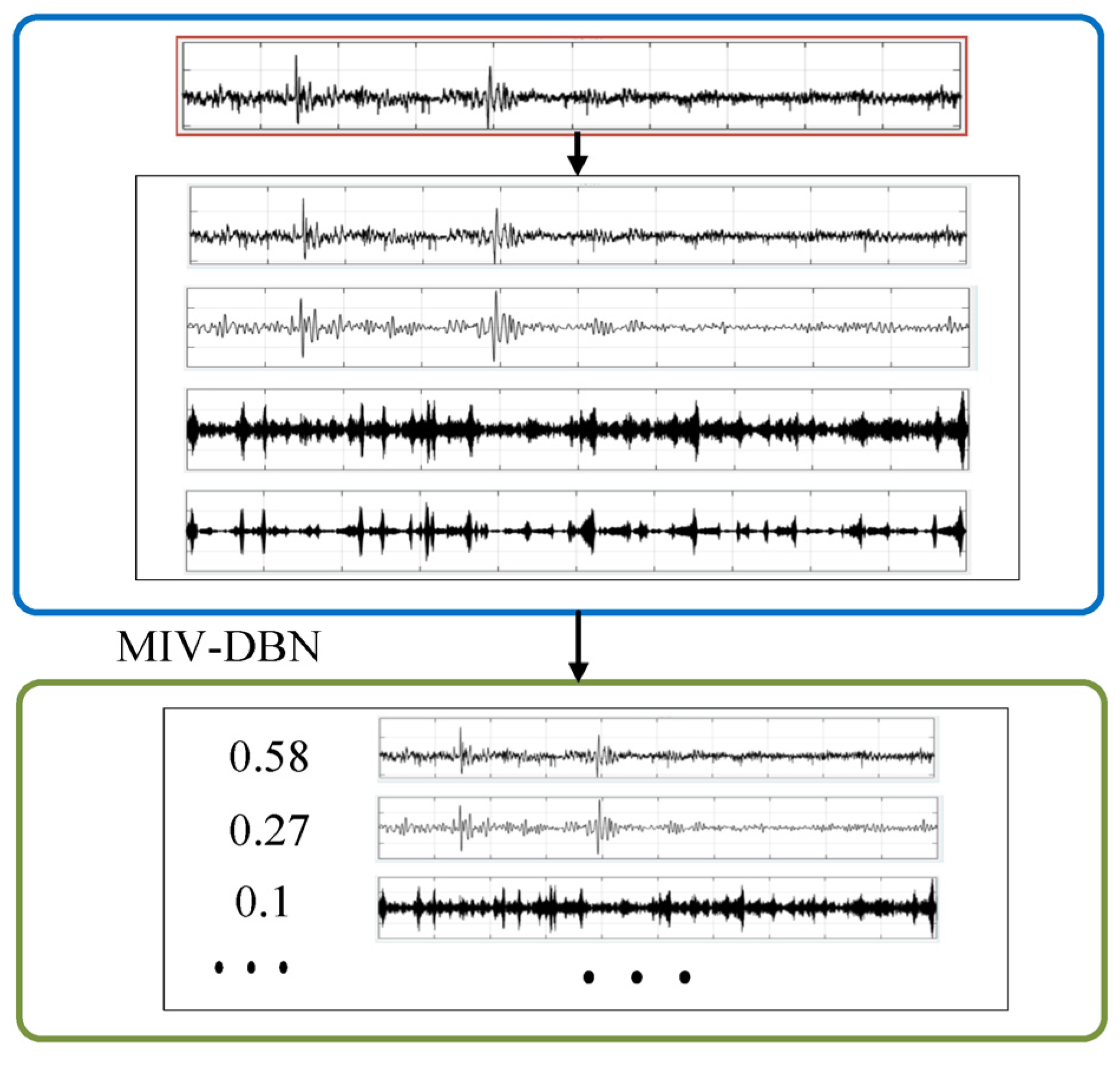
2.3. Mode Sort Based MIV-DBN Algorithm
2.4. The Process of the DBN-ELM Method to Build the Fault Diagnosis Model
2.5. The Process of Online Fault Diagnosis
3. Experimental Study
3.1. Dataset Description and Experimental Setting
3.2. Experimental Results
3.2.1. Results of Parameter Optimization
3.2.2. Results of Mode Sort
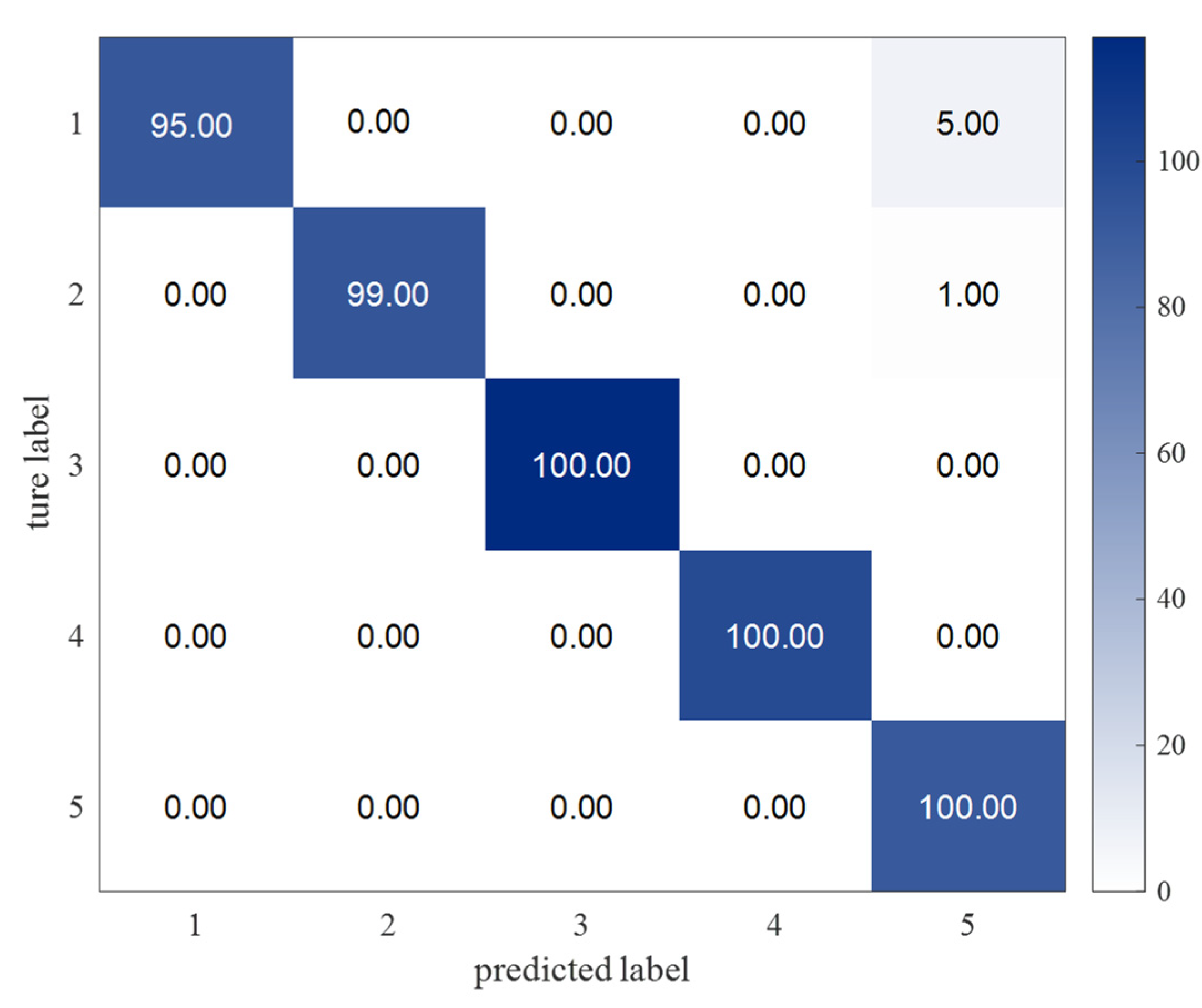
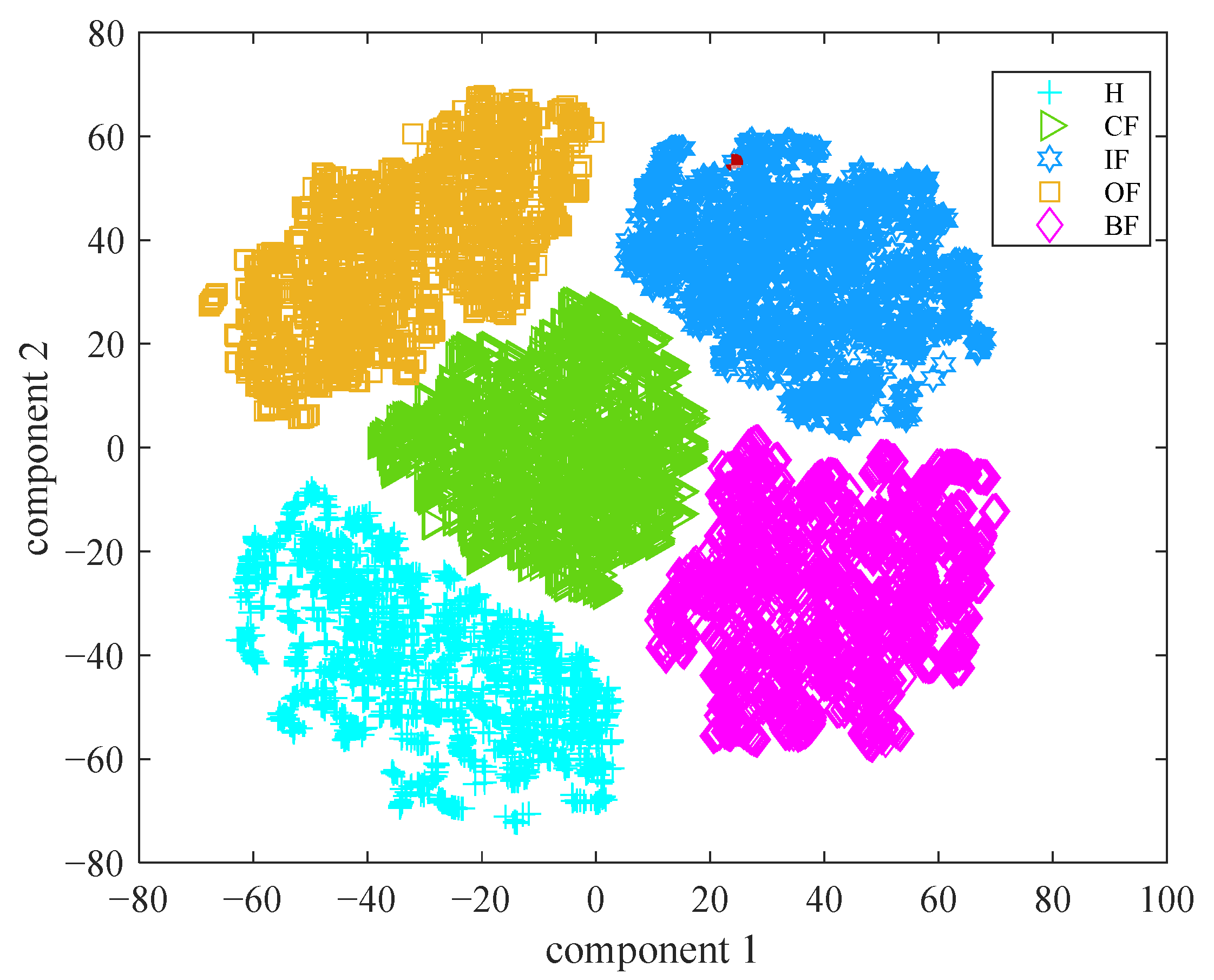
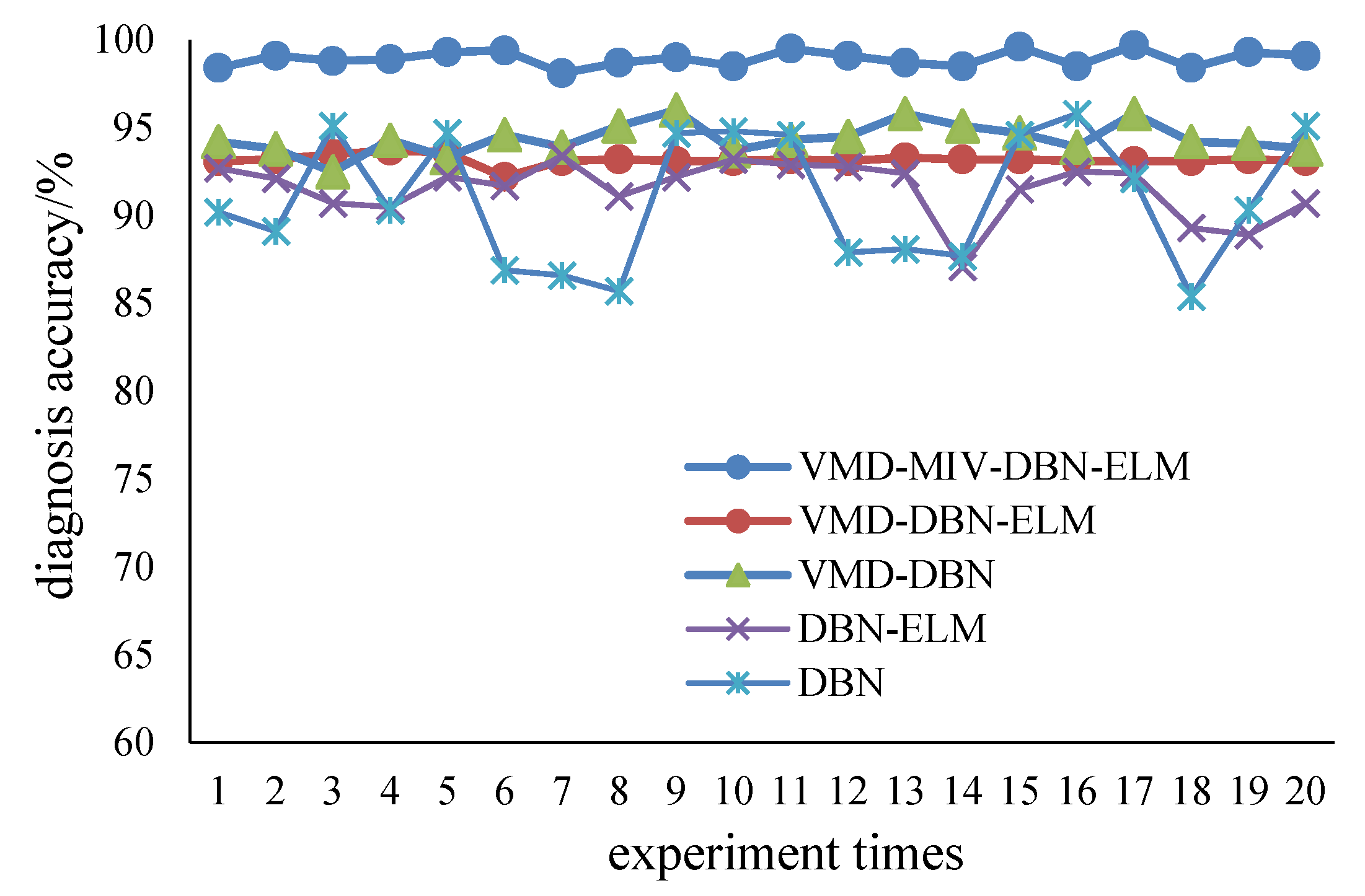
3.2.3. Results of Fault Diagnosis
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Ambrokiewicz, B.; Syta, A.; Gassner, A.; Georgiadis, A.; Litak, G.; Meier, N. The influence of the radial internal clearance on the dynamic response of self-aligning ball bearings. Mech. Syst. Signal Process. 2022, 171, 108954. [Google Scholar] [CrossRef]
- Wu, Y.; Jiang, B.; Wang, Y. Incipient winding fault detection and diagnosis for squirrel-cage induction motors equipped on crh trains. ISA Trans. 2019, 99, 488–495. [Google Scholar] [CrossRef] [PubMed]
- Gao, S.; Xu, L.; Zhang, Y.; Pei, Z. Rolling bearing fault diagnosis based on SSA optimized self-adaptive DBN. ISA Trans. 2021, 128, 485–502. [Google Scholar] [CrossRef] [PubMed]
- Yin, A.; Yan, Y.; Zhang, Z.; Li, C.; Sánchez, R.-V. Fault Diagnosis of Wind Turbine Gearbox Based on the Optimized LSTM Neural Network with Cosine Loss. Sensors 2020, 20, 2339. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Minhas, A.S.; Singh, S. A new bearing fault diagnosis approach combining sensitive statistical features with improved multiscale permutation entropy method. Knowl. Based Syst. 2021, 218, 106883. [Google Scholar] [CrossRef]
- Xu, Y.; Deng, Y.; Ma, C.; Zhang, K. The Enfigram: A robust method for extracting repetitive transients in rolling bearing fault diagnosis. Mech. Syst. Signal Process. 2021, 158, 107779. [Google Scholar] [CrossRef]
- Toma, R.N.; Prosvirin, A.E.; Kim, J.M. Bearing fault diagnosis of induction motors using a genetic algorithm and machine learning classifiers. Sensors 2020, 20, 1884. [Google Scholar] [CrossRef] [Green Version]
- Sohaib, M.; Kim, C.H.; Kim, J.M. A hybrid feature model and deep-learning-based bearing fault diagnosis. Sensors 2017, 17, 2876. [Google Scholar] [CrossRef] [Green Version]
- Chen, Z.; Mauricio, A.; Li, W.; Gryllias, K. A deep learning method for bearing fault diagnosis based on cyclic spectral coherence and convolutional neural networks. Mech. Syst. Signal Process. 2020, 140, 106683. [Google Scholar] [CrossRef]
- Mao, W.; Feng, W.; Liu, Y.; Zhang, D.; Liang, X. A new deep auto-encoder method with fusing discriminant information for bearing fault diagnosis. Mech. Syst. Signal Process. 2021, 150, 107233. [Google Scholar] [CrossRef]
- Zhao, B.; Zhang, X.; Zhan, Z.; Pang, S. Deep multi-scale convolutional transfer learning network: A novel method for intelligent fault diagnosis of rolling bearings under variable working conditions and domains. Neurocomputing 2020, 407, 24–38. [Google Scholar] [CrossRef]
- Li, Y.; Xu, S.; Chen, H.; Li, J.; Ma, K. A General Degradation Process of Useful Life Analysis Under Unreliable Signals for Accelerated Degradation Testing. IEEE Trans. Ind. Inform. 2022, 68, 1272–1282. [Google Scholar] [CrossRef]
- Dibaj, A.; Ettefagh, M.M. A hybrid fine-tuned VMD and CNN scheme for untrained compound fault diagnosis of rotating machinery with unequal-severity faults. Expert Syst. Appl. 2021, 167, 114094. [Google Scholar] [CrossRef]
- Dibaj, A.; Hassannejad, R.; Ettefagh, M.M. Incipient fault diagnosis of bearings based on parameter-optimized VMD and envelope spectrum weighted kurtosis index with a new sensitivity assessment threshold. ISA Trans. 2020, 114, 413–433. [Google Scholar] [CrossRef]
- Jiang, X.; Wang, J.; Shi, J.; Shen, C.; Huang, W.; Zhu, Z. A coarse-to-fine decomposing strategy of VMD for extraction of weak repetitive transients in fault diagnosis of rotating machines. Mech. Syst. Signal Process. 2019, 116, 668–692. [Google Scholar] [CrossRef]
- Altaf, M.; Akram, T.; Khan, M.A.; Iqbal, M.; Ch, M.M.I.; Hsu, C.H. A New Statistical Features Based Approach for Bearing Fault Diagnosis Using Vibration Signals. Sensors 2022, 22, 2012. [Google Scholar] [CrossRef]
- Liu, H.; Yao, D.; Yang, J.; Li, X. Lightweight Convolutional Neural Network and Its Application in Rolling Bearing Fault Diagnosis under Variable Working Conditions. Sensors 2019, 19, 4827. [Google Scholar] [CrossRef] [Green Version]
- Su, H.; Yang, X.; Xiang, L.; Hu, A.; Xu, Y. A novel method based on deep transfer unsupervised learning network for bearing fault diagnosis under variable working condition of unequal quantity. Knowl. Based Syst. 2022, 242, 108381. [Google Scholar] [CrossRef]
- Mirjalili, S.; Lewis, A.D. The whale optimization algorithm. Adv. Eng. Softw. 2016, 95, 51–67. [Google Scholar] [CrossRef]
- Dombi, G.W.; Nandi, P.; Saxe, J.M.; Ledgerwood, A.M. Prediction of Rib Fracture Injury Outcome by an Artificial Neural Network. J. Trauma 1995, 39, 915–921. [Google Scholar] [CrossRef]
- Bahdanau, D.; Cho, K.; Bengio, Y. Neural Machine Translation by Jointly Learning to Align and Translate. arXiv 2014, arXiv:1409.0473. [Google Scholar]
- Borgwardt, K.M.; Gretton, A.; Rasch, M.J.; Kriegel, H.P.; Schlkopf, B.; Smola, A.A.J. Integrating structured biological data by Kernel Maximum Mean Discrepancy. Bioinformatics 2006, 22, e49–e57. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Huang, H.; Baddour, N.; Liang, M. Bearing fault diagnosis under unknown time-varying rotational speed conditions via multiple time-frequency curve ex-traction. J. Sound Vib. 2018, 414, 43–60. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Bearing Health Conditions | Varying Speed Setups | Label | Training Dataset | Testing Dataset |
|---|---|---|---|---|
| H | SI | 1 | 10,500 | 4500 |
| SD | 10,500 | 4500 | ||
| SID | 10,500 | 4500 | ||
| SDI | 10,500 | 4500 | ||
| OF | SI | 2 | 10,500 | 4500 |
| SD | 10,500 | 4500 | ||
| SID | 10,500 | 4500 | ||
| SDI | 10,500 | 4500 | ||
| IF | SI | 3 | 10,500 | 4500 |
| SD | 10,500 | 4500 | ||
| SID | 10,500 | 4500 | ||
| SDI | 10,500 | 4500 | ||
| BF | SI | 4 | 10,500 | 4500 |
| SD | 10,500 | 4500 | ||
| SID | 10,500 | 4500 | ||
| SDI | 10,500 | 4500 | ||
| CF | SI | 5 | 10,500 | 4500 |
| SD | 10,500 | 4500 | ||
| SID | 10,500 | 4500 | ||
| SDI | 10,500 | 4500 |
| Bearing Fault | Number of K | Value of α |
|---|---|---|
| H-SI | 7 | 1997 |
| H-SD | 7 | 1989 |
| H-SID | 7 | 1948 |
| H-SDI | 7 | 2000 |
| OF-SI | 7 | 1995 |
| OF-SD | 7 | 1982 |
| OF-SID | 7 | 1993 |
| OF-SDI | 7 | 1999 |
| IF-SI | 7 | 1956 |
| IF-SD | 6 | 1935 |
| IF-SID | 6 | 1936 |
| IF-SDI | 7 | 1987 |
| BF-SI | 7 | 1980 |
| BF-SD | 6 | 1995 |
| BF-SID | 7 | 1493 |
| BF-SDI | 6 | 1981 |
| CF-SI | 7 | 1946 |
| CF-SD | 7 | 1955 |
| CF-SID | 6 | 1155 |
| CF-SDI | 6 | 1829 |
| Method | Average Accuracy (%) | Standard Deviation | Time (s) |
| VMD-MIV-DBN-ELM | 98.93 | 0.288 | 437.65 |
| VMD-DBN-ELM | 93.17 | 0.452 | 364.37 |
| VMD-DBN | 94.38 | 0.868 | 583.24 |
| DBN-ELM | 91.52 | 1.605 | 294.25 |
| DBN-BP | 90.99 | 3.666 | 388.58 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lei, X.; Lu, N.; Chen, C.; Wang, C. An AVMD-DBN-ELM Model for Bearing Fault Diagnosis. Sensors 2022, 22, 9369. https://doi.org/10.3390/s22239369
Lei X, Lu N, Chen C, Wang C. An AVMD-DBN-ELM Model for Bearing Fault Diagnosis. Sensors. 2022; 22(23):9369. https://doi.org/10.3390/s22239369
Chicago/Turabian StyleLei, Xue, Ningyun Lu, Chuang Chen, and Cunsong Wang. 2022. "An AVMD-DBN-ELM Model for Bearing Fault Diagnosis" Sensors 22, no. 23: 9369. https://doi.org/10.3390/s22239369
APA StyleLei, X., Lu, N., Chen, C., & Wang, C. (2022). An AVMD-DBN-ELM Model for Bearing Fault Diagnosis. Sensors, 22(23), 9369. https://doi.org/10.3390/s22239369